水陆两栖飞机灭火飞行仿真系统构建与仿真
2023-04-19蔡志勇石含玥赵红军李天琦王希宇周尧明
蔡志勇,石含玥,赵红军,李天琦,王希宇,周尧明,4,
1.中航通飞华南飞机工业有限公司,珠海 519040
2.中国特种飞行器研究所,荆门 448035
3.北京航空航天大学 航空科学与工程学院,北京 100191
4.北京航空航天大学 先进无人飞行器北京市高精尖学科中心,北京 100191
森林不仅是一种重要的生产资料,也是重要的生态环境资源。中国是森林资源大国,森林覆盖率超过23%,并仍处于快速发展阶段,森林资源的健康发展对确保国家木材安全与生态安全具有十分重要的现实和战略意义[1]。中国同时也是一个森林火灾多发的国家,仅2020 年就发生森林草原火灾1 153 起,其中重大森林火灾7 起,受灾森林面积达0.85 万公顷(1 公顷=104m2),尤其是2020 年3 月12 日发生在四川省凉山州的造成19 人死亡、3 人受伤的重大森林火灾,在受到党中央的高度重视和引发全国广泛关注的同时,也暴露出中国森林航空消防体系薄弱的事实。东南林区、西南林区和东北林区是中国森林防火重点区域最集中的地区[2],也是历年来发生森林火灾次数最多、受灾面积最大的地区[3-4]。上述地区地形多为山地或丘陵,道路通行条件很差,一旦发生森林火灾,大型地面消防设备难以进入,只能依靠大量人力制造隔离带以控制火势蔓延,灭火效率很低且危险性很大,灭火飞机就是为了解决这个问题而诞生的。
灭火飞机是一种可以在空中投水进行灭火作业的通用飞机,当火灾发生时,利用飞机载水并将水投洒在火头、火线或火点上,可以有效扼制火势的蔓延,降低火灾对生命、财产和环境的影响[5]。相对于传统的地面灭火装备,灭火飞机最大的优势就是其可以从空中快速抵达火场,进行灭火作业,这对遏制火势在火灾初期的蔓延和扩散极为重要。中国森林航空消防工作是由中国南方/北方航空护林总站所负责的,目前主要使用各类中小型直升机执行森林消防灭火任务。消防航空设备数量少、性能差,专业航空消防人才储备不足,是目前中国森林航空消防体系的主要问题。在此背景下,大型固定翼灭火飞机应运而生。中国在研的大型灭火飞机有“鲲龙”AG600 的灭火型飞机,如图1 所示。AG600 水陆两栖飞机的灭火型(后文简称“两栖灭火飞机”)是专门为森林灭火而设计的水陆两栖飞机,灭火时可携带12 t 水或阻燃剂。相对于灭火直升机,大型固定翼灭火飞机用于灭火具有速度快、航程远、载水量大、续航时间长、灭火效率高、覆盖范围广等特点,这对于强调“打早、打小、打了”的森林灭火而言,具有重大意义[6]。当森林火灾发生时,两栖灭火飞机可从火场附近的河流、湖泊、水库等可用水域汲水,或在机场注水及阻燃剂飞赴火场,有效配合地面的消防力量控制火情,阻止火势蔓延,可将因火灾造成的损失降到最低[7]。使用灭火飞机培养飞行员进行真实的投水灭火、汲水训练具有费用高昂、训练周期长、安全风险大等缺点。因此通过构建水陆两栖飞机灭火飞行仿真系统(简称为“灭火飞行仿真系统”)进行投汲水灭火任务仿真飞行训练对于缩短灭火飞机飞行员的训练周期和节约训练试验费用非常重要。

