透明薄膜柔性驱动器的研究进展
2023-04-29李志健魏小佳薛融邱宏进徐颖
李志健 魏小佳 薛融 邱宏进 徐颖
摘 要:刺激响应性柔性驱动器是近几年发展起来的新型驱动器,与传统的刚性驱动器相比,具有质轻、体积小、柔顺性好以及环境适应性强的特点,因此在健康医疗、可穿戴设备以及制造业等领域展现了巨大潜力.其中,薄膜状柔性驱动器在加工制造、定制各种复杂结构和可编程的形变能力方面具有独特优势,同时在外部刺激作用下能够表现出大形变、快速响应等优点,因而具有重要的研究价值.本文结合近年来各类刺激响应性薄膜驱动器的研究成果,重点讨论了相应的功能材料以及驱动机理,分析了在实际应用中所面临的关键技术挑战,最后对该领域未来的发展潜力以及可能性做出了展望.
关键词:刺激响应;功能材料;驱动机理;驱动器
中图分类号:TB381
文献标志码: A
文章编号:2096-398X(2023)04-0027-12
Abstract:Stimulus-responsive flexible actuators are a new type of actuator developed in recent years.Compared with the traditional rigid actuators,they have the characteristics of light weight,small size,good flexibility and strong environmental adaptability,so they show great potential in the fields of health care,wearable devices and manufacturing.Among them,the transparent thin-film flexible actuator has unique advantages in fabrication,customization of various complex geometric configurations and programmable deformation ability.At the same time,it can show the advantages of large deformation and rapid response under the action of external stimulus,so it has important research value.In this paper,based on the research results of various stimulus-responsive film actuators in recent years,the corresponding functional materials and driving mechanisms are discussed,and the key technologies and challenges faced in practical applications are analyzed.Finally,the development potentials and possibilities of this field are prospected.
Key words:stimulus-responsive;functional material;driving mechanism;actuator
0 引言
隨着科技、工业、社会各方面的进步与发展,柔性机器人备受关注[1].驱动器作为机器人产生运动的基础和重要技术之一,人们对于以柔性材料为主体的柔性驱动器的需求迅速增加[2].材料的柔顺性使柔性驱动器能够根据周围环境发生形变,进而为其提供更高的运动自由度,尤其是薄膜类器件具有柔性高、形状可塑性强、刺激响应快等一系列优点[3],因此它们更适合在复杂多变的动态或非结构环境中执行任务.此外,器件具有一定的透明度可以为其提供额外功能,如一方面能够实现有效伪装以进行秘密、安全地操作[4],另一方面便于对目标物进行观察[1],因此在战场、军事侦察或辅助可穿戴设备等方面具有潜在应用.然而传统驱动器通常是由具有一定硬度的不透明的刚性材料构成,缺乏一定的安全性、适应性和灵活性[5],因此有必要开发透明的柔性薄膜驱动器.
尽管薄膜驱动器已经得到了一定的发展,但是在如何使驱动器进行多维度响应,产生多样运动,并使其更智能化、精准化等方面缺乏系统性的讨论与研究.充分了解并掌握其中的驱动机理、控制策略对于设计具有所需结构和功能的驱动器至关重要.因此,本综述依据不同的刺激响应方式(如电、光、热、pH、湿度、磁等),分别介绍了各类透明柔性薄膜驱动器的材料选择、结构设计、驱动机理以及研究现状,并讨论了目前所面临的关键挑战,最后对未来的研究与发展进行了展望.
1 刺激响应性柔性驱动器分类
随着对智能材料研究的深入,研究者们开发了各种各样的刺激响应性智能材料,随之而产生的刺激响应性柔性驱动器亦成为研究的热点.刺激响应性柔性驱动器是指在相应刺激源(如电[6]、光[7]、热[8]、pH[9,10]、湿度[11]、磁[12]等)作用下可以产生弯曲、拉伸、膨胀、收缩、扭转、位移等一系列驱动形变的器件,因此根据刺激源的不同,柔性驱动器可分为电响应驱动器、光响应驱动器、热响应驱动器、pH响应驱动器以及湿度响应驱动器等;根据材料的不同,可分为碳基柔性驱动器、纸基柔性驱动器等;根据结构类别的不同,可分为一维纤维状驱动器[13]、二维薄膜状驱动器[14,15]、三维水凝胶状驱动器[16-19],如图1所示.其中,薄膜驱动器由于厚度较薄而具有较高的驱动效率和响应速度,因此被广泛研究.下面,本文将根据刺激源的不同对薄膜柔性驱动器进行介绍.
1.1 电刺激响应性柔性驱动器
电信号具有大小易于调节、频率选择范围广、易于控制等诸多优点而受到广泛关注[20].电响应柔性驱动依据响应机理可分为电场驱动和电热驱动,前者是在电场激发下,通过静电作用或离子迁移来引起宏观形变,目前该类柔性驱动器主要是由电活性聚合物(electroactive polymer,EAP)制备而成,而EAP可分为电子型EAP和离子型EAP,其中较具代表性的分别是介电弹性体驱动器(dielectric elastomer actuators,DEAs)和导电聚合物驱动器.电热驱动则是利用电热转换效应,将电能转换为热能使其发生非对称热膨胀,从而产生一定的驱动变形,因此通常称之为电热柔性驱动器(electrothermal actuators,ETAs),接下来对这三种驱动器分别进行介绍.
1.1.1 介电弹性体驱动器(DEAs)
DEAs是由介电弹性体(dielectric elastomer,DE)薄膜和覆盖在其两侧的柔性电极构成,如图2所示,若对柔性电极施加一定电压,DE会在平面内发生扩展,在厚度方向上发生挤压,这种机械响应主要是由电极上电荷间的相互静电力(Maxwell力)引起.一方面分布在上、下电极间的相反电荷互相吸引,产生静电引力,另一方面,同一电极内部的相同电荷互相排斥,产生静电斥力,当这种力足够大时,即可使得DE在平面内发生扩展,厚度方向产生收缩.当移除所施加的电场后,DE便又会恢复至初始状态.
DE材料的选择会直接影响驱动器各方面的性能.理想的DE材料应具有低模量、高击穿强度以及高介电常数,常见的DE材料主要有丙烯酸弹性体、硅橡胶、聚氨酯[21].
丙烯酸弹性体是一种具有良好弹性和绝缘性的透明材料,具有较高的击穿强度、能量密度并且能够表现出高达500%的大应变而不发生故障.因此,丙烯酸弹性体是制备需要输出较高应变的DEAs的首选材料[22],但其较高的粘弹性使得响应速度较慢,故通常会对丙烯酸薄膜施加一定的预拉伸并将其固定在框架上维持该预应变,使其在外场作用下,可以快速地产生大应变,从而获得更快的响应速度和更高的机电转化效率[23].Pelrine等[24]对由丙烯酸酯VHB4910制成的介电弹性体圆形薄膜施加单轴预应变,可产生高达215%的驱动应变.同样,刘立武等[25]对制备的丙烯酸薄膜驱动器进行性能测试,结果表明增加薄膜的预应变可以提高面积应变,因此施加一定的预应变,能够提升薄膜的驱动性能.
