水空两栖多旋翼飞行器出水控制及参数整定
2023-05-10李良博郭明明李忠广李泽斌
李良博,杨 宇,梁 爽,郭明明,李忠广,李泽斌
(1.大连海事大学,辽宁大连 116026;2.西南科技大学,四川绵阳 621000;3.西北工业大学,陕西西安 710072)
0 引言
水空两栖多旋翼飞行器具有传统的空中飞行器以及水下航行器的优点,同时具有良好的工作环境适应性和活动范围大等特点。
2012年,MIT 林肯实验室的Fabian 等[1]设计了一款仿鲣鸟微小型两栖无人飞行器。该样机多次成功实现了空-水介质转换(入水),验证了溅落方式入水的可行性。2014年,Drews等[2]考虑跨越细节,将跨越过程分空中和水下2 个阶段;根据建立的动力学模型设计了比例-微分(PD)控制器,初步验证了该结构实现跨介质过程的可行性。2015年,Neto等[3]采用切换方式完成跨介质过程。提出用于空气和水下介质控制的鲁棒控制器。由于缺乏考虑附加质量变化和浮动变化,无法实现无缝跨介质过程。2015年,Chen 等[4]在已有样机RoboBee的基础上提出了一种仿昆虫的扑翼式水空两栖跨介质无人飞行器样机。通过3D-CFD仿真计算和仿生样机实验发现,采用扑翼推进方式在水下和空中都可以实现比较好的俯仰控制,同时验证了RoboBee在水下环境开环控制的游动能力,并实现了其从空气介质到水体介质的转换。2015年,余宗金等[5]设计了一种模拟水空跨介质航行器的对称圆柱航行器物理模型用于研究水空跨介质航行器出水运动的规律。2015年,徐宝伟等[6]提出通过变形实现水空跨介质的变体无人机,并通过共形半环翼变体无人机论述了外形设计、气动水动特性、出水入水受力特性等待研究的问题。2017年,Siddall等[7]设计了一款桨式推进仿鲣鸟两栖飞行器。该飞行器采用仿飞乌贼喷射方式起飞,成功实现了从水下到空中的过渡。2019年,谭骏怡等[8]基于一种可变体的水空跨介质航行器的水下构型,利用CFD流体仿真软件,对其斜出水过程进行数值仿真,研究结果对跨介质问题提供了研究思路和理论参考。2020年,颜奇民等[9]针对跨介质航行器的水空跨越问题,设计了基于RBF神经网络实时整定参数的PID控制器。该控制器在姿态角控制上较传统PID控制器有更好的鲁棒性。2022年,聂星宇等[10]设计了一种倾转四旋翼跨介质飞行器构型。在控制策略上,设计了水面垂直起飞流程以及切换控制策略。
