风力助航船的风速监测技术
2023-05-10郭亚娜孙晓锋
郭亚娜,孙晓锋,2
(1.江苏海事职业技术学院水上智能交通与海事服务研究所,江苏南京 211170;2.长江南京航道工程局,江苏南京 210011)
0 引言
船舶生产制造、海上航运等细分工业领域具有高污染、高能耗的特点,针对船舶工业领域的新能源开发也成为一项行业内的研究热点[1]。
海上蕴藏丰富的风能、太阳能等可再生能源,而这些可再生能源的利用却非常低,具有非常广阔的应用潜力。目前,基于光能和风能的新能源技术不断发展,风力助航船是一种利用风能进行船舶动力助航的船舶种类,相对于传统柴油动力船舶,风力助航船利用海上丰富的风能资源,可以提高船舶动力系统的能源利用率,降低船舶成本。
本文针对风力助航船的风速监测技术进行深入研究,建立一种基于超声波风速传感器的风速监测平台,详细阐述了风速监测平台的构成和工作原理。
1 风速监测技术的研究与发展现状
风向、风速监测技术经历了较长时间的发展,在各个领域都有重要的应用,尤其是气象监测、风电领域、船舶领域,常用的风速风向测试技术包括风杯测试法、超声波测试法等,本文在设计风力助航船的风速监测平台时,主要采用的是超声波风速测试传感器,超声波测试法又可以细分为时差法、多普勒法等,本文主要介绍多普勒法。
