牙齿三维模型牙龈线计算方法及应用
2023-05-09江小辉黎万波吴重军刘杰
江小辉 黎万波 吴重军 刘杰
关键词:隐形牙套;牙齿模型;平均曲率;自动化;工业机器人
中图分类号:TP29 文献标识码:A
1 引言(Introduction)
隐形牙套矫治技术是20世纪90年代出现的一种牙齿正畸技术,其凭借外形美观、方便摘戴、易清理等优势逐渐取代了金属牙套在牙齿矫治领域的主流地位[1]。随着该技术的发展,市场对隐形牙套的需求量随之上升。实现隐形牙套的自动化加工能有效提升隐形牙套加工效率,但其中的难点在于获取驱动加工的数据。
数据获取分为两个部分,特征区域的识别和细化。牙齿三维模型特征识别领域主要有基于曲面的最小曲率的方法[2]和基于B样条曲线轮廓拟合算法的方法[3]等。特征区域细化领域主要有通过形态学算子提取特征线的方法[4]、基于快速移动分水岭算法的方法[5]以及基于活动轮廓模型的方法[6]。这些方法虽然能识别出特征曲线,但是需要设置阈值,导致难以实现自动化。
结合隐形牙套的加工需求和相关领域的研究现状,本文提出了一种基于曲率场的牙龈线自动提取方法。该方法克服了曲率阈值设置的困难,为牙龈线数据自动化应用提供了基础支撑。
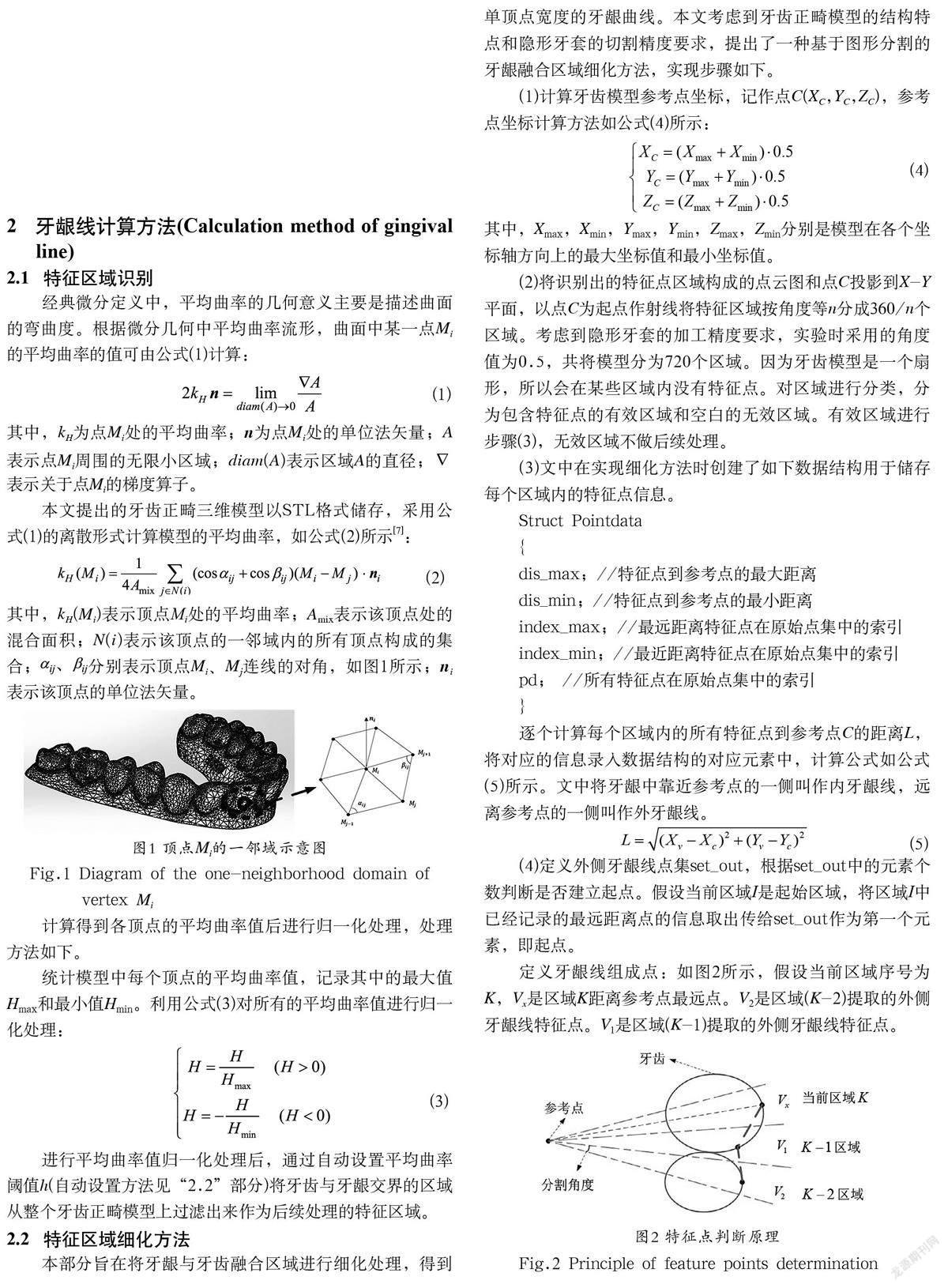
同理,可对y坐标和z坐标进行插值,最终得到的插值结果就是本文的牙龈融合区域识别提取的牙龈线特征点集。
3 程序实现过程(Implementation process of theprogram )
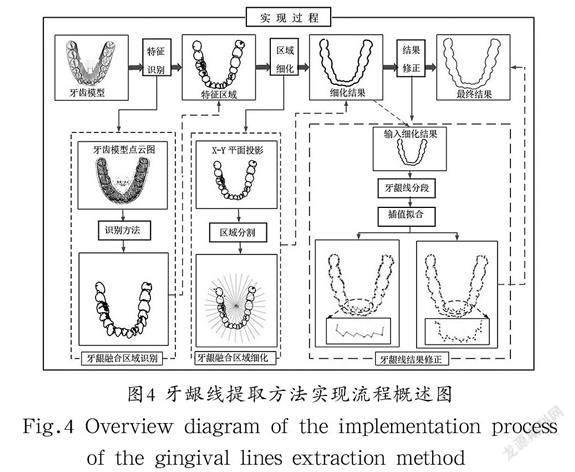
3.1 牙龈线提取流程
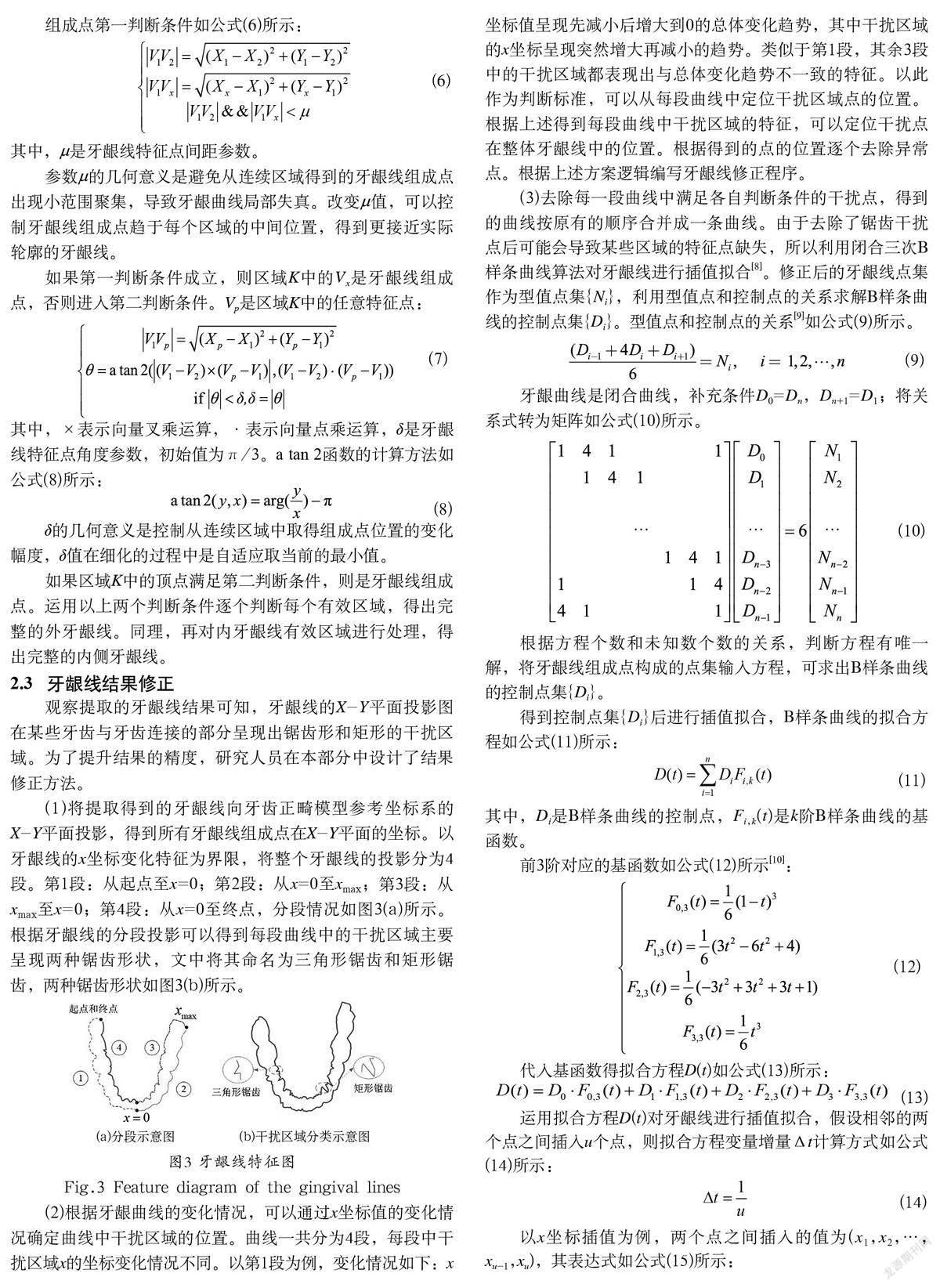
如图4所示,对应牙龈线提取方法理论的三个部分,其实现过程也分为三个部分,分别是牙龈融合区域识别、牙龈融合区域细化和牙龈线结果修正。
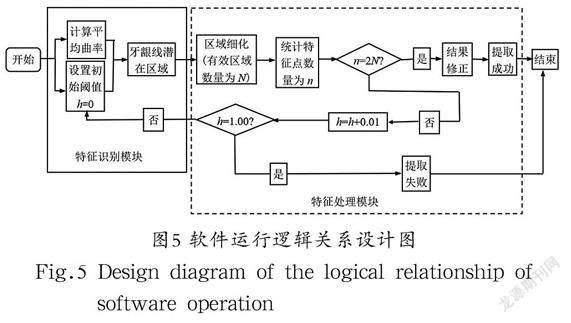
3.2 软件运行逻辑设计
