一种针对异构设备和环境变化的室内定位算法
2023-04-29孙顺远于敬源
孙顺远 于敬源
摘要: 针对基于蓝牙指纹的室内定位中存在设备异构性和蓝牙信标节点发生变化的问题, 提出一种针对异构设备和环境变化的室内定位算法. 首先, 利用普氏分析法对接收到的信号强度进行标准化处理, 使用核极限学习机(kernel extreme learning machine, KELM)对标准化的指纹库建模, 减少用户移动终端差异导致的信号强度差异; 其次, 当接入点(access point, AP)信号发生变化时, 利用高斯过程回归重新校准该接入点信号, 更新指纹库, 消除接入点因信号衰弱、 位置移动或环境变化导致的定位误差. 测试分析结果表明: 该算法能有效克服异构设备产生的影响, 并更好地适应环境变化.
关键词: 室内定位; 普氏分析法; 异构设备; 环境变化; 高斯过程回归
中图分类号: TP393 文献标志码: A 文章编号: 1671-5489(2023)04-0915-07
An Indoor Location Algorithm for HeterogeneousDevices and Environmental Changes
SUN Shunyuan, YU Jingyuan
(Key Laboratory of Advanced Process Control for Light Industry of Ministry of Education,
School of Internet of Things Engineering, Jiangnan University, Wuxi 214122, Jiangsu Province, China)
Abstract: Aiming at the problem of equipment heterogeneity and the change of Bluetooth beacon nodes in indoor location based on Bluetooth fingerprint, we proposed an indoor location algorithm for heterogeneous devices and environmental changes. Firstly, we used Procrustes analysis method to standardize the received signal strength, and used kernel extreme learning machine (KELM) to model the standardized fingerprint database to reduce the signal strength differences caused by the differences of users mobile terminals. Secondly, when the access point (AP) signal changed, the access point signal was recalibrated by Gaussian process regression (GPR), and the fingerprint database was updated to eliminate the positioning error caused by the weak signal, position movement or environmental change of the access point. Test analysis results show that the algorithm can effectively overcome the impact of heterogeneous equipment, and better adapt to the environmental changes.
Keywords: indoor location; Procrustes analysis method; heterogeneous equipment; environmental change; Gaussian process regression (GPR)
近年來, 随着移动设备的爆炸式增长和社交网络的普及, 人们对位置服务(location based services, LBS)的需求不断增大[1]. 全球定位系统(global positioning system, GPS)广泛应用在室外定位中, 但由于卫星与室内接收器之间缺乏视距传输通道, 因此无法在室内环境中提供足够精确的定位服务[2]. 蓝牙[3]和WiFi[4-5]等技术的迅速发展以及智能手机的不断更新, 使基于信号接收强度(received signal strength, RSS)指纹的室内定位技术逐渐兴起[6-10]. 在测试设备与参考设备相同且环境相同的情况下, 指纹识别的方法可取得较高的定位精度, 但使用异构设备或接入点发生变化时, 会产生较大误差[11-12]. 因此, 本文主要考虑如何克服设备异构性的影响、 自适应接入点(access point, AP)信号变化.
为解决室内定位中设备异构的问题, 目前已有许多方法可提升定位的鲁棒性. 文献[13]通过线性变换的方法手动调整不同测试设备的RSS值, 该方法需提前获知异构设备的设备类型, 以便进行离线回归, 自动化程度较低, 同时, 简单的线性关系并不能有效表征异构设备之间的差异; 文献[14]提出了使用信号强度差(signal strength difference, SSD)代替RSS作为指纹, 以避免繁琐的手动RSS校准程序, 该方法虽然可以减少异构设备的影响, 但也减少了指纹特征; 文献[15]提出了基于普氏分析对信号强度指纹进行标准化, 并定义信号趋势指数度量这些标准化指纹之间的相似性, 然后采用加权平均构建出新的测试指纹, 该方法能有效克服异构设备产生的影响, 但无法解决AP变化产生的影响; 文献[16]提出了采用高斯过程回归(Gaussian process regression, GPR)的方法更新参考点(reference point, RP)指纹, 可以在目标区域的任意位置使用GPR调整指纹库以适应AP变化, 更新指纹数据库.