本文在国内外学者研究的基础上,针对前期搭建的水空两栖多旋翼飞行器样机,提出分段变参数PID跨介质出水控制方法,并结合遗传算法进行参数整定,对后续深入开展水空多旋翼飞行器跨介质整体样机的控制研究具有重要意义。
1 运动学和动力学建模
本文研究对象为自主研制的一种水空两栖六旋翼飞行器样机。该飞行器在空中和水下的动力均由旋翼提供。其中飞行器实物样机参数如表1所示。
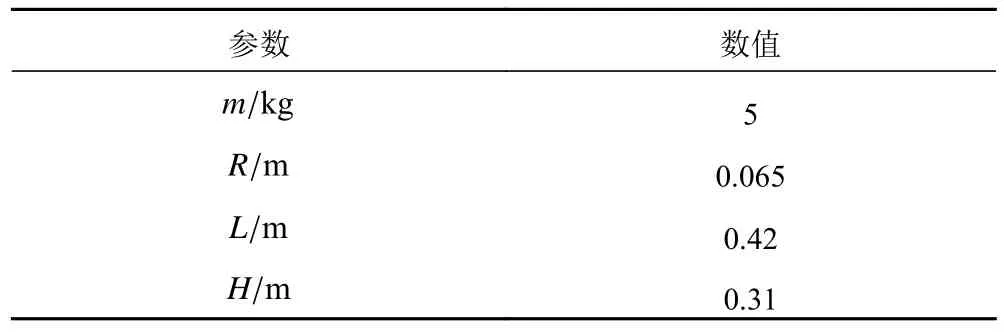
表1 水空多旋翼飞行器样机参数Tab.1 Parameters of water-air multi-rotor vehicle prototype
表中,m,R,L,H分别为飞行器的质量、防水仓半径、力臂长度、防水仓高。
飞行器坐标系示意图如图1所示。

图1 水空六旋翼飞行器坐标系示意图Fig.1 Diagram of coordinate system of water -air six-rotor aircraft
固定坐标系转换至机体坐标系的转换矩阵为:
式中: ϕ,θ,ψ分别为横滚、俯仰、偏航角。
机体坐标系转换至固定坐标系的转换矩阵为固定坐标系转换至机体坐标系的转换矩阵的逆。
将水空多旋翼飞行器的整个出水过程分为3个阶段,分别为水下航行阶段、水空跨越阶段以及空中飞行阶段。
为方便分析水空多旋翼飞行器的运动及受力情况,提出以下6点假设:1)水空多旋翼飞行器机体严格对称,且可看作一质量均匀分布的刚体;2)水空多旋翼飞行器机体的中心和重心都与机体坐标系的原点重合;3)重力加速度(系数)不变;4)忽略飞行器在空中时其旋翼对周围空气流动的影响;5)飞行器可近似为柱体;6)飞行器所在水域流速为零且流体不可压缩。
在建模前,对涉及到的物理量,包括在运动坐标系下的线速度和角速度,力和力矩,在固定坐标系下的位置、线速度、欧拉角等的符号进行定义,如表2所示。
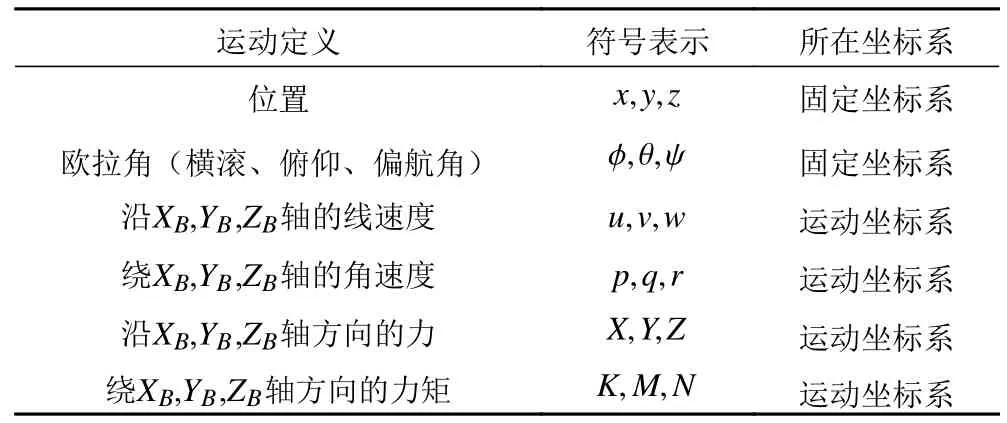
