基于无人机遥感影像的土壤重金属污染环境监测方法研究
2023-04-29高鲁红
高鲁红
关键词:土壤;重金属污染;无人机;监测;遥感影像
前言
土壤重金属污染元素含量超标后,对生态环境建设产生负面影响,甚至慢性危害人们的生命安全。因此,近年来,土壤污染环境治理工作越发受到重视,相应的各种土壤污染监测方法也开始涌现。文献[2]结合一体化监测理念,获取目标区域土壤的反射光谱,通过改进灰狼优化算法从反射光谱上选取特征波长,实现土壤污染浓度监测。但是该方法监测结果耗时长。文献[3]采集该区域卫星遥感影响,应用主导变异权重法和最邻近法统一影像尺度,结合多元线性回归模型进行反演,得到土壤污染监测结果。但是该方法监测结果的平均分析误差大。文献[4]应用无人机于生态环境监测,经过光谱数据处理、遥感反演分析等环节,实现污染监测。但是该监测方法应用局限性大。因此,因为无人机遥感的采集影像清晰度高、分辨率高的特点,在很多领域得到应用。文中参考传统土壤重金属污染环境监测方法,设计一种以无人机遥感影像为核心的技术,得到与实际情况相符的土壤重金属污染环境监测结果。
1设计以无人机遥感影像为核心的土壤重金属污染环境监测方法
1.1规划无人机区域作业航线
考虑到监测区域可能呈现为不规则的多边形作业区域,为了保证采集的无人机遥感影像可以覆盖整个研究区域,结合无人机遥感作业幅宽,将整个作业区域划分为多个子作业区域,从而规划更加合理的无人机飞行航线。在航线规划中,以无人机飞行起始点作为坐标原点,从该点向北向和东向分别引出Y轴和X轴,形成直角坐标系,监测区域在第一象限中。在该坐标系中设定OXY表示作业环境坐标系。设凸多边形作业区域总共有n条边界线,按照每一次无人机遥感影像拍摄范围,在整个监测区域中添加数条子区域分隔线,使得作业区域划分为多个子作业区域。再计算每个子作业区域的横坐标极限值,将极限值对应的坐标点看作无人机航点。按照递推原理可得出不同航点的坐标:
1.2区域无人机遥感影像的采集与处理
无人机连续垂直航拍得到研究区域的高分辨率遥感影像,作为土壤重金属污染环境监测的基础。为了便于土壤重金属污染监测分析,计算不同影像之间的单应性矩阵,实现遥感影像的拼接,单应性矩阵需要满足:
将上述式(3)代人式(4)内,可以确定世界坐标系内的点在图像坐标系内的具体坐标值。根据无人机遥感影像采集原理,描述不同视点下的航拍示意图,针对无人机遥感范围设置对应的大地平面,并分析该平面与原点之间的距离,可得出:
1.3构建基于随机森林的遥感反演模型
考虑到无人机遥感影像中可能同时存在植被信息和土壤信息,在遥感反演过程中,需要先应用像元二分模型提取土壤光谱信息,并计算反射率。在像元二分模型的作用下,分解影像光谱信息。
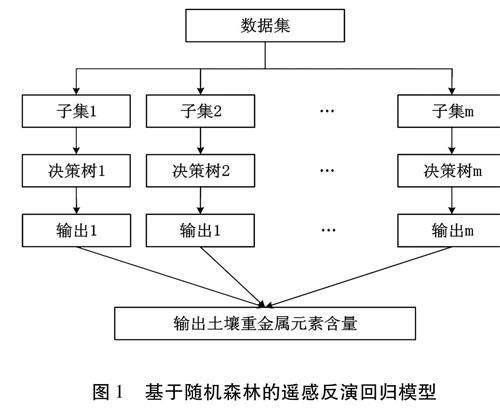
通过上述计算处理得到土壤光谱,在光谱敏感性分析处理后,从中提取光谱特征波段,并计算出光谱指数,作为反演模型的输入变量。而后,建立以随机森林算法为核心的遥感反演模型,按照重金属元素类型,将原始输入变量划分为多个训练子集,每个子集独立训练一棵决策树,分别得到不同重金属元素含量的回归分析结果,再进行平均加权运算,得出土壤重金属元素的具体含量。
如图1所示的遥感反演回归模型进行运算,输出目标检测区域土壤中每种重金属元素的具体含量,完成土壤重金属污染环境初步监测。
1.4获取土壤重金属污染环境监测结果
为了得到更加直观的土壤重金属污染环境监测结果,需要进行土壤重金属污染指数的计算。对于单一的土壤重金属污染元素来说,对土壤的影响可以表示为式(11):
