水下热滑翔机垂直面运动的俯仰角自寻最优自抗扰控制
2023-05-05徐海峰曹新宇黄志坚
徐海峰,杨 光,曹新宇,黄志坚
(1.中国船级社镇江办事处, 江苏 镇江 212002;2.上海海事大学, 上海 201306)
0 引 言
水下热滑翔机是一种高效、浮力驱动的带翼自主水下航行器(AUV)。它将海洋温差能转化为推进动力,在海洋测量和军事探测中具有重要价值。热滑翔机的核心部件是热管,其中包含相变材料的工作流体。然而,水下热滑翔机自身的运动速度较慢,高度依赖于其运动环境。因此,在面对复杂的海洋环境时,要考虑其鲁棒性、节约能源和改善动态性能。此外,热滑翔机动力学具有多变量、非线性和耦合特性。这些因素都对其运动控制系统的设计提出了巨大的挑战[1]。
目前,许多水下热滑翔机仍然采用简单或改进的PID 控制来保持其姿态[2],但该方法缺乏适应性、非线性和智能化。因神经网络具有良好的非线性特性,基于神经网络的自适应控制方法被应用于很多场合,例如AUV 的非线性多输入多输出运动控制[3]。滑模控制(SMC)实质上也是一种特殊的非线性控制方法,其非线性表现为控制的不连续,“滑模”的设计可以不受对象参数或干扰的影响。由于这一优点,SMC 也被广泛应用于滑翔机的运动控制中[4]。反步方法不需要复杂的坐标变换,因此,反步自适应控制也被广泛应用于滑翔机的运动控制中[5],并且反步法在不确定扰动下具有良好的自适应性和鲁棒性。研究人员还采用综合各种方法优点的综合控制方法,如,Zool 等[6]提出了一种基于SMC 和鲁棒动态区域的AUV 鲁棒控制方案;Rout 等[7]利用移动平均外生模型、扩展递归最小二乘算法和视线导引律开发了一种约束自校正控制器,用于AUV 的航向和潜水运动控制;桑宏强等[8]提出了一种包含积分视向导航(ILOS)、基于航向补偿(HC)的滑模控制(SMC)及粒子滤波(PF)的路径跟踪控制方法;陈弈煿等[9]提出了基于RBF 神经网络的参数自整定PID 控制方法。这些方法在各自的领域也都达到了对预期目标的控制效果。
然而,上述许多方法都只考虑控制效果,却在实现控制效果的过程中,未考虑用最小化使控制能耗得到优化。因此,Santhakumar 等[10]通过修改比目鱼型水下机器人的推进器配置,开发了一种节能的动态站保持控制系统;Sarkar 等[11]利用一种基于SMC 和欧拉-拉格朗日的经典优化方法解决了能量和控制精度问题;Townsend[12]提出了一种基于陀螺能量原型原理的自供电AUV。但对控制和能量之间的权衡问题探讨尚不多见,需要进一步研究。
因此,为进一步优化水下热滑翔机的控制和能量效率,本文提出一种垂直平面运动俯仰角控制的自寻最优自抗扰控制方法。首先,给出热滑翔机的工作和控制原理,定义热滑翔机的坐标系和变量。在此基础上,建立用于性能试验的数学运动模型。其次,给出基于跟踪微分器(TD)的最小搜索方法和ADRC 方法,以此提出自寻最优自抗扰控制方法。该方法可以通过预调整其参考值补偿外部干扰,从而优化所需的控制信号。最后,将该方法用于滑翔机-23°下潜和+23°上浮过程中的俯仰保持控制,以及滑翔机-23°下潜和+23°上浮过程中的姿态转换控制。