多普勒法是利用多普勒效率[2]进行风速风向测量的一种方法,当气体中含有悬浮颗粒时,超声波信号的多普勒频移可以表示为:
式中:fr为超声波发射器的发射信号频率;fs为超声波接收器的接收信号频率;V为风速; θ为超声波的入射角度;c为超声波在流体中传播的速度。
由式(1)可得风速为:
1)单向测速
图1为基于多普勒法的单向风速测量原理。
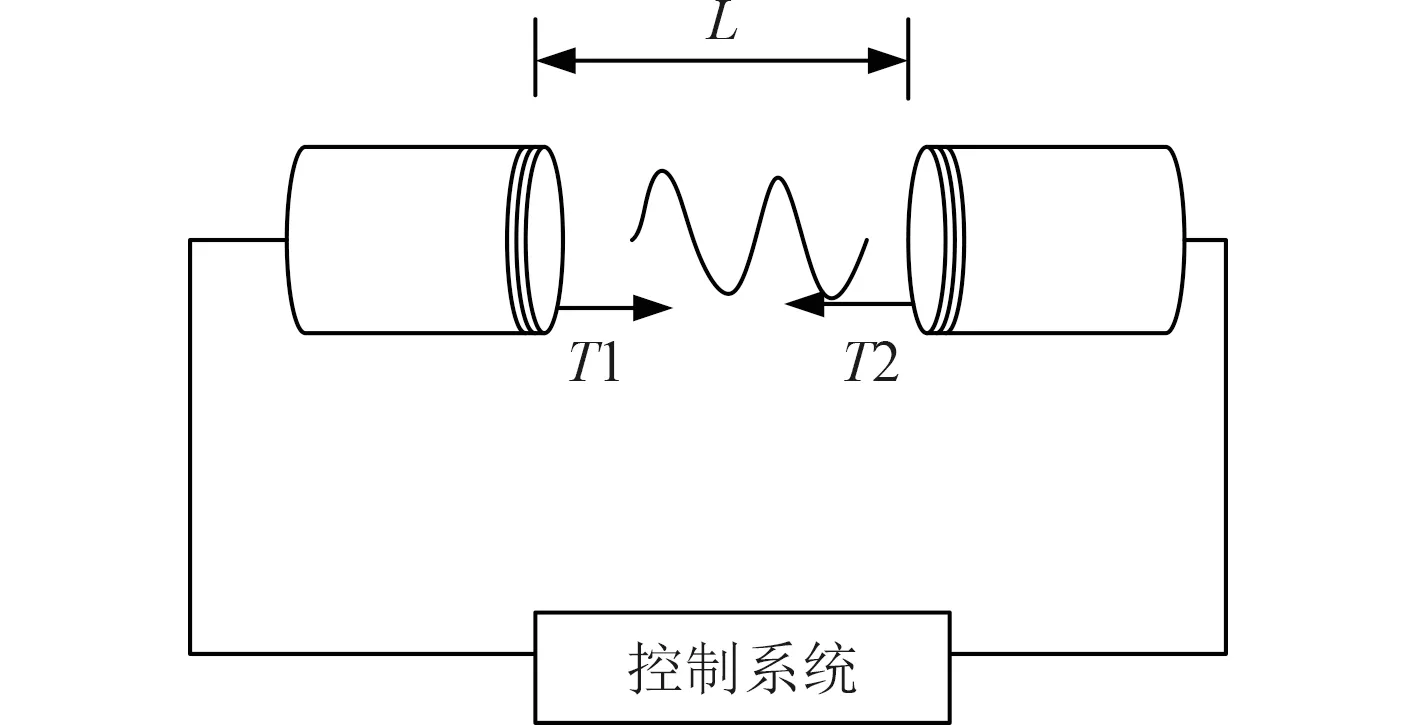
图1 基于多普勒法的单向风速测量原理Fig.1 Principle of one-way wind speed measurement based on Doppler method
假设2个超声波装置之间的距离为d,超声波传播的速度为Vs,此时风速为Vw,顺风时测的传播时间为t12, 逆风时传播时间为t21,可得:
进而得到风速Vw为 :
这种风速测量精度非常高,但只能测量单一风向的数据,且在实际应用场景中,风向往往是多向且不断变化的。
2)多向测速
多向测速的原理图如图2所示。
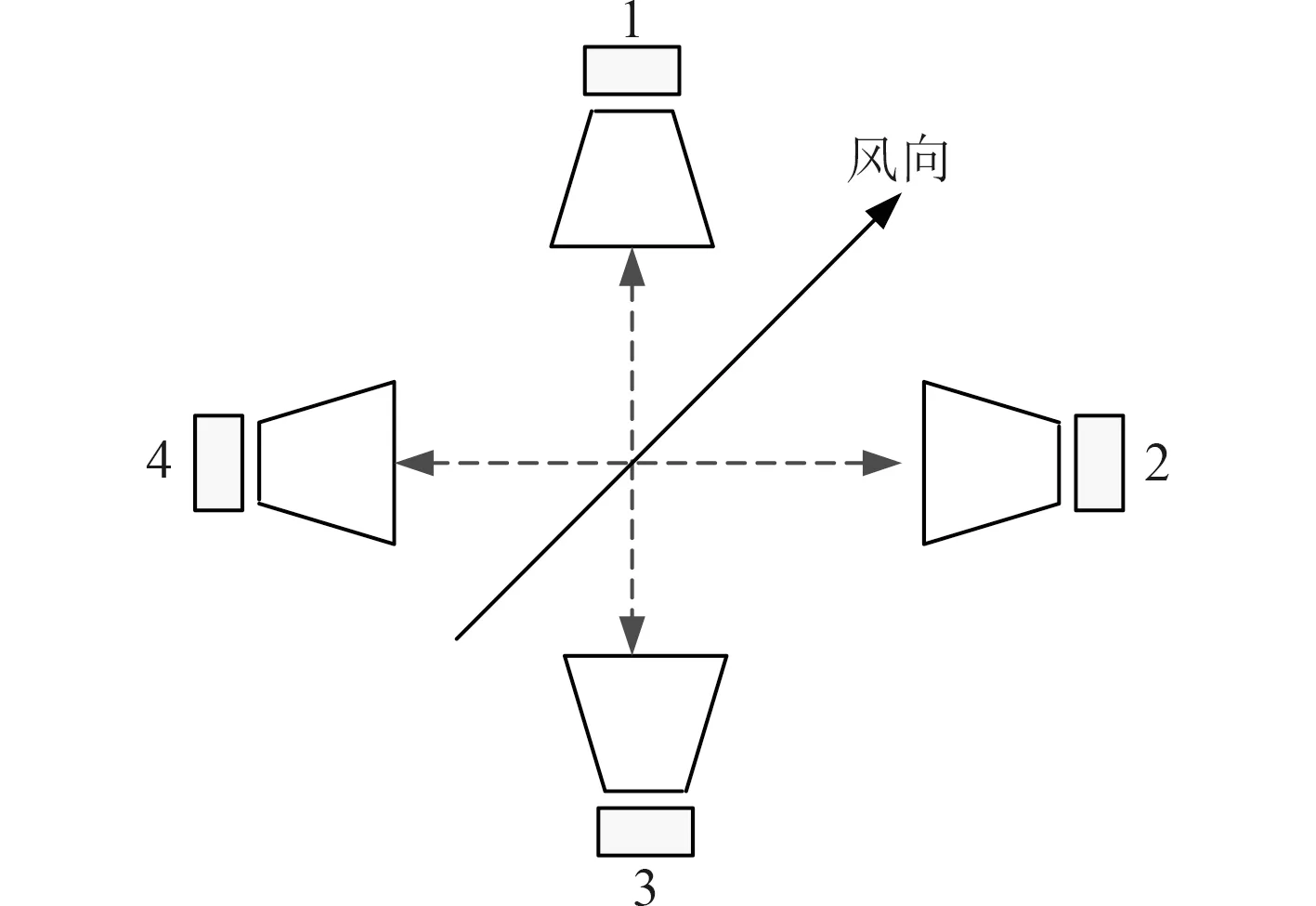