为了便于程序设计,本文将方法实现过程分为两大模块,分别是特征识别模块和特征处理模块。特征识别模块是利用平均曲率识别牙龈融合区域的过程,特征处理模块是将融合区域细化并修正的过程。两个模块运行逻辑关系和运行方式如图5所示。
因为每个有效区域会贡献两个分别属于内外牙龈线的特征点,所以理论上得到的牙龈线组成点的个数是有效区域数量的2倍。经过细化过程得到的牙龈线的组成点数量作为平均区域阈值h设置是否合理的评价标准,通过程序判断是否提取成功。将细化结果与阈值h的设置过程结合,实现了平均曲率阈值h的自动化设置。
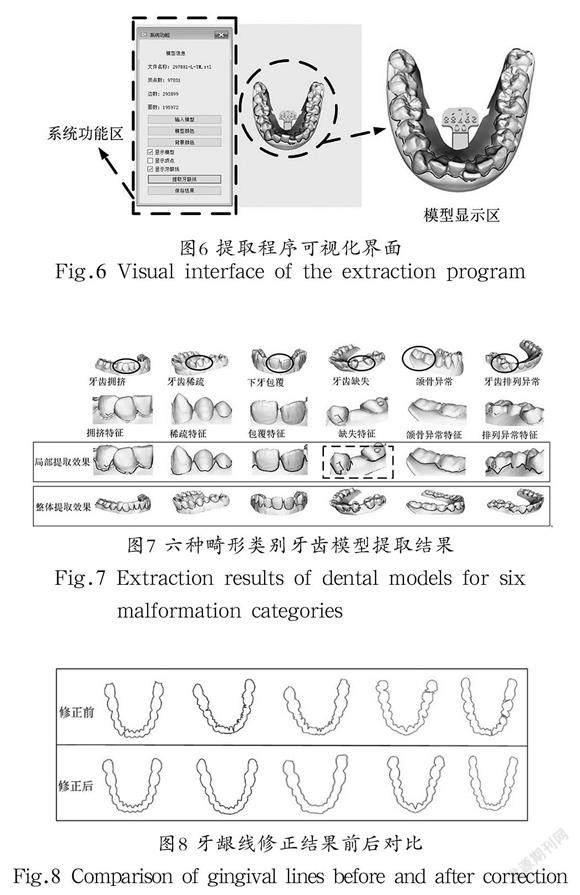
3.3 可视化界面设计
研究过程中开发了基于QT的程序界面,利用OpenGL库作为软件的三维渲染工具,如图6所示。用户可以利用程序界面导入模型、提取牙龈线、查看提取结果和保存提取数据。
4 实验和结果(Experiments and results)
4.1 不同畸形类型
