激光雷达和单目视觉船舶智能导航系统
2023-05-04韩金霞孙正伟
韩金霞,孙正伟
(1.江苏海事职业技术学院 轮机电气与智能工程学院,江苏 南京 210000;2.嘉悦欣瑞智能科技有限公司,江苏 南京 210000)
0 引 言
船舶航行时,因海洋环境存在较大变动性,还会随时出现未知障碍物,所以,智能导航系统的使用非常重要。智能导航系统的应用性能,对船舶航行的安全性存在直接影响[1-3]。陈立等[4]对智能矿砂船的航行控制问题进行深入研究后,设计了具有针对性应用的导航系统,此系统虽然能保证智能矿砂船按照预期轨迹稳定航行,但对航行环境中的障碍物是否存在避障能力,还需深入测试。庞玺斌等[5]将混合误差模型用在船舶组合导航系统中,以此保证船舶在GPS 故障时,仍可按照导航系统的航迹规划线路,可靠稳定航行至终点。但对航行环境中的障碍物也未深入研究,如果导航系统不能有效为船舶提供安全导航服务,便不能保证船舶的航行安全性[6-7]。为此,本文设计基于激光雷达和单目视觉的船舶智能导航系统,利用此系统为船舶提供定位服务的同时,还为船舶提供障碍物检测和避障航迹规划服务。
1 基于激光雷达和单目视觉的船舶智能导航系统