表2 本文涉及的物理量符号表示Tab.2 Symbolic representations of thephysical quantities involved in this paper
1.1 空中动力模型
根据牛顿欧拉公式,水空多旋翼飞行器空中飞行阶段动力学模型为[11,15]:
式中:m为 四旋翼飞行器的负载总质量;Ix,Iy和Iz分别为围绕对应轴的转动惯量;KDx,KDy,KDz为 空气阻力。
1.2 水下运动学、动力学模型
根据刚体动量定理以及刚体动量矩定理,并假设重心与机体坐标原点重合,水空多旋翼飞行器水下航行阶段及水空跨越阶段的动力学模型为[12]:
2 水空多旋翼飞行器水动力分析
水空多旋翼飞行器在水中做空间运动时,会受到水流在飞行器表面产生的水动力 τH、静力 τS(重力和浮力)、飞行器旋翼产生的控制力 τp以及包括风、浪、洋流等在内的未知的环境干扰力∆τ[12–13]。其所受合力 τRB可表示为:
其中,飞行器在水下受到的水动力主要为惯性水动力τA和粘性水动力 τD,即
2.1 惯性水动力τA
水空多旋翼飞行器在水中航行时,其周围的水由于飞行器的运动而产生运动,因为水有一定的惯性,所以飞行器会受到流体惯性力 τA。该力与飞行器加速度方向相反,大小成比例关系(比例系数为附加质量mi j,mi j表示刚体以单位线(角)加速度沿(绕)着i方向运动时,刚体在j方向上产生的附加质量)。
刚体在水下的附加质量只与刚体形状、刚体所处流体密度以及机体坐标系有关。假设该飞行器对称,且近似成圆柱,则附加质量矩阵可简化为式(6),并由式(7)进行计算。
其中:
2.2 粘性水动力τD
由于流体粘性的存在,刚体在其中运动时会受到流体产生的阻尼作用,即粘性力 τD,该力与刚体的运动状态密切相关。
对于水空多旋翼飞行器受到的粘性水动力,通过Fluent 流体力学仿真计算获取。假设飞行器是沿着z轴以0~1 m/s 的速度移动,则沿z轴方向的速度与粘性水动力(力矩)之间的关系如表3和表4所示。
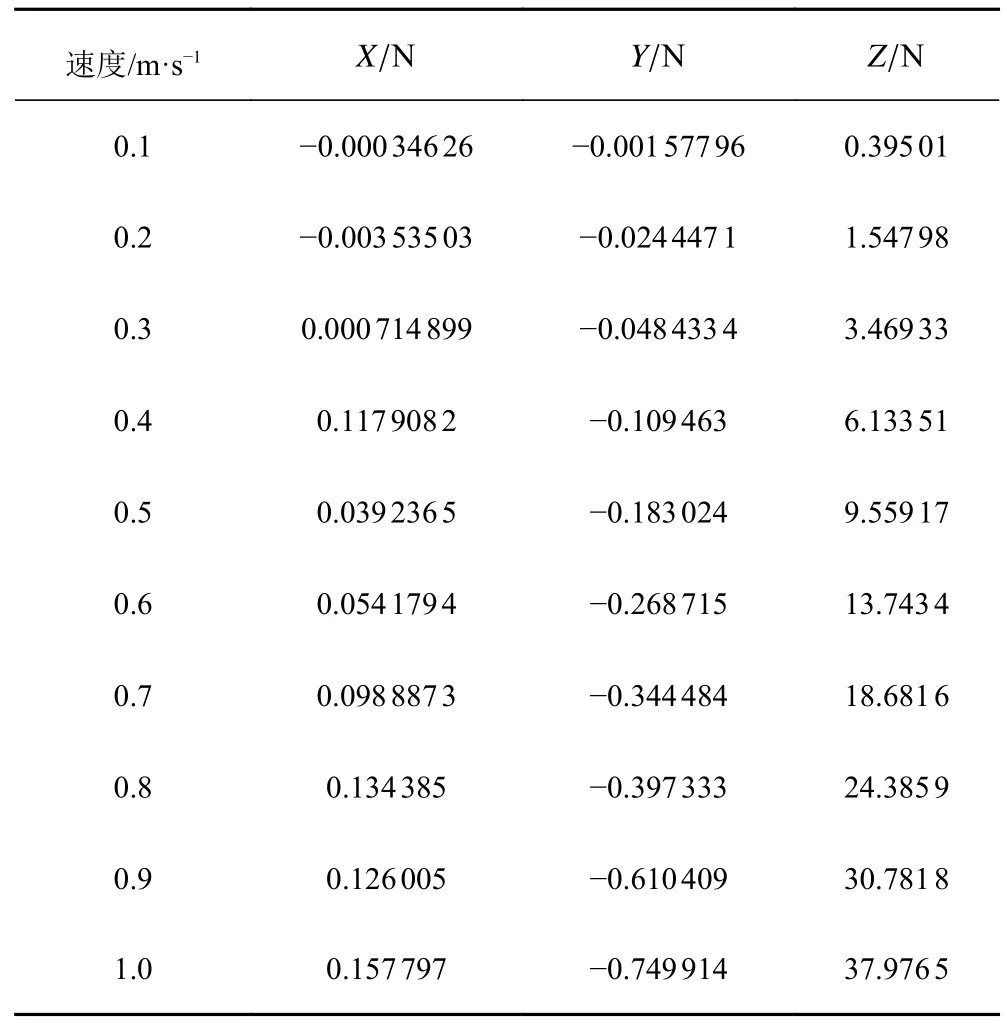
表3 粘性水动力测试表Tab.3 Viscous hydrodynamic test table
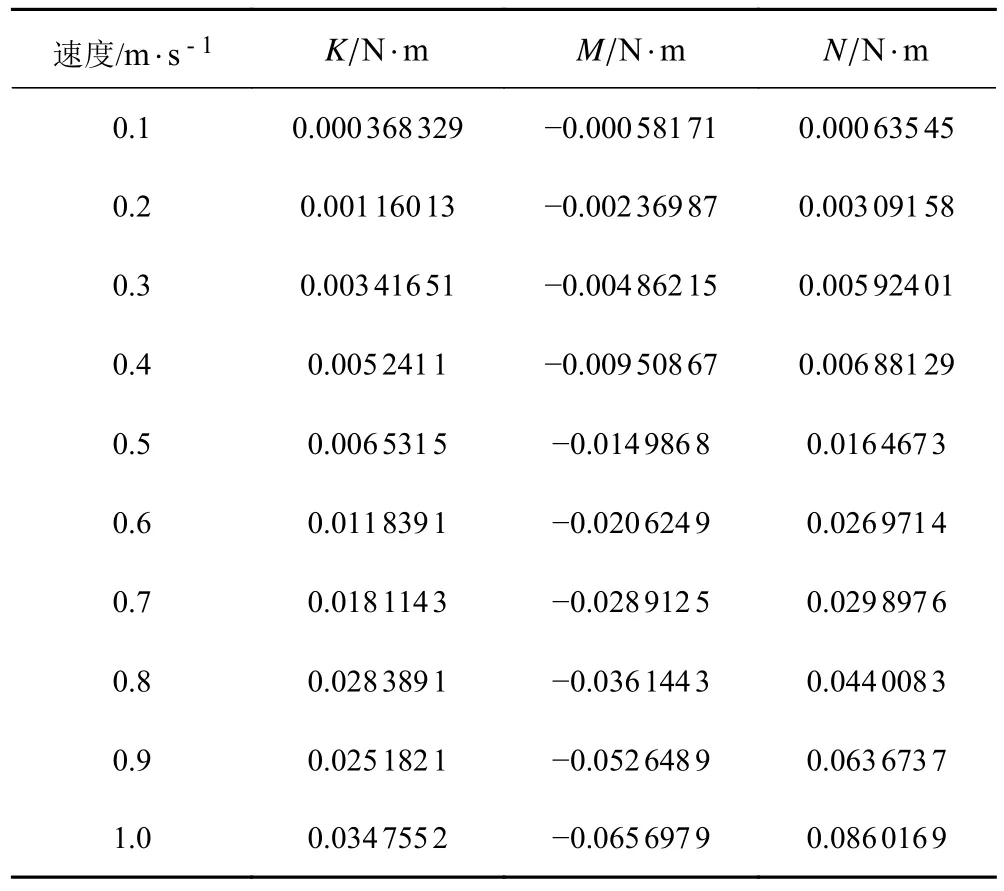