根据综合污染指数划分标准可知,当式(12)的计算结果低于1,表明土壤重金属污染环境属于无污染级别,当综合污染指数在1~2之间,土壤重金属污染级别为微污染。而土壤重金属污染环境为中污染级别时,综合污染指数取值范围为2~3。综合污染指数计算结果大于3,土壤处于重度污染。
2实验
2.1数据获取
以岳阳县某地区为例,应用文章中提出的基于无人机遥感影像的方法,监测土壤重金属污染环境。通过实地考察可知,该研究区域临近洞庭湖,属于关键产粮区域。近年来,该区域为了提升农业粮食产量,大量使用农药、化肥等,导致土壤重金属污染不断加重。监测该区域的土壤重金属污染环境时,采用无人机搭载遥感影像采集设备,获取实验数据。按照文中研究内容规划无人机航线,无人机按照航线采集遥感影像,采用的无人机产自大疆创新科技有限公司,相关参数见表1。
设置无人机飞行高度为150m,得到地面分辨率为0.065m的遥感影像。在完成无人机遥感处理后,得到监测区域相关的遥感影像,作为土壤重金属污染环境监测所需的基本数据。
2.2土壤重金属污染环境监测结果
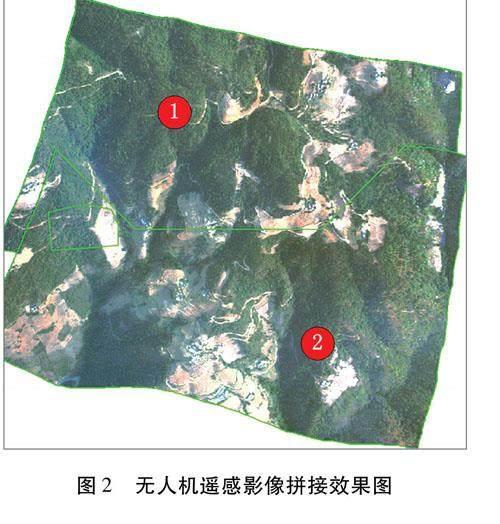
结合无人机控制系统提供的位置参数,拼接处理所有无人机遥感影像,使得多张相关影像之间进行拼接合并,最终拼接结果见图2。
如图2所示,两张遥感影像配准拼接后,可以得到包含更多地表特征信息的合并图像。而后在像元二分模型的作用下,提取遥感影像的土壤光谱信息,结合一阶微分、倒数对数等方式进行变换处理,获取无人机遥感影像的反射率,从中提取特征波段,作为基于随机森林的遥感反演回归模型的输入变量。分析监测区域可知,土壤重金属污染元素铬(Cr)的含量最高,造成的污染最严重。经过反演模型处理后,可以得到重金属元素Cr在土壤中的含量,并绘制见图3Cr含量分布图。
从图3可以看出,该区域的土壤重金属Cr含量绝大部分都在90mg·kg-1以下,表明其土壤污染情况不是很严重。而进一步计算可得出,区域土壤总体环境综合污染指数为1.8,属于微污染级别。
2.3监测方法性能对比
为了便于观察土壤污染监测结果,在研究区域内布置10个监测点,如图3所示。分别采用文中设计的监测方法、文献[4]提出的方法、文献[5]提出的方法进行土壤污染环境监测,文献方法具备普遍性,可以作为代表性的对比方法进行监测实验,三种监测方法得出的土壤环境污染指数如图4所示。而后采用实地采样加实验室测量的方式,获取土壤环境污染指数实际值,同样见图4。
从图4可以看出,所提方法监测得到的土壤重金属污染环境监测结果与实际值极为贴近,甚至点1、4、8、10的土壤环境污染指数监测值与实际值完全一致。而其他两种方法监测的土壤环境污染指数,与实际值之间存在较大偏差,这也表明所提监测方法可以得到更加真实的监测结果。
以均方根误差作为衡量指标,通过式(13)对图4中包含的数据进行计算,明确不同方法的土壤污染监测性能。
3结束语
考虑到土壤重金属污染具有极限的危害性,土壤重金属污染治理工作的开展成为热点问题。文中依托于无人机遥感影像,设计一种基于高光谱定量反演的土壤重金属污染环境监测方法。将目标监测区域划分为多个子作业区域,根据无人机遥感作业幅宽合理规划飞行航线。采用无人机搭载多光谱遥感相机,按照作业航线驱动飞行,采集整个监测区域的高分辨率无人机遥感影像,并基于单应性矩阵进行拼接处理,得到包含完整细节特征信息的遥感数据影像。运用像元二分模型提取影像中包含的土壤光谱信息,基于随机森林的遥感反演回归模型,确定土壤重金属污染元素的具体含量,结合单因子指数法和综合指数法,得到土壤污染指数监测结果。从实验验证结果可以看出,该方法监测结果更加贴近实际情况,指导后续污染治理工作。