硅橡胶具有良好的透光性,并且粘弹性损耗小有着更快的响应速度和更稳定的循环稳定性.但硅橡胶是非极性聚合物,其介电常数较低,因此驱动器在工作过程中需要更高的电压来产生较高的能量密度使器件进行驱动[26].然而在实际操作中,较高的电压极其不安全.为了降低DEAs的驱动电压,可以采用减小DE薄膜厚度和提高DE介电常数的方法来实现,而最简单、直接的策略便是减小DE薄膜的厚度.Poulin等[27]使用移印工艺生产了3 μm厚的聚二甲基硅氧烷(PDMS)薄膜,由此制成的DEA在静态试验条件下,施加245 V电压时可以产生7.5%的横向驱动应变.Wiranata等[28]进一步降低DE膜厚度,使DEA能够在百伏内的电压下启动.他们使用卷对卷工艺制备了由600 nm 厚的可拉伸PDMS纳米薄膜和200 nm厚的导电纳米薄膜组成的具有一定预拉伸结构的DEA,如图3所示,其能够实现低电压操作,如在50 V的电压下可产生大约1%的驱动应变,在90 V 时产生大约2%的驱动应变.而对于介电常数的提高主要有两种措施,一是向介电弹性体基体中添加导电填料(如碳纳米管[29])或具有高介电常数的无机填料(如钛酸铜钙[30]和钛酸钡[31]);二是向介电弹性体基体引入一些极性分子(如聚乙二醇[32]、氰基[33])进行化学接枝改性,但是填料的添加以及极性分子的引入需考虑机械性能和电性能方面的变化.
聚氨酯弹性体是一种介于普通橡胶和坚硬塑料之间的高分子聚合物,是典型的嵌段共聚物.由于分子链中含有大量的极性官能团,相对介电常数远高于其他两类,通常能达到7左右,因此可应用在低电场环境中,但较高的模量会导致形变量受限[34].故对于聚氨酯类介电弹性体驱动性能的改善可以通过继续提高介电常数和降低弹性模量来实现.Renard等[35]研究了不同种类的增塑剂对热塑性聚氨酯的介电、机械以及机电驱动性能的影响,结果表明增塑剂的添加有利于在较低的电场下实现更高的驱动应变.如对于用不饱和聚酯增塑的聚氨酯,在5 V/μm的低电场驱动下可以实现1.54%的驱动应变,约为纯聚氨酯的140%倍,同时可以获得高达0.6%的机电耦合系数,表现出良好的电驱动性能.
此外,电极材料的选择也会部分影响驱动器的性能.理想的电极材料,首先应该具备高导电性,且在多次形变后依旧能够保持高导电;其次必须具备良好的柔顺性并与介电弹性体的变形程度大致等同.其中电极的柔順性是构建介电弹性体薄膜驱动器的一个重要的设计参数,因为当DEA较薄时,电极的柔顺性程度(假设电极厚度恒定)对驱动器性能的影响非常大[27].对于DEAs,常用的柔顺电极主要为石墨烯[36]、碳纳米管[37]、导电聚合物[38].
石墨烯是由单层碳原子紧密堆砌而成的二维蜂巢状纳米结构的平面薄膜,具有高导电性能、高光热转换效率、优异的机械性能以及高达97.7%的透光率[39,40].Hwang等[41]使用转移技术将少层石墨烯(few-layer-graphene,FLG)薄膜转移至介电弹性体薄膜上,由此制备了由FLG电极驱动的透明介电弹性体驱动器(如图4(a)所示),其在600 nm的波长下表现出超过57%的光学透射率.此外,研究人员进一步对驱动器的应用展开了探索,如图4(b)所示,该驱动器在电压“关闭”状态下可以清楚地观察到下方的文字,当电压打开“打开”时,由于驱动触发焦距改变,使得文字变得失焦、模糊,因此改变驱动器的电压输入,可以使其变为弯曲透镜形状,进而改变焦距,这表明该驱动器有潜力应用于光机电器件中,如透镜、传感器和触摸屏,但寿命、耐久性以及耐循环性,还需要更深入地研究.
CNT可以看作是石墨烯卷曲而成的中空状导电材料,其中单壁碳纳米管(SWCNT)具有高比表面积、高导电、透明等特点,是设计透明导电膜的理想材料.Shian等[42]分析了SWCNT作为电极的丙烯酸弹性体驱动器的光学和驱动性能,发现在最佳条件下,可以实现高达91%的光学透射率和190%的驱动应变.
导电聚合物是一类可以导电的高分子材料,常见的透明导电聚合物主要有聚苯胺(PANI)、聚吡咯(PPy)、聚3,4-乙撑二氧噻吩∶聚苯乙烯磺酸盐(PEDOT∶PSS)等,其中PEDOT∶PSS兼备良好的机械性能和高透光率,被广泛用于电子学领域中[43,44].Li等[45]将PEDOT∶PSS和水溶性聚氨酯(WPU)进行共混,制备了透明、可压缩的导电聚合物作为柔性固态电极,进而开发出同时具有200%的电压诱导面积应变和80%以上高透射率的DEAs,如图5所示.研究人员以此为基础,开发了可以在各种彩色背景下实现完美伪装的透明柔性机器人,通过改变驱动器的电压和频率,机器人能够“秘密地”进行平移和旋转,这一设计在未来战场、侦察和安全监视等领域具有一定的应用前景.
1.1.2 导电聚合物驱动器
导电聚合物是一类具有共轭π键长链结构的高分子材料,常见的导电聚合物有聚噻吩、聚乙炔、聚吡咯等.由导电聚合物构建的柔性驱动器大多具有双层结构或三层结构,其中三层结构是由两侧的导电聚合物薄膜电极层和夹在电极层之间的无电活性的聚合物电解质中间层构成.当在电极两侧施加一定电压时,会发生氧化还原的电化学过程,进而引起电解质层中离子的迁移与聚集,在宏观上则出现驱动器两侧的不对称膨胀或收缩,最终实现器件的弯曲变形[46].Wang等[47]将两层由多壁碳纳米管改性的PEDOT∶PSS电极薄膜(M-PEDOT∶PSS)与夹在中间的电解质层(热塑性聚氨酯/离子液体)通过热压法制备了具有“三明治”结构的导电聚合物驱动器.其中30%M-PEDOT∶PSS的复合电极驱动器在2.5 V直流电压作用下,可以产生1.43 mN的力学输出和15.7 mm的位移.与DEAs相比,导电聚合物驱动器的优点是微型化、驱动电壓低、生物相容性好,但缺点是输出的应力相对较小,并且大多需要在电解质环境中使用,存在一定的局限性.