牙齿模型提取实验实验使用了160个来自牙齿畸形病患的牙齿模型,验证该方法的有效性和准确性,实验结果如图7所示。这些牙齿模型包含上颌和下颌的几种主要的牙齿畸形类别,分别是牙齿拥挤、牙齿稀疏、下牙包覆、牙齿缺失、颌骨异常、牙齿排列异常[11]。
从图7中可以看出,该方法针对几种主要的牙齿畸形类别模型的牙龈线提取都是有效的,通过软件操作即可得到牙龈线的组成点坐标,但是对于缺牙类型模型得不到理想的提取结果,如图7中的虚线框内所示。
4.2 修正方法有效性测试
为了验证文中提出的修正方法的有效性,本节选择5个模型的牙龈线提取结果进行修正测试。分别将每个实验对象输入结果修正程序进行修正处理,统计修正结果如图8所示。
通过对比分析,证明了修正方法的有效性,明显去除了干扰区域,比修正前的牙龈曲线更接近真实的牙轮廓。
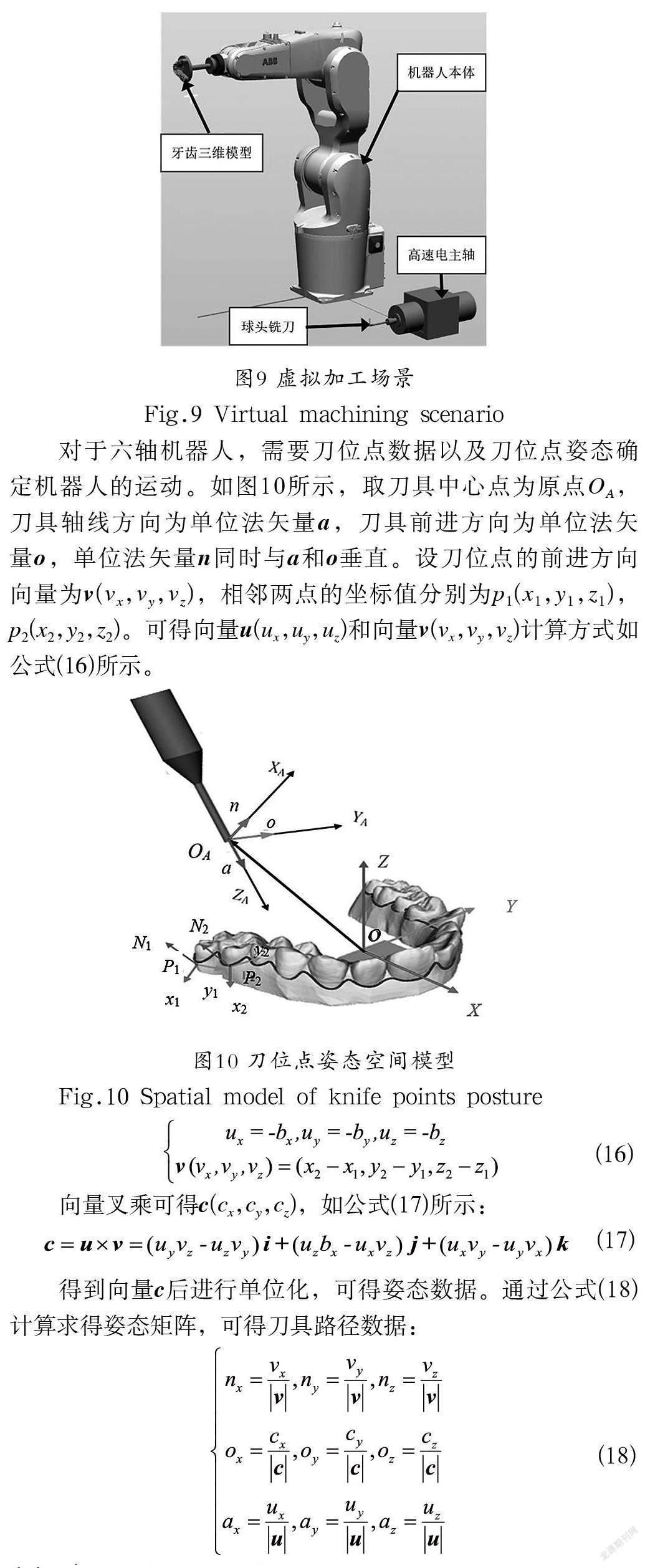
4.3 隐形牙套切割路径规划
得到向量c后进行单位化,可得姿态数据。通过公式(18)计算求得姿态矩阵,可得刀具路径数据:
4.4 隐形牙套加工实验
4.4.1 隐形牙套加工仿真实验
