基于方格网状等离子体激励器的翼型湍流减阻实验
2023-05-06方子淇宗豪华付正阳干宗耀曹亚威
方子淇, 宗豪华, 苏 志, 付正阳, 干宗耀, 曹亚威
(1.西安交通大学航天航空学院,西安,710049;2.西安交通大学机械工程学院,西安,710049;3.空军工程大学航空工程学院,西安,710038)
随着科技发展,飞机飞行速度越来越快,航程也越来越远。飞机飞行阻力与其飞行速度成正比,速度越快的飞机所受到的阻力越大,因此增大了对能源的消耗。研究表明,若一架波音737民航客机减小1%的阻力,每年即可节约15 000加仑的航空燃油消耗[1]。大型运输机和大展弦比无人机在巡航飞行阶段,摩擦阻力占总阻力的比重也超过50%。因此,降低摩擦阻力尤其是湍流摩擦阻力可以提高飞机的巡航升阻比,进而降低发动机油耗、提高飞机航程和航时、节约能源消耗,助力“碳达峰”“碳中和”目标的实现,具有重要意义。
边界层流动减阻控制技术主要分为被动控制和主动控制两种方式。典型流动控制手段有小肋[2]、沟槽[3]、微吹气阵列和等离子体气动激励等。等离子体气动激励作为一种新型主动流动控制技术,与另外几种方式相比,具有结构简单、响应迅速、频带宽等优点,因而成为当前的研究热点[4-5]。
Malik等人最先使用直流电晕放电对平板边界层进行操纵,并于30 m/s的来流风速下实现20%的减阻,并指出进行多次放电来获得更高的效率是有必要[6]。而介质阻挡放电(dielectric barrier discharge, DBD)等离子体激励器很好的迎合了这项要求。近些年也有许多团队做了有关等离子体激励在湍流减阻方面的工作。例如:英国诺丁汉大学Choi等人设计了两组相对的不对称等离子体激励器,在来流速度为1.8 m/s的条件下,通过交替的极性脉冲信号激活激励器上的高压电极,使得等离子体诱导的气体产生交替的运动,从而在近壁面处产生振荡,削弱近壁事件,使湍流边界层的摩擦阻力最大可降低45%[7-8]。美国圣母大学Corke团队发现减阻效果很大程度上取决于高压电极之间的间距,即更密集的电极布置可以产生更好的减阻效果,由此超密间距阵列式的等离子体激励器是值得研究的[9]。西北工业大学WU B等人将双向DBD等离子体激励器沿展向布置于平板上,施加正弦交流电信号,分别产生与流向相同和相反的等离子体射流,结果向后产生射流的减阻效果略优于向前,在来流为14.1 m/s的条件下可达8.78%[10]。后其团队最新发表的成果研究了不同激励频率下展向射流对湍流边界层的减阻控制效果,在来流为10.7 m/s的风速下,得到局部减阻率随着频率的增加而先增大后减小的趋势,最大可达7.4%,表明激励频率对湍流边界层减阻效果有重要影响[11]。
尽管许多研究都取得了很好的结果,但其中大部分是在平板湍流边界层中以小于15 m/s 的来流速度下进行的。想要进一步提升湍流减阻效果,必须摆脱传统展向或流向等离子体射流的思维范式,另谋新路。利用微吹气对湍流边界层进行减阻是由美国NASA的Hwang等首次提出的[12],通过壁面上的微小气孔喷出少量气体来实现减阻,能够以极小的吹气速度与流量在较高来流速度下实现的有效减阻,局部摩擦减阻率可达50%~70%[13],其通过减小局部流向速度,进而实现减阻。