表4 粘性水动力力矩测试表Tab.4 Test tableof viscous hydrodynamic torque
根据仿真结果,可认为水空多旋翼飞行器只在z轴方向上受到粘性水动力,其他方向上的力和力矩均可忽略。将仿真数据进行拟合,得到速度w与粘性水动力的关系式:
2.3 静力与控制力
飞行器在水下运动所受的静力包括重力G和浮力B。当飞行器重心与其浮心不重合时,记其重心rGb和浮心rbB分别为:
在固定坐标系下,水空多旋翼飞行器的静力矩阵(相对于机体坐标系)为:
6 个电机分布如图2所示。假设在工作时,转速分别为n1,n2,n3,n4,n5,n6。水空两栖多旋翼飞行器电机产生的控制力(矩) τp为[14]:

图2 水空多旋翼飞行器电机分布Fig.2 Motor distribution of water -air vehicle
式中:b为运动坐标原点到其中一个电机的距离;KF,KT分别为螺旋桨推力系数和力矩系数;Da为不同类型螺旋桨的直径。
3 跨介质控制模型
采用PID控制算法[16–17]进行水空两栖多旋翼飞行器的出水控制研究,并在此基础上提出分段变参数控制方法。利用智能寻优算法对PID参数进行整定,形成自适应PID控制器。
目前,常用的智能寻优算法有粒子群优化算法[18]、蚁群算法[19]和遗传算法[20]等,本文选用遗传算法对PID 参数进行整定,完成基于自适应PID的水空多旋翼飞行器出水控制研究。
3.1 跨介质控制器搭建
在出水过程中,假设只考虑水空多旋翼飞行器的垂直运动和姿态变化,则可以将飞行器常用的串级控制器简化为图3所示的单级控制器。水空多旋翼飞行器的姿态控制和高度控制被分解为2 个独立的模块,在水空多旋翼飞行器的整个出水过程中,可以将飞行器的飞行高度以及姿态角进行分别控制。其中,由于水、空气2种介质物理性质相差巨大,在跨介质过程中(水下航行、水空跨越以及空中飞行),水空多旋翼飞行器的运动学、动力学模型将在某一瞬间产生突变。而PID 控制器自适应能力较差,在上述3种情况下,单一PID控制器难以达到最优的控制效果。因此,提出分段变参数PID跨介质出水的控制方法,3 个高度控制器分别作用于水下航行、水空跨越以及空中飞行3种状态。