图1 水陆两栖飞机“鲲龙”AG600 灭火型飞机Fig.1 “Kun Lung” AG600 amphibious fire-fighting plane
美国、英国等发达国家较早地将仿真技术应用于消防训练系统的开发,并已将开发的训练系统应用于实际的训练,取得了良好的训练效果[8]。国内对于飞机投水仿真研究大多集中于理论方面的仿真计算,进行飞机投水的仿真系统的研究则很少,更没有针对大型固定翼灭火飞机开发的投汲水灭火飞行仿真系统[9-10]。本文根据大型两栖灭火飞机的投汲水任务流程设计了一种水陆两栖飞机灭火飞行仿真系统,对于提高灭火飞机飞行员培训效率,节省培训费用,节约灭火飞机飞行试验费用,缩短飞行试验的时间,加快中国森林航空消防力量建设具有重要意义。
1 灭火飞行仿真系统构建
灭火飞行仿真是典型的人在环仿真。现今使用比较广泛的仿真系统架构主要是高层体系结构(HLA)和分布式交互仿真(DIS)。因为基于DIS 架构的系统具有结构简单可靠、实时性高、复现性好的优点,能够满足飞行仿真模拟器对高实时性和高复现性的需要,故本文基于DIS架构构建了水陆两栖飞机灭火飞行仿真系统,如图2 所示。本灭火飞行仿真系统由投汲水灭火仿真任务子系统、仿真管理子系统、综合航电模拟子系统、操纵与动力子系统、视景仿真子系统5 个仿真节点组成,如图3 所示。各个仿真节点间采取用户数据报协议(UDP)作为通信协议通过高速以太网进行连接。灭火飞机飞行仿真过程中对于投汲水任务流程的仿真实现主要涉及投汲水灭火仿真任务子系统、视景仿真子系统中的灭火飞机投水灭火场景构建、仿真管理子系统中的投水数据处理与灭火效能评估3 部分。投汲水灭火仿真任务子系统、灭火飞机投水灭火仿真、投水数据处理与灭火效能评估3 个仿真节点与功能是本灭火飞行仿真系统与通用的民航飞机飞行仿真系统主要的区别,故本文仅对上述3 个仿真节点功能:投汲水灭火仿真任务子系统、灭火飞机投水灭火仿真、投水数据处理与灭火效能评估进行研究与构建。

图2 水陆两栖灭火飞机仿真系统Fig.2 Amphibious fire-fighting aircraft simulation system
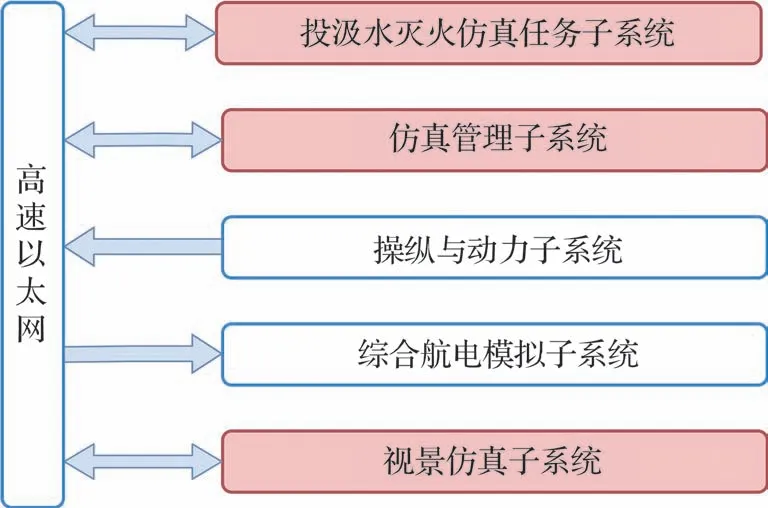
图3 灭火飞行仿真系统组成结构Fig.3 Structure of fire-fighting flight simulation system
1.1 投汲水灭火仿真任务子系统组成
投汲水灭火仿真任务子系统是投水与灭火飞行仿真系统的核心环节,其构建了灭火飞机投汲水任务仿真的硬件环境基础与软件环境基础,规定了灭火飞机执行投汲水灭火任务的操作流程与规范,监控灭火飞机在执行投汲水任务过程中任务相关参数数据变化。投汲水灭火仿真任务子系统其组成包括投汲水灭火仿真激励计算机、投汲水灭火任务计算机、投汲水灭火任务面板,如图4 所示。