1.1 系统硬件结构
基于激光雷达和单目视觉的船舶智能导航系统结构如图1 所示。系统主要分为船载子系统、地面监控子系统。船载子系统中,当卫星信号接收机获取卫星信号后,能够实时运算船舶目前的经纬地理信息,障碍物检测单元能够使用单目视觉CCD 传感器、激光雷达,检测船舶周围的障碍物信息和距离信息,然后通过CAN 总线网络,将信息传输到地面监控子系统,系统监控端把获取的信息和电子海图相匹配后,便可将电子海图中对应的位置上标识船舶坐标信息和航行信息,且通过基于激光雷达的障碍目标测距方法完成障碍物测距。监控端能够对船舶下达静止、航行、转向等指令,由CAN 总线网络发送至船载子系统的控制单元,使用船舶航迹控制器完成智能导航。
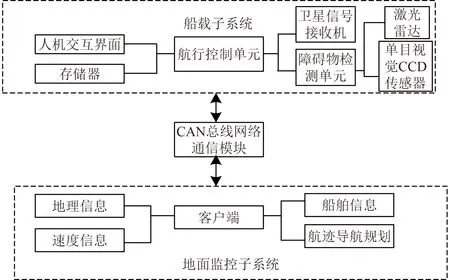
图1 船舶智能导航系统结构图Fig.1 Structure of ship intelligent navigation system
图2 为单目视觉CCD 传感器的结构图。CCD 传感器的有效像素数是640×480 像元,像素大小是7.4 μm×7.4 μm,支持单、双输出通道信号输出,传感器的垂直驱动u2/u1,u2c/u1c和电荷泄放栅GE同时运行,启动开窗功能,完成目标信息感知图像采集。
