穴盘苗移栽自动取投苗技术研究现状与展望
2023-04-29张学东崔巍刘云强梁树建刘芳建刘立晶
张学东 崔巍 刘云强 梁树建 刘芳建 刘立晶

摘要:自动取投苗技术是自动移栽机研究的关键,是推动移栽作业全面机械化、自动化发展的重要一环。自动取投苗机构种类多、结构复杂,为使研究者或用户等能够更快、更系统地了解自动取投苗技术,以文献综述的方法,归纳总结国内外穴盘苗移栽自动取投苗技术,分为夹取式、顶出式、顶夹结合式、直落式四种类型;分析不同类别取投苗技术的工作原理和特点。指出应用于实际生产的自动取投苗技术研究成果存在稳定性差、可靠性低的问题,提出完善相关评价标准,推进机械式取投苗技术研究和小型机械装备的发展,推进适合多行作业、高效移栽的取投苗技术发展的措施。展望结构简单、性能稳定及作业智能的自动取投苗技术未来趋势,以期为我国自动移栽机的发展提供参考。
关键词:移栽机;穴盘苗;自动取投苗
中图分类号:S223.9
文献标识码:A
文章编号:20955553 (2023) 12001708
Research status and prospect of automatic seedling picking and dropping technology
of plug seedling transplanting
Zhang Xuedong1, 2, Cui Wei1, 2, Liu Yunqiang1, 2, Liang Shujian1, 2, Liu Fangjian1, 2, Liu Lijing1, 2
(1. Chinese Academy of Agricultural Mechanization Sciences Group Co., Ltd., Beijing, 100083, China;
2. National Key Laboratory of Agricultural Equipment Technology, Beijing, 100083, China)
Abstract:
The technology of automatic seedling picking and dropping is the key to the research of automatic transplanting machine, and it is an important part of promoting the comprehensive mechanization and automation of transplanting operations. There are many types of automatic seedling picking and dropping mechanisms with complex structures. In order to enable researchers or users and other relevant personnel to understand the automatic seedling picking and dropping technology faster and more systematically, this paper uses the method of literature review to automatically transplant seedlings in plug trays at home and abroad. The technology of picking and dropping seedlings is summarized and is divided into four types as follows: clipping type, ejecting type, combined top-clamping type and straight-falling type. The working principle and characteristics of different types of seedling picking and throwing technology