综合上述方法的优缺点, 本文提出一种基于普氏分析和GPR的指纹库自适应算法. 在目标区域中各RP处采集蓝牙RSS指纹, 使用普氏分析对指纹库进行标准化处理, 然后将标准化后的数据输入极限学习机建立定位模型; 当AP发生改变时, 使用GPR重新构建指纹库, 以适应环境变化.
1 定位模型的构建
3 实验分析
3.1 实验设置
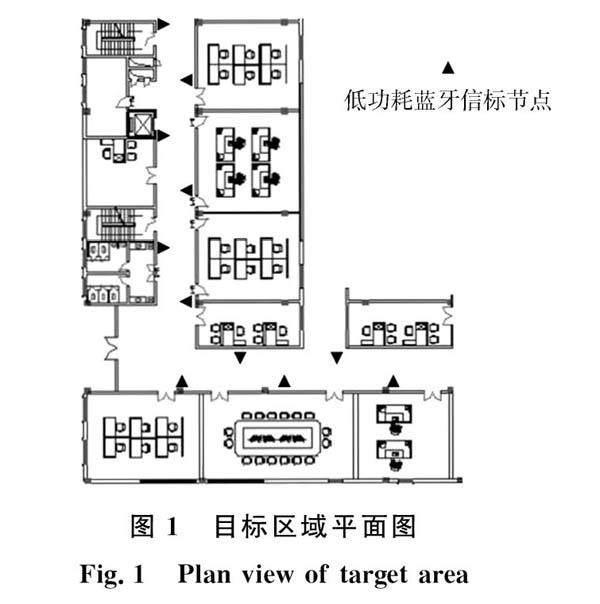
实验场景为江南大学物联网工程学院C区一楼“L”型走廊区域, 以区域相邻的两边为横纵坐标轴, 并标记为x轴和y轴. 该区域可视为由两个大小不等的矩形区域组成, 其大小分别为30 m×2 m和20 m×2 m, 如图1所示. 根据实验测得的蓝牙信号衰减趋势, 在这两个连通的矩形走廊区域中每隔4 m布置一个低功耗蓝牙信标节点, 共11个节点, 即为AP点. 该AP点采用以NRF52832芯片作为核心的低功耗蓝牙信标, 主要实现了广播功能, 不停地向外发送数据. RP位置的选取主要采用网格拓扑, 在走廊中间每隔1 m设立一个RP点, 共156个点.
为讨论设备异构性问题, 在实验中使用了3种不同的手机, 型号分别为小米10pro、 华为 mate40和蘋果12. 将小米10pro作为参考设备, 在156个RP点采集RSS数据. 在RP点上每隔2.5 s采集1次数据, 每个参考点采集4次, 并且每次采集的数据都经过了10次均值滤波, 共获得624组数据, 其中312组数据作为训练集, 各156组数据作为验证集和测试集, 其他两部手机在每个RP点只采集1次, 用于测试. 采集数据时, 所有手机均保持在同一高度且朝向相同. 为验证AP变化所产生的问题, 移动某个AP, 之后使用这三部手机在目标区域中各RP点再采集一组数据用于测试.
3.2 指纹标准化效果分析
本文采用基于普氏分析法对采集到的数据进行标准化处理, 使不同设备采集到的RSS曲线能趋近于同一条. 本文采用3种不同类型的手机进行实验分析, 使用这3台设备在某一RP点采集来自11个AP的RSS数据曲线如图2(A)所示. 由图2(A)可见, 不同手机在同一位置接收到的信号强度有明显差异, 其中最大差值甚至超过了10 dBm. 同时也发现虽然信号强度有差值, 但信号曲线的形状相似, 信号的变化趋势大致相同. 图2(B)为上述RSS曲线经过普氏分析后的标准化结果. 由图2(B)可见, 标准化后的信号强度曲线趋近于相同.
以小米10pro作为参考设备, 采用KELM对标准化前后的指纹库分别建立定位模型, 然后使用测试集进行测试, 结果列于表1. 由表1可见, 当使用小米手机作为参考设备并构建定位模型后, 使用其他设备测试定位精度时均会导致定位精度下降, 与使用小米手机相比, 误差约增加1 m. 在指纹经过标准化后, 异构设备的定位精度虽不及参考设备, 但误差均有所下降, 其中华为手机的精度提升23%, 苹果手机的定位精度提升35%.
