MOPU移位作业智能化管理系统应用
2023-04-27姜春起胡猛张鸣翔仝家林宫忠才
姜春起,胡猛,张鸣翔,仝家林,宫忠才
(中海油能源发展股份有限公司采油服务分公司,天津 300452)
目前,渤海边际油田大小区块众多,海洋石油162平台在试采过程中经常需要拖航、重新定位、插拔桩。MOPU的拖航移位作业程序复杂,是一项受多因素影响、具有高风险、高难度、高技术含量的复杂工作[1],任何一项因素的考虑不周都有可能导致平台产生意外事故。为解决上述问题,“海洋石油162平台”积极推进远程监测、智能评估计算、智能文案等技术在MOPU移位作业中的应用[2],实现MOPU拖航、插桩拔桩作业的智能化管理,以期提高服务水平。通过卫星数据回传,可以实现对作业现场关键参数进行远程实时监测,及时发现施工作业中的问题,遇到紧急情况可以迅速做出决策并及时求援,最大程度减小损失,作业回传数据可以形成新的数据样本信息,为后续MOPU移位作业提供参考。
1 目标
“海洋石油162平台” 已经安装监测系统,采集桩腿深度、桩腿入泥深度、四角吃水、海水深度等数据,但这些数据只有现场作业人员通过本地主机才能进行观看,为了实现在陆地上的协同办公管理[3],通过现场安装北斗系统,以短报文的形式发送到陆上终端。
另外,为了实现对插桩/拔桩作业中的结构安全进行监测,通过安装应变仪和数据采集系统,以短报文的形式同样将监测数据传输到陆上终端[4]。通过安装北斗设备,还可以把拖航过程中平台的拖航速度和平台位置的经度和纬度传输到陆上终端,进而实现MOPU移位作业智能化管理。见图1。
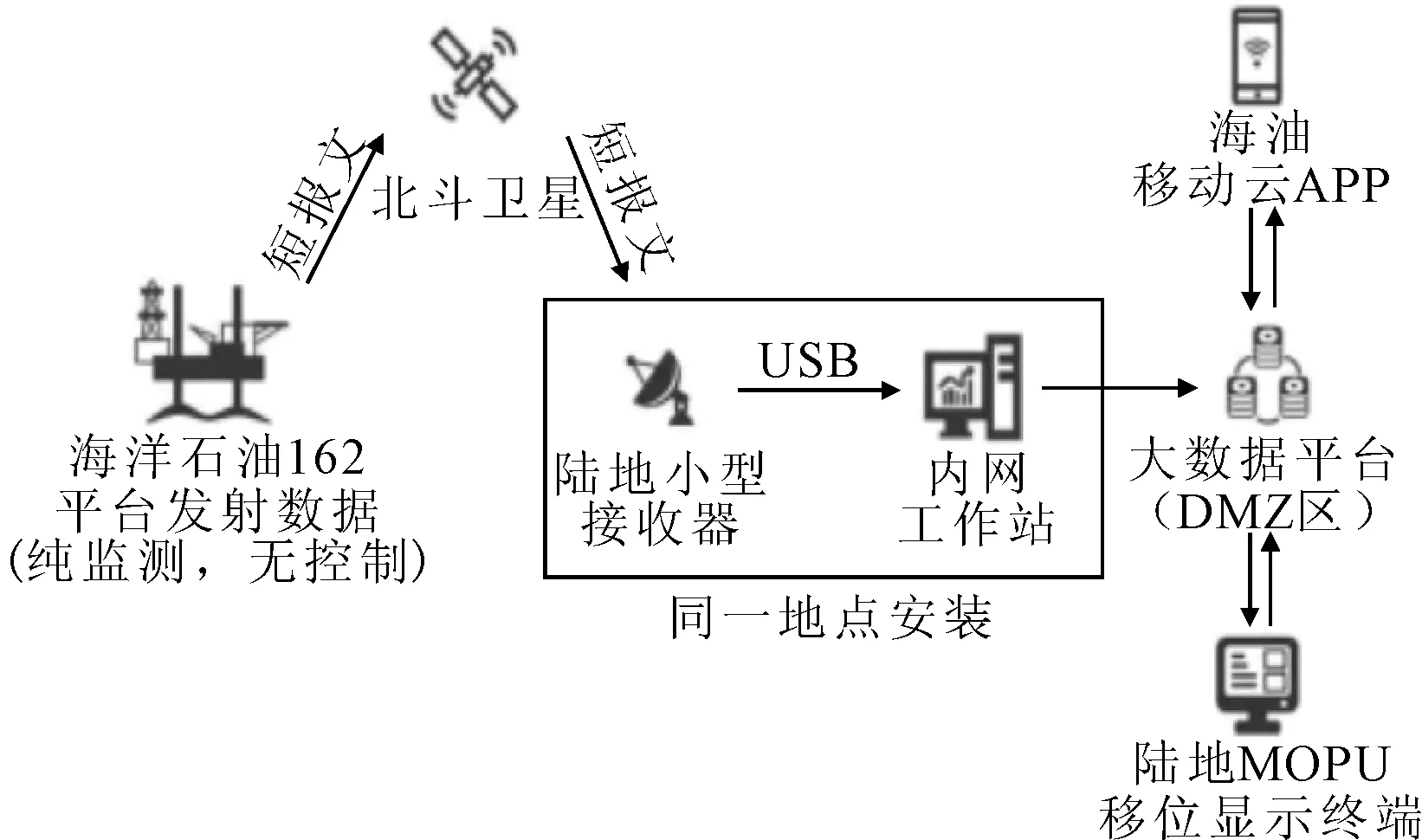