are analyzed. It points out that the research results of automatic seeding technology applied in actual production have problems of poor stability and low reliability, and proposes measures to improve the relevant evaluation standards, promote the research of mechanical seeding technology and the development of small mechanical equipment, and promote the development of multi-row operation and efficient transplanting of seeding technology. The future development of automatic seedling picking and dropping technology with simple structure, stable performance and intelligent operation is prospected, so asto provide a reference for the development of automatic transplanting machines in China.
Keywords:
transplanter; plug seedlings; automatic seedling picking and dropping
0 引言
作物育苗移栽可以充分利用光热水等资源,提高种子出苗率和田间保苗率,增强作物对自然灾害和病虫害的抵御能力,解决农业种植茬口衔接矛盾,提高耕地利用率,增产增益,已成为现代化新型农业不断研究和推广的种植模式[12]。
作物移栽主要有裸根苗移栽和钵体苗移栽两种不同形式。穴盘苗属于钵体苗的一种,因其便于存放运输,苗株长势匀称,品质高,育苗过程机械化程度高,适合规模化生产,穴盘苗移栽在作物移栽种植模式中应用多,发展广[3]。目前国内外穴盘苗移栽机械根据自动化程度分为半自动移栽机和自动移栽机,两者主要区别在于半自动移栽机需要人工手动取投苗,作业效率较低,劳动强度大[4]。穴盘苗移栽自动取投苗技术研究是实现移栽作业全面机械化、自动化发展的重要一环。本文介绍国内外穴盘苗移栽自动取投苗技术研究现状,分析不同取投苗方式的工作原理和特点,以及在生产应用中存在的问题,并给出应对措施,对现阶段自动取投苗技术进行展望,旨在为我国自动移栽机的发展提供参考。
1 自动取投苗技术研究现状
经过第一二次工业革命的积淀,以欧美地区和日本为代表的发达国家率先进行作物移栽相关技术和机械装备的研究。到20世纪80年代,半自动移栽机和制钵机已经在生产中广泛应用。随着科学技术的进步,机械化取投苗技术更加成熟,适应性更广,可用于多种作物取投苗作业环节,移栽机自动化程度进一步提高[5]。我国20世纪50年代后期开始对移栽机械进行研究,相比发达国家,技术水平较低[67]。前期我国的自动移栽机主要依靠国外引进机型,因国内外作物品种、种植农艺、耕种环境等影响因素的差异,这些自动化移栽设备适应性差,市场推广难,应用少,半自动移栽机在我国市场流通的移栽机械总量中占较大比重。随着我国新型农业的发展,农业机械化、智能化程度要求的不断提高,很多高校、科研院所和农业类企事业单位开始加强自动化移栽技术特别是取投苗技术及设备研究。
因不同的作物穴盘苗物理特性不同,移栽机苗盘进给和栽植方式不同,国内外穴盘苗自动移栽机械取投苗技术可以分为夹取式、顶出式、顶夹结合式、直落式。
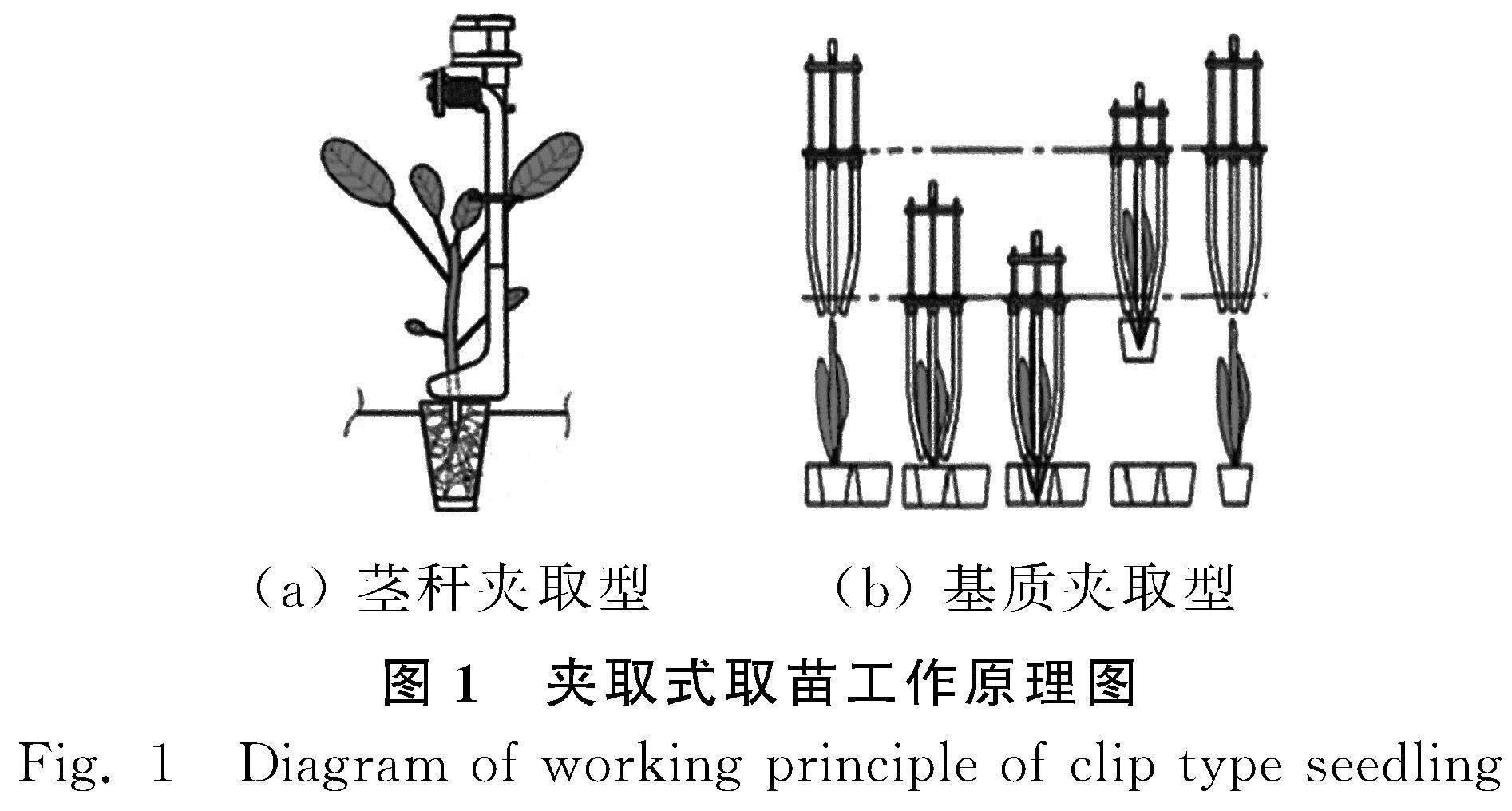
1.1 夹取式
通过送盘机构将穴盘苗移送至待抓取位置,由取苗爪末端执行部件夹持秧苗,从穴盘中取出并投放至下一级分投苗装置,或者直接投入栽植器,完成一个自动取投苗工作周期。根据取苗末端执行部件夹取秧苗的位置不同,可以分为茎秆夹取型和基质夹取型两类,工作原理如图1所示。