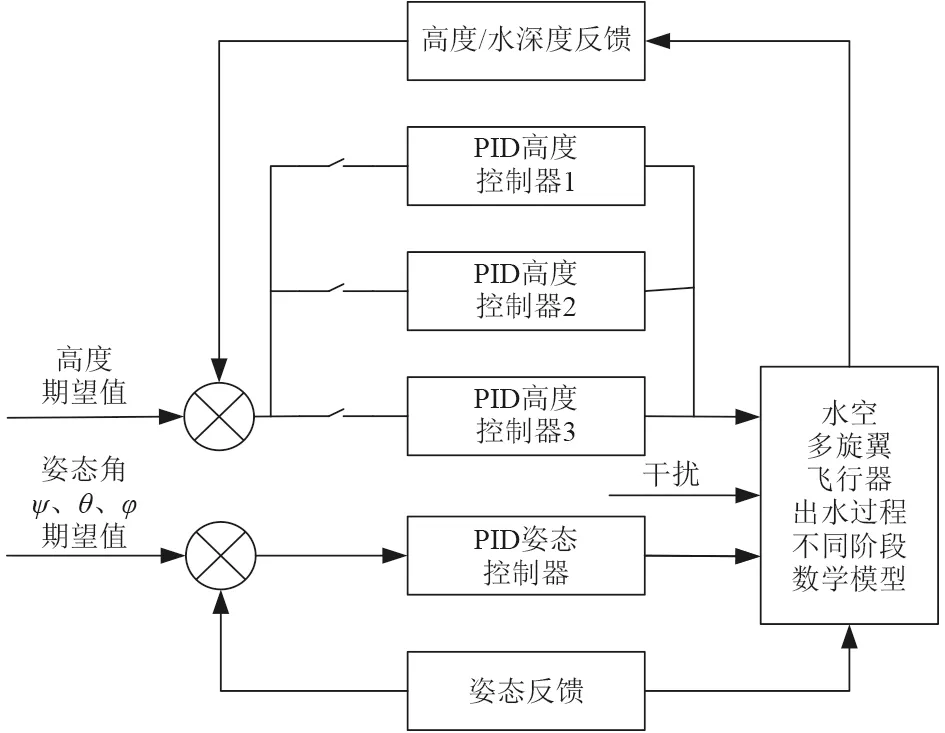
图3 飞行器出水过程不同阶段通用控制框图Fig.3 General control block diagram of different stages of aircraft outlet process
最终在Matlab/Simulink 中搭建的仿真模型。
3.2 基于遗传算法的PID参数整定
选取遗传算法对跨介质控制器进行参数寻优,算法流程如图4所示。该方法是一种不需要任何初始信息并可以寻求全局最优解的、高效的优化组合方法[21]。

图4 遗传算法流程图Fig.4 Flow chart of genetic algorithm
引入遗传算法对PID 参数进行整定,整定过程如图5所示。
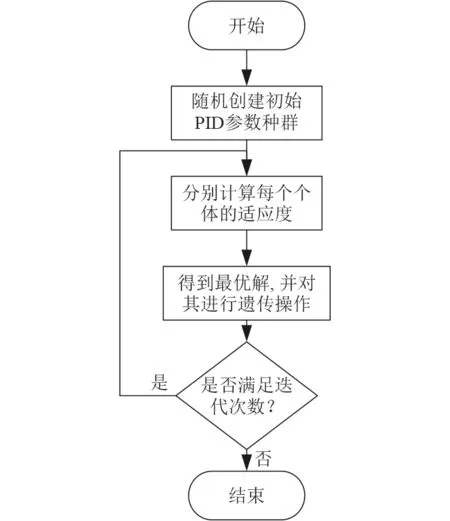
图5 引入遗传算法PID流程图Fig.5 Introduce genetic algorithm PID flow chart
按照水空多旋翼飞行器跨介质的理想控制效果,跨介质控制器参数寻优问题可转化为:在满足姿态稳定的情况下,控制的超调量尽可能小,用最短的时间到达目标,用适应度函数将上述要求进行综合。该优化问题的数学模型为:
式中:X={P,I,D}为待整定的PID控制器的参数;XL,XU分别为待整定参数的下界和上界;f为适应度函数;J为综合目标函数。
综合目标函数J的确定过程如下:
快速性、准确性和稳定性是衡量控制系统的3个指标。为了得到好的控制效果,对控制量、误差和上升时间进行约束。当确定了综合目标函数J后,可直接将其倒数作为适应度函数f,即f=1/J。
为得到满意的控制系统指标,主要采用加权误差绝对值对时间进行积分作为最小目标函数。为防止控制能量过大,在目标函数中还加入了控制器输入的平方项,则参数选取的最优指标为:
式中:e(t) 为实际状态x(t)与控制目标xaim的差;u(t)为控制量;tu为上升时间;w1,w2和w3为综合目标函数的权值。
为进一步抑制系统超调,增加“惩罚功能”,即当系统产生超调时,目标函数会把超调量作为指标中很重要的一项,此时最优指标为:
其中:
式中,w4为新引进综合目标函数的权值。