1 热滑翔机工作和控制原理
1.1 海洋温差能发动机
水下热滑翔机的推进系统为海洋温差能发动机,如图1(a)所示。在温暖的海面和寒冷的深海之间收集海洋温差能,并直接将其转化为机械能驱动热滑翔机。图1(b)为Slocum 热滑翔机的外形,工作流体储存在热管里,可以很容易地与周围的海水进行热交换[13]。

图1 在温暖海洋表面的海洋温差能发动机内部结构与外壳示意图Fig.1 Schematic diagram of the internal structure and housing of an ocean temperature differential energy engine on a warm ocean surface
初始条件见图1(a)。热滑翔机漂浮在海洋表面时,与温暖的表层海水处于稳定的热平衡状态。此时外部气囊膨胀,净浮力为正。储液器中为压缩的氮气,热管中的工作流体为纯液体,传输液是乙二醇,工作气体是氮气。
滑翔机下潜时,首先连接三通阀的B-C 侧,由于滑翔机的内部压力略低于大气压力,外部气囊中的传输液流入内部气囊。随着外部气囊体积的减小,净浮力由正变为负,滑翔机开始下潜,三通阀关闭。当周围海水温度逐渐下降时,热管内的工作流体开始释放热量,当海水温度低于相变温度时,工作流体开始凝固和收缩。此时,热管内压力开始下降,单向阀2 打开,热管从内部气囊吸入传输液。
滑翔机上浮时,首先连接三通阀的A-C 侧,在高压氮气的作用下,储液器中的传输液流入外部气囊。随着外部气囊体积的增加,净浮力由负向正变化,滑翔机开始上浮,三通阀关闭。在滑翔机进入温暖的海水之前,工作流体完全凝固,体积最小。当海水温度高于相变温度时,工作流体开始从海水中吸收热量并熔化,体积膨胀。此时,工作流体对传输液产生巨大的压力,使单向阀1 开启。传输液再次被压入储液器,储液器内的氮气也被压缩[13]。
在滑翔机再次下潜到冰冷的海水之前,工作流体被完全融化,体积达到最大,这样就完成了一次热循环。
1.2 热滑翔机的控制原理
热滑翔机的浮力中心可以认为是不变的,在保持整个滑翔机质量几乎不变的情况下,通过浮力调节系统可以使浮力交替地减少和增加。系统通过减少或增加浮力实现滑翔机在海洋中的下潜或上浮运动。
同时,热滑翔机通过内部执行器改变其质量分布。俯仰调节机构通过改变滑翔机的滑动质量在纵向上的分布改变滑翔机重力与浮力中心的相对位置,控制俯仰角。横滚调节机构通过改变质量的水平分布控制横滚角度,其原理与俯仰调节机构相同。如果热滑翔机能够保持稳定的俯仰角,将有助于最大限度地发挥三通浮力定时阀的调节作用。自寻最优自抗扰控制原理如图2 所示。
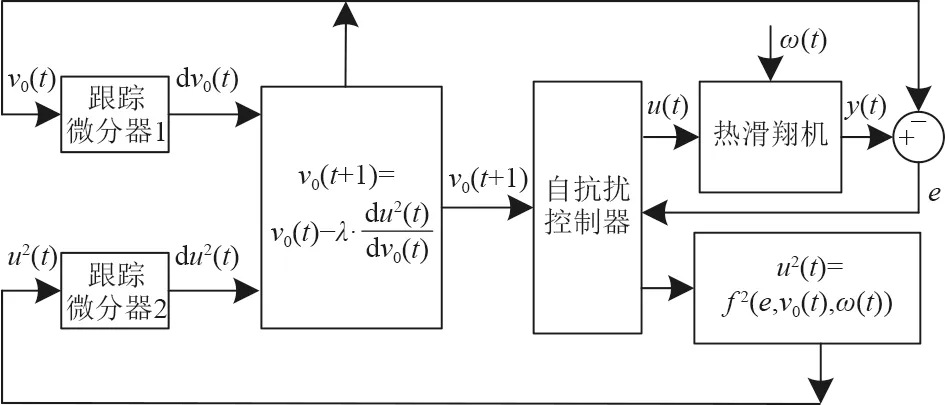
图2 自寻最优自抗扰控制原理图Fig.2 Self-seeking optimal self-anti-disturbance control schematic
在下潜和上浮运动中,热滑翔机能通过姿态调节器使固定翼产生升力,该升力带动滑翔机前进。因此,滑翔机沿着锯齿形的路径滑动。热能滑翔机之所以高效,原因是大部分运动时间内都是在垂直平面内进行稳定的锯齿形滑行。