1.1.1 茎秆夹取型
取苗末端执行部件(多为夹子式结构)直接加紧苗株茎秆部位进行拉拔,将苗株根系和基质块从穴盘钵穴中一同拔出,到达指定投苗位置时末端执行部件松开,苗依靠自重落下,完成投苗。该方式主要应用于苗株茎秆长且粗壮,有较强韧性,直立度好的穴盘苗,例如番茄、辣椒等。同时该类取苗方式要求苗株盘根性高,基质块相对紧实,以避免基质破碎,钵穴粘连,苗根裸露等情况出现。对于叶展较大的作物苗株,该取苗方式易出现非移栽目标苗株的茎叶被末端执行部件连同加紧,一并取投的问题,降低移栽一致性和成功率。因此该方式对育苗要求较高,作物应用范围受限。该技术应用代表机型有新疆巴州良佳2ZB系列自动移栽机、宁津金利达田耐尔自动秧苗移栽机。
针对夹茎取苗过程中易伤苗、漏苗的问题,胡双燕等[8]以适栽期内128孔穴盘培育的辣椒苗为研究对象,对茎秆进行拉伸、挤压及弯曲力学特性试验和苗坨脱盘夹取力试验,并结合ANSYS软件对茎秆进行静力学分析。指明移栽过程伤苗的主要原因是取苗末端执行部件工作时对茎秆的径向挤压,而非取苗时的拉拔影响。
针对取苗机构夹取钵苗时会造成苗体和根系损伤的问题,李华等[9]以番茄穴盘苗为研究对象,模拟人工取投苗移栽过程,提出一种斜夹直拔夹取方式,并基于二阶椭圆齿轮行星轮系和凸轮摆杆机构设计取投苗机构和夹苗器,如图2所示。实现苗夹以最大张开角,斜向靠近茎秆并加紧,垂直于穴盘孔穴将苗拔出,且在苗体近乎直立的状态时完成投放。规避苗体茎叶对夹苗过程的干扰,减小茎叶损伤和多取漏取的概率,提高取、投苗成功率。取苗试验结果表明:80株/min的取苗频率下,取苗成功率92%,投苗成功率94.2%,伤苗率2.9%。
针对半自动辣椒移栽机作业效率低、劳动强度大的问题,韩长杰等[10]采用夹茎秆取苗方式研究设计一种辣椒穴盘自动移栽机,如图3所示。通过时序控制多气缸协同作业,实现整排取苗再分苗投苗,提高取苗效率,降低取苗爪运动轨迹和姿态的设计难度。取苗爪以合适的角度夹、取茎秆,减小对穴盘苗茎叶的干扰和损伤。
1.1.2 基质夹取型
取苗末端执行部件(多为针式结构)插入基质中,将苗株根系和基质一同加紧,从穴盘钵穴中取出,到达指定投苗位置时末端执行部件释放夹持力,苗坨在推苗机构作用下脱离装置,依靠自重完成投苗。该方式主要利用育苗过程中,苗株根系会在基质中穿插、缠绕和包裹,形成根系—基质复合体的特性。该复合体具有一定的弹性应变能力和抗压能力[11],保证末端执行部件插入、加紧及投放等操作不易损伤根系—基质复合体。该取苗技术成功率高,可靠性好,广泛应用于日本地区的自动移栽机,如久保田SKP-101系列移栽机、井关PVZ1移栽机、洋马PW20R移栽机等机型。对于叶展大、茎秆短的叶菜类作物,如生菜、甘蓝等,取苗末端执行部件在扎取苗时,容易对茎叶造成损伤,因此该方式对取苗末端执行部件的运动轨迹、取投苗姿态、穴盘苗育苗质量要求高,适栽期的穴盘苗需具备较好的根系—基质复合特性。
为保证取苗末端执行部件的运动轨迹与姿态,设计了行星轮系—滑道组合式取苗机构,如图4(a)所示。取苗爪在行星轮系机构和滑道的共同作用下,形成图中所示的取苗轨迹[12]。Islam等[13]设计了一种齿轮、凸轮、曲柄滑块多机构组合式取苗机构,如图4(b)所示,可实现直线取苗与摆动送苗作业要求。
俞高红等[14]基于椭圆—不完全非圆齿轮行星系设计一种蔬菜钵苗取苗机构,如图5所示,实现取苗针沿穴盘苗中线方向插入基质,沿该方向将苗从穴盘钵穴中取出。该结构降低了基质夹取型取苗方式对根系—基质复合体的滑切和扰动,降低了基质破损率,提高了取苗效率,增强了性能稳定性。崔巍等[15]设计一种双曲柄五杆式取苗机构,使得取苗末端执行部件实现理想的运动轨迹和取投苗姿态,同时解决非圆齿轮加工难,成本高的问题。
针对取苗末端执行部件夹取苗坨时易出现根土破坏的问题,韩绿化等[16]研究设计一种两指四针钳夹式基质夹取型末端执行器,如图6所示。
该机构利用气缸和橡胶气囊驱动,选择四针插入,两指加紧取苗,两指松放,四针回退投苗的工作原理,并基于穴盘苗力学特性设计夹取力。通过试验分析发现,当提取速度为40mm/s、入钵角为11°、插入深度为32mm、单穴为4株、含水率为55%~60%时,取苗执行部件对苗坨根土破坏程度最小。