图1 MOPU移位作业智能化管理系统示意
为了监测在移位作业中HYSY162平台固桩架的应力状态,在主甲板上固桩架的翼缘处安装应变仪,其中三个固装架上布置4个应变仪,另外一个固桩架布置3个应变仪来避开防爆区,其中控制器安装在3号桩腿附近。
2 室外硬件系统组成
2.1 应变仪安装
采用焊接式应变计(DH1205K),防护等级IP68,适合金属结构长期监测,见图2。

图2 DH1205K应变仪
被测表面的变形(如应变变化)导致两端固定块相对运动,使得内部弹性元件发生形变,被粘贴在弹性元件上的高性能应变片感知,并通过数采仪器采集[5]。敏感元件采用低蠕变、高精度电阻应变片,经过严格的粘贴工艺和防潮密封技术措施,最后组成全电桥输出。应变仪采用保护盒进行保护,应变器与数据采集系统的连接采用船用线缆。
每个桩腿附近需要安装4个应变仪,固定在受力最大的支撑板上,在图3标示位置安装1个,壁板背面安装1个,壁板对侧的相同壁板上安装2个。用适当的清洁剂擦拭除油,然后用打磨机、锉、钢刷或砂纸以获得平整、光滑的安装基面。将2个安装块,通过M6螺母固定到焊接夹具上,然后将黑色部分直接焊接在安装区域,见图3。

图3 应变仪安装现场
安装块焊好后,放置一段时间,使焊接时产生的残余热量完全散失后,装上应变仪。安装完应变仪后,安装应变仪保护盒,在应变仪周围合适位置焊接2个M6×16的沉头螺丝,固定应变仪保护盒,保护盒为铝制。
2.2 控制器和采集器安装
控制器和采集器放置在防爆箱内,防爆箱安装在每个固桩架上,焊接角铁的位置见图4。

图4 采集箱安装现场
2.3 主数据采集箱
主数据采集箱外形尺寸为高×宽×深为650×550×220 mm,材质为2 mm冷轧钢板,防护等级IP44,盘内安装S7-1200 PLC组件用于采集现场设备输出信号。