图4 投汲水灭火仿真任务子系统组成结构Fig.4 Structure of pumping water extinguishing simulation task subsystem
投汲水灭火仿真激励计算机上运行有灭火仿真激励软件,其作用是构建开展投水灭火任务与汲水任务仿真的软件环境,对投水灭火任务仿真过程中相关参数进行设置与查看,同时也是连接灭火任务计算机与仿真管理子系统的桥梁,负责将来自仿真管理子系统的状态信息传递给灭火任务计算机,并将来自灭火任务计算机的投汲水任务指令传递给仿真管理子系统。
投汲水灭火任务计算机是灭火飞机进行投水灭火任务与汲水任务仿真的信息处理核心,主要负责将投汲水灭火任务面板上传来的灭火飞机飞行员的操作指令进行逻辑判断与处理,生成相应的投汲水任务指令与响应机构的工作状态,然后通过投汲水灭火仿真激励计算机发给仿真管理子系统,于此同时也将接收到任务信息与相关状态量,进行判断与处理后展示到投汲水灭火任务面板上,供灭火飞机飞行员查看。
投汲水灭火任务面板提供灭火飞机飞行员与投汲水灭火任务计机信息交互的渠道,通过投汲水灭火任务面板,灭火飞机飞行员可以查看投汲水任务相关机构工作状态、水舱水量、药剂携带量、可选择任务选项等信息,并通过投汲水灭火任务面板上的按键选择下一步要执行的任务进程或做出任务参数设定。
1.2 灭火飞机投汲水灭火场景构建
本节研究了典型森林火场以及水域场景的构建技术,构建出的不同气象条件下的典型火场和水域场景,用于不同模式的演示验证试验的场景配置。进一步地,建立了灭火飞机投水模型,用半物理形式的模型较为精确地描述水体投落的过程。本文使用Unity3D 引擎开发并构建了高分辨率的森林火灾、水陆两栖飞机水面汲水以及灭火飞机投水的可视化仿真场景,实现了大型两栖灭火飞机进行投水灭火和水面汲水并起飞的高精度可视化仿真。
1.2.1 典型高分辨率森林火灾场景
本节针对森林火灾高发的西南山区典型森林进行Unity 建模。对于不同典型森林火场火焰的燃烧、蔓延、抑制等粒子系统模拟问题,采用基于元胞自动机的火焰蔓延模型,将燃料床进行均匀正交离散化处理,结合Séro-Guillaume[11]燃烧平衡物理方程,建立蔓延各个状态的燃烧反应模型[12],同时针对森林火焰的可视化仿真,采用火焰粒子离散方法,将各个粒子团赋予相应的属性,如颜色、形状、大小等等,粒子随时间的推移不断地改变状态,从而模拟出火焰的无规则运动和变化的仿真效果,从而得到不同地理、风向下的典型森林火场仿真模型。具体来说,对于森林火场蔓延的可视化仿真主要采取了以下技术途径:通过地形区块映射关系,确定视景系统中点燃区域与未点燃区域的范围,进行点燃区域火焰粒子效果的生成,其中火焰高度数据从蔓延模型中获取。熄灭区域林木模型替换为烧毁林木三维模型。燃尽区域根据蔓延模型中温度数据,确定发烟的比例,并使用粒子效果,生成烟雾,仿真效果如图5 所示。

图5 森林火场状态可视化仿真Fig.5 Visual simulation of forest fire situation
1.2.2 汲水任务仿真场景
两栖灭火飞机汲水任务的可视化仿真难点在于水域的模拟和仿真,本文通过调研收集了海洋、湖泊等典型水域的环境数据,根据两栖灭火飞机在水面汲水和水面起飞过程的视景仿真需求,分析了水面波浪运动,采用海浪谱、波浪运动和粒子优化等手段着力展现不同水源的可视化特征,构建了高分辨率水域环境,其构建流程如图6 所示。

图6 汲水任务仿真场景构建流程Fig.6 Construction process of water pumping task simulation scenario
形成水面波动的原因很多,有风、气压、天体引潮力、地震以及水的密度、温度等,所以波浪往往具有各种不同频率的波。采用Tessendorf[13]提出的统计学海浪模型作为描述水面波纹的数学基础,将海浪视作一块各处高度随函数变动的平面,直接调整平面各个点的高度,生成动态可视化海浪,结合Jensen 和Goliáš[14]的浪尖修正函数后能够较好模拟5 级及以下的海浪。
对于海浪与海岸交界处,将海浪与海岸的交互转变为海面和海岸地形曲面的实时交互[15],引入磁性粒子概念到海岸线的生成过程中,建立海浪与海岸交互模型,通过设置海浪海岸交汇区域海浪顶点的磁感应系数,实现海浪末端顶点与海岸地形自动贴合,从而消除海浪和地形间的裂缝或者干涉。最后构建了模拟水面波浪运动的高分辨率水域环境,如图7 所示,支持了大型水陆两栖灭火飞机在汲水及水面起飞过程中水域仿真场景的可视化实现,如图8 所示。
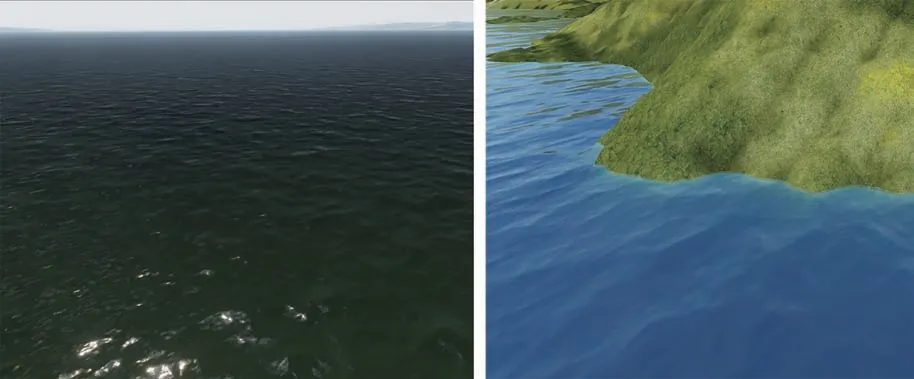
图7 湖泊水面可视化仿真Fig.7 Visual simulation of lake surface

