基于ANSYS的某型号后摇臂拓扑优化设计
2023-05-05晏洋李航许恢兵徐生荣陈朝英李平
晏洋,李航,许恢兵,徐生荣,陈朝英,李平
湖北三环锻造有限公司,湖北襄阳 441700
0 引言
现代汽车对整车的性能要求非常高,包括燃油经济性、舒适性、操纵稳定性等[1]。相关的研究表明,在满足整车安全的前提下,赛车的整备质量每降低1 kg,油耗降低0.06%~0.08%,因此对车的零部件进行轻量化设计具有重要的意义[2]。后摇臂作为悬架系统中的关键承力件,采用传统的结构外型设计往往太过笨重,具有较大的安全裕量,无法将材料的性能充分发挥。采用轻量化设计的方法,能够在满足设计要求的同时得到更好的优化结构。
拓扑优化作为一个常用的结构优化方法,随着其技术的快速发展,通过有限元方法进行拓扑优化已经成为轻量化设计的主流。孙瑞晨等[3]采用基于ANSYS的拓扑优化设计模块对膨胀节万向环进行轻量化设计,优化后万向环的质量降低了26.6%,优化后的结构满足设计要求。孔德颖等[4]采用ANSYS拓扑优化设计模块对某型号车架结构进行轻量化设计,在满足整车振动频率、强度、刚度等约束的前提下,得到的最终车架质量相较于原始车架减轻了3.8 kg,减重幅度达到12.0%,且各项性能指标均有大幅度提升,取得了良好的轻量化效果。逯彦红等[5]采用拓扑优化方法对某型号涡旋压缩机机架进行轻量化设计,优化后的机架整体最大应力满足设计要求,支撑动旋的滑动轴承面最大轴向位移值在允许的范围内。机架质量由原来的10.4 kg减轻到9.4 kg,减重幅度达到9.8%,达到优化目标结果。Elelwi等[6]利用有限元方法对锥形机翼的变形可变跨度机翼组件进行拓扑优化,固定和移动翼段的结构质量分别减少了16.3 kg和10.3 kg。对优化后的机翼组件使用不同的机械参数进行测试,结果显示优化后的可变跨度机翼具有最佳的机械行为和机翼结构的完整性以实现多种飞行任务。Chen等[7]基于ANSYS静力学分析,得到了矿车转向块在拉力作用下的总变形和应力。根据边界条件对转向块进行了拓扑优化,并根据拓扑优化的结果对转向块进行了优化,最后通过有限元分析进行验证。结果表明,优化后的转向块质量减少了11.7%,结构满足正常工作的强度和刚度要求。Topaç等[8]通过评估重型商用车后桥连接支架初始设计的强度和变形,确定分析结果中应力分布的关键区域,对其进行拓扑优化,改进结构模型,结果表明优化后的连接支架的质量减少了63.0%。Yin等[9]采用有限元分析方法对链式提升机的横梁和杠杆得到了应力变形云图,然后根据静力学分析结果进行了拓扑优化,并利用有限元法对结果进行验证。优化结果显示优化后的横梁和杠杆构件比优化前的质量分别减少了20.0%和26.0%。由于优化横梁和杠杆的应力分别明显增加了36.0%和47.0%,结果在可接受的范围内。
目前对于赛车后摇臂的拓扑优化研究还比较少,本文以某型号后摇臂为研究对象,将轻量化设计的理念引入到后摇臂的结构设计中,在保证结构强度及刚度要求的前提下,尽可能地减少构件的整体质量,降低材料成本。对后摇臂模型进行有限元静力学分析确定后摇臂能够优化的区域,然后进行拓扑优化设计得到优化模型,再对优化后的模型进行有限元验证,判断拓扑优化设计结果是否正确,最终得到轻量化设计目标。
1 后摇臂有限元模型的建立与分析
1.1 有限元模型的建立
采用Solid Works软件建立某型号后摇臂的三维模型,如图1所示。
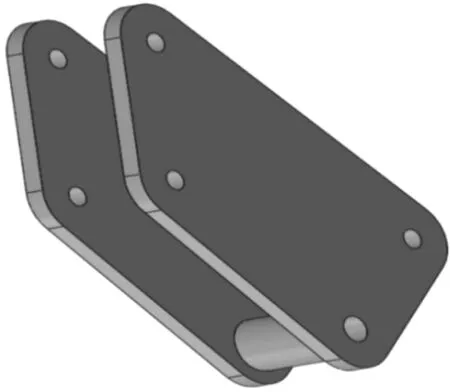
图1 某型号后摇臂的三维模型
使用ANSYS Workbench平台中的静力学分析模块对某型号后摇臂模型进行有限元分析,采用六面体网格划分,经多次划分并验证网格无关性后,某型号后摇臂的几何模型转变为具有物理属性的有限元模型,共划分成20 398个单元和104 981个节点,得到的有限元模型如图2所示。后摇臂的材料属性见表1。