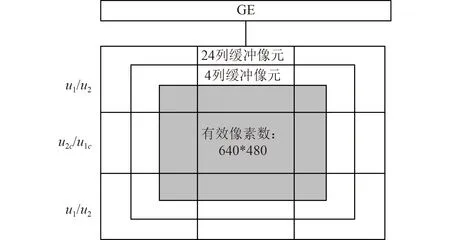
图2 单目视觉CCD 传感器结构图Fig.2 Structure diagram of monocular vision CCD sensor
图3 为激光雷达测距单元结构图。当传感器发现船舶附近存在障碍物时,激光雷达测距单元便会在扫描频率是100 MHz 的条件下,由光学发射端发射激光,返回激光由光子探测器接收后,以回波脉冲的模式,发送至主放大器和前置放大器执行放大,然后主处理器把放大的回波脉冲转换成回波信号,将回波信号执行三角激光测距处理,完成测距。
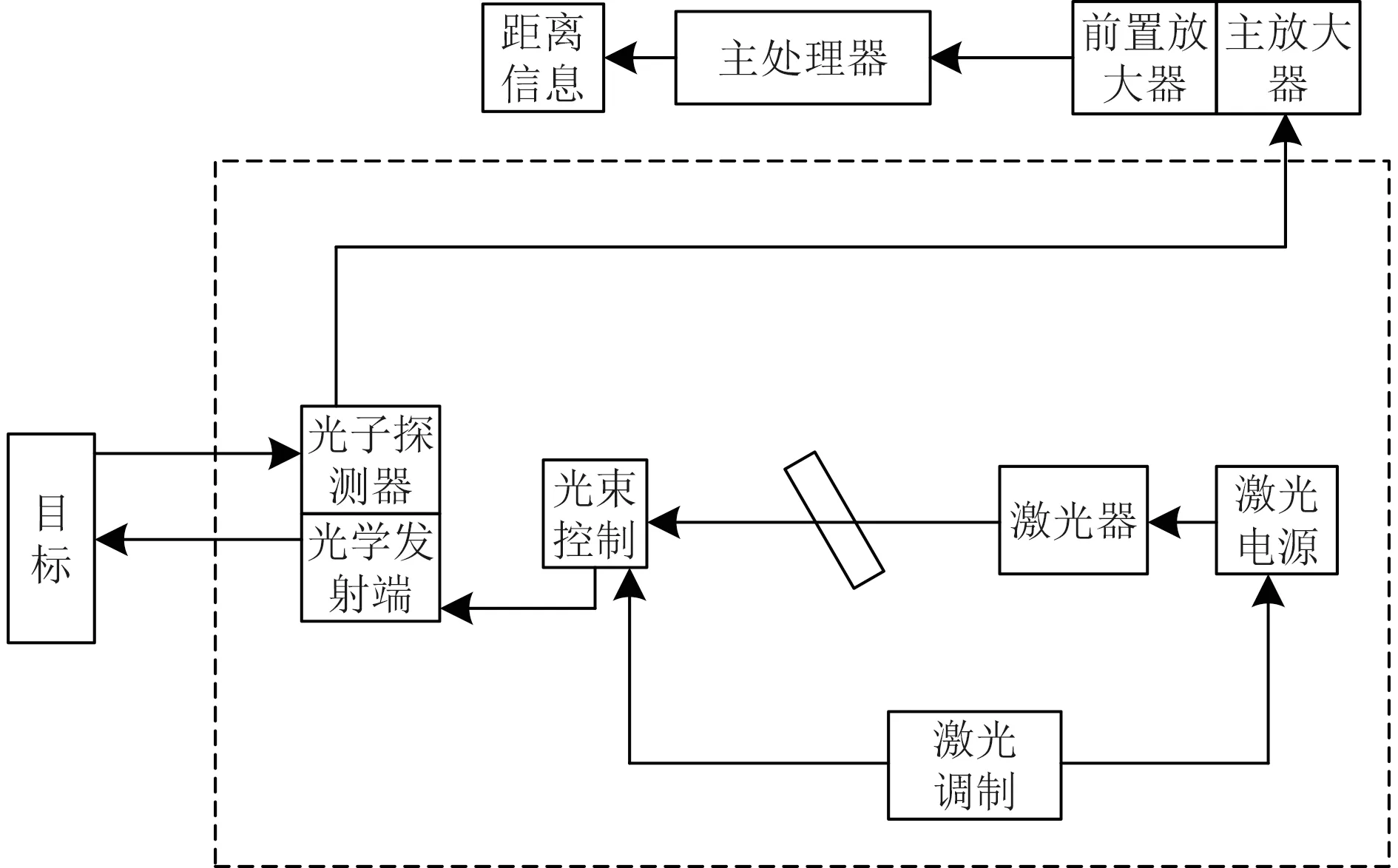
图3 激光雷达测距单元结构图Fig.3 Structural diagram of laser radar ranging unit
图4 为CAN 总线网络通信模块结构。系统中CAN总线网络通信模块结构分为通信节点、双路CAN 总线、网桥/中继器。