1.1.3 电热柔性驱动器(ETAs)
ETAs通常是由用于电热转换的导电材料和用于驱动的热响应材料组成[48,49],其驱动的基本原理是基于不同材料间的不对称膨胀或收缩所导致的应力失配,从而宏观上表现出可逆变形或机械运动.透明的ETAs可用于实现伪装功能和不易察觉的执行系统,其应具有透明加热层和透明热响应层,从而使柔性驱动器更接近于光学不可见.
常见的透明柔性基底材料有液晶弹性体(LCE)、低密度聚乙烯(LDPE)、聚氯乙烯(PVC)、聚对苯二甲酸乙二醇酯(PET)、双轴取向聚丙烯(BOPP)等,透明柔性电热转换材料有CNT、PEDOT∶PSS、石墨烯、银纳米等.Chen等[50]展示了一种基于单层超对齐碳纳米管片和聚合物(PET和BOPP)的高性能透明柔性驱动器,该驱动器在波长为550 nm下的透射率为72%,且能够在低电压下引起大形变.利用这些优势,研究人员制作了透明雨刷和透明机器人手,这为高性能隐形机器人和其他透明智能应用的发展开辟了新方向.Mu等[51]利用“吹气球”的方法在丙烯酸薄膜上构筑了具有周期性褶皱结构的还原氧化石墨烯(RGO)功能层,得到的电热驱动薄膜在拉伸过程中表现出稳定的导电性和高达85%的透射率.如图6所示,在15 V的低电压下,该透明薄膜在3.7 MPa的拉伸应力下可以产生21%的应变.Weng等[52]提出了由透明聚合物(PET和PDMS)和单层高度取向碳纳米管(HOCNT)薄膜制成的新型低压驱动的柔性电热驱动器,如图7所示.其充分利用了HOCNT薄膜的高透明性和电导率,透射率能够高达70%,并且施加100 V的电压时,可产生曲率为0.15 cm-1,位移为14 mm的显著弯曲.
然而,电响应柔性驱动器作为透明驱动器的缺陷通常在于需要连接不透明的电线,因此难以实现无线操作和真正的透明.
1.2 光刺激响应性柔性驱动器
光具有无线远程操控、大小易于调节、绿色环保无污染等特点,因此常被用于柔性驱动器的研究中.光响应的驱动机理主要有两种:一种是光热驱动,通过光照产生热引起驱动器的形变或运动;另一种是光化学驱动,材料中的光响应基团通过光异构化或光二聚化使得分子结构发生转变,从而产生宏观的可逆变形.
1.2.1 光热柔性驱动器
光热柔性驱动器通常由柔性聚合物基体材料与光热转换材料构成,在给予一定光照时,光热转换材料将所吸收的光能转化为热能,进而基体材料因受热膨胀产生弯曲变形.常用的光热转换材料有碳基材料[53-57]、贵金属纳米材料[58,59]、染料[60,61]、半导体材料[19]等,其中碳基材料、贵金属纳米材料、染料多为有色或黑色,对于开发透明柔性驱动器不够友好,因此探索透明光热转换材料至关重要.
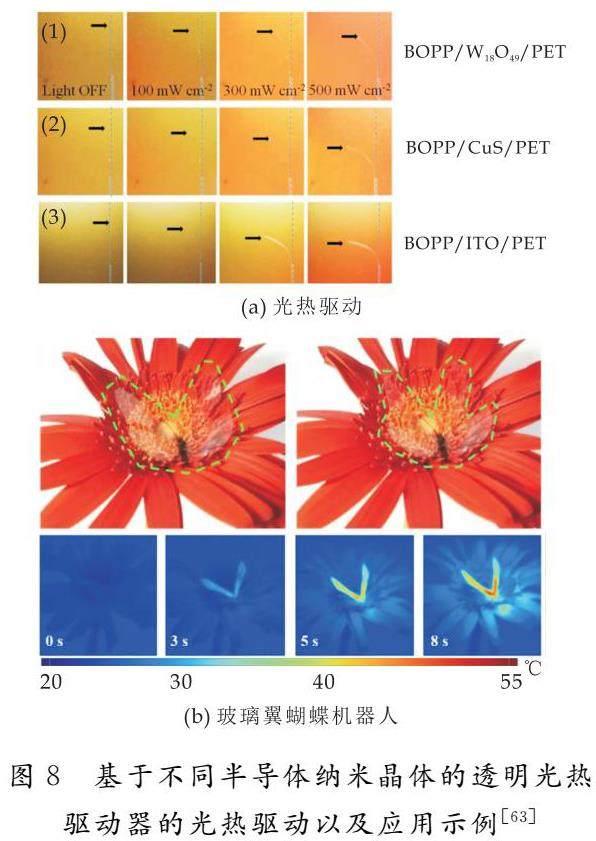
Wu等[62]使用大面积薄层石墨烯作为光热层开发了透明柔性驱动器,但薄层石墨烯存在光热转换不足的问题.Huang等[63]采用具有局部表面等离子共振效应的半导体纳米晶体In2O3∶Sn(ITO)、W18O49和CuS分别作为光热转换层,PET和BOPP作为具有不同热膨胀行为的柔性基底层,设计了三种多层柔性薄膜驱动器,如图8所示.
这些驱动器在波长为600 nm时的透射率均高于72%,并且在500 mW·cm-2的近红外光照射下可实现0.66 cm-1的弯曲.在此基础上,研究人员开发了一系列机器人,展示了这种透明柔性驱动器在远程操作和隐形伪装方面的优势.但是无机半导体材料与有机聚合物之间的相容性通常比较差,因此在设计此类驱动器时,需要考虑每层材料之间是否能够形成较强的相互作用力以维持结构的完整性和性能的稳定性.