该主数据采集箱的主要用于采集及处理以下信号。
1)4个桩腿的升降高度。
2)平台四角吃水。
3)海水测深。
4)气隙传感器输出。
5)双倾角传感器输出。
6)组合测距仪测距。
7)内置以太网交换机中继转发网络视频。
8)提供220V工作电源至组合测距仪现场接线箱。
2.4 从数据采集器1#
用于采集桩腿升降信号,主要包含4块脉冲信号分配模块,该模块将原系统升降信号一分为二,输入输出通道互相隔离,分别供原升降控制系统及平台状态监测装置进行采集处理。脉冲信号分配模块分别安装在4个桩腿的控制柜内,其主要参数见表1。
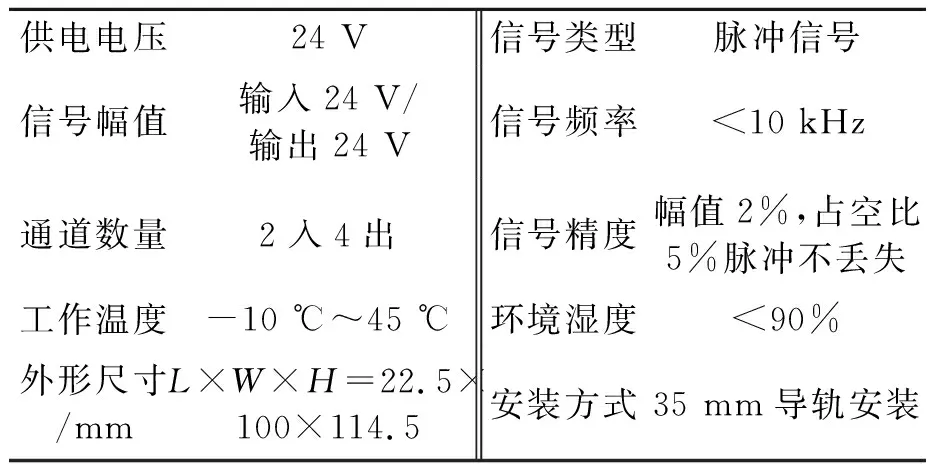
表1 从数据采集器1#参数
2.5 从数据采集器2#
用于采集平台四角吃水信号,平台原有吃水传感器接入从数据采集器2#,其输出信号接入原液位遥测系统,并通过Modbus-RTU协议与状态监测装置进行数据交换,接线简图见图5。
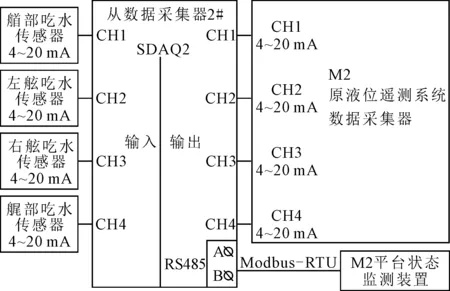
图5 从数据采集器2#接线简图
从数据采集器2#采集仪表主要参数如下。
供电电压:24 V DC;
功 耗:≤4 W;
输入/ 输出通道:4路/4路;
输入/ 输出信号:4~20 mA/4~20 mA;
输出允许负载:≦400 Ω;
测量精度:0.2%FS;
通讯方式:Modbus-RTU;
安装方式:面板嵌入式。
2.6 北斗传输线缆
拟采用ZB2110-16K型北斗多卡数传终端实现北斗数据回传,见图6。

图6 ZB2110-16K型北斗多卡数传终端实物