4 仿真结果及讨论
在仿真过程中,采用等效密度的方式处理出水过程中水空多旋翼飞行器受力的改变。假设水空交界始终保持静止,飞行器看做圆柱(见图6),其处于空气中和浸没在水中部分的长度分别为La和Lw,L为飞行器等效圆柱体的高,且有L=La+Lw,在水空跨越过程中,飞行器所受浮力为空气和水共同作用的结果,则飞行器出水阶段介质等效密度为:
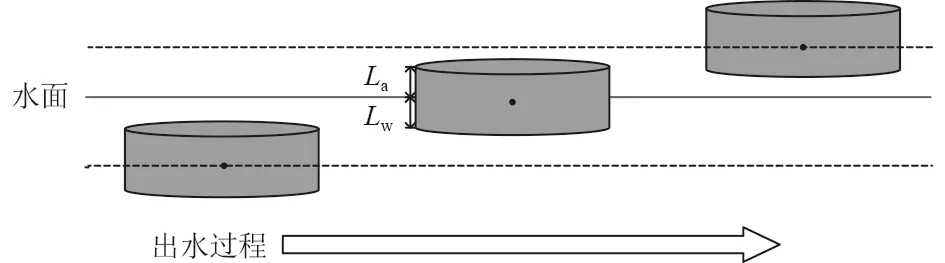
图6 水空多旋翼飞行器垂直出水等效示意图Fig.6 Equivalent schematic diagram of vertical outlet of water-air multi-rotor aircraft
4.1 经验法整定PID参数及结果图
经过反复实验尝试,人工整定得到的飞行器在水下阶段、水空跨越阶段以及空中阶段的PID 参数如表5所示(固定坐标系建立在水下2 m 处,在介质跨越过程中考虑了飞行器的高度)。
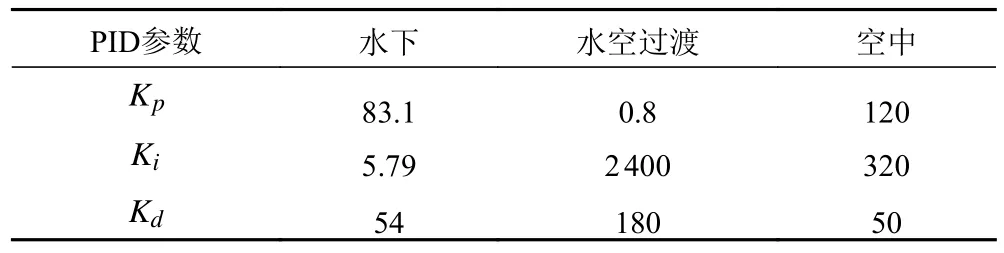
表5 分段PID控制参数Tab.5 Piecewise PID control parameters
得到的水下,水、空介质过渡,空中3个阶段的控制效果分别如图7~图9所示。
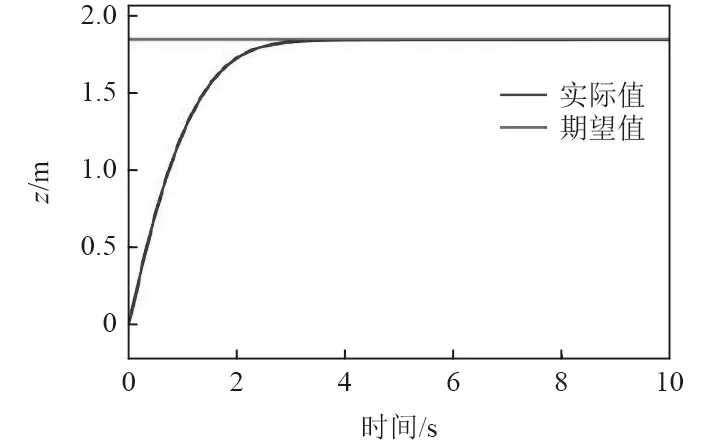
图7 水下阶段系统响应曲线图Fig.7 System response curve in underwater phase
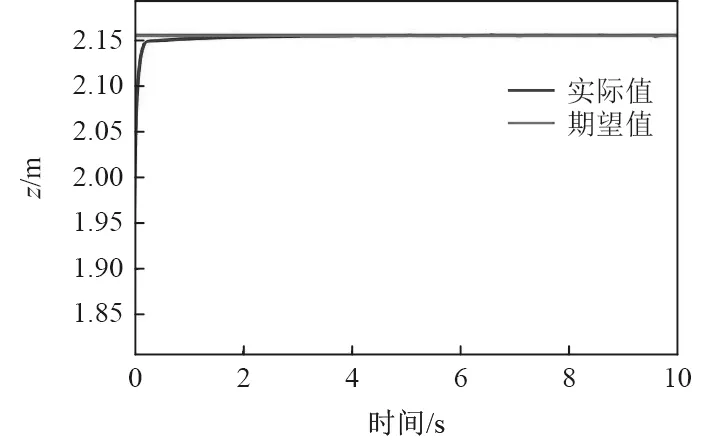
图8 水-空过渡阶段系统响应曲线图Fig. 8 System response curveof water-air transition stage

图9 空中阶段系统响应曲线图Fig.9 Aerial phase system response curve
针对水下航行阶 , 空 旋翼飞行器大约3 s 便可从水下到达水面,过程平稳且最终无静态误差;在水空跨越过程中,水空多旋翼飞行器的快速性极好,但存在较长时间的静态误差。对于空中飞行过程,人工经验得到的空中效果较差,大约4 s到达目标高度,且后续还存在周期性振荡。