2 热滑翔机与海洋扰动的数学模型
2.1 热滑翔机的数学模型
Leonard 等已经建立了能够详尽描述水下热滑翔机行为的非线性动力学模型[14]。热滑翔机在大部分运动时间内都是在垂直平面内进行稳定的锯齿形滑行。杨海[15]将热滑翔机垂向平面内非线性运动方程进行了改进,本文直接引用改进后的热滑翔机垂向平面运动模型。
2.2 海洋扰动模拟
本文所引用的方程是热滑翔机在静态海水中的数学模型。事实上,热滑翔机的运动受到洋流、海风等因素的影响。通常,洋流及其速度变化非常缓慢,可以忽略不计。表面的洋流通常比深海的洋流大,而且与该地区的地形特征、季节变化等因素有关。
为了测试所设计的热滑翔机运动控制系统的抗干扰能力,可以添加仿真干扰信号,添加的为连续扰动信号:
干扰信号可以在下潜、上浮和姿态转换模拟过程中加入到俯仰角的输出变量中。
式(1)中的rnd是一个介于0~1 的随机函数。选择这些基础干扰的原因是其对热滑翔机运动有重要影响。由于热滑翔机的姿态转换更难控制,所以在式(1)中选择了一个较低频率的扰动sin(t/20)。
3 最小跟踪微分器和最优自抗扰控制方法
3.1 基于跟踪微分器(TD)的最小搜寻
对于一个非线性输入x(t)(t=h,2h,3h...),跟踪微分器(TD) 可以输出滤波后的原始信号及其对时间的导数,即x˙(t)。因此,跟踪微分器(TD)是一个具有特殊性质的非线性函数,如式(2)~式(3)所示。
其中:x1和x2分别为系统状态及其一阶导数;h为迭代时间步长;fhan为构造的非线性函数;v为系统参考;h0为滤波系数;r为时间标尺;sign是符号函数。
测量偏导方法常用于搜索极值点,其递归算法为:
其中,λ为一个校正参数。如果函数y=f(x)已知,可以很容易得到式(4)中的微分算子。然而,对于热滑翔机这样的未知模型,需要通过跟踪微分器(TD) 获得y(t)和x(t)的导数。修正后的式(4) 用于确定其极值点,如下式:
将热滑翔机的输入信号x和输出信号y分别送入2 个TD,得到热滑翔机的实时微分信号x˙(t) 和y˙(t)。将和代入式(5),通过重复迭代计算得到极值。
3.2 自抗扰控制(ADRC)方法
自抗扰控制理论最早由Han[16]提出,其核心思想是利用跟踪微分器(TD)、扩张状态观测器(ESO)和非线性状态误差反馈(NLSEF),对热滑翔机的内部动力学和外部扰动进行实时估计和补偿。相比PID 控制,自抗扰控制(ADRC)可以提高控制质量和速度。该方法主要包括以下步骤:
步骤1用式(2)~式(3)的TD 为系统参考建立一个瞬态过程。
步骤2用ESO 估计被控对象的系统状态和总扰动:
其中:e为估计状态与系统输出的误差;z1,z2,z3为估计的系统状态和扰动;β01,β02,β03为增益系数;u为控制输入;y为系统输出;fal为构造的非线性函数;δ,α为fal函数的参数。
步骤3建立非线性状态误差反馈(NLSEF)。
其中:e1和e2为估计误差和系统状态误差;u0是补偿前的中间控制信号;c为增益系数。
步骤4计算控制信号扰动补偿其中,b0为控制信号的放大系数,取1;u则是最后的控制信号。
4 水下热滑翔机的自寻优自抗扰控制