3.3 指纹库更新效果分析
在实际定位场景中, 可能会存在AP位置改变、 设备信号衰减等问题, 导致定位精度下降. 本文提出使用GPR更新指纹库, 并重新构建定位模型, 以克服AP变化带来的影响. 本文实验仅使用小米手机进行测试, 实验结果如图3和图4所示.
由图3可见, 在指纹库经GPR更新后, 平均定位精度比更新前更高, 且离群点较少, 误差中位线也较低, 仅为0.72 m, 同时最大误差也更小. 由图4可见, 指纹库更新后的定位模型具有更快的误差累积速度, 约90%的测试点误差在2 m以下, 而未经过更新的指纹库所构建的模型有30%的测试点误差超过了2 m. 实验结果表明, 加入了GPR更新指纹库后能有效克服AP变化所产生的影响.
综上所述, 针对基于蓝牙指纹在室内定位中存在设备异构性和蓝牙信标节点发生变化的问题, 本文提出了一种针对异构设备和环境变化的室内定位算法. 先利用普氏分析对采集到的数据进行标准化, 然后使用标准化后的数据构建定位模型. 当环境中AP发生变化时, 采用高斯过程回归对其进行校准并更新指纹库, 根据新的指纹库重构定位模型. 实验结果表明, 该算法能有效克服异构设备产生的影响, 并自适应环境变化.
参考文献
[1]王慧强, 高凯旋, 吕宏武, 等. 高精度室内定位研究评述及未来演进展望 [J]. 通信学报, 2021, 42(7): 198-209. (WANG H Q, GAO K X, L H W, et al. Research Review and Future Evolution Prospect of High-Precision Indoor Positioning [J]. Journal of Communications, 2021, 42(7): 198-209.)
[2]XIA S X, LIU Y, YUAN G, et al. Indoor Fingerprint Positioning Based on Wi-Fi: An Overview [J]. ISPRS International Journal of Geo-Information, 2017, 6(5): 135-1-135-25.
[3]田增山, 王阳, 周牧, 等. 基于自适应渐消记忆的蓝牙序列匹配定位算法 [J]. 电子与信息学报, 2019, 41(6): 1381-1388. (TIAN Z S, WANG Y, ZHOU M, et al. Bluetooth Sequence Matching Location Algorithm Based on Adaptive Fading Memory [J]. Journal of Electronics and Information, 2019, 41(6): 1381-1388.)
[4]HAO Z J, DANG J W, CAI W B, et al. A Multi-floor Location Method Based on Multi-sensor and WiFi Fingerprint Fusion [J]. IEEE Access, 2020, 8: 223765-223781.
[5]潘维蔚, 康凯, 张武雄, 等. 基于WiFi的室内定位准确率改进算法 [J]. 计算机工程, 2020, 46(2): 207-213. (PAN W W, KANG K, ZHANG W X, et al. Improved Indoor Location Accuracy Algorithm Based on WiFi [J]. Computer Engineering, 2020, 46(2): 207-213.)
[6]秦宁宁, 王超, 杨乐, 等. 基于多元高斯混合模型的离线指纹数据库 [J]. 电子与信息学报, 2021, 43(6): 1772-1780. (QIN N N, WANG C, YANG L, et al. Off-Line Fingerprint Database Based on Multivariate Gaussian Mixture Model [J]. Journal of Electronics and Information, 2021, 43(6): 1772-1780.)
[7]邬春明, 齐森南. 改进K-means聚类的自适应加权K近邻指纹定位算法 [J]. 重庆邮电大学学报(自然科学版), 2021, 33(6): 946-954. (WU C M, QI S N. The Adaptive Weighted K-Nearest Neighbor Fingerprint Location Algorithm Based on K-Means Clustering Is Improved [J]. Journal of Chongqing University of Posts & Telecommunications (Natural Science Edition), 2021, 33(6): 946-954.)
[8]刘影, 李国庆, 钱志鸿, 等. 采用确定性信号传播模型的普适寻优定位方法 [J]. 重庆邮电大学学报(自然科学版), 2021, 33(3): 378-386. (LIU Y, LI G Q, QIAN Z H, et al. Universal Optimal Location Method Based on Deterministic Signal Propagation Model [J]. Journal of Chongqing University of Posts & Telecommunications (Natural Science Edition), 2021, 33(3): 378-386.)