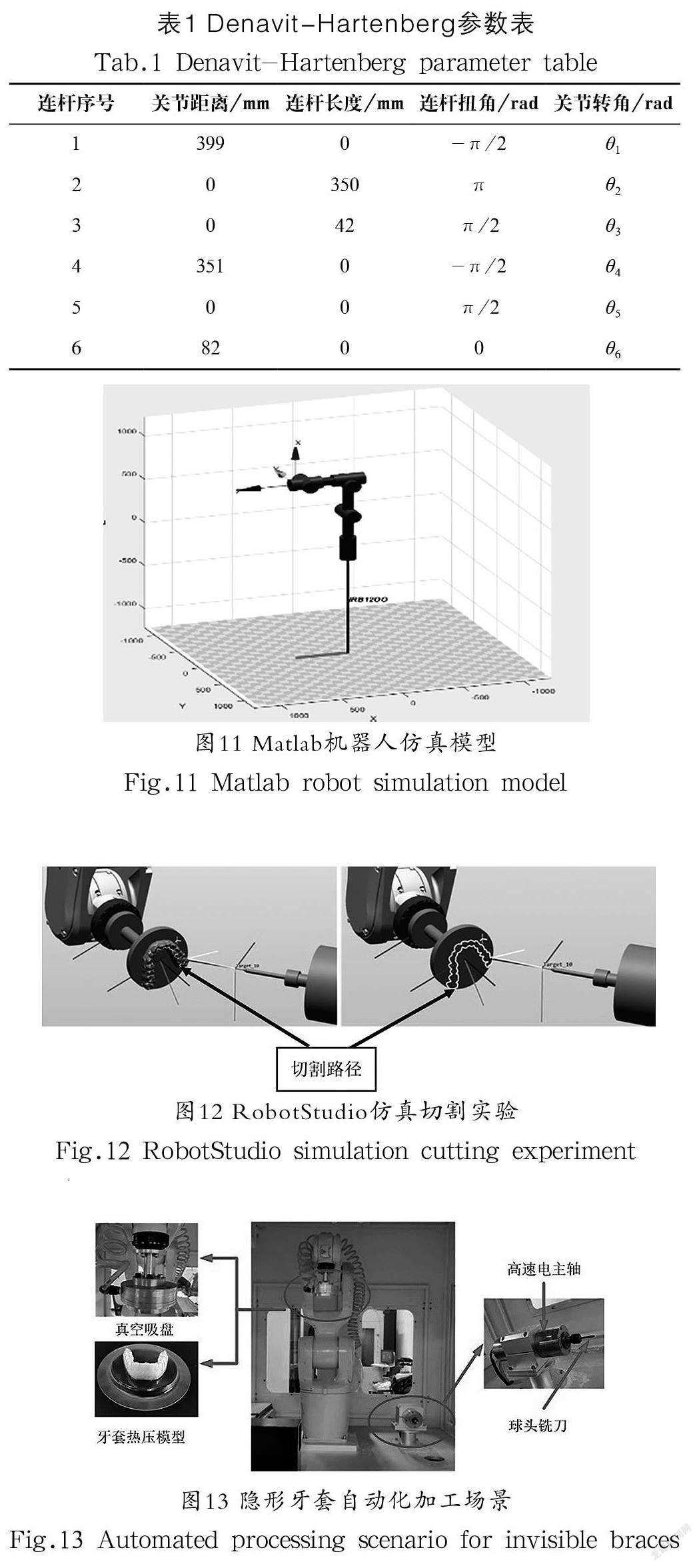
仿真实验分为两步,分别是利用Matlab机器人工具箱进行可行性仿真和利用RobotStudio进行切割场景仿真。首先基于表1的参数建立机器人运动学模型如图11所示,然后导入上述计算得到的刀位点姿态数据,结合机器人工具解函数进行仿真。
利用Matlab检测过刀具路径的可行性后,在RobotStudio中建立隐形牙套的加工场景,如图9所示,将刀具姿态数据编译成ABB机器人的执行代码导入RobotStudio机器人虚拟控制系统中,生成加工轨迹,如图12所示。
从仿真结果可知,加工轨迹是沿着模型的牙龈线形状运动,仿真结果符合预期。
4.4.2 隐形牙套切割实验
根據虚拟加工场景规划实际加工场景,如图13所示。
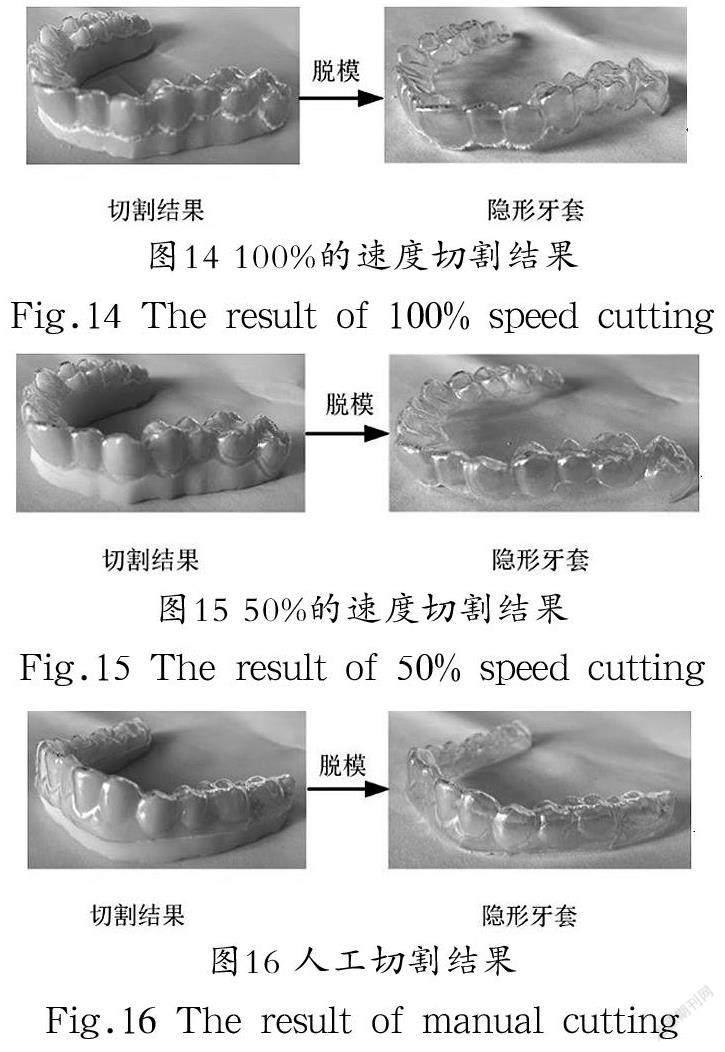
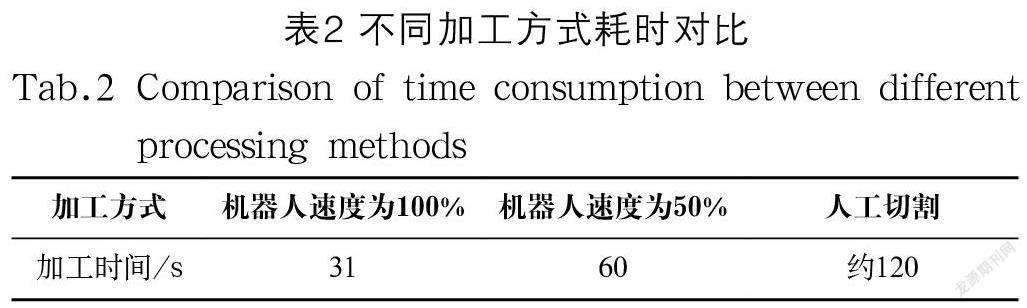