4.1 基于TD 和ADRC 的自寻优自抗扰控制方法
结合上述基于TD 的最小搜索和自抗扰控制(AD RC),提出一种自寻优自抗扰控制方法。该方法可以优化控制能量,同时实现对热滑翔机的抗干扰控制,并通过预调整其参考值补偿外部扰动,达到最优控制效果。
该方法将控制变量视为状态误差e、参考值v0(t)和干扰ω(t)的函数,即u(t)=f(e,v0(t),ω(t)),则控制能量可表示为u2(t)=f2(e,v0(t),ω(t))。因此,最优控制能量问题是根据外部干扰搜索合适的参考点并使该函数最小化,这是一个自适应控制过程。
虽然u2(t)=f2(e,v0(t),ω(t))的具体方程未知,但这种函数关系存在。首先,使用基于TD 的最小搜索方法来确定最优v0(t)。然后,采用自抗扰控制(ADRC)方法,使用最优值v0(t)产生控制变量u(t)并抵抗扰动。最后,根据自寻优自抗扰控制方法对控制能量u2(t)进行优化调整。
4.2 在海流和噪声干扰下下潜和上浮过程中的俯仰角保持控制
基于上述方法,对热滑翔机进行仿真试验,评估自寻最优自抗扰控制器在洋流和噪声干扰下,系统对热滑翔机运动控制的性能。被控对象是所引用的热滑翔机模型,该模型在尺寸上类似于Slocum,其参数如表1 所示。
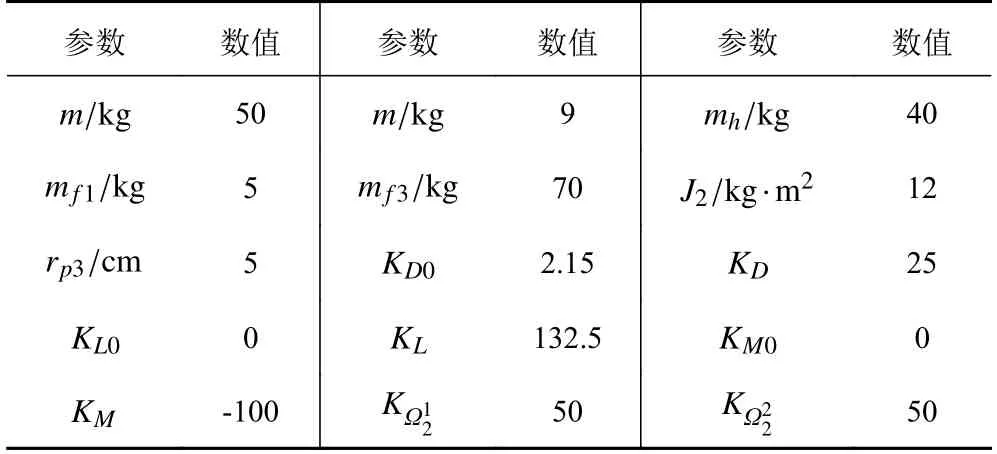
表1 热滑翔机模型的仿真参数Tab.1 Simulation parameters of the thermal glider model
热滑翔机的仿真只需要考虑俯仰角的调整,因为在一个热循环中,浮力的预先设定仅需通过图2 中的三通阀A/B/C 的两次定时操作决定。阀门切换后,浮力在下潜开始时根据式(10)变化,在上浮开始时根据式(11)变化,其过程如图3 所示。
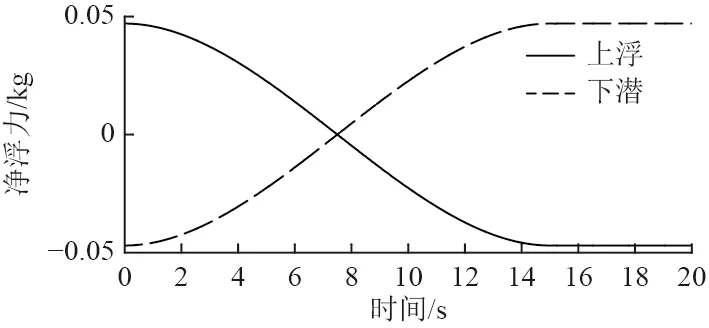
图3 模拟下潜或上浮开始时的净浮力变化Fig.3 Simulating the change in net buoyancy at the start of a dive or surfacing
控制滑翔机中滑动质量的纵向位置。在式(1)的洋流和噪声干扰下,热滑翔机在上浮/下潜过程中应保持+23°/-23°的俯仰角。
以热滑翔机下潜时保持-23°俯仰角为例仿真说明。在初始时刻,热滑翔机的稳态分别为: θ=-23°,Ω2=0(°)/s,v1=0.3 m/s,v3=0.01 m/s,rp1=0.02 m,r˙p1=0 m/s,m0=0.047 kg[15]。自寻优自抗扰控制器参数分别为:β01= 100,β02= 300,β03= 1 000,r0= 20,r= 100,c= 3.0,h0= 0.2,r1=r2=r3= 100,h1=h2=h3= 0.2,λ=0.005 9。
仿真结果如图4~图6 所示。从图4 可以看出,即使在洋流和噪声干扰下,滑翔机也能保持-23°下潜俯仰角。同时,从图5 可以看出,控制信号及其能耗得到了优化,非常小。这是由于通过预调整参考值进行补偿得到的最优控制效果(见图6)。因此,该控制系统具有良好的轨迹保持性能和最优的能量效率。