通信节点以此和两路总线相连,节点运行状态无异常时,仅与一路总线相连执行数据通信服务,如果节点运行状态出现异常,便会快速与另一路CAN 总线相连,以此保证导航系统的通信服务不出现中断问题。网桥/中继器可为总线提供导航信息数据转发服务。
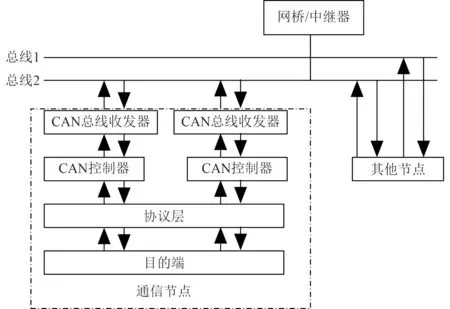
图4 CAN 总线网络通信模块结构Fig.4 CAN bus network communication module structure
1.2 基于激光雷达的障碍目标测距方法
激光雷达的光学发射端、光子探测器与船舶周围障碍物之间,可看作1 个三角形,使用三角形角度与边长的几何性质,便可运算障碍物和船舶自身的距离。此方法叫做三角激光测距法,如图5 所示。
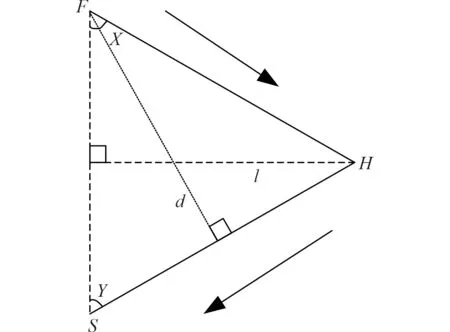
图5 三角激光测距法Fig.5 Triangular laser ranging method
1.3 船舶航迹控制器设计
系统所用的船舶航迹控制器的控制模式,属于间接航迹控制,此控制模式能把航向控制与航迹控制结合应用。航向控制能够保证船舶朝预设航向稳定航行,航迹控制能够保证船舶可根据障碍物测距数据,完成避障航行。