图8 两栖灭火飞机水面滑行可视化仿真Fig.8 Visual simulation of water gliding for amphibious fire-fighting aircraft
1.2.3 投水任务仿真场景
本文在建立灭火飞机投水仿真模型过程中,根据不同阶段水体的运动特点的不同,将灭火飞机投水过程划分为投水阶段、水体破裂、液滴扩散分布3 个阶段,建立了灭火飞机投水参数与水体分布之间的映射关系,进而得到了较为精确地描述水体投落过程的半物理运动模型[16-17]。
投水阶段假设水体为不可压缩的理想流体,水体存储在水箱中,待出水口打开后,水体便在重力和液面气压作用下流出。根据机械能守恒定律建立水体的流动动力学模型,其表达式为
式中:ρLgh为单位体积重力势能,ρL为水体密度,g为重力加速度,h为高度;P为单位体积压力势能(压差);0.5ρLu20为竖直方向单位体积初始动能,u0为初始速度;0.5ρLu2为竖直方向单位体积末动能,u为水体速度。该速度均为建立在大地坐标系下的矢量速度,初始阶段,水体拥有同飞机相同的飞行速度,末阶段为垂直出水速度和飞行速度的矢量和。本文的研究对象是恒压投水系统,其对应的单位体积压力势能在投水过程中近似不变,那么水体的出流速度可以表示为
假设水箱为水平等截面体且出口截面面积是确定的,则可计算出在恒压投水系统下的水体投水初始速度、流量和投水持续时间[18]。
在水体破裂阶段,投放的水体的运动是一个复杂的动力学过程,水体与来流气体形成的二相流的作用产生复杂的破裂和扩散现象[17,19],水体投放的破裂扩散示意如图9 所示。

图9 水体一、二次破裂示意图Fig.9 Schematic diagram of primary and secondary rupture of water body
投水过程中,水从水舱进入到空气中所形成的射流可视为圆形自由紊动射流。根据紊动射流理论,紊动射流具有自保性,且混合区在射流的边界的扩展是线性的,故水体喷出后的扩散半径R是关于下降距离H的线性函数,通过试验可得到其扩散系数为0.25[20]。因此,水体接地所覆盖区域的半径为
在液滴扩散阶段,经多次试验研究表明[7],水体在被投放后会首先进行一次破裂形成韧带流和大液滴,随后流体之间的相互碰撞作用使其产生第二次破裂形成小液滴,宏观上产生雾状水体,进行扩散下落[16,21]。当水体完成破裂之后形成的液滴可以近似为液滴的掉落特性,在液滴间的相互作用力、重力、空气动力和科里奥利力的作用下不断扩散到达一定高度后,液滴的蒸发和耗散会使得扩散半径不再扩大,形成等半径散落。Legendre 等[22]通过测试数据拟合得到扩散直径为
对于定直平飞的灭火飞机,其洒水时,水体落地形成水带,在水带的不同位置,水体覆盖的程度不同。在固定机体坐标系上,已知水体前进方向为xa,相对于前进方向的横向方向ya,则对于不同的xa和ya值,水量分布是不同的,其分布近似满足高斯分布:
式中:ηmax为水体最大覆盖量,与xa有关。系数λ0可由水带宽度半径R计算得到:
其分布如如图10(a)所示,其中L0为飞机投水总距离,L为投水水带总长度,λ为投水水带宽度。当飞机航线为曲线时,可以将航迹划分为多个直线段与曲线的叠加。飞机沿着弧线飞行时,投下的水体形成的水带示意图如图10(b)所示。

图10 水带分布示意图Fig.10 Schematic diagram of water distribution
本文以面向仿真的物理模型为基础,对灭火飞机空中洒水时水体的运动进行可视化仿真,在虚拟环境中建立了符合基本物理规律的水体运动模型[16-17],计算并设置物理粒子系统的速度模块的参数。在水体的降落过程中,根据水体的受力计算其速度,并绘制出水体速度曲线,采用曲线控制模式对其速度进行控制。在粒子的生命后期,逐渐增加其透明度,营造出水体渗入地面的效果。通过设置粒子转速,在水体下落时的“水柱”边缘塑造出水团溅出、雾化时的动态感,其洒水效果如图11 所示。