图2 基于多普勒法的多向风速测量原理Fig.2 Principle of multidirectional wind velocity measurement based on Doppler method
如图2,假设多个方向上有4组超声波装置,距离为d,超声波传播的速度为Vs,风速在南北方向上为Vwx,风速在东西方向上为Vwy,2组超声波装置测量得到的传播时间分别为:顺风时测的传播时间为t12,逆风时测的传播时间为t21;顺风时测的传播时间为t34,逆风时测的传播时间为t43。可得:
可求得此时的风速为:
此时的风向为:
2 基于单片机的风力助航船风速监测技术开发
2.1 风速监测系统的整体开发
风力助航船的风速监测平台具备以下功能:
1)数据的采集
监测平台基于超声波风速监测仪器和RS485通信电路,进行风速、风向的采集。同时,监测平台还会同步采集船的航行速度、姿态角等参数[3]。
2)数据传输
平台采集的风资源数据发送至单片机中和上位机中,并在上位机中进行存储,单片机通过RS232通信接口将指令传送至平台的其他单元。
3)数据的处理和显示
系统采用MSP430单片机进行数据的处理,并通过液晶显示器将风资源数据展示给用户,图3为风力助航船的风速监测平台原理图。

图3 风力助航船的风速监测平台原理图Fig.3 Schematic diagram of wind speed monitoring platform for a wind-aided vessel
1)主控制系统
主控制系统是风力助航船的风速监测平台核心,本文选用16位MSP430型单片机[4],该单元集成了60 Kflash 空间和2 k ram 存储空间,具有2个串行通信接口,既能与上位机进行串口数据传输,也能同步或异步接收风速仪的数据。
2)姿态仪
针对船舶多自由度运动过程的姿态参数采集需求,本文采用三轴加速度传感器MPU-600,该传感器的性能出众,具有三轴MEMS加速度计和可扩展处理器DMP。同时,姿态仪还具有其他数据接口,可以外接非惯性传感器,如温度传感器和压力传感器等。
3)液晶显示器
风力助航船监测平台采用LCD液晶显示器作为人机交互接口,LCD显示器通过PSB引脚[5]的高低电平确定串口显示,LCD液晶显示器的引脚时序图4。
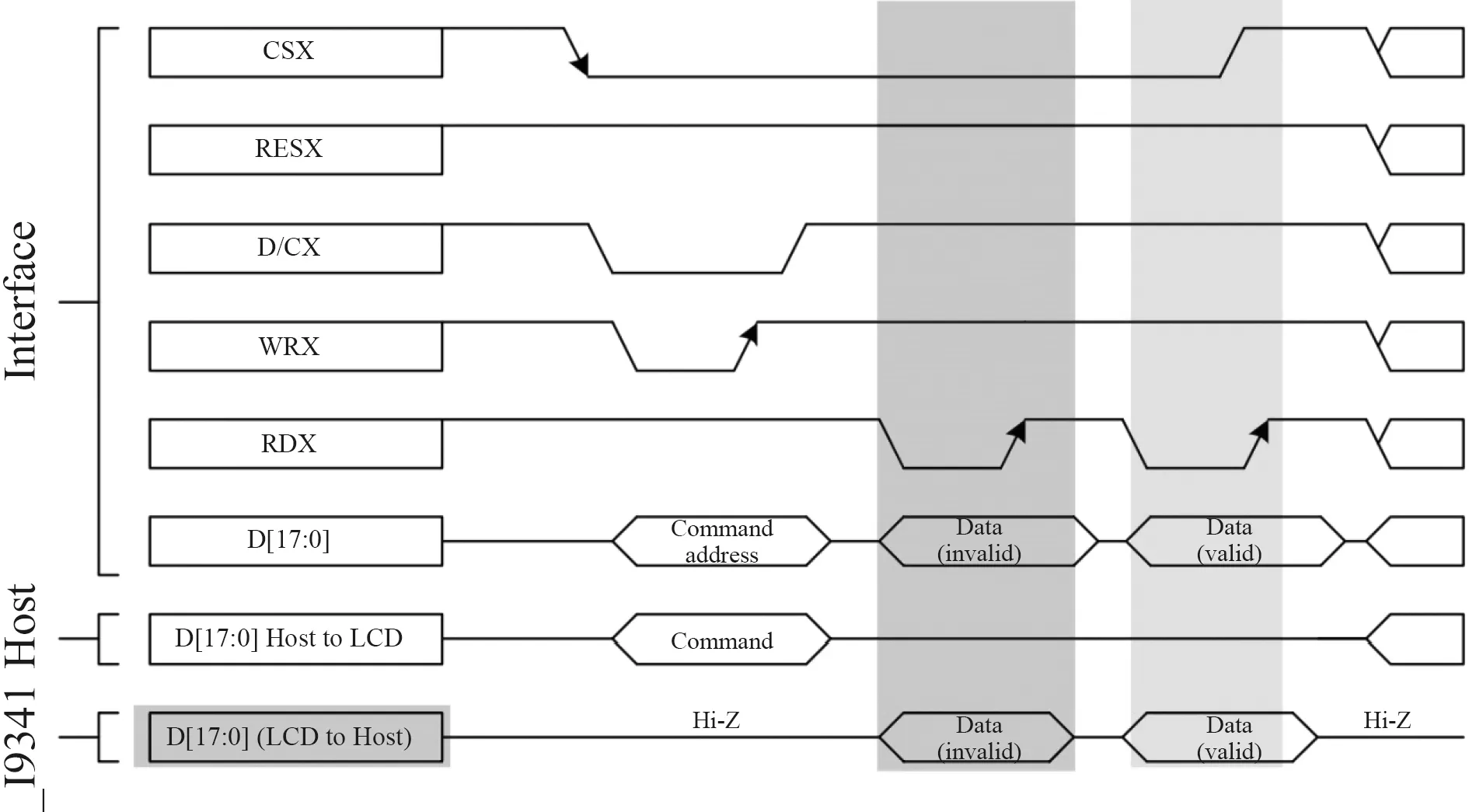