图6 为船舶航迹控制器的控制方法示意图。航迹控制器将导航控制问题划分成3 个闭环串级控制环节(舵角、航向、航迹),此举能够保证船载GPS 定位设备异常时,直接启动航向控制程序,以此保证船舶稳定运行。
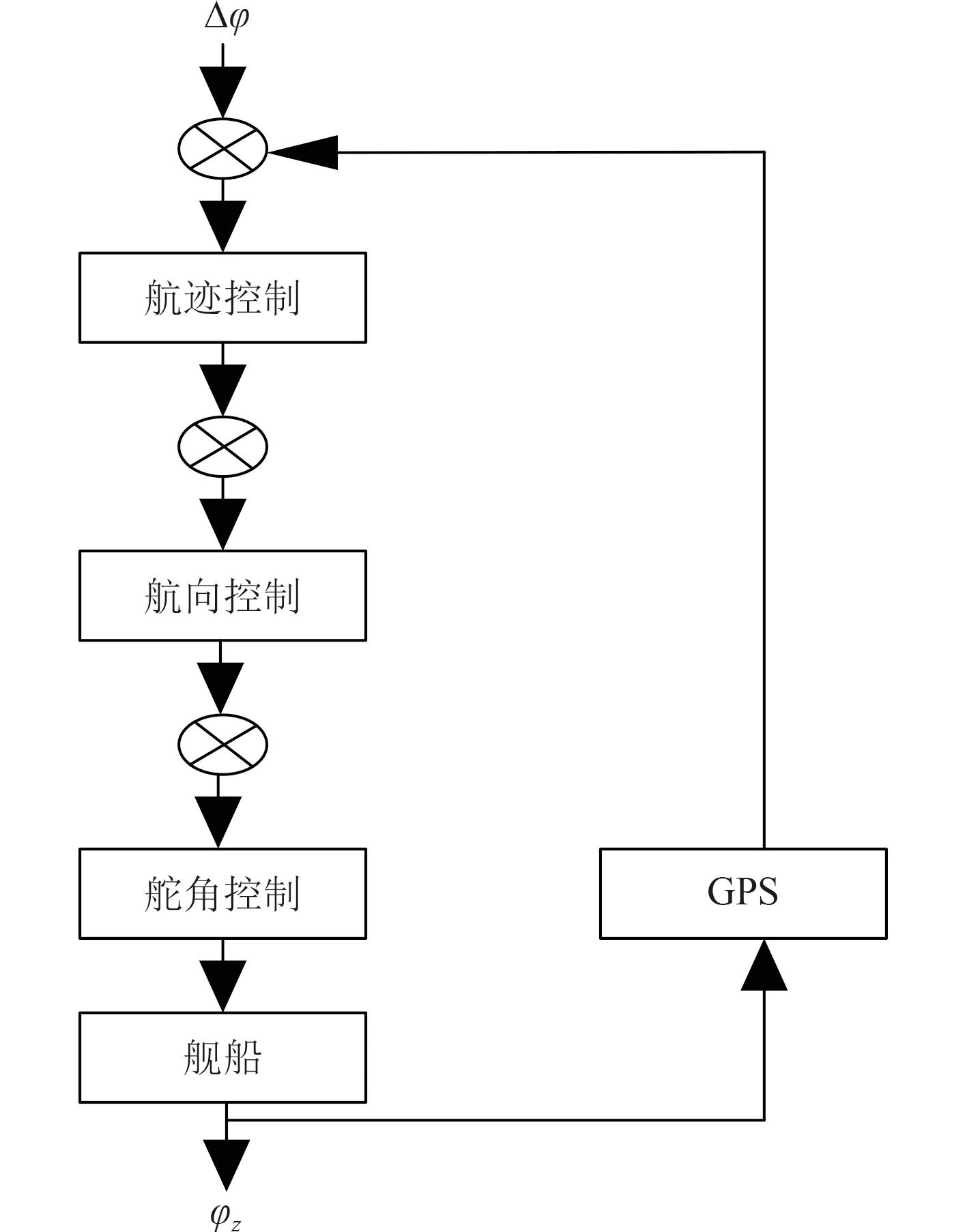
图6 船舶航迹控制器的控制方法示意图Fig.6 Schematic diagram of control method of ship track controller
2 实验结果与分析
为验证本文系统对船舶导航任务的使用效果,对其进行仿真实验。在导航过程中,本文系统所用激光雷达的参数信息如表1 所示。
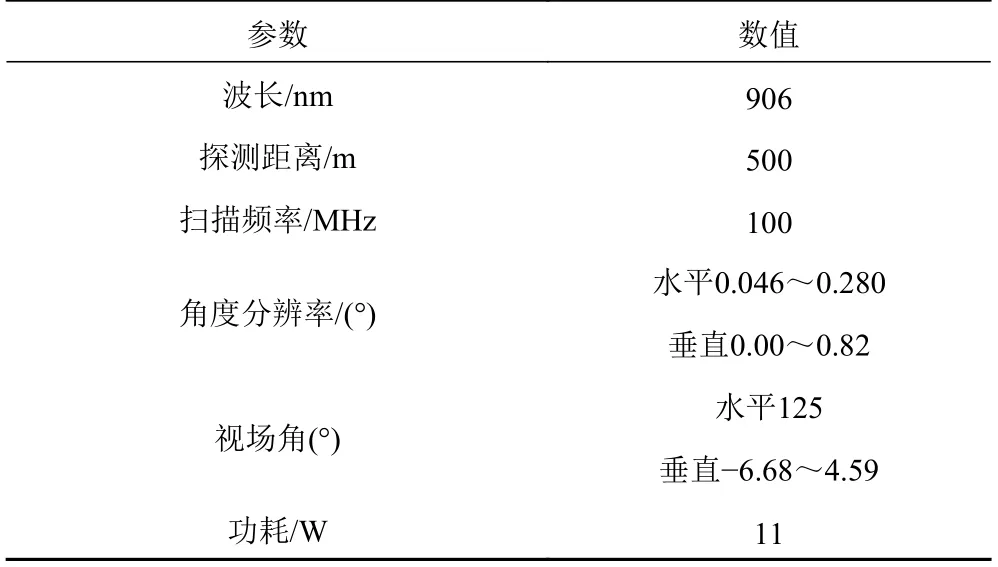
表1 激光雷达参数信息Tab.1 Lidar parameter information
设置船舶航行环境无风浪,图7 为船舶航行时本文系统的智能导航界面。本文系统使用下,船舶实际航迹与导航系统规划的预期避障航迹一致,不存在偏航问题,且未曾与障碍物碰撞,说明本文系统采用航迹控制器,可有效控制航行轨迹。
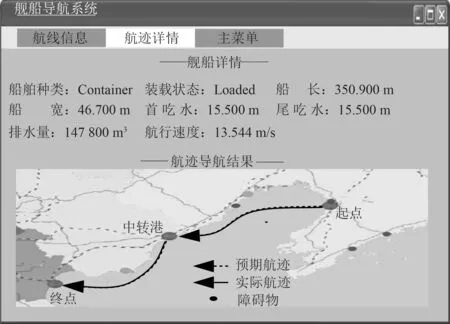