ZB2110-16K型北斗多卡数传终端是针对需要高频度通信用户开发的一款终端设备。其内部集成了北斗多频天线、射频模块、基带处理、多卡阵列以及主控板,可实现高频度短报文通信和 RNSS 导航定位等功能;还配有专门的固定支架,安装使用方便[6]。为了适应海上的恶劣环境,采取防水、防雾、防腐蚀等措施,并集成抗Wifi信号滤波器,开发低延时北斗短报文通讯协议。
从中控室上位机处铺设25 m的线缆,经线缆通道和线缆孔到中控室顶部,天线固定在中控室顶部支架上,中间线缆绑扎固定。
3 中控室内的软件安装
3.1 上位机安装
1)安装控制主机,控制主机包含主机箱和1台24"显示器,主机置放于中控台内,显示器摆放在中控台上。
2)安装通讯接线盒,外形尺寸350×300×120 mm,置于中控台内靠近主机位置。
3)安装布置两台测深仪主机,靠近升降操作台位置,测深主机外形尺寸270×264×95 mm。
3.2 软件安装
为了读取数据,需要在中控室的主机上插入一个多串口卡,另外需要安装表2所列的软件。
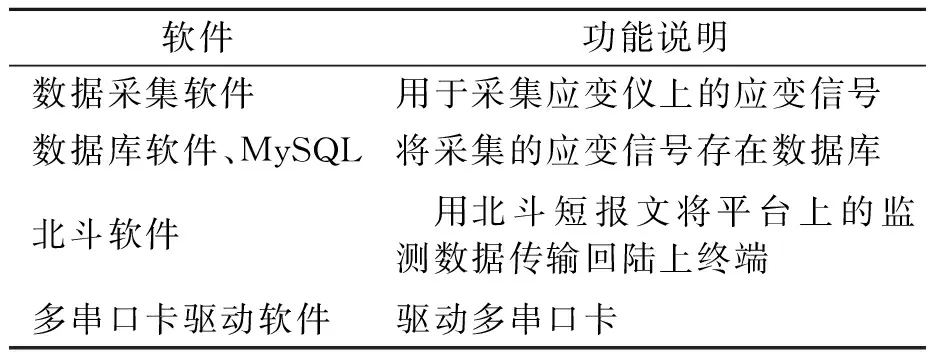
表2 主机上安装的软件
应变仪的主界面运行见图7,此时“通道列表”中会显示已经连接上的应变器,点击“刷新连接”可以刷新通道列表中的应变器。打开“启动采样”按钮,数据开始进行采集,然后点击“清零”按钮将误差清除,点击“数据存储”按钮将数据保存到MySQL数据库中。
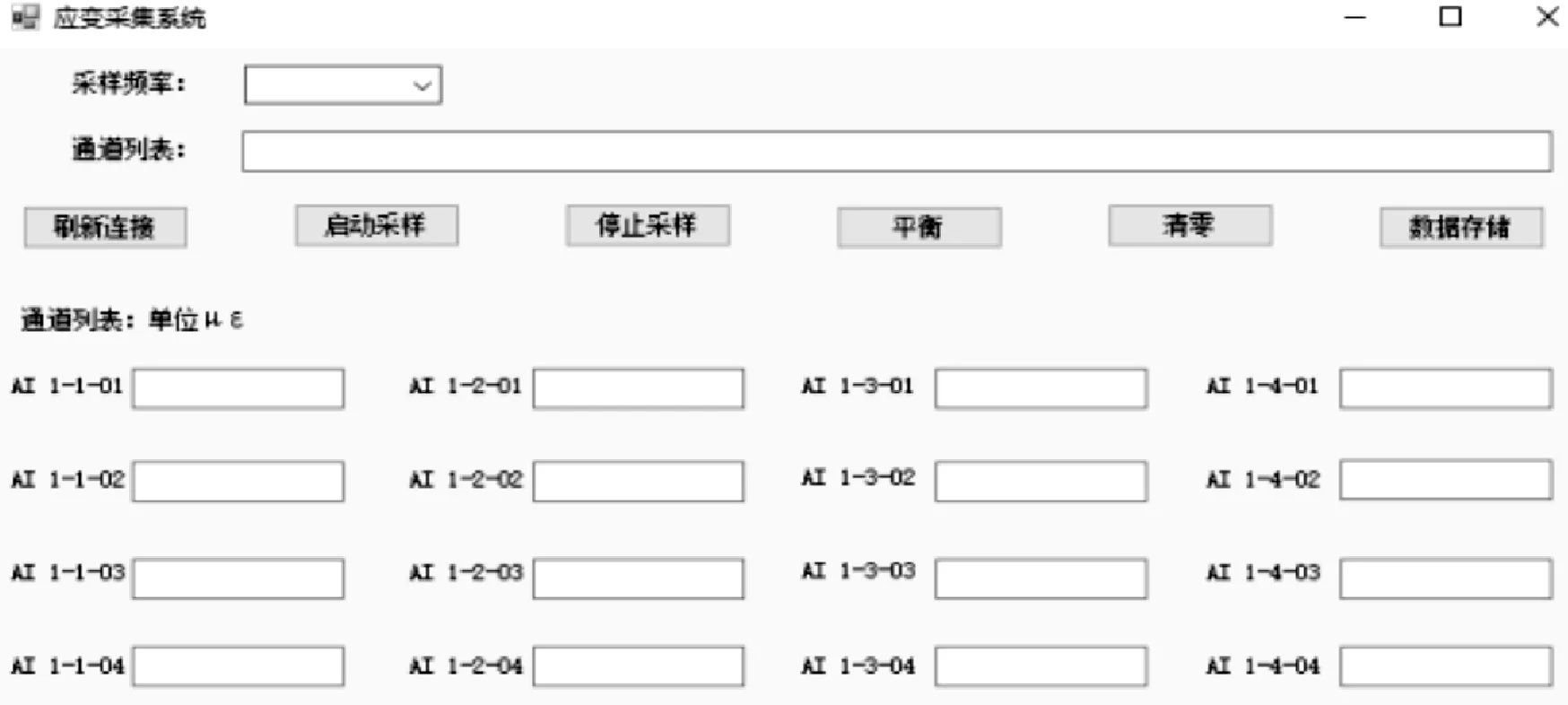
图7 应变仪的数据采集软件
ZB2110-16K型北斗多卡数传终端内部集成了北斗多频天线、射频模块、基带处理、多卡阵列以及主控板,可实现高频度短报文通信和RNSS导航定位等功能,北斗数据传输软件见图8。