除在平板湍流边界层中的应用外,日本庆应义塾大学ETO K等将微吹气方法应用到Clark-Y翼型上,在58 m/s的来流速度下实现了20%~40%的局部摩擦减阻,但翼型总阻力略有增加,且存在供气系统复杂供气系统复杂、多孔介质难以维护等问题[14]。同时,为了推动在航空工程中的实际应用,需要在翼型案例中验证压力梯度对等离子激励器在减阻方面的影响。LI Y Q等在NACA0012翼型表面上布置双侧对冲式激励器,并在Ma=0.3~0.5范围内进行流动控制[15],这是等离子体湍流减阻方法在翼型上的首次尝试,但遗憾的是并未取得减阻效果。
受以上研究工作启发,本研究设计了一种新型方格网状等离子体激励器,其初衷在于通过创造一个个由网格四周向中心对冲的等离子体壁面法向射流,来模拟壁面微吹气阵列的作用效果。本文的组织架构如下:首先,研究了激励器的电特性,并通过高速粒子图像测速仪(particle image velocimetry, PIV)对诱导流场特性进行诊断。在此基础上,将激励器布置在零度攻角的NACA0012 翼型上,使用尾耙测量来获得减阻幅度随激励强度的基本趋势。最后,对减阻机理进行简要分析,得出本文的结论。
1 实验装置
1.1 方格网状激励器与电源
本文设计的一种新型方格网状激励器,其诱导产生的近壁射流可实现类似微吹气的效果。如图1所示,激励器总宽度为100 mm,总长度为300 mm,高压电极宽度d=1 mm,低压电极宽度分别为L1=5 mm和L2=10 mm,与厚度为180 μm的聚酰亚胺介质层组成不同间距和不同个数的方格网状5×5构型与方格网状10×10构型。

图1 方格网状激励器及实验模型示意图
电源采用CTP-2000K毫秒脉冲等离子体电源,输出波形为AC正弦波,输出电压0到30 kV连续可调,占空比1%到99%可调,脉冲频率10到1 kHz连续可调,并将其放电频率设置为6.6 kHz。
1.2 风洞和翼型
实验采用空军工程大学低速回流风洞进行实验测量。该风洞为一座闭口回流式风洞,实验段长3 m、宽1.2 m、高1 m。其主要部件分为动力段、扩压段和过渡段、拐角和导流片、稳定段、收缩段和实验段。动力段采用YTP355M1-6变频调速电机,其功率为160 kW,转速最高可达到986 r/min,在实验段产生来流速度(u∞)5~75 m/s可调,在实验来流速度范围内,实验段主流区湍流度 ≤ 0.2%。
如图1所示,将等离子体激励器沿流向布置于材料为光敏树脂的NACA0012翼型上,翼型弦长c=400 mm,展长l=440 mm。为了着眼于湍流减阻,在距机翼前缘2 cm处布置宽度为1 cm、由30目砂纸制成的直条形转捩带,强制进行转捩。翼型沿流向垂直布置于平板模型中部,平板模型水平安装至风洞实验段中间高度处,其上表面距离风洞上壁面0.46 m离风洞下壁面0.5 m。
1.3 测量系统
1.3.1 激励特性测量系统
方格网状激励器激励后的放电电压与电流分别通过高压探头(Tektronix, P6015A)和电流探头(Tektronix, P6022)配合示波器(Tektronix, MDO3014)进行采集与记录。