1.2 顶出式
常规育苗穴盘下方设有排水孔,顶杆透过排水孔作用根系—基质复合体下端面,将苗从育苗穴盘中顶出,顶落的苗由下一级分投苗装置有序投放至栽植器中,完成取投苗。该方式主要利用穴盘苗根系—基质复合体具有一定的黏弹性,不容易破碎。顶杆仅做直线往复运动,结构简单,不易对苗的茎叶造成直接损伤。该技术应用代表机型有常州亚美柯2ZS-4(OPK-4)全自动蔬菜钵苗移栽机。常规穴盘苗末端根系较少,部分基质碎屑会经由排水孔流失,导致整个根系—基质复合体呈现上紧下松的物理特性。因此要求顶杆直径大小既能保证顶杆透过排水口,又能避免其过细直接插入复合体,导致基质破碎和取投苗失败。根据顶出式取苗实现方式的不同,可以分为机械驱动、电驱动、气动和顶杆与射流组合四种类型。
1.2.1 机械驱动型
一般采用凸轮、曲柄滑块、拨杆等结构,搭配弹簧,实现顶杆的顶推和复位。该类型系统简单,可靠性强,整体传动较复杂,且存在机械摩擦,相关部件易磨损,动作精度较差。
针对玉米钵苗移栽机,尹大庆等[17]提出一种顶出式有序分秧机构,如图7所示。驱动轴错位均布8个拨杆,联动苗盘匀速连续进给,8个拨杆依次通过杠杆传动,推动对应的顶杆将苗顶出,在弹簧的作用下顶杆复位,驱动轴旋转一周可有序取投苗8次。在拨杆和顶杆之间增加杠杆传动,大幅提高顶杆的移动速度,实现苗盘非间歇进给取苗。
1.2.2 电驱动型
一般采用伺服电机与机械结构相结合方式驱动顶杆往复运动。该类型简化了纯机械机构的传动系统,整体结构更加紧凑;引入电控系统,易于控制,方便顶杆往复运动不同阶段速度调节,减小冲击力,有利于降低基质破损率,提高取投苗效率。
针对顶杆推顶易造成秧苗损伤的问题,杨传华等[18]设计一种基于PLC控制的钵苗自动输送装置。采用伺服电动缸驱动顶杆,速度快、精度高、可控性强。采用慢推快回的设计思路,而且可根据不同作物穴盘苗苗坨不同的物理特性调节推顶速度,降低顶苗过程顶杆对苗坨的损伤,提高取苗机构适应性。
1.2.3 气动型
利用气缸驱动顶杆支架,将穴盘苗顶出,动作迅速、反应快、调节方便、易于自动控制。气动元件结构简单、成本低、耐用性强。因需要提供气源,对于田间移栽机械增加气泵装置,使整机结构复杂。
针对顶出式取投苗,穴盘苗顶出后存在翻滚,运动轨迹不可控,落点不精确的问题,文永双等[19]研究设计了一种插入顶出式取投苗装置,主要由插入顶出机构、送盘机构、翻板机构和送苗机构等组成,工作原理如图8所示。通过设置穴盘苗中线与顶杆中轴线的夹角,减小穴盘苗斜抛初始角速度、斜抛角度以及下落高度减轻苗体的翻转。在顶杆末端增设了扁针预先固定苗体姿态,通过翻板和梳理板阻止苗坨粘连顶杆,提高落苗的整齐度和落点精度。
1.2.4 顶杆与射流组合型
顶杆驱使苗坨从穴盘脱离,主要需要克服苗坨与穴钵腔接触面之间的黏结力和摩擦力。为避免顶杆与根系—基质复合体直接机械接触导致顶杆刺入苗钵,提高取苗成功率,Shaw[20]设计了一种气流与顶杆结合式取投苗装置,如图9所示。顶杆内部中空,顶端封闭,在靠近顶杆顶端的位置设有数个与顶杆轴线成一定角度的细孔。顶苗时先由细孔喷出有压气流抵消部分黏结力,促使苗坨和穴钵腔松动,再由顶杆机械接触将穴盘苗完全顶出。经过试验证明,增加气流辅助作用使顶出式取投苗成功率明显提高。
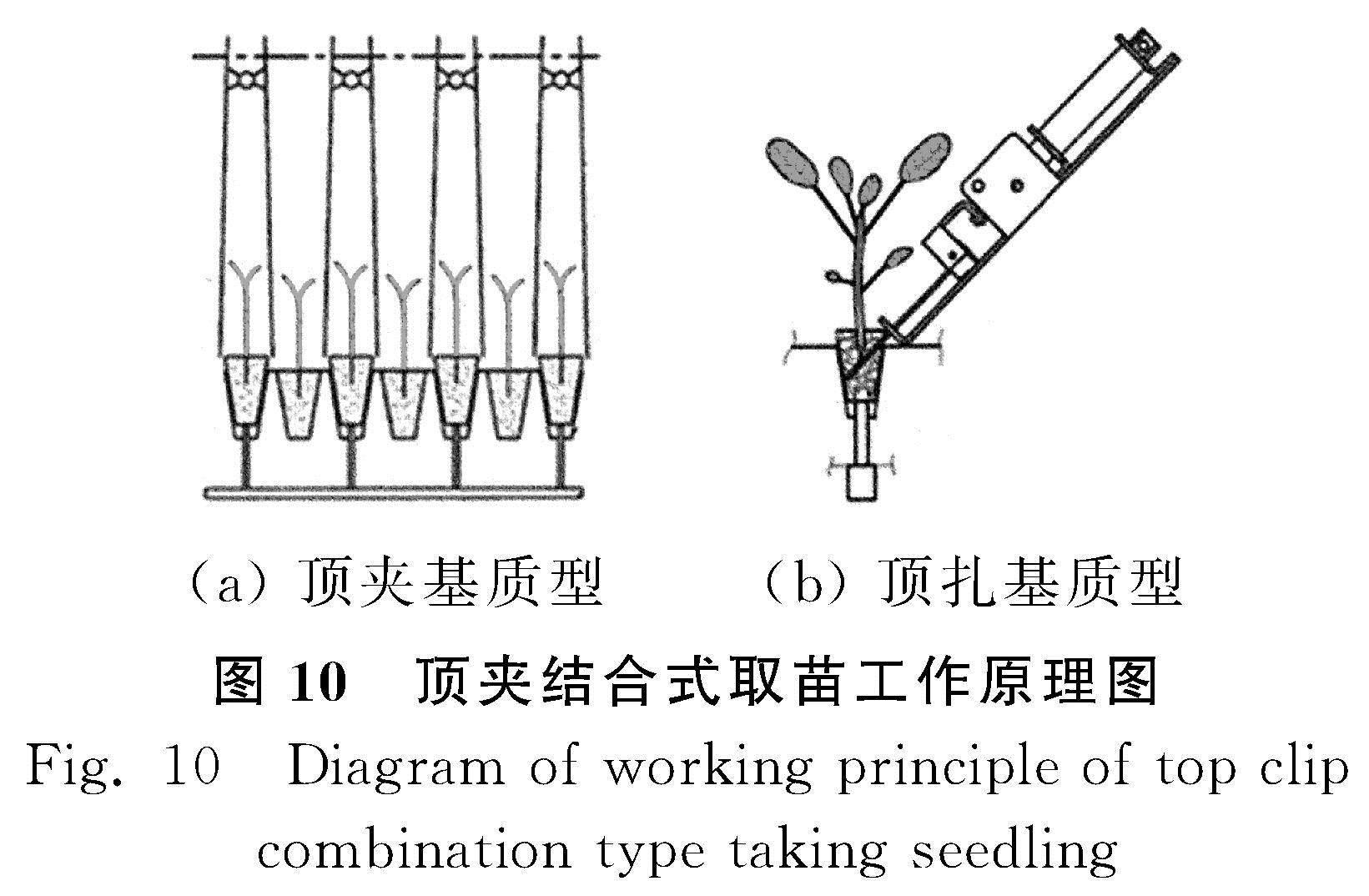
1.3 顶夹结合式
该类取苗方式实质为夹取式和顶出式取投苗方式的组合,工作原理是苗盘进给装置将穴盘苗移送至目标位置,苗坨经由顶苗杆作用脱离穴钵腔,由取苗爪末端执行器夹持苗体离开穴盘区域,投放至下一级分投苗装置,或直接投放至栽植器,完成一次取投苗。依据取苗末端执行部件结构和夹取方式分类,分为顶夹基质型和顶扎基质型两类,如图10所示。
1.3.1 顶夹基质型
取苗爪为一定宽度的夹板,顶杆将苗坨从穴钵腔中顶出并推入取苗爪夹持区域,取苗爪夹持整个苗坨进行取投苗。采用该类取苗方式作业,苗体根系和茎叶不易受损,弱化取苗爪末端执行器运动轨迹和姿态要求,一定程度解决叶展大、无茎秆特点的作物穴盘苗机械化移栽取苗难题。该技术应用代表机型有意大利的FUTURA自动移栽机,其取苗机构采用顶夹结合方式整排取苗,整排投放至旋转式导苗桶,由导苗桶有序投放至栽植器中。整机集成机电一体化技术,作业效率高达4500株/(h·行),适合地势平坦、种植面积较大的区域作业,整体结构复杂,成本高,维护困难。