图8 北斗软件数据传输软件界面
ZB2110-16K型北斗多卡数传终端积小、功耗低,连接简单、操作方便。终端内部最大支持17张北斗卡,其中一张为主卡,用于接收信息,也可以用于发送信息,其余16张为副卡,只用于发送信息。终端内部通过MCU合理调度可以实现高频度的数据传输,非常适合用于北斗运营平台、电力远程抄表服务中心、救援服务中心等领域。
4 系统维护及保养
4.1 系统维护要求
本系统的维护主要取决于现场工况的恶劣程度、系统的运行状态等因素。本章所描述的系统维护的内容及周期仅供参考,操作人员需要在使用的过程中不断的熟悉和了解设备的实际状况,并据此对系统进行更有效的维护和保养。
4.2 周期性维护要求
本系统满足长期持续运行和最小维护量的使用需求,但为了实现系统功能最大程度的可靠性,使用人员应该坚持进行下列周期性维护保养工作。
5 结论
本文针对“海洋石油162平台”积极推进远程监测、智能评估计算、智能文案等技术在MOPU移位作业中的应用,实现MOPU拖航、插桩拔桩作业的智能化管理。通过卫星数据回传,可以实现对作业现场关键参数进行远程实时监测,提高了设备的自动化程度,提高MOPU拖航及就位作业的安全性,作业回传数据可以形成新的数据样本信息,为后续MOPU移位作业提供参考。
通过MOPU移位作业智能化管理系统应用研究,有助于提高插拔桩作业效率和测量精度,提高了MOPU插拔桩作业、生产运行的安全系数,同时也降低了公司大型装备的运营风险;若再进一步研究,可降低测量误差,提高计算精度,并向其他MOPU平台推广,以现在成功的经验,带动其他MOPU平台工作效率和工作质量的提升。