高速PIV测量系统由高速相机(Phantom-V2512,1280×800像素),高频率激光器(TABOR-D30)和可编程定时单元(LaVision,PTU9)组成。PIV采集和放电之间的时间精确同步由数字延迟脉冲发生器(DG645)实现,其输出两路信号:一路用于调节电源产生的非稳态正弦电压波形;另一路向PIV发送触发信号。示踪粒子由带 Laskin 喷嘴的雾化器产生,典型粒径约为1~2 μm。测量平面选定为图1所示的xOz平面,对于方格网状5×5构型,视场范围为36.04 mm ×22.56 mm,分辨率为35.46 pixel/mm。对于方格网状10×10构型,视场范围为52.53 mm×32.9 mm,分辨率为24.41 pixel/mm。每个测试案例,由Davis10.2 采集到 1 500 对图像,并将对应的瞬时速度取平均以获得平均射流速度场。
1.3.2 尾迹测量系统
当翼型处于零度攻角状态时,其表面不会发生流动分离现象,因此总翼型阻力主要由摩擦阻力决定,湍流摩擦减阻可直接表现为总的减阻量,并可以通过尾耙进行诊断。如图1所示,尾耙放置于翼型后缘下游的一个弦长处,在大约100 mm的翼展范围内测量尾流速度。直径为1 mm的总压探头以6 mm的间距排列,每个探头连接一个差压传感器(HSTL-FYDX01,量程1 kPa,测量精度0.1%)。传感器的输出电压由数据采集卡(NI USB 6211)读取,后发送到 Labview 程序以计算总阻力系数(Cd)[16]:

(1)
(2)
式中:Fd为翼型总阻力;ρ= 1.226 kg/m3为空气密度;u∞为来流速度;u(y)为尾迹速度;y1与y2分别为尾迹的上下边界。根据测量误差传播规律,在来流速度为 20 m/s 时,由压力测量不确定性引起的尾流速度相对测量误差估计为 0.54%。
2 实验结果
2.1 电特性
放电电压峰峰值Up-p=4 kV、脉冲频率f=100 Hz、占空比50%时调制处理后的电压电流波形如图2所示。图中可见许多于放电过程中由微放电产生的电流尖峰,与文献[17]结果一致。实验中采用的放电参数如表1所示。

图2 调制处理电压电流波形

表1 实验中的放电参数
2.2 发光特性
不同放电电压下方格网状10×10构型的放电效果如图3所示。图像于1/13 s的曝光时间下拍摄,由于单组激励器电极尺度较小,微放电的电流细丝难以观察。电压较小时(Up-p= 6 kV),等离子体延伸长度约为1.85 mm,并且放电亮度较暗;随着电压的增大(Up-p= 7 kV),放电面积稍有增加,在放电区域内出现较为明显的小亮条;当电压到Up-p= 8 kV时,放电面积进一步增大,放电亮度较亮,小亮条相比之前更为明显,与其他放电区域形成鲜明的对比,放电同时有高频的空气击穿声。分析可知,放电区域和亮度是放电强度(激励强度)的体现,故Up-p越大,等离子体激励强度越大。

图3 不同电压下放电发光特性
2.3 诱导流场特性
2.3.1 脉冲频率的影响
为探究脉冲频率对方格网状激励器诱导流场特性的影响,通过对放电电压波形进行调制处理,保持Up-p=8 kV,占空比50%,得到不同脉冲频率下放电诱导速度场演化如图4所示,根据不同脉冲频率的放电时间,将一个放电周期(1/f)划分为4个相位(φ=0.25π,0.5π,0.75π,π)。

图4 不同脉冲频率下的速度场演化(Up-p = 8 kV,占空比50%)