本文提出的分段变参数PID控制方法更加贴合实际跨介质过程,可行性高。
4.2 遗传算法整定PID参数
遗传算法寻优PID 参数遵循以下原则:
1)快速性好;2)超调量小,无振荡、静态误差;3)介质跨越过程平缓。最终设置的遗传算法参数如表6所示。
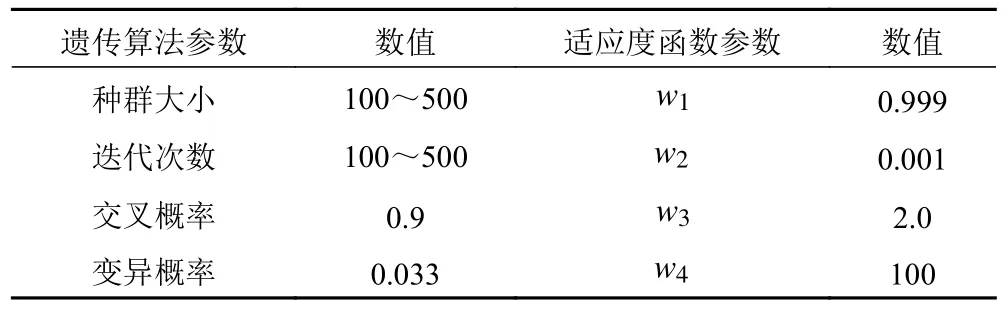
表6 遗传算法参数设置表Tab.6 Genetic algorithm parameter setting table
其中,参数w1,w2,w3和w4为固定值,交叉概率和变异概率在本文中也取为固定取值,分别为0.9 和0.033,种群大小、迭代次数以及PID参数的取值范围需要根据不同的跨越阶段进行设置。参数具体设置如表7 所示。
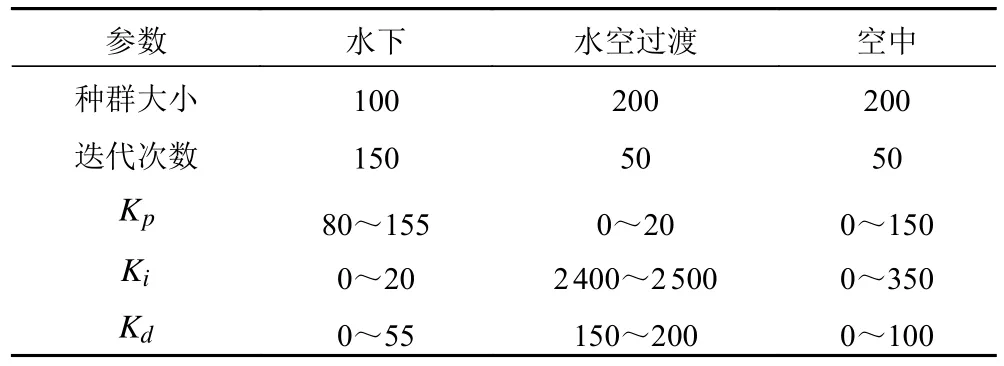
表7 遗传算法参数设置Tab. 7 Genetic algorithm parameter Settings
针对水空多旋翼飞行器跨介质的3个过程,遗传算法整定参数过程如图10所示。
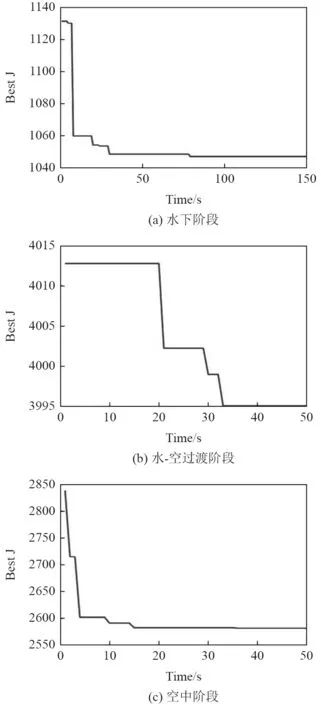
图10 优化过程Fig.10 Optimization process
在表7参数条件下,经过遗传算法寻优整定后得到的水下、水-空过渡、空中的最优PID参数分别为:Kp= 150.1,Ki= 12.189 0,Kd= 50.075 8;Kp= 13.1,Ki= 2 412.3,Kd= 150.3;Kp= 71.041 6,Ki= 37.981 7,Kd= 35.075 6。
同样,经过遗传算法整定后3个阶段的PID参数差异巨大,这再次反映出了水、空环境突变对PID控制算法影响巨大,有必要开展分段PID 控制。
4.3 引入遗传算法前后仿真结果对比分析
将上述寻优结果的参数放入搭建的模型当中,引入遗传算法前后的水空多旋翼飞行器出水过程的3 个阶段的控制仿真系统响应曲线对比如图11~图13所示。
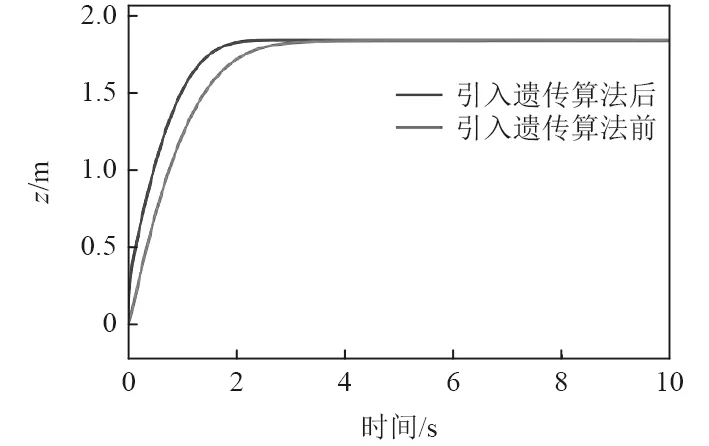