针对现在顶夹结合式取苗机构系统复杂,成本高等问题,金鑫等[21]将整个取投苗流程分解为穴盘进给、顶苗、苗爪开合和翻转四个动作,设计一种纯机械传动的穴盘苗自动输送装置。采用凸轮机构驱动苗盘横向移动,槽轮机构驱动苗盘纵向进给,曲柄滑块机构驱动顶杆工作,凸轮与齿轮齿条机构结合驱动苗爪的开合和翻转。试验结果显示:在取苗速度140株/min时,取基质含水率32.79%时,取苗成功高达98.44%,基质损失率36.67%,满足移栽种植要求。
基质损失率高的主要原因是在顶苗过程中,基质低端在顶杆的作用下,沿茎秆方向发生压缩变形,当苗夹施加垂直于茎秆方向的夹持力时,基质又沿此方向发生形变,导致根系—基质复合体原有物理特性改变,未能与根系结合紧密的基质颗粒在取投苗过程中极容易脱落,造成基质损失[22]。
1.3.2 顶扎基质型
取苗爪一般为针式结构,针状取苗爪以一定的角度插进由顶杆顶出的苗坨,苗随取苗爪运动至投苗位置,由推苗机构作用脱离,完成投苗。采用该类取苗方式作业,运行可靠,相比基质夹取型取投苗方式,苗坨不易于穴钵腔粘连,基质破损率低,取投苗成功率更高。Isao[23]设计一种取苗装置,如图11所示。顶杆将苗坨从水平放置的苗盘顶出,取苗针同步插入苗钵取苗,随后持苗移动至投苗位置,取苗针缩回完成投苗。
与该装置类似,何亚凯[24]提出一种顶扎基质型取苗装置。顶杆将穴盘苗从穴钵顶出的同时,针式取苗爪与穴盘苗成一定角度插入苗坨,完成取苗。该研究有效解决基质损失率高的问题,同时倾斜扎取苗坨还减小对苗茎叶的损伤,提高取投苗成功率。
顶夹结合式取投苗技术兼备夹取式和顶出式两种取投苗方式的优点,提高取投苗成功率同时,降低对苗的损伤率,提高移栽机适应性。应用顶夹结合式取投苗技术的装置结构较复杂,尺寸较大;除机械系统外,一般还增加电动和气动等工作元件及相应的控制系统,整体成本较高;各个系统时空配合精度要求高,控制复杂。
1.4 直落式
直落式取投苗技术主要依靠空气整根营养钵育苗技术的发展。该育苗技术采用口小底大,上下通透的四棱锥台形穴钵腔育苗盘。相关育秧试验和移栽试验研究表明,空气整根钵苗秧苗粗壮,根须多且粗壮,根系—基质复合体的弹性应变能力和抗压能力更好。取投苗时,穴盘苗在取苗机构和重力的共同作用下,有序直落到下一级分投苗机构,或直接投入栽植器。根据取苗机构作用方式不同,可以分为机械式和气力式两种。
1.4.1 机械式
通过上下往复运动的末端执行部件直接接触苗钵,机械式下压,促使空气整根钵苗从穴盘中下落,完成取投苗作业。马旭等[25]针对空气整根钵苗移栽机设计了一种机械式取投苗机构,如图12所示。回转运动的拨指套周期性驱动杠杆,杠杆另一端做向下的圆弧摆动,通过双向导柱和滑槽的导向,将杠杆的圆弧摆动转化为投苗执行部件的下压运动。整体结构简单,可靠性强。
1.4.2 气力式
通过输送有压气体,在苗坨上下面产生压力差,依靠这种压力差将空气整根钵苗从穴盘中推落,完成取投苗作业。针对完全依靠气吹方式取苗,耗能高,成功率低的问题。袁挺等[26]提出了一种气吹振动复合的取投苗技术,如图13所示。该装置主要由送苗机构,振动机构和气吹机构组成。在振动器和弹簧的作用下,穴盘不断做简谐运动,依靠惯性打破苗坨与穴钵内壁的黏附力。当钵苗运动至投苗位置时,在气压、振动和重力的共同作用下,完全克服与穴钵内壁的黏附力和摩擦力,从穴盘中脱落,完成取投苗作业。以甘蓝苗为试验对象,结果表明:当基质含水率为55%,振动频率为36Hz,气压为0.45MPa时,取苗成功率为92%,基质破损率为3.46%,满足移栽要求。
直落式取投苗技术原理及装置结构简单,成功率高,可同时完成取苗和投苗,效率高。缺点是空气整根营养钵育苗穴盘的尺寸结构明显区别于一般穴盘,目前该取投苗技术尚处于研究阶段,会提高育苗成本,不便于技术和设备推广;由于口小底大的特殊结构,取投苗作业时,限制叶展大小不能超过上口尺寸,避免下落时穴盘刮伤苗体茎叶。