f=20 Hz时,从图中可以更好地观察到射流产生的过程,φ=0.25π时低压电极左右两侧各自产生了沿x和-x方向的沿面射流,由于启动涡的存在,射流头部向上弯曲,二者在中间x=0 mm处碰撞;随后φ=0.5π时,二者相互融合产生法向射流,瞬时最高速度为2.84 m/s,射流覆盖范围延伸长度约为15 mm;在该频率下,激励形成的射流具有整体结构明显、流场结构消散快等特点。
当f=50 Hz时,放电诱导的射流和启动涡的演化过程与f=20 Hz时基本相同。但由于此时激励时间变短,射流传播时间缩短,射流覆盖范围显著减小,φ=π时射流仅能延伸至z=10 mm。但在φ=0.25π时,射流最高速度为3.02 m/s,同时可以观察到两沿面射流还未融合前的形态。该频率下,激励形成的射流具有结构较小、流场结构消散较慢等特点。
当f增大至100 Hz时,激励器在极短时间内为流场注入能量,射流最高速度为2.23 m/s。整体流场演化出较为明显的结构,由于此时射流发展时间极短,射流消散的速度较低频情况更慢,同时由于频率的增大,在下一次射流发展开始前,用于射流耗散的时间也更短。因此,各个周期诱导的合成射流均近似持续存在,此时的放电诱导流动结构类似于未对电压进行调制处理的结果。
综上所述,在当前状态下,整体诱导射流结构随着脉冲频率的增大趋于稳定,且射流消散速度变慢,但诱导射流最大速度并非随着脉冲频率单调增大。
2.3.2 占空比的影响
通过对放电电压波形进行调制处理,保持Up-p=8 kV,f=100 Hz,对不同占空比下发展稳定后的平均流场进行研究,如图5所示。可见,随着占空比的增大,激励作用的时间越长,诱导产生的射流强度越高,从0.57 m/s(占空比10%)增大到1.01 m/s(占空比30%)再到1.02 m/s(占空比50%)最终达到1.1 m/s(占空比70%)。

图5 不同占空比下平均诱导速度场(Up-p = 8 kV,f=100 Hz)
2.3.3 间距的影响
对于方格网状5×5构型和方格网状10×10构型中的单个方格激励器来说,不同点就是低压电极的长度,故改变构型可近似作为改变间距。将Up-p均调整为 6 kV,不对电压波形做调制处理,结果如图6所示。可以看到,同样电参数下间距大的没有间距小的诱导流场强度高,10×10构型最大0.6 m/s,5×5构型最大0.94 m/s,但前者的产生射流延伸范围更广。造成这种射流覆盖范围和速度差异的原因推测如下:对于小间距激励器,每个网格内部相对高压电极所诱导的体积力在流向范围上存在重叠部分,促使射流速度得以加快;增大间距后,射流对冲效应减弱、垂直方向速度降低,但射流可以充分发展和延伸,因此覆盖范围更大。相比之下,在提高诱导射流速度上,小间距构型显得更有潜力。
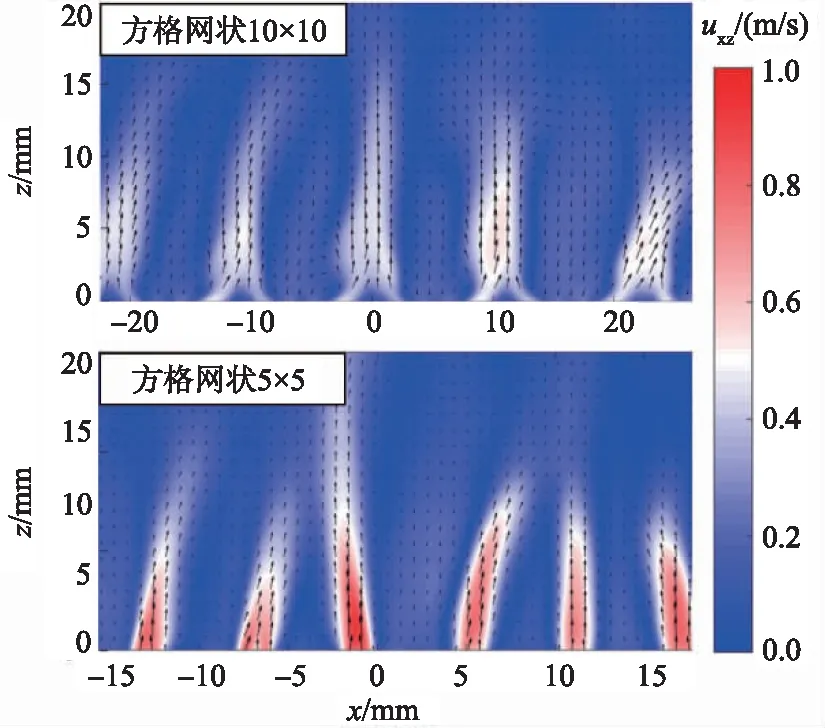
图6 不同间距下平均诱导速度场(Up-p = 6 kV)
此外,需要说明的是,由于等离子体激励诱导的是零质量流量射流,不可避免的会在射流结构周围有垂直向下的流动。方格网状激励器由许多阵列式的小方格激励器构成,因此,单一的射流在三维演化过程中会受到周围激励器诱导涡下洗侧的影响,极易诱发剪切层不稳定性,导致射流并不是严格意义上沿着垂直方向。相比之下,方格网状5×5构型的间距相比方格网状10×10的小,故受到影响更大,射流方向偏移更多些。