1.2.2 光化学柔性驱动器
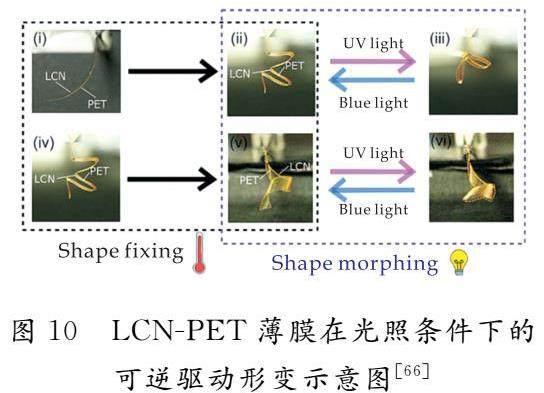
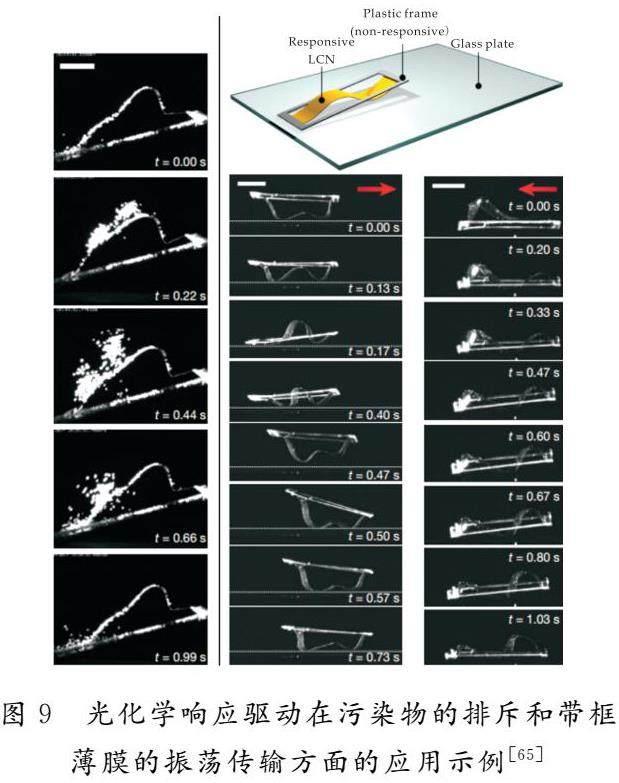
光化学柔性驱动器通常被制成单层薄膜[64],它是将偶氮苯、1,2-二芳基乙烯等光敏分子引入聚合物基体材料中得到光响应聚合物,从而制得相应的光化学驱动器.Gelebart等[65]向液晶网络(LCN)中引入能够快速发生顺式至反式构型变化的偶氮苯衍生物,从而制备了光响应聚合物薄膜.伴随着偶氮苯分子迅速、可逆的顺反构型变化,薄膜会产生连续的波动,于是该薄膜在恒定的光照下可以表现出连续、定向、宏观机械波.基于该光响应聚合物薄膜,研究人员开发了一些光响应驱动器的示例,展示了在自清洁以及小型化运输领域的潜在应用,如图9所示.Verpaalen等[66]以热塑性PET为柔性基底,在其表面喷涂掺杂有偶氮苯的液晶网络从而构筑具有形状和动作可重复编程的光驱动薄膜.该驱动薄膜的初始形状利用PET的热塑性性质进行定型,形变动作通过LCN中的偶氮苯发色团诱导产生.如图10所示,研究人员将LCN-PET薄膜塑造成不同形状,在光照条件下能够表现出良好的可逆驱动形变,这种优异的可编程性能以及驱动性能极大地拓展了它的应用潜力.
1.3 热刺激响应性柔性驱动器
根据热源的不同,热响应柔性驱动器可分为光热驱动、电热驱动和热辐射驱动[67],其中光热驱动和电热驱动前文已有所介绍,在此不再赘述.热辐射驱动主要基于热响应材料,其中研究最广泛的是聚N-异丙基丙烯酰胺(PNIPAM).PNIPAM的相转变温度约为32 ℃,当温度低于32 ℃时,PNIPAM分子链处于伸展状态,体积膨胀,超过32 ℃时,分子链蜷缩,体积缩小,由此可表现出宏观形变.Xu等[68]使用聚多巴胺(PD)对单层石墨烯表面进行修饰获得一定的反应活性,进而通过表面接枝法引发N-异丙基丙烯酰胺单体在膜表面聚合,由此得到具有热响应性的3D石墨烯(G-PD-PNIPAM),如图11(a)所示.紧接着研究人员对所制备的石墨烯进行了图案化,如图11(b)所示,当温度升高到45 ℃左右时,图案化的石墨烯“花”的花瓣会向中心折叠由开放状态变为闭合状态,当温度由45 ℃降低至25 ℃时,石墨烯“花”的花瓣会展开,同时由于G-PD-PNIPAM具有良好的生物相容性,因此这种自折叠过程对于药物封装和传送以及生物捕获具有重要意义.
1.4 pH刺激响应性柔性驱动器
pH响应柔性驱动器是通过在基材表面引入对pH敏感的基团(通常是酸、碱性基团,最常见的是羧酸和吡啶基团)来制备.当外界环境中的pH值发生改变时会引起基团质子化程度的改变,从而导致材料自身的收缩和溶胀,因此驱动器会产生变形[69].pH响应柔性驱动器主要应用在药物控制释放、过滤膜等领域[70].De等[71]使用含有内部氢键的反应性介晶混合物制备了具有指向矢变化的图案化液晶薄膜驱动器,这主要是利用液晶分子取向的不同,以使材料产生各向异性的收缩或膨胀.如图12所示,当pH升高至11.4时,网络内部的氢键转化为羧酸盐,产生各向异性膨胀,并观察到薄膜变为手风琴形状,当pH降低至2.3时,薄膜会恢复原有形状,该驱动器可应用于微流体系统或精确复杂的医疗系统中.Chemin等[69]受植物中纤维素各向异性排列促使植物产生运动的启发,制备了纳米原纤化纤维素的纳米纸,其带电基团沿膜厚度方向具有一定的浓度梯度,当pH发生变化时,两侧的质子化程度不同,从而产生不对称膨胀.虽然pH响应柔性驱动器种类较多,但大多数的响应速度较慢,且多适用于液体环境中,因此要想得到产业化的生产及应用还需要不断地完善及改进[72,73].
1.5 湿度刺激响应性柔性驱动器
湿度响应柔性驱动器中常用的湿度响应材料可分为碳基和聚合物基两大类,这些材料通常含有亲水基团,如羟基、氨基、羧基或吡咯基[74,75]等,在湿气的刺激下,易与水分子发生相互作用,从而产生尺寸或形状上的宏观形变[76].
碳基材料中最常用的湿度响应材料为氧化石墨烯(GO).GO是最重要的石墨烯衍生物之一,表面丰富的含氧官能团使其能够快速地吸附/解吸水分子进而改变其体积[77,78],因此在湿度响应柔性驱动器中应用较为广泛[79,80].GO基湿度响应柔性驱动器的结构设计思路通常有两种,一种是由GO和与GO湿度敏感度不同的柔性材料(如RGO[81]、PDMS和CNT[82]等)组成的双层结构,由于二者对湿度的敏感度不同从而实现驱动;另一种是由氧化石墨烯形成的单层膜结构,但需在一侧引入微結构[83],从而由膜两侧的不对称性实现驱动,或者是均质的单层膜结构,使其处于一定的湿度梯度环境中产生驱动.