实验中采用的主轴转速为20000 r/min,球头铣刀直径的参数为R1·4·D4·50L·2F,机器人的运行速度为100%、50%,分别如图14和图15所示,实验过程中以某熟练工人手工切割隐形牙套作为对照,实验结果如图16所示。
利用本文的提取方法计算牙龈线数据,用于机器人路径规划,实现了自动化切割取代人工切割,并且得到的隐形牙套形状符合牙龈轮廓,说明该牙龈线提取方法的可行性。如图14所示,在机器人运行速度为100%的情况下,加工时间最短,但隐形牙套的脱模边界粗糙且有毛刺。如图15所示,在机器人运行速度为50%时,脱模边界光滑,牙套边界无毛刺。如图16所示,人工切割路径只能沿直线切割,后期需要修形得到牙龈轮廓。相对于人工切割,基于牙龈线数据的自动化切割能直接得到符合患者牙龈轮廓的牙套,并且在运行速度为50%时,隐形牙套的加工质量较好,而采用人工切割方式的切割质量不稳定。如表2所示,以机器人运行速度为50%为例,隐形牙套的自动化加工比人工加工提升效率约50%。同时,自动化切割能得到近似牙龈轮廓的牙套形状,提升了用户的牙套佩戴体验。
5 结论(Conclusion)
针对隐形牙套的加工效率低、工艺烦琐等问题,本文提出了一套从获取数据到指导加工的隐形牙套自动化加工方法,得出的结论如下。
(1)文中提出了一种基于图形分割的特征区域细化方法,结合曲率特征实现了自动提取牙龈线数据。针对牙龈线数据设计了修正方法,提升了牙龈线提取方法应用的稳定性。
(2)基于Qt开发平台设计了牙龈线可视化界面并编写了牙龈线提取程序。利用不同类型的牙齿模型在该程序中进行提取实验,验证了牙龈线提取方法的可行性。
(3)将程序提取的牙龈线数据用于隐形牙套切割实验,实现了隐形牙套的自动化切割工艺流程。相对于人工切割,在保证切割质量的前提下,本文所提方法提升效率约为50%,为后续探究工艺参数对切割质量的影响提供了理论及实践基础。
作者简介:
江小辉(1986-),男,博士,教授.研究领域:高性能制造工艺与装备.
黎万波(1998-),男,硕士生.研究领域:智能制造技术.
吴重军(1988-),男,博士,副教授.研究领域:智能装备优化设计.
刘杰(1989-),男,硕士,工程师.研究领域:3D打印技术.