图11 灭火飞机投水过程可视化仿真Fig.11 Visual simulation of water dropping process of fire-fighting aircraft
灭火飞机在执行投水操作命令后,对应水舱舱门开启,水体喷出水舱并扩散,散落在栅格化的地面上形成水带,通过视景仿真程序内置算法对栅格化地面上各个单元格内的降水量进行记录与统计后,通过网络端口以UDP 协议发往仿真管理软件对灭火飞机投水分布数据进行计算与展示,仿真管理软件是仿真管理子系统的功能实现载体。
1.3 投水数据处理与灭火效能评估方法
灭火飞机投水分布数据在仿真管理子系统的投水灭火仿真模块[23]进行处理、计算并展示在仿真管理子系统软件界面,以供仿真管理软件操作人员查看投水分布,评估其灭火效能。仿真开始后,在灭火飞机飞行过程中由仿真管理软件解算出飞机的飞行状态参数,灭火飞机在执行完投水灭火操作后,水体从飞机水舱抛洒出,经扩散后落到地面,由网格化的地面进行投水分布统计,将统计好的原始投水分布数据回传给仿真管理软件,其过程如图12 所示。

图12 灭火飞机灭火作业仿真场景框架图Fig.12 Frame diagram of simulation scene of firefighting operation by fire-fighting aircraft
原始投水分布数据需要经过一定的处理才能转换为可用数据,其处理流程如图13 所示,首先剔除掉远离投水中心的异常数据,然后将投水分布数据的坐标系从大地坐标系转换到以火场中心为原点的火场坐标系中,最后把投水分布数据展示到仿真管理软件的对应界面上,详见第2 节。
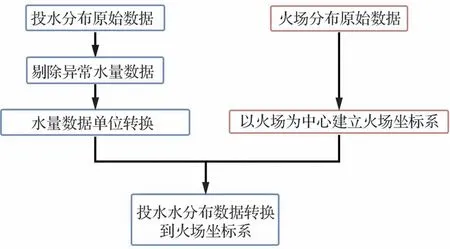
图13 投水分布数据处理流程Fig.13 Water distribution data processing process
利用水体灭火的主要原理是机械作用和冷却作用。在实际的消防任务中,下落的水体通过加速产生巨大的冲击力,并通过气化冷却来对起火点进行有效扑灭。本文以投水覆盖面积、投水均匀度以及投水有效利用率作为灭火效能参数去衡量水体扩散落地后对森林火灾的消防能力。投水覆盖面积定义为灭火飞机洒水后存在落水的区域面积,单位为m2。投水有效利用率定义为有效投水水量在总投水水量之中的占比,水体落地后形成的水膜超过一定厚度即被认为其为有效投水,对于不同类型植被上所发生的火灾,其有效投水的认定标准是不同的,本文根据课题前期研究结果,取平均水膜厚度0.8 mm 作为有效投水判断阈值。投水均匀度则为被有效投水覆盖区域内的平均水膜厚度,单位为mm。投水覆盖面积、投水均匀度以及投水有效利用率的计算流程如图14 所示。

图14 灭火效能参数计算流程Fig.14 Calculation flow of fire extinguishing efficiency parameters
2 灭火飞行仿真系统仿真
将本文所设计的灭火飞行仿真系统应用于水陆两栖飞机AG600 半物理仿真系统,进行两栖灭火飞机灭火飞行仿真。
2.1 投水数据处理与灭火效能评估方法
两栖灭火飞机执行森林灭火任务可采取汲水灭火任务模式和注水灭火任务模式。飞机在接到森林灭火任务指令后,可以在机场地面上对飞机水舱进行注水/灭火剂,也可利用火场附近的可用水源汲水后飞到火场上空进行投水灭火作业,2 种任务模式可以单独使用也可组合使用,如图15 所示。相比较于汲水灭火任务模式,注水灭火任务模式较为简单,其没有汲水过程,两栖灭火飞机仅往返于机场和火场之间,下面仅就汲水灭火任务模式进行说明,汲水灭火任务作业流程如图16[24]所示。

图15 两栖灭火飞机汲水灭火作业示意图Fig.15 Schematic diagram of water pumping operation by amphibious fire-fighting aircraft

图16 汲水灭火模式流程[24]Fig.16 Fire extinguishing mode work flow[24]
在做好试验准备后,依照汲水灭火任务流程开展投水汲水灭火任务飞行仿真试验,流程包括飞机地面注水,滑跑、起飞、爬升、巡航飞往火场,观察后执行投水操作,巡航飞往可用水域、水面降落、滑行汲水、水面起飞爬升、飞往火场区域。投水任务流程与汲水任务流程仿真过程分别如图17 和图18 所示。