聚合物基材料可分为天然聚合物及其衍生物和合成聚合物.在天然聚合物中,常用的湿度响应材料有纤维素[84]、琼脂糖[85]、壳聚糖[86]等.在合成聚合物中,常用的湿度响应材料为含有亲水基团的水凝胶[87]、液晶聚合物[88]等.Lv等[89]以聚乙二醇二丙烯酸酯(PEG-DA)为单体,采用紫外光聚合法制备了具有一定透明度的湿度响应PEG-DA水凝胶薄膜驱动器.如图13所示,该薄膜在较小的湿度梯度下可以自发地产生变形和运动,如若将其放于湿润的滤纸表面,PEG-DA膜会自发地连续翻转;若将其置于手掌心,薄膜会向上弯曲.基于该薄膜,作者设计了一种爬行速度约为3 mm/min的爬行装置,这种湿度响应的爬行装置能够模仿肌肉的运动和蠕虫的爬行,因此在柔性机器人领域可能会有一定应用.Zhang等[90]报告了一种化学键合的海藻酸钠/聚偏氟乙烯(SA/PVDF)双层薄膜驱动器,其中SA是亲水层,对湿度高度敏感,PVDF是疏水层,对湿度呈现惰性,因此在湿度作用下可表现出非对称膨胀.为了精确控制并调节薄膜的响应形变,研究人员将吸附有Ca2+的滤纸按照一定的排列方式覆盖在SA表面,使Ca2+与SA中的羧基发生交联,从而在薄膜表面形成图案化交联.图案化交联会赋予差异化的湿度响应,因此薄膜便表现出卷曲、螺旋等复杂变形,如图14所示,将长轴垂直于交联图案方向的薄膜暴露于湿气时,薄膜会向PVDF层弯曲;将其置于阳光下时,脱水加速,薄膜会向SA层弯曲.需注意,薄膜表面周期性的交联/非交联图案使得弯曲并不平滑,而是不规则的弯曲,这种图案化交联为驱动器的设计提供了思路.
1.6 磁刺激响应性柔性驱动器
磁刺激响应柔性驱动器是将磁性粒子分散到柔性聚合物基质中构建而成.在外加磁场作用下,基体中的磁性粒子会沿磁场方向发生定向排列,宏观上表现出弯曲、伸长、扭转等一系列动作.与光、热等其他刺激源不同,磁场具有极强的穿透力,可以穿过大部分材料,并且能够实现远程无线操控,因此在封闭或狭小空间中具有广泛的应用前景.然而,受限于嵌入的大量不透明的磁性粒子,驱动器通常表现出深色甚至黑色,难以识别驱动器下方的物体和背景.Li等[91]构建了一种具有微节点阵列的透明磁性微型驱动器.如图15所示,由于驱动器采用了高透明度的主体材料以及微节点设计,因此可以实现约为80%的高透射率,具有一定的伪装能力.此外,该驱动器能够以0.22 mm/s的速度越过高度为1 mm的障碍物,具有一定的移动和越障能力.这项研究在战场、环境侦察、生物医疗等领域具有较大的应用前景,同时也为透明磁响应柔性驱动器的设计提供了新思路.
1.7 多重刺激响应性柔性驱动器
智能材料的多响应性能够赋予驱动器更多的性能,这一特性有望使其在不同的使用环境中产生驱动,从而拓宽其应用范围.Pilz等[92]报道了一种由含偶氮苯的液晶聚合物膜和含羰基铁粉的PDMS层构成的磁光双重响应柔性驱动器.该柔性驱动器能够在光照和磁场作用下分别触发薄膜产生不同的机械响应,如在光照作用下,薄膜驱动器可以实现抓取或释放物体,在磁场作用下,可以进行平移或旋转.基于这种双重响应,驱动器可用于执行远程控制类任务,如图16所示,研究人员设计了一种柔性抓手,能够实现抓取、运输和释放等多种功能.Liang等[93]首先利用预先设计的二氧化硅模板制备了单侧具有微通道图案化的PVDF薄膜,然后在微通道图案侧用吸湿性的3-氨丙基三乙氧基硅烷(APTES)对PVDF进行改性,从而得到对热、湿度以及丙酮蒸汽具有良好响应的多重刺激响应性薄膜.在此基础上,研究人员展示了该薄膜在驱动系统方面的潜在应用,如图17所示,采用PVDF/APTES材料设计的柔性抓手能够以高度可控的方式将湿度和热量转化为机械功从而抓取0.8 g的轻型物体,此外该驱动材料还被制作成爬行机器人,其在湿度和热量的驱动下能够以0.01 cm/s的速度模拟爬行运动.
2 关键技术与挑战
当前报道的一些柔性驱动器已能够初步实现对外界环境刺激的响应性驱动行为,但要满足薄膜柔性驱动器的高性能还有一定距离,目前所面临的挑战主要包含以下三方面:
(1)刺激源单一.现已报道的大多数刺激响应柔性薄膜驱动器只能对一种或两种刺激源产生响应,因此制备同时具有多重刺激响应性能的薄膜驱动器仍是个巨大的挑战.同时在实际环境中大多是由多种因素共同作用,因此可以将具有不同刺激响应性的材料进行复合或在某种刺激响应性材料上化学接枝其他敏感性基团,使柔性薄膜具有多重刺激响应,从而赋予驱动器更强的环境适应能力[54,82,93].此外,在多重响应系统中,不同响应之间是否存在相互作用也是目前需要关注的方向之一[94].
(2)形变方式单一且可控性差.目前,薄膜驱动器的响应仍是以简单的弯曲、平移、旋转等运动为主,运动形式单一、可控性较差.因此,为了使柔性薄膜在刺激源作用下能够实现复杂可控的响应动力学,可以利用结构梯度化或各种常见的平面图案化工艺构筑薄膜的各向异性,以实现复杂快速的定向驱动[93,95].
(3)器件集成與多功能化.薄膜驱动器在驱动变形过程中缺少实时反馈,无法实现自调节、自适应.而薄膜类柔性传感器的快速发展恰好为这一问题的解决提供了思路,因此可以通过在驱动器上集成传感器件,以用于感知并实时反应驱动器的形变程度[6,96,97],甚至依据反馈信号调整和控制驱动器.驱动与传感的集成设计是实现柔性薄膜驱动器多功能化、智能化的研究目标之一,同时这一技术的应用也将为未来可穿戴设备提供新的功能与体验.
因此,针对刺激响应性柔性薄膜驱动器中结构的优化设计、刺激驱动的可控性、多功能化等问题的有效解决十分必要.
3 总结与展望
刺激响应性薄膜驱动器具有体积小、可远程控制以及能够实现快速变形等独特优势,因此在狭小的空间环境,如微流体通道中有很好的应用,此外在柔性夹持器、爬行机器人、水下机器人等方面也取得了一定的研究进展.同时得益于薄膜质轻、灵活性好、功能多样化,故可将其应用于新一代可穿戴设备中,但在薄膜驱动器的研究中,仍然存在一些挑战,例如薄膜驱动器多以单层薄膜或双层薄膜组成,其简单的平面几何结构在一定程度上会限制运动形式的多样化以及器件的高度集成.总之,对于这类柔性驱动器的研究还处于萌芽阶段,依旧有多个关键技术亟待解决,因此离薄膜驱动器实现规模化生产和实际应用还有一段距离.