图7 本文系统的船舶智能导航界面图Fig.7 Interface diagram of ship intelligent navigation system in this paper
设定图中障碍物与船舶的距离在12 s 内的变化是1 km,本文系统对其进行测距,测距结果如图8所示。由图8 可知,本文系统使用激光雷达对障碍物的测距结果主要处于[999.99~1 000.01 m]范围中,由此可知,本文系统使用激光雷达对障碍物的测距误差是±1 cm,误差极小。
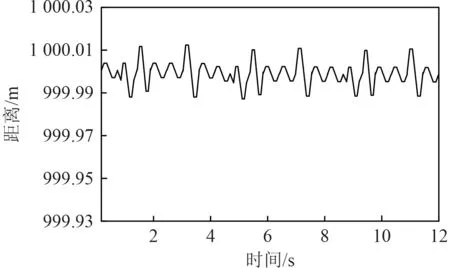
图8 激光雷达测距效果Fig.8 Laser radar ranging effect
本文系统在为船舶提供导航服务时,地面监控子系统与船舶子系统之间的数据传输延时测试如图9 所示。
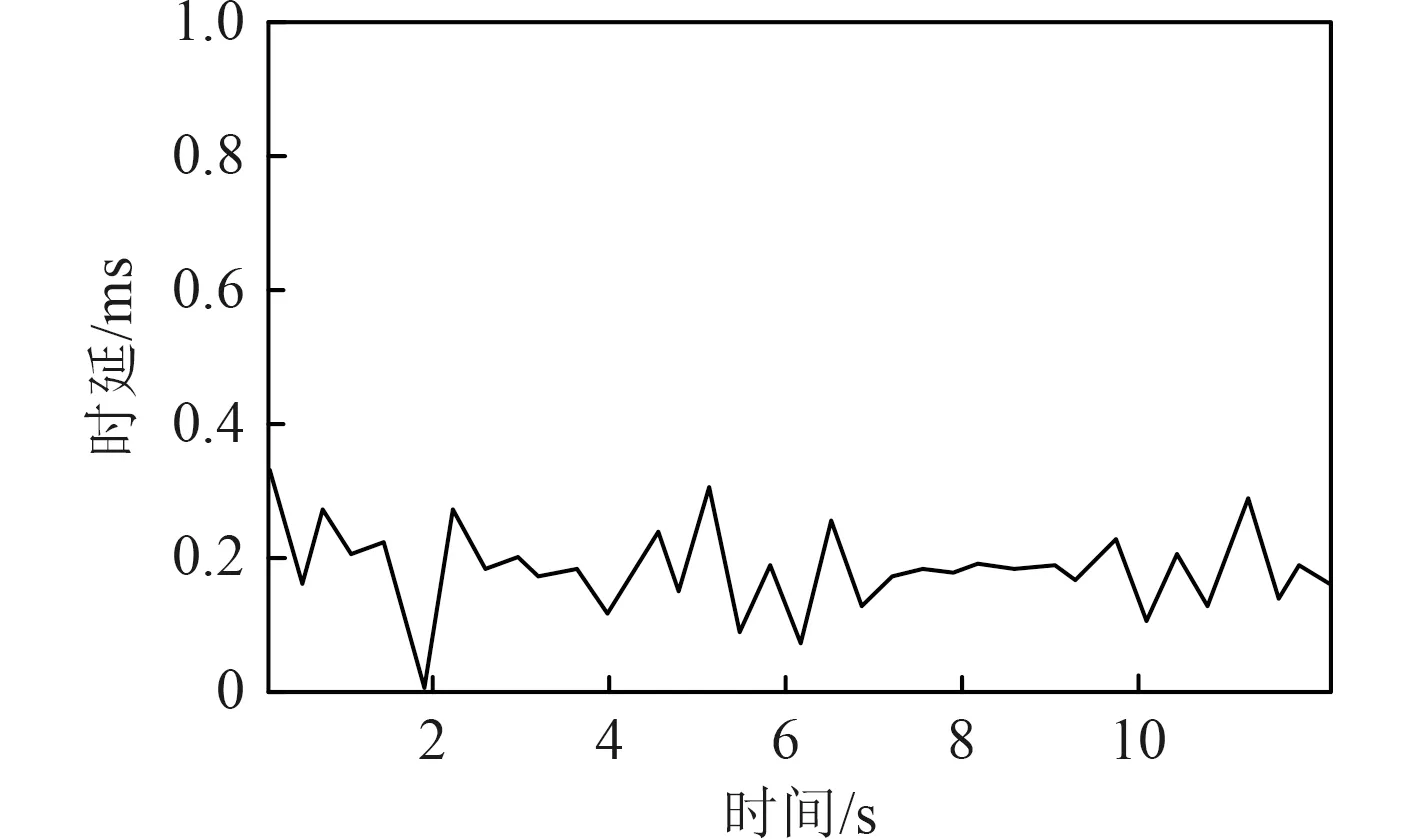
图9 系统数据传输延时测试结果Fig.9 System data transmission delay test results