图11 引入遗传算法前后水下阶段系统响应曲线图Fig.11 System response curveof underwater stagebefore and after genetic algorithm wasintroduced
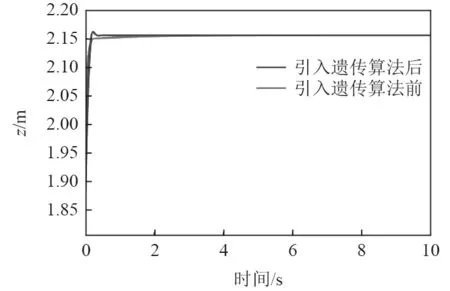
图12 引入遗传算法前后水-空过渡阶段系统响应曲线图Fig.12 System response curve of water-air transition stage before and after genetic algorithm was introduced
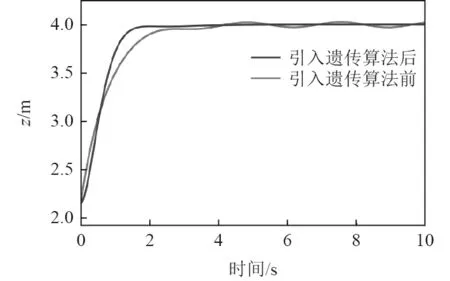
图13 引入遗传算法前后空中阶段系统响应曲线图Fig.13 Response curves of airborne phase system before and after theintroduction of genetic algorithm
分析可知:
1)针对水下航行过程,在引入遗传算法整定参数后,水空多旋翼飞行器由水下到达水面的时间从大约3 s缩短至大约2 s,提高了水空多旋翼飞行器在出水过程中的快速性。
2)在水空过渡阶段,引入遗传算法后,静态误差得到了一定的抑制,但引入了微小的超调,快速性也没有得到进一步提升。从总体上来看,水空过渡阶段的性能还是得到了一定提升。
3)对于空中飞行阶段,通过遗传算法优化后,消除了人工整定参数存在的振荡问题,同时提高了空中飞行过程的快速性,时间从大约4 s缩短至大约2 s。
综上,引入遗传算法后,水空多旋翼飞行器在整个跨介质过程中得到了更好的控制性能,更符合飞行器在水空跨越过程的实际情况,飞行器更稳定。
5 结语
本文以自主搭建的水空多旋翼飞行器样机为研究对象,针对水空多旋翼飞行器在水空跨越过程的不同阶段,建立了对应的动力学和运动学模型。运用Fluent对飞行器在水下受到的粘性水动力进行流体力学分析,进而得到其与速度之间的多项式函数关系。最后,本文利用Matlab搭建了简化的控制器系统,对飞行器的出水过程进行控制仿真,并将引入遗传算法前后的仿真结果进行对比,最终验证了分段变参数PID算法在水空多旋翼飞行器出水控制中的必要性,同时也证明了遗传算法整定PID参数的优越性。