未来刺激响应性薄膜驱动器的研究一定会向着多学科交叉、协作、融合的方向发展,利用各学科的前沿成果使其更精确化、智能化.届时,刺激响应性薄膜驱动器也将形成一套完善的理论体系并在各类工程、医疗、军事等领域发挥重要作用.
参考文献
[1] Lee H,Kim H,Ha I,et al.Directional shape morphing transparent walking soft robot[J].Soft Robotics,2019,6(6):760-767.
[2] Kim J,Kim J W,Kim H C,et al.Review of soft actuator materials[J].International Journal of Precision Engineering and Manufacturing,2019,20(12):2 221-2 241.
[3] Jin X,Shi Y,Yuan Z,et al.Bio-inspired soft actuator with contact feedback based on photothermal effect and triboelectric nanogenerator[J].Nano Energy,2022,99:107 366.
[4] Won P,Kim K K,Kim H,et al.Transparent soft actuators/sensors and camouflage skins for imperceptible soft robotics[J].Advanced Materials,2021,33(19):2 002 397.
[5] Lu F,Chen T,Xiang K,et al.Ionic electro-active polymer actuator based on cobalt-containing nitrogen-doped carbon/conducting polymer soft electrode[J].Polymer Testing,2020,84:106 413.
[6] Cheng H,Zhao F,Xue J,et al.One single graphene oxide film for responsive actuation[J].ACS Nano,2016,10(10):9 529-9 535.
[7] Chen J,Leung F K C,Stuart M C A,et al.Artificial musc-le-like function from hierarchical supramolecular assembly of photoresponsive molecular motors[J].Nature Chemistry,2018,10(2):132-138.
[8] Yang Y,Terentjev E M,Zhang Y,et al.Reprocessable thermoset soft actuators[J].Angewandte Chemie International Edition,2019,58(48):17 474-17 479.
[9] Gao T,Xu G,Wen Y,et al.An intelligent film actuator with multi-level deformation behaviour[J].Nanoscale Horizons,2020,5(8):1 226-1 232.
[10] Zhang Y,Liao J,Wang T,et al.Polyampholyte hydrogels with pH modulated shape memory and spontaneous actuation[J].Advanced Functional Materials,2018,28(18):1 707 245.
[11] Arazoe H,Miyajima D,Akaike K,et al.An autonomous actuator driven by fluctuations in ambient humidity[J].Nature Materials,2016,15(10):1 084-1 089.
[12] Alapan Y,Karacakol A C,Guzelhan S N,et al.Reprogrammable shape morphing of magnetic soft machines[J].Science Advances,2020,6(38):eabc6 414.
[13] Shi Q,Li J,Hou C,et al.A remote controllable fiber-type near-infrared light-responsive actuator[J].Chemical Communications,2017,53(81):11 118-11 121.
[14] Jing Y,Shi Q,Hou C,et al.Carbon-based thin-film actuator with 1D to 2D transitional structure applied in smart clothing[J].Carbon,2020,168:546-552.
[15] Xiao X,Ma H,Zhang X.Flexible photodriven actuator based on gradient-paraffin-wax-filled Ti3C2Tx MXene film for bionic robots[J].ACS Nano,2021,15(8):12 826-12 835.
[16] Zhao Y,Lo C Y,Ruan L,et al.Somatosensory actuator based on stretchable conductive photothermally responsive hydrogel[J].Science Robotics,2021,6(53):eabd5 483.
[17] Chen Z,Chen Y,Chen C,et al.Dual-gradient PNIPAM-based hydrogel capable of rapid response and tunable actuation[J].Chemical Engineering Journal,2021,424:130 562.
[18] Li H,Liang Y,Gao G,et al.Asymmetric bilayer CNTs-elast-omer/hydrogel composite as soft actuators with sensing perfo-rmance[J].Chemical Engineering Journal,2021,415:128 988.
[19] Sun Z,Wei C,Liu W,et al.Two-dimensional MoO2 nanosheet composite hydrogels with high transmittance and excellent photothermal property for near-infrared responsive actuators and microvalves[J].ACS Applied Materials & Interfaces,2021,13(28):33 404-33 416.
[20] 王 文.环境刺激响应性柔性驱动器的设计制备及其应用研究[D].上海:东华大学,2020.
[21] 刘若男.丙烯酸树脂弹性体复合薄膜的介电及电驱动性能研究[D].南京:南京航空航天大学,2014.
[22] Michel S,Zhang X Q,Wissler M,et al.A comparison between silicone and acrylic elastomers as dielectric materials in electroactive polymer actuators[J].Polymer International,2010,59(3):391-399.
[23] Zhu L,Zhu X,Shiju E,et al.Research on output performance of dielectric elastomer actuators[C]//International Conference on Computer,Mechatronics,Control and Electronic Engineering.Changchun:IEEE Publishing,2010:168-171.
[24] Pelrine R,Kornbluh R,Pei Q,et al.High-speed electrically actuated elastomers with strain greater than 100%[J].Science,2000,287(5 454):836-839.
[25] 劉立武,张 震,刘彦菊,等.介电弹性体薄膜驱动器的驱动性能研究[C]//第十五届全国复合材料学术会议论文集(上册).哈尔滨:国防工业出版社,2008:74-78.
[26] 刘立武,李金嵘,吕雄飞,等.电活性介电弹性体的本构理论和稳定性研究进展[J].中国科学(技术科学),2015,45(5):450-463.
[27] Poulin A,Rosset S,Shea H R.Printing low-voltage dielectric elastomer actuators[J].Applied Physics Letters,2015,107(24):244 104.
[28] Wiranata A,Kanno M,Chiya N,et al.High-frequency,low-voltage oscillations of dielectric elastomer actuators[J].Applied Physics Express,2021,15(1):011 002.
[29] Goswami K,Daugaard A E,Skov A L.Dielectric properties of ultraviolet cured poly(dimethyl siloxane) sub-percolative composites containing percolative amounts of multi-walled carbon nanotubes[J].RSC Advances,2015,5(17):12 792-12 799.
[30] Zhang L,Shan X,Bass P,et al.Process and microstructure to achieve ultra-high dielectric constant in ceramic-polymer composites[J].Scientific Reports,2016,6(1):1-10.
[31] Zhang Z,Liu L,Fan J,et al.New silicone dielectric elastomers with a high dielectric constant[C]//Modeling,Signal Processing,and Control for Smart Structures.San Diego:SPIE Publishing,2008:271-278.
[32] Razak A H A,Szabo P,Skov A L.Enhancement of dielectric permittivity by incorporating PDMS-PEG multiblock copoly-mers in silicone elastomers[J].RSC Advances,2015,5(65):53 054-53 062.