2.4 翼型减阻风洞实验
采用在前文中激励特性较为典型的工作模式,研究不同激励强度对方格网状10×10构型的影响规律。选择来流速度为15 m/s,保持电压峰值Up-p=8 kV,改变相应的脉冲频率(10~200 Hz)与占空比(5%~100%),探究最佳减阻效果。
基于尾迹计算翼型总阻力,并采用式(3)计算阻力系数变化:
(3)
式中:Cd,baseline与Cd,plasma分别代表基准与激励状态下的阻力系数,将结果数据利用MATLAB 进行插值分析绘制出相应减阻率随脉冲频率和占空比变化的云图,如图7所示。
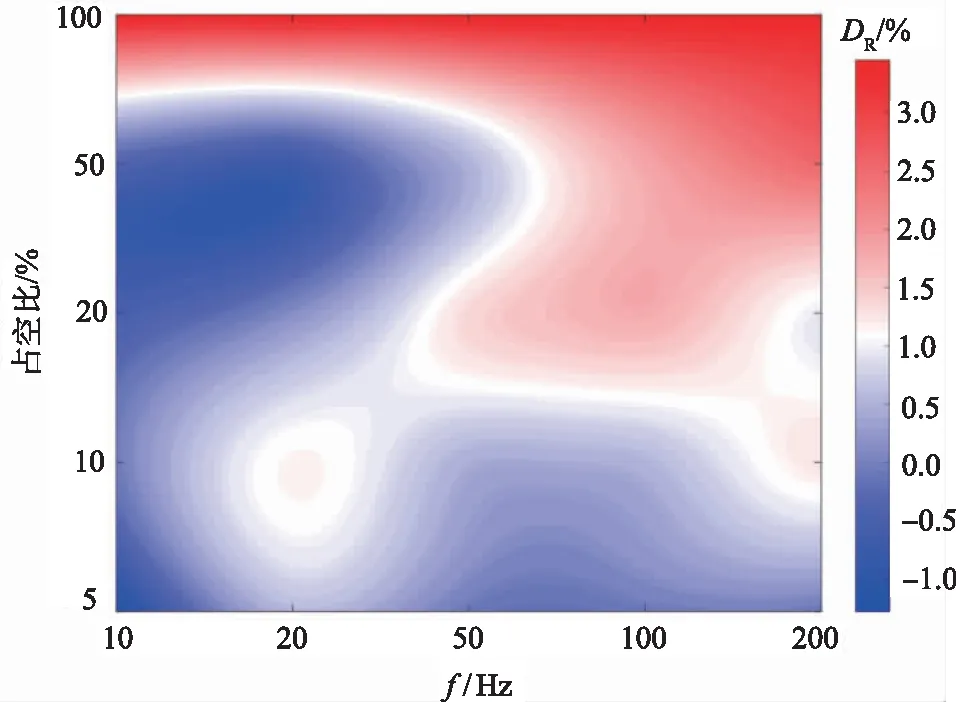
图7 15 m/s减阻效果云图
可见,减阻率在-1.3%~3.5%之间。在占空比100%时,即定常激励,此时激励强度最高,故对流场的产生较强扰动,对应最高的减阻效果。分析云图,该条件下改变占空比与脉冲频率均能对减阻率产生一定影响,但在同一减阻率下可对应着不同的激励参数组合,这说明激励强度对流场扰动程度和减阻效果并不是简单的线性关系。与前文图4的结果相对应,脉冲频率对于减阻率和诱导射流速度的影响并非是越高越好。
2.5 讨论
前文的研究表明,等离子体激励可以实现翼型减阻,结合PIV测试结果,其诱导产生射流可近似看成壁面法向的微吹气,减阻机理存在相似的可能性[18]。文献[19]表明,激励后产生吹气效果使条带结构被抬升,并破坏高速条带,取而代之是使边界层内的能量耗散增加的稳定的小尺度结构,使近壁面出现再层流化现象,进而降低摩擦阻力。文献[20]表明,吹气可以将近壁面的涡结构吹离,减少其与壁面之间的相互作用,并破坏大尺度的涡结构,使其无法沿流向发展成为流向涡,从而减小摩擦阻力。与之相似,激励后的方格网状激励器从宏观层面来看形成了一整块矩形的吹气面,将近壁面的流体结构整体抬升,破坏近壁面涡结构,抑制条纹瞬态增长[21],进而抑制近壁面湍流生成,减小摩擦阻力。
3 结论
本文研究了方格网状激励器的激励特性,后将其应用在翼型上研究其减阻效果,并对减阻机理做出了推测。从激励参数测试结果可知:激励器的激励强度随着电压与占空比的增大而增大,放电现象越明显,平均诱导射流速度越大。而射流随着脉冲频率的增大,结构趋于稳定,且消散速度变慢,但射流速度的变化呈现先增后减的趋势,最高瞬时速度可达3.02 m/s。基于风洞测试结果可知:在来流15 m/s条件下改变激励强度,构建减阻效果云图,结果从增阻变化到减阻(-1.3%~3.5%),且变化关系非线性。通过这些结论,方格网状激励器在翼型减阻的实际应用能力得到了一定的验证,但减阻量还有待提高。激励器激励强度主要受放电电压影响,而方格网状由于激励器组次多,电源供电能力有限,进一步提高激励强度可以考虑选用输出功率更大的驱动电源。但在较高的激励电压下,介质层容易受臭氧等物质侵蚀,最终激励器的工作寿命会大幅衰减。故在增加激励强度的同时还需要对激励器的选材和结构进行进一步的优化,防止快速老化。后续还需依托风洞实验平台,开展更多参数对减阻效果的影响与PIV实验,进一步揭示参数影响规律、摩擦阻力占比、流场结构与减阻机理等问题。