通过对四种穴盘苗自动取投苗技术特点和研究现状进行对比分析,如表1所示。夹取式取苗性能稳定,适应强;顶出式取苗结构简单,伤苗率低;顶夹结合式取苗技术同时具备夹取式和顶出式的优点,但装置整体结构复杂;直落式取苗可同时完成取投苗,可靠性强,但需要定制穴盘,育苗成本高。
2 存在问题与发展建议
2.1 存在问题
2.1.1 穴盘制造、育苗技术与自动取投苗技术匹配度差
穴盘制作、穴盘育苗作为自动移栽作业的前置环节,直接影响自动取投苗效果的好坏。我国移栽装备技术发展的几十年里,各个环节发展相对独立,结合紧密程度低,无统一的标准化要求,如现有育苗穴盘孔穴数虽然已经形成统一规格标准,但在穴钵腔体容积大小、深度、上口下底以及排水孔的尺寸和局部结构设计,不同品牌的育苗穴盘差异明显,整体质地软硬程度也不尽相同。穴盘育苗水平参差不齐,苗株根系的盘根性、苗坨紧实程度和含水率、适栽期苗株高度及叶展宽度无统一的评价标准和要求。这种差异的存在对穴盘进给精准定位,降低基质破损率和伤苗率,提高取投苗成功率和可靠性造成困难,进一步提高了移栽机械装备的设计要求,一定程度阻碍了自动取投苗技术的发展和移栽作业全程机械化进程的推进。
2.1.2 取投苗技术通用性差
现有的取投苗技术大多是针对特定种类或品种的作物、特定地域种植农艺研发的,如针对新疆地区的辣椒、番茄等茄果类蔬菜,东北地区玉米等。市场上流通的移栽取投苗装置通用性差,一旦更换作物对象进行移栽作业,伤苗率、基质破损率、取投苗成功率和可靠性等受明显影响。我国农业种植有作物轮作需求,取投苗技术通用性差这一问题提高了种植户的购机成本,阻碍了移栽作业机械化发展。
2.2 发展建议
2.2.1 穴盘制造、育苗技术标准化
根据我国作物移栽农艺要求,结合育苗穴盘制造行业发展现状,统一穴盘规格,制定明确的技术参数,使育苗穴盘设计与制造有章可循;加强育苗行业培训,提高整体育苗水平,强化各类技术标准,对适栽期穴盘苗育苗质量有统一的评价标准和要求。例如统一孔穴规格的穴盘,形状位置尺寸应保持一致;适栽期穴盘苗基质含水率在规定范围内,茎秆直立度、叶展大小、苗株根系盘根性和苗坨弹性应变能力和抗压能力等评价标准符合机械化取投苗技术要求。机械化移栽是一项系统性工程,将自动取投苗技术研究与穴盘制造、制钵、育苗等工作环节紧密结合,将取投苗机械研发过程中的问题和难点分散,通过多个技术环节配合,共同解决机械研发环节难以攻克的难题。
2.2.2 应用新理念研发高性能取投苗技术
总结国内外取投苗技术的优缺点,紧密结合我国移栽作业国情,对我国穴盘苗自动取投苗技术进行创新性突破。如继续加强穴盘苗力学特性基础研究,为取投苗技术研究提供真实有效的数据支撑;应用仿真模拟等现代化科研手段,缩短研发周期,增加优化次数,提高研究成果的可靠性;在保证取投苗技术成功率和稳定性的前提下,加强其对穴盘苗差异化的通用性和自适应能力;加快科研成果转化率,将研究成果落实到实际生产,通过农业种植生产过程,反馈技术研究的难点和突破方向,促进高性能取投苗技术研发不断进步。
3 展望
取投苗技术是穴盘苗自动化移栽发展的重要环节,国内外在这方面的研究已经取得长足发展,很多有针对性作业对象的取投苗移栽机构,可以完成规定要求的移栽作业任务。但现有的取投苗技术在我国农业生产中的应用和普及程度依然不够,大部分研究成果仍处于试验阶段,科技成果转化率低。应用于实际生产的自动取投苗技术研究成果存在稳定性差、可靠性低的问题,未能明显改变采用人工取投苗的半自动移栽作业仍然占机械化移栽作业绝大比例的生产种植局面。根据现有穴盘苗自动取投苗技术发展现状和机械装备市场应用情况,对近阶段自动取投苗技术发展提出以下建议。
1)行业及相关部门进一步推进穴盘生产、制钵、育苗和机械化移栽各个环节的一体化发展,紧密结合各个环节,完善相关评价标准,有利于取投苗等移栽技术研究和相关机械装备的发展。
2)针对新疆、东北等地块大,地势平坦区域,着重推进适合多行作业,高效移栽的取投苗技术发展,提高移栽作业的效率和质量,提高移栽机械装备的自动化程度;对于地块小,多为山区和丘陵地带的地域,侧重机械式取投苗技术研究和小型机械装备的发展,提高移栽作业机械化水平。