[9]李新春, 黃朝晖. 基于聚类的PCA和GRNN的CSI指纹定位算法 [J]. 重庆邮电大学学报(自然科学版), 2021, 33(3): 449-457. (LI X C, HUANG Z H. CSI Fingerprint Location Algorithm Based on Clustering PCA and GRNN [J]. Journal of Chongqing University of Posts & Telecommunications (Natural Science Edition), 2021, 33(3): 449-457.)
[10]郭悦, 王红军. 基于改进LSSVR模型的移动节点定位技术研究 [J]. 重庆邮电大学学报(自然科学版), 2021, 33(1): 44-51. (GUO Y, WANG H J. Research on Mobile Node Location Technology Based on Improved LSSVR Model [J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 2021, 33(1): 44-51.)
[11]何富贵, 杨铮, 吴陈沭, 等. 一种层次Levenshtein距离的无指纹校准的室内定位方法 [J]. 智能系统学报, 2017, 12(3): 422-429. (HE F G, YANG Z, WU C S, et al. A Hierarchical Levenshtein Distance Indoor Location Method without Fingerprint Calibration [J]. Journal of Intelligent Systems, 2017, 12(3): 422-429.)
[12]金彦亮, 王妍, 齐崎, 等. 室内环境下无线干涉定位系统的多径误差分析 [J]. 计算机工程, 2021, 47(7): 135-139. (JIN Y L, WANG Y, QI Q, et al. Multipath Error Analysis of Wireless Interferometric Location System in Indoor Environment [J]. Computer Engineering, 2021, 47(7): 135-139.)
[13]王敬彬. 室内定位RSSI空间建模与接收设备偏差研究 [D]. 成都: 西南交通大学, 2017. (WANG J B. Research on Spatial Modeling of Indoor Positioning RSSI and Deviation of Receiving Equipment [D]. Chengdu: Southwest Jiaotong University, 2017.)
[14]谢代军, 孔范增, 胡捍英, 等. 终端异质下位置指纹的鲁棒性研究 [J]. 计算机工程, 2014, 40(5): 81-85. (XIE D J, KONG F Z, HU H Y, et al. Study on the Robustness of Position Fingerprint under Terminal Heterogeneity [J]. Computer Engineering, 2014, 40(5): 81-85.)
[15]ZOU H, HUANG B Q, LU X X, et al. A Robust Indoor Positioning System Based on the Procrustes Analysis and Weighted Extreme Learning Machine [J]. IEEE Transactions on Wireless Communications, 2019, 15(2): 83-90.
[16]HE S N, LIN W B, CHAN S H G. Indoor Localization and Automatic Fingerprint Update with Altered AP Signals [J]. IEEE Transactions on Mobile Computing, 2016, 16(7): 1897-1910.
[17]KJ[KG-*3]EEGAARD M B, MUNK C V. Hyperbolic Location Fingerprinting: A Calibration-Free Solution for Handling Differences in Signal Strength [C]//6th Annual IEEE International Conference on Pervasive Computing and Communications. Piscataway, NJ: IEEE, 2008: 110-116.
[18]GOWER J C. Generalized Procrustes Analysis [J]. Psychometrika, 1975, 40(1): 33-51.
[19]徐岩, 李宁宁. 双层PSO-ELM融合室内定位算法 [J]. 天津大学学报(自然科学与工程技术版), 2021, 54(1): 61-68. (XU Y, LI N N. Double-Layer PSO-ELM Fusion Indoor Location Algorithm [J]. Journal of Tianjin University (Science and Technology), 2021, 54(1): 61-68.)
[20]郭伯勋, 李军. 基于KELM的位置指纹室内定位方法研究 [J]. 计算机工程与应用, 2016, 52(9): 78-83. (GUO B X, LI J. Research on Indoor Location Method of Location Fingerprint Based on KELM [J]. Computer Engineering and Applications, 2016, 52(9): 78-83.)
[21]BROOKS A, MAKARENKO A, UPCROFT B. Gaussian Process Models for Indoor and Outdoor Sensor-Centric Robot Localization [C]//Proceedings 2006 IEEE International Conference on Robotics and Automation. Piscataway, NJ: IEEE, 2006: 1314-1351.
(责任编辑: 韩 啸)
收稿日期: 2022-03-03.
第一作者简介: 孙顺远(1985—), 男, 汉族, 博士, 副教授, 从事无线传感网与惯性导航的研究, E-mail: hzrobin@stu.jiangnan.edu.cn.
基金項目: 国家自然科学基金(批准号: 61702228).