图4 在自寻最优自抗扰控制、海流和噪声干扰下的下潜俯仰角保持控制效果Fig.4 Effectiveness of dive pitch angle maintenance control under self-seeking optimal self-anti-disturbance control, currents and noise disturbances
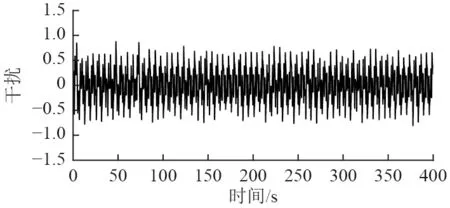
图5 在海流和噪声干扰下保持下潜俯仰角时的自寻最优自抗扰控制输出Fig.5 Self-seeking optimal self-turbulence control output when maintaining dive pitch angle under current and noise disturbances

图6 在海流和噪声干扰下保持下潜俯仰角时的自寻最优自抗扰控制器的修正参考值Fig.6 Corrected reference values for self-seeking optimal self-absorbing controllers for maintaining dive pitch angle under current and noise disturbances
事实上,控制器的控制信号完全依赖于附加扰动。在真实的海洋中,对热滑翔机的扰动比假设的要简单和少得多。因此,控制变量不会剧烈波动,当扰动形式改变或频率降低时,影响应被自动消除。这样做既不会增加能耗,也不会降低机械寿命。
对热滑翔机上浮时保持+23°俯仰角进行仿真,与下潜时的仿真结果非常相似,具有相同的原理。
4.3 在海流和噪声干扰下滑翔机俯仰角下潜与上浮的转换控制
当热滑翔机下潜到预定的海洋深度时,必须从下潜切换到上浮,反之亦然。这也是需要控制滑翔机中滑动质量块的纵向位置。控制系统的输出是在模拟的洋流和噪声干扰下,即式(1)dtb2=sin(t/20)+(rnd-0.5)/5,俯仰角从-23°到+23°或从+23°到-23°的转换。
热滑翔机以-23°下潜的稳态1 参数分别为: θ=-23,Ω2=0(°)/s,v1=0.3 m/s,v3=0.01 m/s,rp1=0.02 m,r˙p1=0 m/s,m0=0.047 kg[15];以 +23°上浮的稳态2 参数分别为:θ=23, Ω2=0(°)/s,v1=0.3 m/s,v3=-0.01 m/s,rp1=-0.02 m ,r˙p1=0 m/s, m0=-0.047 kg[15]。
根据式(12)规划从-23°下潜到+23°上浮所需的俯仰角过渡轨迹。根据式(13)规划俯仰角从+23°到-23°的过渡轨迹如图7 所示。
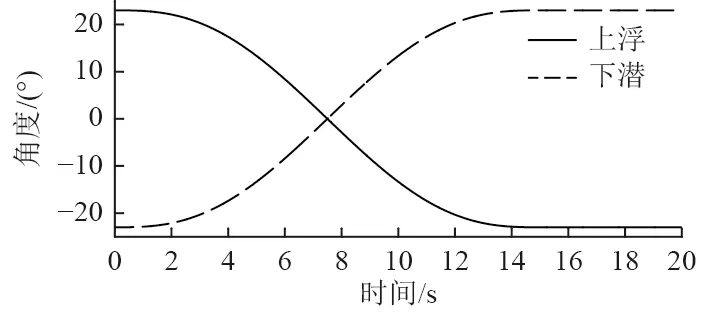
图7 在下潜和上浮转换时的期望俯仰角参考值Fig.7 Desired pitch angle reference values during dive and surfacing transitions