3)从现在移栽机械应用现状和需求看,结构简单、性能稳定及作业智能是未来取投苗技术发展的主要方向,降低伤苗率,提高可靠性和通用性是迫切需求。应充分将识别技术、智能控制等现代技术应用在取投苗技术研究上,研究生产出智能化通用型取投苗机构。
参 考 文 献
[1] 全国蔬菜产业发展规划(2011—2020年)[J]. 中国蔬菜, 2012(5): 1-12.
[2] 于晓旭, 赵匀, 陈宝成, 等. 移栽机械发展现状与展望[J]. 农业机械学报, 2014, 45(8): 44-53.
Yu Xiaoxu, Zhao Yun, Chen Baocheng, et al. Current situation and prospect of transplanter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53.
[3] 王帅. 育苗移栽机具的发展现状及趋势[J]. 农业科技与装备, 2019(2): 58-59.
Wang Shuai. Development situation and trend of seedling transplanting machine [J]. Agricultural Science & Technology and Equipment, 2019(2): 58-59.
[4] Kumar G V P, Raheman H. Vegetable transplanters for use in developing countries-a review [J]. International Journal of Vegetable Science, 2008, 14(3): 232-255.
[5] Kumar G V P, Raheman H. Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings [J]. Biosystems Engineering, 2011, 110(2): 189-197.
[6] 王君玲, 高玉芝, 李成华. 旱地钵苗移栽机械化生产的现状及发展趋势[J]. 中国农机化, 2003(6): 12-14.
[7] 张会娟, 胡志超, 吴峰, 等. 国内育苗移栽机械概况与发展思考[J]. 江苏农业科学, 2010(6): 570-572.
[8] 胡双燕, 胡敏娟, 张文毅, 等. 辣椒穴盘苗茎秆力学特性试验与仿真研究[J]. 中国农机化学报, 2022, 43(3): 9-18.
Hu Shuangyan, Hu Minjuan, Zhang Wenyi, et al. Experimental and simulation study on mechanical properties of stem of pepper hole seedlings [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(3): 9-18.
[9] 李华, 马晓晓, 曹卫彬, 等. 夹茎式番茄钵苗取苗机构设计与试验[J]. 农业工程学报, 2020, 36(21): 39-48.
Li Hua, Ma Xiaoxiao, Cao Weibin, et al. Design and experiment of seedling picking mechanism by stem clipping for tomato plug seedling [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(21): 39-48.
[10] 韩长杰, 肖立强, 徐阳, 等. 辣椒穴盘苗自动移栽机设计与试验[J]. 农业工程学报, 2021, 37(13): 20-29.
Han Changjie, Xiao Liqiang, Xu Yang, et al. Design and experiment of the automatic transplanter for chili plug seedlings [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(13): 20-29.