图17 两栖灭火飞机机场起飞执行投水任务流程记录Fig.17 Procedure record of amphibious fire-fighting aircraft taking off from airport and performing water dropping task
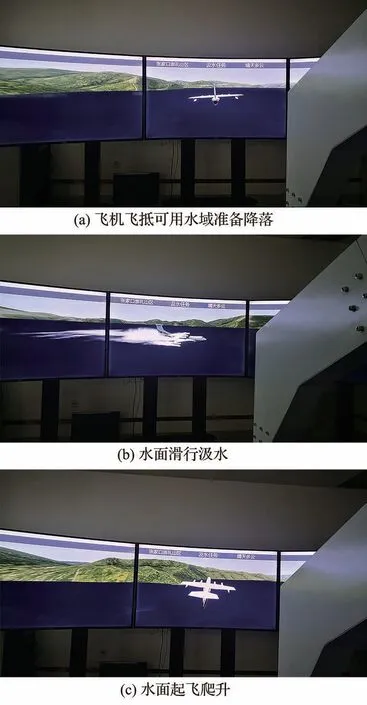
图18 两栖灭火飞机执行汲水任务流程记录Fig.18 Task record of amphibious air tanker pumping process
如图17(f)所示,在投水仿真管理软件的投水水量分布显示中,每一小格代表5 m×5 m 的地面单元格,红色区域是存在火场的区域,蓝色柱代表投水水量,柱的高低代表该单元格的落水水量多少(单位mL)。通过投水汲水灭火任务飞行仿真试验验证了本文所设计的灭火飞机半物理投汲水灭火任务飞行仿真系统能够实现灭火飞机投汲水灭火任务的仿真。
2.2 投水仿真结果与真实投水试验对比验证
为了验证本文所设计的灭火飞行仿真系统的仿真真实性,本节将对本灭火飞行仿真系统在一定飞行条件下的投水仿真的投水分布结果与AG600 灭火型所作真实投水飞行试验的投水分布结果进行对比验证。AG600 飞机在2021 年做了一系列的投水飞行试验,投水试验飞行演示如图19 所示。现选取其中一组投水飞行试验投水分布结果作为本文设计的灭火飞行仿真系统进行投水飞行仿真结果的对比对象。真实投水飞行试验投水分布如图20 所示。

图19 AG600 水陆两栖灭火飞机进行空中投水Fig.19 Water drop demonstration of an AG600 amphibious fire-fighting aircraft
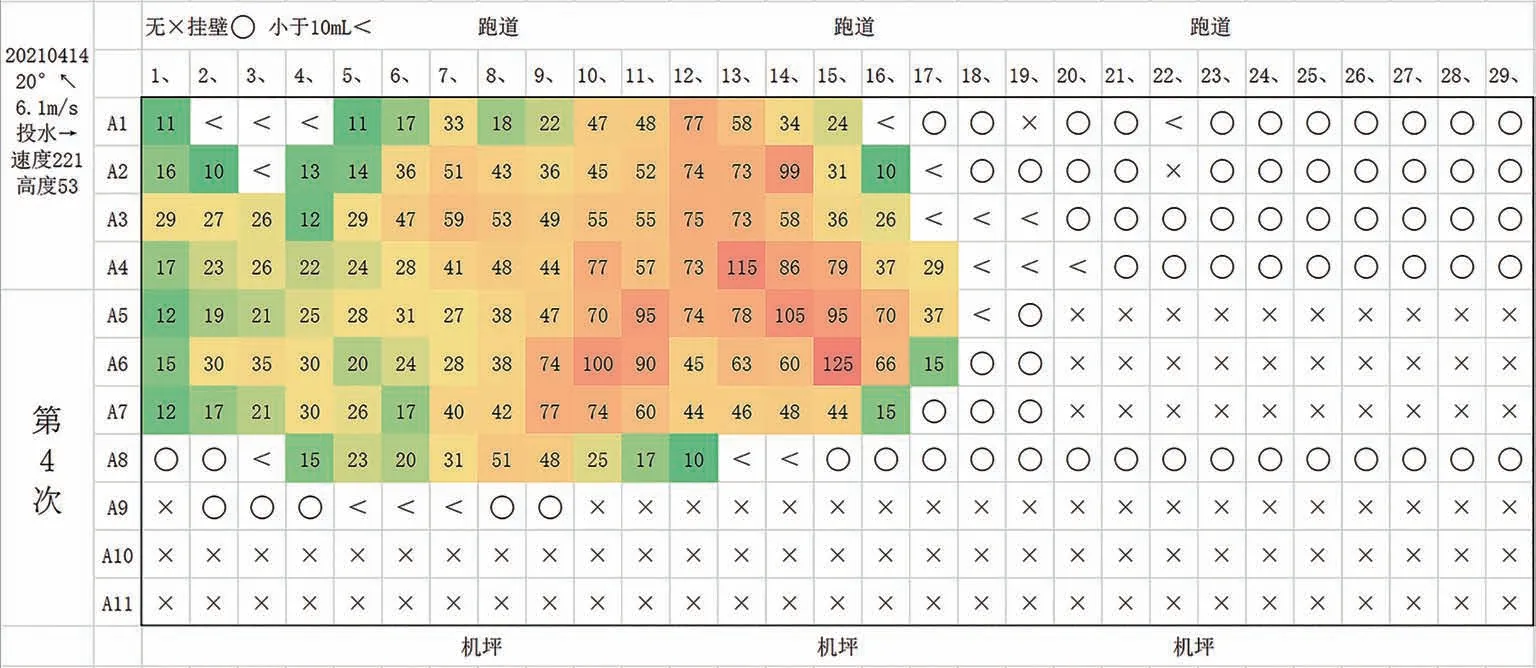
图20 投水飞行试验投水水量分布Fig.20 Water distribution results of water injection flight
投水飞行试验是AG600 灭火机型进行6 t 齐投投水飞行试验所得到的,试验批次为第20210414 批中的第4 次;试验投水地形为机场的机坪草地;试验条件为6 t 载水6 t 齐投模式,投水时飞机速度221 km/h(即61.4 m/s),投水时飞机离地高度53 m,风向北偏西20°,风速6.1 m/s。图20 表格中每一个格代表5 m×5 m 的方格区域,每一个方格区域中心布置一个长宽高为30 cm×20 cm×20 cm 的接水盒,表格中数字代表该次投水飞行试验中对应方格中盒子里的接水量(单位为mL),<代表对应方格中接水盒接到了水但水量小于10 mL,○代表对应方格中接水盒底没接到水但盒壁上存在水珠,✕代表对应盒中没有接到任何水。投水飞行试验需要进行处理才能够用来进行对比,处理流程如下:①将<所在方格记为5,○所在方格记为2,✕所在方格记为0;②用方格中的数字除以600 再乘以250 000 作为该方格接到水量的估计量(单位为mL),得到方格估计投水量分布如图21 所示。经过这样的处理后,飞行试验投水数据具有和投水飞行仿真投水数据同样的单位制和颗粒度。