图2 某型号后摇臂的有限元模型
1.2 静力学分析
1.3 静力学分析结果
经过静力分析求解计算,得到后摇臂在相应工况下的应力云图及变形云图,如图4和图5所示。

图4 后摇臂的应力云图

图5 后摇臂的变形云图
由图4可以看出,后摇臂在其枢轴上出现最大应力,最大等效应力值为69.586 MPa,此为应力集中现象,其他部位的等效应力值都比较低,普遍在40 MPa以下。由图5可以看出,后摇臂最大形变量在与第三弹簧连接孔周围处,最大形变量为0.638 mm,形变量在合理的变化范围内。由静力学分析结果表明,后摇臂的强度和刚度在满足设计要求的情况下有较大的轻量化优化空间,从后摇臂整体结构的应力和变形分布情况来看,对后摇臂进行整体的结构优化有很大的可行性。
2 后摇臂结构的拓扑优化
2.1 拓扑优化的基本理论
拓扑优化作为结构优化方法具有很好的工程应用前景,拓扑优化方法是根据构件的载荷情况、边界条件和性能指标,在给定的优化区域内对材料分布进行优化设计的数学方法[8]。拓扑优化方法是由离散体到连续体发展而来的,对于连续体结构的拓扑优化方法有很多,包括变密度法、均匀化法、水平集法等,其中变密度法程序实现简单、计算效率高,在拓扑优化设计中最常用。变密度法的基本思想是:以连续变量的密度函数形式显式地表达单元相对密度与材料弹性模量之间的对应关系,这种方法基于各向同性材料,不需要引入微结构和附加的均匀化过程,它以每个单元的相对密度作为设计变量,人为假定相对密度和材料弹性模量之间的某种对应关系,通过有限单元法对连续体结构进行离散化处理,在设计空间内建立一个由有限个梁单元组成的基结构,然后根据算法确定设计空间内单元的去留,保留下来的单元即构成最终的拓扑方案,从而实现拓扑优化[9]。
变密度法优化目标以最大轻量化为目标函数。约束条件包括:满足优化后体积要小于整个设计域的初始体积,满足静力平衡方程,满足设计变量的范围为0~1。拓扑优化的数学模型表达式[10]为:
(1)
式中:F为力向量;U为位移向量;K为结构总刚度矩阵;V*为整个设计域的初始体积;V为结构优化后的结构体积;ρ为设计变量;ρe为单元设计变量;ρmin为单元设计变量最小极限值;ρmax为单元设计变量最大极限值;p为惩罚因子;n为结构离散单元总数。
联合目标函数和预设约束条件得到拉格朗日方程,将约束条件与目标函数结合继而转换为零约束问题,采用拉格朗日乘子法构建优化函数[11]:
(2)
式中:λ、λ1、λ2、λ3为拉格朗日乘子,λ为标量,λ1、λ2、λ3为矢量;i为子域内第i个单元;n为单元数目。
由Kuhn-Tucker(K-T)[12]条件建立优化迭代式:
穿好干净衣物,觉得浑身轻了五百斤,但口渴得厉害,她勉强灌了几口茶缸水,留个底,把沙枣花插在里面,花苞和叶子蔫头耷脑的样子,让田志芳心疼。内衣简单在洗澡水里浆过,算洗了。长衣长裤水不够用就扔在一边。把铺盖摆放好,人软绵绵地倒在土台上,眼皮子一闭就睡着了。
(3)