[33] Racles C,Cazacu M,Fischer B,et al.Synthesis and charact-erization of silicones containing cyanopropyl groups and their use in dielectric elastomer actuators[J].Smart Materials and Structures,2013,22(10):104 004.
[34] Guo Y,Liu L,Liu Y,et al.Review of dielectric elastomer actuators and their applications in soft robots[J].Advanced Intelligent Systems,2021,3(10):2 000 282.
[35] Renard C,Wang D,Yang Y,et al.Plasticized thermoplastic polyurethanes for dielectric elastomers with improved electro-mechanical actuation[J].Journal of Applied Polymer Science,2017,134(30):45 123.
[36] Shin K Y,Hong J Y,Jang J.Flexible and transparent graphene films as acoustic actuator electrodes using inkjet printing[J].Chemical Communications,2011,47(30):8 527-8 529.
[37] Kumar V,Lee G,Singh K,et al.Structure-property relations-hip in silicone rubber nanocomposites reinforced with carbon nanomaterials for sensors and actuators[J].Sensors and Actuators A:Physical,2020,303:111 712.
[38] Ouyang J.Application of intrinsically conducting polymers in flexible electronics[J].Smart Mat,2021,2(3):263-285.
[39] Peres N M R,Guinea F,Neto A H C.Electronic properties of two-dimensional carbon[J].Annals of Physics,2006,321(7):1 559-1 567.
[40] Gusynin V P,Sharapov S G,Carbotte J P.Unusual microwave response of dirac quasiparticles in graphene[J].Physical Review Letters,2006,96(25):256 802.
[41] Hwang T,Kwon H Y,Oh J S,et al.Transparent actuator made with few layer graphene electrode and dielectric elastomer,for variable focus lens[J].Applied Physics Letters,2013,103(2):023 106.
[42] Shian S,Diebold R M,Mc Namara A,et al.Highly compliant transparent electrodes[J].Applied Physics Letters,2012,101(6):061 101.
[43] Won Y,Lee J J,Shin J,et al.Biocompatible,transparent,and high-areal-coverage kirigami PEDOT:PSS electrodes for electrooculography-derived human-machine interactions[J].ACS Sensors,2021,6(3):967-975.
[44] Lu B,Yuk H,Lin S,et al.Pure PEDOT:PSS hydrogels[J].Nature Communications,2019,10(1):1 043.
[45] Li P,Wang Y,Gupta U,et al.Transparent soft robots for effective camouflage[J].Advanced Functional Materials,2019,29(37):1 901 908.
[46] Yang Y,Wu Y,Li C,et al.Flexible actuators for soft robotics[J].Advanced Intelligent Systems,2020,2(1):1 900 077.
[47] Wang D,Lu C,Zhao J,et al.High energy conversion efficiency conducting polymer actuators based on PEDOT:PSS/MWCNTs composite electrode[J].RSC Advances,2017,7(50):31 264-31 271.
[48] Ji Y,Xing Y,Li X,et al.Dual-stimuli responsive carbon nanotube sponge-PDMS amphibious actuator[J].Nanomaterials,2019,9(12):1 704.
[49] Zhao H,Hu R,Li P,et al.Soft bimorph actuator with real-time multiplex motion perception[J].Nano Energy,2020,76:104 926.
[50] Chen L,Weng M,Zhang W,et al.Transparent actuators and robots based on single-layer superaligned carbon nanotube sheet and polymer composites[J].Nanoscale,2016,8(12):6 877-6 883.
[51] Mu J,Hou C,Wang G,et al.An elastic transparent conductor based on hierarchically wrinkled reduced graphene oxide for artificial muscles and sensors[J].Advanced Materials,2016,28(43):9 491-9 497.
[52] Weng M,Chen L,Huang F,et al.Transparent actuator made by highly-oriented carbon nanotube film for bio-inspired optical systems[J].Nanotechnology,2020,31(6):065 501.
[53] Tang R,Sang W,Wu Y,et al.Multi-wavelength light drivab-le oscillatory actuator on graphene-based bilayer film[J].Macromolecular Materials and Engineering,2017,302(2):1 600 384.
[54] Zhang W,Wang L,Sun K,et al.Graphene-based Janus film with improved sensitive response capacity for smart actuators[J].Sensors and Actuators B:Chemical,2018,268:421-429.
[55] Li L,Meng J,Hou C,et al.Dual-mechanism and multimotion soft actuators based on commercial plastic film[J].ACS Applied Materials & Interfaces,2018,10(17):15 122-15 128.
[56] Zhou P,Chen L,Yao L,et al.Humidity-and light-driven actuators based on carbon nanotube-coated paper and polymer composite[J].Nanoscale,2018,10(18):8 422-8 427.
[57] Huang Y,Su C,Yu Q,et al.Carbon-based photo-thermal re-sponsive film actuators with a sandwich structure for soft robots[J].Journal of Science:Advanced Materials and Devices,2022,7(1):100 412.
[58] Guo Q,Bishop C J,Meyer R A,et al.Entanglement-based thermoplastic shape memory polymeric particles with photo-thermal actuation for biomedical applications[J].ACS Applied Materials & Interfaces,2018,10(16):13 333-13 341.
[59] Toncheva A,Khelifa F,Paint Y,et al.Fast IR-actuated shape-memory polymers using in situ silver nanoparticle-grafted cellulose nanocrystals[J].ACS Applied Materials & Interfaces,2018,10(35):29 933-29 942.
[60] Ge F,Yang R,Tong X,et al.A multifunctional dye-doped liquid crystal polymer actuator:Light-guided transportation,turning in locomotion,and autonomous motion[J].Angewandte Chemie,2018,130(36):11 932-11 937.
[61] Guo L X,Liu M H,Sayed S M,et al.A calamitic mesogenic near-infrared absorbing croconaine dye/liquid crystalline elastomer composite[J].Chemical Science,2016,7(7):4 400-4 406.
[62] Wu C,Feng J,Peng L,et al.Large-area graphene realizing ultrasensitive photothermal actuator with high transparency:New prototype robotic motions under infrared-light stimuli[J].Journal of Materials Chemistry,2011,21(46):18 584-18 591.
[63] Huang F,Weng M,Feng Z,et al.Transparent photoactuators based on localized-surface-plasmon-resonant semiconductor nanocrystals:A platform for camouflage soft robots[J].Nanoscale,2020,12(22):11 878-11 886.
[64] Li J,Zhou X,Liu Z.Recent advances in photoactuators and their applications in intelligent bionic movements[J].Advanced Optical Materials,2020,8(18):2 000 886.
[65] Gelebart A H,Jan Mulder D,Varga M,et al.Making waves in a photoactive polymer film[J].Nature,2017,546(7 660):632-636.