[11] 韩绿化, 赵峥嵘, 马国鑫, 等. 蔬菜穴盘苗钵体压缩—力松弛特性[J]. 江苏农业科学, 2018, 46(23): 271-274.
[12] 俞高红, 王磊, 孙良, 等. 大田机械化移栽技术与装备研究进展[J]. 农业机械学报, 2022, 53(9): 1-20.
Yu Gaohong, Wang Lei, Sun Liang, et al. Advancement of mechanized transplanting technology and equipment for field crops [J]. Transactions of the Chinese Society for Agricultural Machinery, 2022, 53(9): 1-20.
[13] Islam M N, Iqbal M Z, Ali M, et al. Kinematic analysis of a clamp-type picking device for an automatic pepper transplanter [J]. Agriculture, 2020, 10(12): 1-7.
[14] 俞高红, 陈志威, 赵匀, 等. 椭圆—完全非圆齿轮行星系蔬菜钵苗取苗机构的研究[J]. 机械工程学报, 2012, 48(13): 32-39.
Yu Gaohong, Chen Zhiwei, Zhao Yun, et al. Study on vegetable plug seedling pick-up mechanism of planetary gear train with ellipse gears and incomplete non-circular gear [J]. Journal of Mechanical Engineering, 2012, 48(13): 32-39.
[15] 崔巍, 方宪法, 赵亮, 等. 齿轮—五杆取苗装置机构优化与试验验证[J]. 农业机械学报, 2013, 44(8): 74-77.
Cui Wei, Fang Xianfa, Zhao Liang, et al. Structural optimization and experimental verification of geared five-bar linkage seedling pick-up device [J]. Transactions of the Chinese Society for Agricultural Engineering, 2013, 44(8): 74-77.
[16] 韩绿化, 毛罕平, 严蕾, 等. 穴盘育苗移栽机两指四针钳夹式取苗末端执行器[J]. 农业机械学报, 2015, 46(7): 23-30.
Han Lühua, Mao Hanping, Yan Lei, et al. Pincette-type end-effector using two fingers and four pins for picking up seedlings [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 23-30.
[17] 尹大庆, 张烁, 辛亮, 等. 玉米钵苗顶出式有序分秧机构的设计与试验[J]. 农业工程学报, 2018, 34(9): 68-74.
Yin Daqing, Zhang Shuo, Xin Liang, et al. Design and test of mechanism of push-out separating seedling for maize pot seedling [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(9): 68-74.
[18] 杨传华, 方宪法, 杨学军, 等. 基于PLC的蔬菜钵苗移栽机自动输送装置[J]. 农业机械学报, 2013, 44(S1): 19-23, 18.
Yang Chuanhua, Fang Xianfa, Yang Xuejun, et al. Automatic delivery mechanism of potted-seedling for vegetable transplanter based on PLC [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(S1): 19-23, 18.
[19] 文永双, 张俊雄, 张宇, 等. 蔬菜穴盘苗插入顶出式取苗装置研制[J]. 农业工程学报, 2020, 36(22): 96-104.
Wen Yongshuang, Zhang Junxiong, Zhang Yu, et al. Development of insertion and ejection type seedling taking device for vegetable plug seedlings [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(22): 96-104.
[20] Shaw L N. Removing and handing modular vegetable seedling from nursery trays [J]. Proceedings of the Florida State Horticultural Society, 1999, 112: 152-155.
[21] 金鑫, 杜新武, 杨传华, 等. 蔬菜移栽穴盘苗自动输送装置设计与试验[J]. 农业机械学报, 2016, 47(7): 103-111.
Jin Xin, Du Xinwu, Yang Chuanhua, et al. Design and experiment on automatic transporting mechanism for vegetable potted seedlings [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 103-111.
[22] 刘卫想, 金鑫, 杜新武, 等. 顶出—夹取式自动取苗机构运动学分析[J]. 江苏农业科学, 2016, 44(7): 385-389.
[23] Isao M. Seedling transportation apparatus for transplant-ation machine [P]. EP0806131A1, 1997-11-12.
[24] 何亚凯. 蔬菜穴盘苗高速栽植自动取苗系统设计与研究[D]. 北京: 中国农业机械化科学研究院, 2018.
He Yakai. Design and research on automatic pick-up system for vegetable plug seeding transplant in high speed [D]. Beijing: Chinese Academy of Agricultural Mechanization Sciences, 2018.
[25] 马旭, 马成林, 孙玉晶, 等. 空气整根钵苗移栽器送秧及投苗机构的研究[J]. 农业机械学报, 1996(S1): 52-56.
Ma Xu, Ma Chenglin, Sun Yujing, et al. The study of feeding and dropping seedling mechanism on air-pruning tray seedling growing transplanting unit [J]. Transactions of the Chinese Society for Agricultural Machinery, 1996(S1): 52-56.
[26] 袁挺, 王栋, 文永双, 等. 蔬菜移栽机气吹振动复合式取苗机构设计与试验[J]. 农业机械学报, 2019, 50(10): 80-87.
Yuan Ting, Wang Dong, Wen Yongshuang, et al. Design and experiment of seedlings unloading mechanism based on methods of air-blowing and vibration for vegetable transplanter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(10): 80-87.