(4)
式中:t为平移限度;η为阻尼系数。
其中平移限度t和阻尼系数η是用来控制迭代稳定及快速收敛。
2.2 拓扑优化分析
为了提高后摇臂整体的静力学性能,同时可以有效降低自身质量,因此对原有后摇臂进行整体拓扑优化,并依据拓扑优化结果对后摇臂进行结构改进。由于不能够改变后摇臂的4个安装孔的位置,故本文选择后摇臂的优化区域为除去4个安装孔及外形边的后摇臂内部区域。
本文使用的拓扑优化软件是ANSYS Workbench平台下的拓扑优化设计模块,拓扑优化设计模块可以通过给定的载荷情况和边界条件,在满足最小柔度即刚度最大化的设计要求情况下实现质量最小化。以拓扑优化计算得到的初步优化模型为参考,由于初步优化模型为不规则的几何体,需要对初步优化模型进行设计改进,以达到最优化设计结果。然后将最优化设计模型再次进行有限元分析计算,查看计算结果是否满足设计要求,以此验证设计可靠性。
将静力学分析结果导入拓扑优化设计模块,设置后摇臂的4个安装孔及外形边为排除区域,其余部分设置为优化区域,响应约束设置为质量保留百分比为50%,优化算法选择优化准则法(OC),收敛容限定义为0.000 1,拓扑优化结果如图6所示。

图6 后摇臂拓扑优化结果
在得到拓扑优化的结果后,以拓扑优化原始模型为参考,对该优化模型进行设计改进,得到的优化设计方案如图7所示。
2.3 拓扑优化的有限元验证
将优化后的模型导入到有限元静力学分析模块中,计算得到的后摇臂优化后的应力云图和变形云图分别如图8和图9所示。
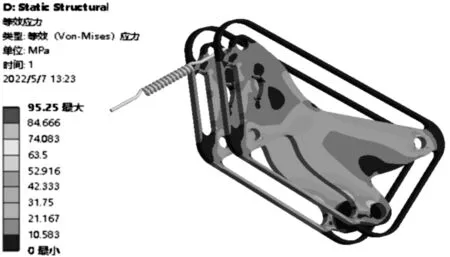
图8 后摇臂优化后的应力云图
通过对经拓扑优化后改进的后摇臂模型进行有限元分析计算验证,得到的分析结果表明:优化前后的最大等效应力值均出现在后摇臂枢轴处位置,此为应力集中现象,优化前最大等效应力值为69.586 MPa,优化后最大等效应力值为95.250 MPa,其他部分位置的等效应力值分布情况与优化前大致相似,都在40 MPa以下,整个构件受到的等效应力情况在材料允许的许用应力范围内。优化前后的最大变形量均出现在后摇臂与第三弹簧连接孔周围处,优化前最大变形量为0.638 mm,优化后最大变形量为0.637 mm,整个构件的变形量在合理的范围内。通过对比拓扑优化前后后摇臂的有限元分析结果可知,优化后的后摇臂模型既能够满足结构的强度和刚度要求,又能够满足设计要求,故拓扑优化的结果是可靠的,对后摇臂的轻量化设计起到了显著的效果。
本文以有限元分析为基础的前提下,结合拓扑优化设计方法得到某型号后摇臂的优化模型,后摇臂优化前后设计结果对比见表2。由表可以看出,在满足设计要求的前提下,某型号后摇臂的拓扑优化设计减材结果为41.075%,拓扑优化减材效果显著。

表2 后摇臂优化前后设计结果对比
3 结论
本文通过采用拓扑优化方法对某型号后摇臂进行轻量化设计,针对后摇臂的拓扑优化设计可以得到以下结论:
(1)由静力学分析发现后摇臂具有一定的轻量化设计空间。后摇臂除在枢轴孔、推杆连接孔及减震器连接孔邻近范围内的应力较大外,其余部分应力和变形均较小。
(2)采用ANSYS拓扑优化模块,以轻量化设计为优化目标,对后摇臂进行拓扑优化,得到优化后的后摇臂模型减重41.075%。对优化后的后摇臂模型进行有限元验证,结果表明:优化后的后摇臂在强度和刚度性能上能够满足设计要求。