[66] Verpaalen R C P,Pilz Da Cunha M,Engels T A P,et al.Liquid crystal networks on thermoplastics:Reprogrammable photo-responsive actuators[J].Angewandte Chemie International Edition,2020,59(11):4 532-4 536.
[67] Hines L,Petersen K,Lum G Z,et al.Soft actuators for small-scale robotics[J].Advanced Materials,2017,29(13):1 603 483.
[68] Xu W,Qin Z,Chen C T,et al.Ultrathin thermoresponsive self-folding 3D graphene[J].Science Advances,2017,3(10):e1 701 084.
[69] Chemin M,Beaumal B,Cathala B,et al.pH-responsive properties of asymmetric nanopapers of nanofibrillated cellulose[J].Nanomaterials,2020,10(7):1 380.
[70] Yamazaki N,Sugimoto T,Fukushima M,et al.Dual-stimuli responsive liposomes using pH-and temperature-sensitive polymers for controlled transdermal delivery[J].Polymer Chemistry,2017,8(9):1 507-1 518.
[71] De Haan L T,Gimenez Pinto V,Konya A,et al.Accordion-like actuators of multiple 3D patterned liquid crystal polymer films[J].Advanced Functional Materials,2014,24(9):1 251-1 258.
[72] Dai L,Ma M,Xu J,et al.All-lignin-based hydrogel with fast pH-stimuli responsiveness for mechanical switching and actuation[J].Chemistry of Materials,2020,32(10):4 324-4 330.
[73] Meng H,Zheng J,Wen X,et al.PH-and sugar-induced shape memory hydrogel based on reversible phenylboronic acid-diol ester bonds[J].Macromolecular Rapid Communications,2015,36(6):533-537.
[74] Zhang L,Liang H,Jacob J,et al.Photogated humidity-driven motility[J].Nature Communications,2015,6(1):1-12.
[75] Qiu X,Liang S,Huang X,et al.Prepatterning and post-oxi-dation-crosslinking of Fe(0) particles for a humidity-sensing actuator[J].Chemical Communications,2019,55(100):15 049-15 052.
[76] Tan H,Yu X,Tu Y,et al.Humidity-driven soft actuator built up layer-by-layer and theoretical insight into its mechanism of energy conversion[J].The Journal of Physical Chemistry Letters,2019,10(18):5 542-5 551.
[77] Buchsteiner A,Lerf A,Pieper J.Water dynamics in graphite oxide investigated with neutron scattering[J].The Journal of Physical Chemistry B,2006,110(45):22 328-22 338.
[78] Zhu J,Andres C M,Xu J,et al.Pseudonegative thermal expansion and the state of water in graphene oxide layered assemblies[J].Acs Nano,2012,6(9):8 357-8 365.
[79] Mu J,Hou C,Zhu B,et al.A multi-responsive water-driven actuator with instant and powerful performance for versatile applications[J].Scientific Reports,2015,5(1):1-7.
[80] Han D D,Zhang Y L,Liu Y,et al.Bioinspired graphene actuators prepared by unilateral UV irradiation of graphene oxide papers[J].Advanced Functional Materials,2015,25(28):4 548-4 557.
[81] Xu G,Chen J,Zhang M,et al.An ultrasensitive moisture driven actuator based on small flakes of graphene oxide[J].Sensors and Actuators B:Chemical,2017,242:418-422.
[82] Wang W,Xiang C,Zhu Q,et al.Multi-stimulus responsive actuator with GO and carbon nanotube/PDMS bilayer structure for flexible and smart devices[J].ACS Applied Materials & Interfaces,2018,10(32):27 215-27 223.
[83] Wang M,Li Q,Shi J,et al.Bio-inspired high sensitivity of moisture-mechanical GO films with period-gradient structures[J].ACS Applied Materials & Interfaces,2020,12(29):33 104-33 112.
[84] Jiang X,Tian B,Xuan X,et al.Cellulose membranes as moisture-driven actuators with predetermined deformations and high load uptake[J].International Journal of Smart and Nano Materials,2021,12(2):146-156.
[85] Zhang L,Naumov P.Light and humidity-induced motion of an acidochromic film[J].Angewandte Chemie International Edition,2015,54(30):8 642-8 647.
[86] Xu H,Xu X,Xu J,et al.An ultra-large deformation bidirectional actuator based on a carbon nanotube/PDMS composite and a chitosan film[J].Journal of Materials Chemistry B,2019,7(47):7 558-7 565.
[87] Boothby J M,Ware T H.Dual-responsive,shape-switching bilayers enabled by liquid crystal elastomers[J].Soft Matter,2017,13(24):4 349-4 356.
[88] Wani O M,Verpaalen R,Zeng H,et al.An artificial nocturnal flower via humidity-gated photoactuation in liquid crystal networks[J].Advanced Materials,2019,31(2):1 805 985.
[89] Lv C,Xia H,Shi Q,et al.Sensitively humidity-driven actuator based on photopolymerizable PEG-DA films[J].Advanced Materials Interfaces,2017,4(9):1 601 002.
[90] Zhang L,Qiu X,Yuan Y,et al.Humidity and sunlight-driven motion of a chemically bonded polymer bilayer with progra-mmable surface patterns[J].ACS Applied Materials & Interfaces,2017,9(47):41 599-41 606.
[91] Li G,Zhang T,Shen Y.Transparent magnetic soft millirobot actuated by micro-node array[J].Advanced Materials Technologies,2021,6(8):2 100 131.
[92] Pilz Da Cunha M,Foelen Y,Van Raak R J H,et al.An un-tethered magnetic and light-responsive rotary gripper:Shedding light on photoresponsive liquid crystal actuators[J].Advanced Optical Materials,2019,7(7):1 801 643.
[93] Liang S,Qiu X,Yuan J,et al.Multi-responsive kinematics and robotics of surface-patterned polymer film[J].ACS Applied Materials & Interfaces,2018,10(22):19 123-19 132.
[94] Lan R,Sun J,Shen C,et al.Reversibly and irreversibly humidity-responsive motion of liquid crystalline network gated by SO2 gas[J].Advanced Functional Materials,2019,29(23):1 900 013.
[95] Pozo M,Sol J A H P,Van Uden S H P,et al.Patterned actuators via direct ink writing of liquid crystals[J].ACS Applied Materials & Interfaces,2021,13(49):59 381-59 391.
[96] Zhao T,Liu H,Yuan L,et al.A multi-responsive MXene-based actuator with integrated sensing function[J].Advanced Materials Interfaces,2022,9(10):2 101 948.
[97] Chen L,Weng M,Zhou P,et al.Graphene-based actuator with integrated-sensing function[J].Advanced Functional Materials,2019,29(5):1 806 057.
【責任编辑:陈 佳】
基金项目:陕西科技大学自然科学预研基金项目(2018BF51)
作者简介:李志健(1964—),男,陕西蓝田人,教授,博士生导师,研究方向:纸基材料生物信息功能化