以连续过渡过程为例,测试所提出的自寻最优自抗扰控制器的控制能力。热滑翔机俯仰角由-23°变为+23°,完成后,滑翔机模型立即初始化为稳态2;然后俯仰角由+23°转换为-23°,完成后,滑翔机模型立即初始化为-23°稳态1。之后继续重复这个测试循环。
为实现热滑翔机的在线控制,需要采用不变的控制器参数自适应不同的运动和扰动。使该滑翔机无需在线修改参数,即可获得鲁棒性能。否则,在线调整会使控制器很难使用。
仿真结果如图8~图10 所示。从图8 可以看出,在洋流和噪声干扰下,热滑翔机可以根据图7 中的参考转换轨迹,在2 种平衡状态之间进行连续转换。同时,如图9 所示,控制信号及其能耗得到优化,非常小。这是由于通过预调整参考点进行补偿得到的最优控制效果,如图10 所示。因此,该控制系统也具有良好的轨迹跟踪性能和优化的能量效率。仿真中,由于控制器参数都保持不变,因此,所提出的自寻最优自抗扰控制器也是一种成功的自适应控制方法。
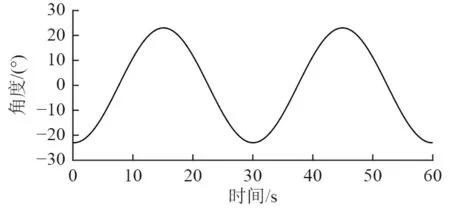
图8 4 次上浮/下潜转换的俯仰角输出Fig.8 Pitch output for four consecutive ascent/descent transitions
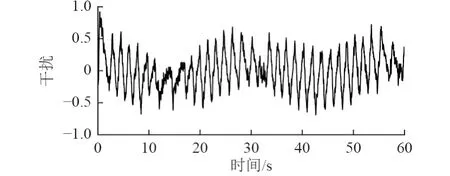
图9 4 次上浮/下潜转换时自寻最优自抗扰控制器输出Fig.9 Self-seeking optimal self-tampering controller output during four consecutive ascent/descent transitions
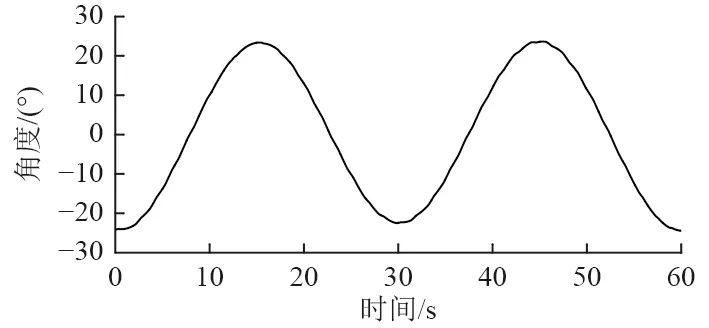
图10 4 次上浮/下潜转换时自寻最优自抗扰控制器参考值修正情况Fig.10 Self-seeking optimal self-turbulence controller reference correction at four successive ascent/descent transitions
与文献[10]和[12]相比,仅仅基于自寻最优自抗扰方法,就能够达到降低能耗的结果,而不需要修改热滑翔机的设计。与参考文献[11]相比,该方法可以用一个更小的控制信号抵抗干扰。该方法优越性在于,最小搜索TD 能够寻找到最佳控制信号,而ADRC 实现了抗扰动控制效果。因此,与仅通过改变控制输出和用ADRC 或PID 调节执行器相比,通过预调整参考值抗扰所消耗的能量要少得多。
5 结 语
本文针对水下热滑翔机在受干扰时垂直面运动中俯仰角控制问题,提出一种自寻最优自抗扰控制方法。
结果表明,该控制系统在模拟洋流和噪声干扰下具有良好的稳态和动态性能。能够抵抗干扰并保持良好的自适应性能。此外,该控制系统还可以在能量方面达到最优效率,控制信号在需要保持-23°下潜或+23°上浮,或跟踪其过渡轨迹时所消耗的能量更小。
由于水下热滑翔机能够携带的能量有限,节省能量意味着增加其续航能力,这对于水下热滑翔机的海洋勘测或军事用途具有重要意义。此外,该方法的控制算法也相对简单。这些优点使它成为一种更好的控制策略。