图4 LCD液晶显示器的引脚时序图Fig.4 Pin sequencediagram of LCD liquid crystal display
2.2 风力助航船的风速数据后处理研究
为了提高风速监测平台的数据采集精度,针对不同风向下的数据采集结果,本文提出一种风向矢量合成的数据后处理算法。该算法将风的空间矢量分解到X轴和Y轴两个分量,矢量合成的原理图5所示。
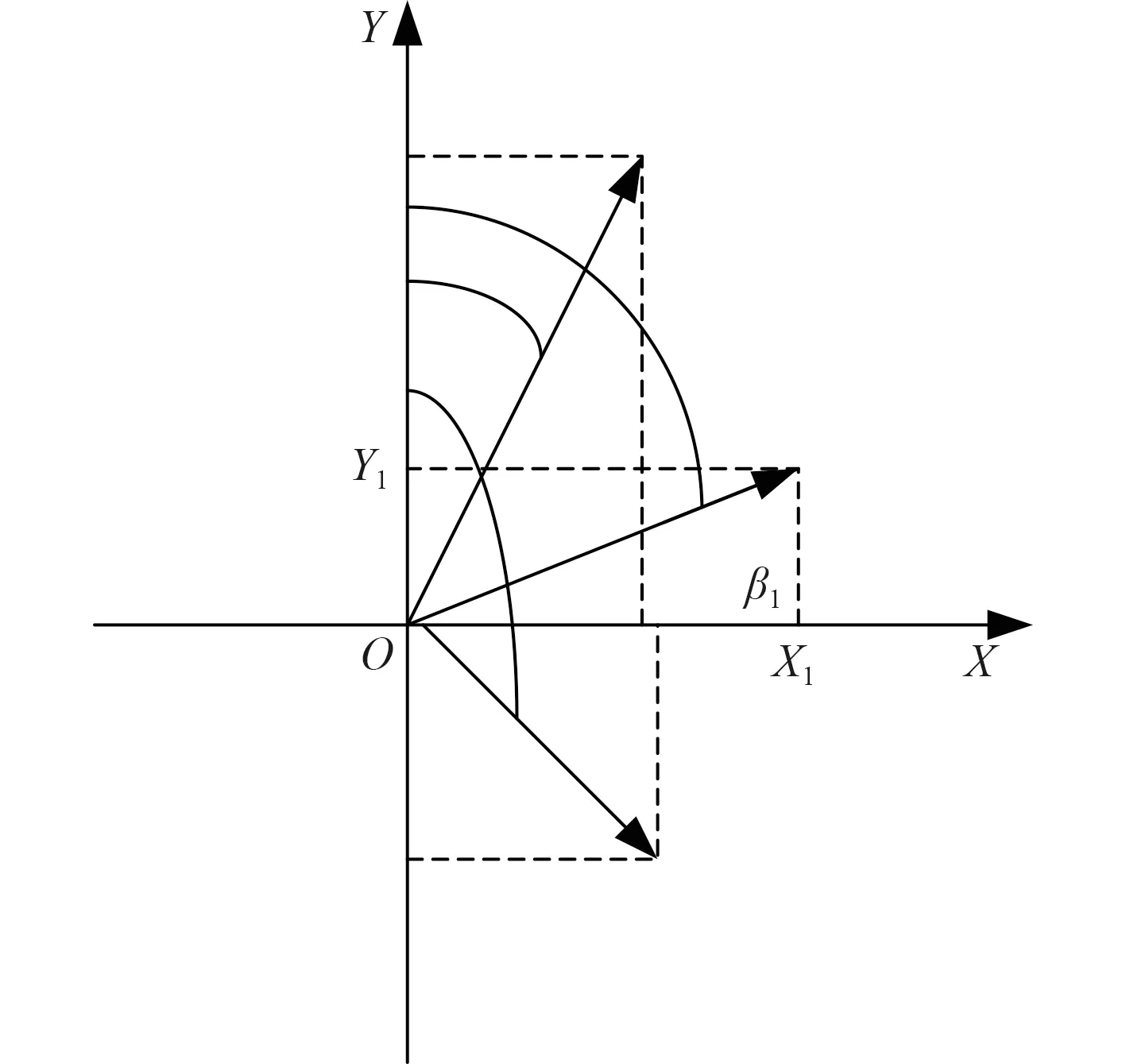
图5 风向矢量合成原理图Fig.5 Schematic diagram of vector synthesis
得到第一组测试数据的风向矢量分解为:
β1为第1组数据的风向,假设一次数据采集过程产生的数据量为n组,则可以得到:
得到风向的平均值和风向值为:
2.3 风力助航船风速监测系统平台工作流程
监测平台选用的风速风向仪为A45固体传感器,基于IEC6122通信协议[6],监测平台的工作流程图如图6所示。
3 结语
风力助航船是一种新兴的新能源船舶,这种船舶能够利用海上丰富的风力资源,提高自身动力系统的性能,风力助航船的关键控制输入是风资源数据,本文针对风资源数据的采集原理、平台建设、数据后处理等进行详细研究,有一定的实际应用价值。