图21 投水飞行试验格方格估计投水水量分布Fig.21 Water injection water distribution estimated by grid of water injection flight test
设计灭火飞机投水飞行仿真投水方案为投水模式6 t 齐投、投水速度61.4 m/s、投水离地高度53 m、风向北偏西20°、风速6.1 m/s、火场区域为平坦草地,进行投水飞行仿真试验,得到仿真投水分布结果如图22 所示。

图22 投水速度61.4 m/s、投水离地高度53 m 条件下6 t 齐投的投水飞行仿真数据分布Fig.22 Data distribution of 6 t of uniform water launching flight simulation under the condition of water launching speed of 61.4 m/s and altitude of 53 m
本文使用统计学中的Kolmogorov-Smirnov test(K-S 检验)方法检验飞行试验投水数据分布与投水飞行仿真的投水数据分布是否存在显著差异。现假设H0:飞行试验投水数据分布与投水飞行仿真的投水数据分布不存在显著差异。备择假设H1:飞行试验投水数据分布与投水飞行仿真的投水数据分布存在显著差异。分别取如下数据进行K-S 检验:①飞行试验投水的全部数据和投水飞行仿真投水的全部数据;②分别沿飞机投水速度方向取出最大投水数据出现的方格所在直线上的所有飞行试验投水数据和投水飞行仿真投水数据;③分别沿垂直于飞机投水速度方向取出最大投水数据出现的方格所在直线上的所有飞行试验投水数据和投水飞行仿真投水数据。对上述3 组数据进行K-S 检验得到pvalue 分别为0.209 7、0.353 6 和0.517 4,全部大于0.05,故接受原假设,即飞行试验投水数据分布与投水飞行仿真的投水数据分布不存在显著差异。通过K-S 检验证明了本水陆两栖飞机灭火飞行仿真系统的仿真投水数据分布与真实灭火飞机投水试验的投水数据分布在统计学意义上是一致的,本文所设计的灭火飞行仿真系统具有较高的仿真真实度。
2.3 灭火飞行仿真灭火效能评估试验
本文为探究在灭火飞行仿真环境中3 个投水条件:投水模式、投水高度与投水速度对1.3 节定义的3 个灭火效能参数的影响设计了如下灭火飞行仿真灭火效能评估试验方案。投水模式一共设计为3 种:12 t 载水12 t 齐投、12 t 载水6 t 连投(间隔2 s)、12 t 载水3 t 连投(间隔2 s)。对于每一种投水模式设计如下试验方案:将投水高度从30 m 到70 m 以5 m 为间隔离散为9 个等级,将测试投水速度从50~80 m/s 以5 m/s 为间隔离散为7 个等级,然后将投水高度、投水速度做自由组合,形成63 个匀速直线飞行条件下的投水方案,每个投水方案做5 次投水飞行仿真试验,记录每次投水飞行仿真试验的3 个灭火效能参数数值,取5 次均值作为该方案下的灭火效能参数数值,使用MATLAB 软件对得到的仿真试验数据进行插值拟合并可视化得到图23~图25,图中黑色点为数据点。