可知,本文系统使用过程中,地面监控子系统与船舶子系统之间的数据传输延时小于0.4 ms,时延极短,说明CAN 总线网络通信模块的应用,可保证数据高效传输。
设置船舶航行环境存在2 级风浪,且船舶附近存在同类船舶,此类船舶可看作移动障碍物,此时,本文系统使用下,船舶的导航航行效果如图10 所示。当航行环境存在2 级风浪,且船舶附近存在移动障碍物时,本文系统应用后,航行轨迹与移动障碍物不存在碰撞情况,船舶可动态避障,安全运行至终点。由此证明本文系统能够有效规划船舶的动态避障轨迹,保证船舶可以安全地自起点位置航行至终点位置。
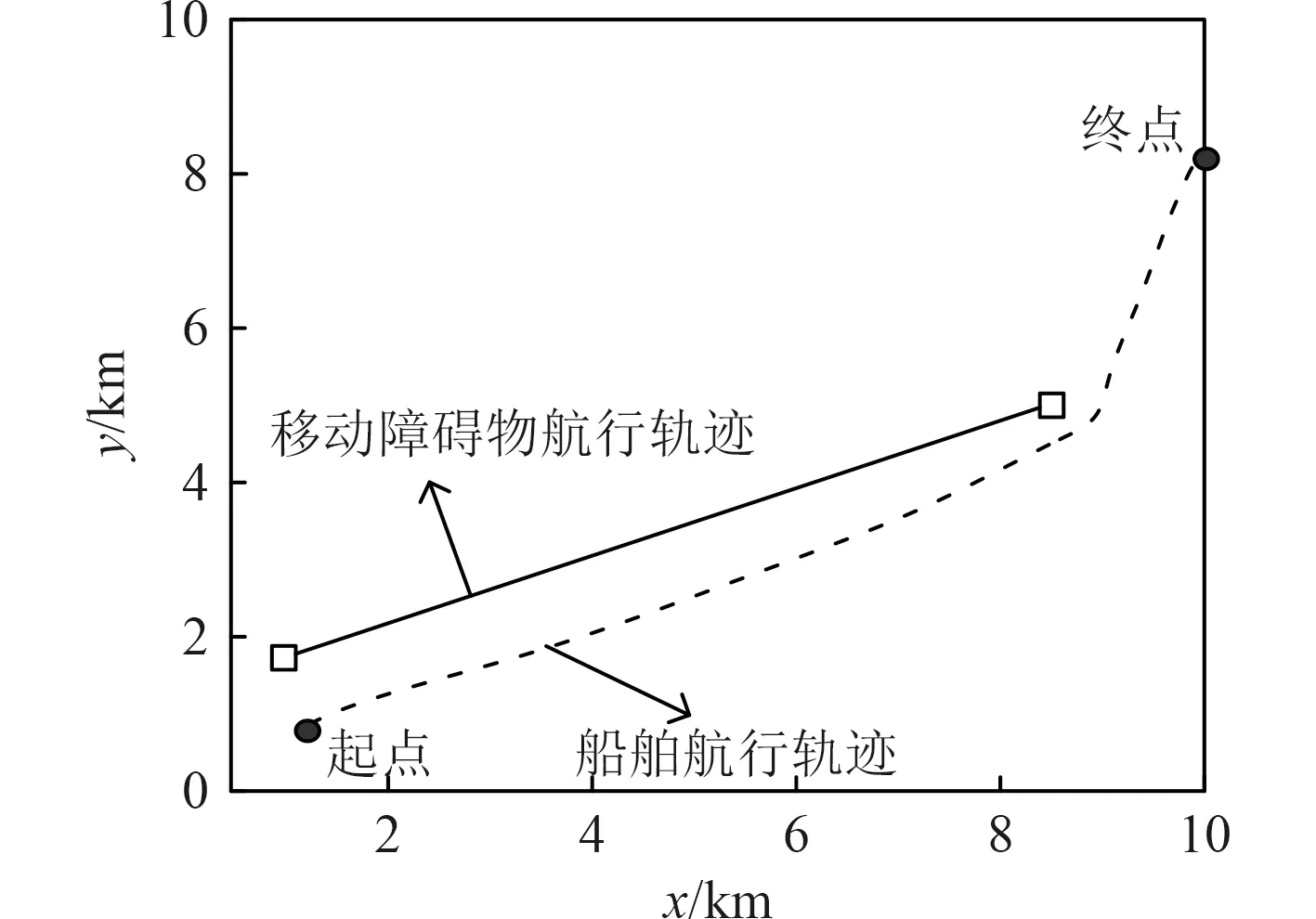
图10 本文系统的导航避障能力测试结果Fig.10 Test results of navigation obstacle avoidance ability of this system
3 结 语
针对目前船舶导航系统在协助船舶航行时,仅可以完成自我定位,而对航行障碍物信息的判断能力不足导致航行过程易出现碰撞问题,本文设计基于激光雷达和单目视觉的船舶智能导航系统。此系统可以在激光雷达与单目视觉技术的协助下,判断船舶航行环境中的障碍物类型与距离,从而完成智能、有效导航。