图23 12 t 齐投模式下灭火效能参数与投水高度、投水速度关系图Fig.23 Diagram of relationship between water efficiency parameters, water height and water speed in 12 t uniform casting mode
2.4 飞行仿真灭火效能评估试验结果分析
为了定量分析3 个投水条件分别对3 个灭火效能参数的影响,本文在3 种投水模式下分别以投水速度和投水高度作为自变量对3 个灭火效能参数:投水覆盖面积、投水均匀度和投水有效利用率数据进行拟合:①取投水高度为30 m,以投水速度为自变量,投水覆盖面积为因变量进行一元线性回归,取投水速度为50 m/s,以投水高度为自变量,投水覆盖面积为因变量进行一元线性回归;②取投水高度为30 m,以投水速度为自变量,投水均匀度、投水有效利用率为因变量进行二次回归,取投水速度为50 m/s,以投水高度为自变量,投水均匀度、投水有效利用率为因变量进行二次回归。
现定义一元线性方程如式(8)所示:
对于任意线性方程,可由其常数系数k和b唯一确定。定义二次回归方程如式(9)所示:
对于任意二次方程,可由其常数系数a2、a1和a0所唯一确定,本文以一元线性方程的常数系数k、b代表该一元方程进行记录,以二次回归方程常数参数a2、a1和a0代表拟合方程进行记录,所有拟合结果如表1 所示,拟合所用工具为统计学软件IBM SPSS Statistics,版本号25。所有拟合结果都有R2>0.995,说明拟合误差较小,符合预期模型。从图23~图25 和表1 中可以得到3 个投水条件对3 个灭火效能参数影响。
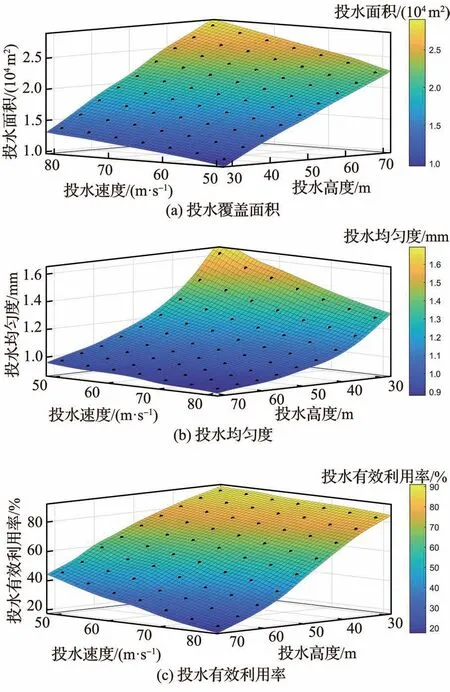
图24 6 t 连投模式下灭火效能参数与投水高度、投水速度关系图Fig.24 Diagram of relationship between fire extinguishing efficiency parameters, water height and water speed in 6 t continuous dropping mode

图25 3 t 连投模式下灭火效能参数与投水高度、投水速度关系图Fig.25 Diagram of relationship between fire extinguishing efficiency parameters, water height and water speed in 3 t continuous dropping mode

表1 3 种投水模式下以投水速度和投水高度作为自变量对3 个灭火效能参数的拟合结果Table 1 Fitting results of three fire extinguishing efficiency parameters obtained by taking speed and height of water injection as independent variables under three water dropping modes
2.4.1 3 个投水条件对投水覆盖面积的影响
1)随着投水高度增加,投水覆盖面积也随之线性增大,其线性系数如表1 中对投水覆盖面积数据的拟合一栏中所示。这是因为随着投水高度增加,水体降落过程中的扩散也会随之变得更为充分,其覆盖面积也随之增加。
2)随着投水速度的增大,投水覆盖面积也随之线性增大,其线性系数如表1 中对投水覆盖面积数据的拟合一栏中所示。这是因为投水速度越快,水体喷出水舱门后的射流失稳发生得越早,水体破碎速率的也越大,水体扩散的越快,覆盖面积随之增加。
3)通过对比以速度为自变量的线性方程的线性系数和以高度为自变量的线性方程的线性系数,可以观察到以高度为自变量的线性方程的线性系数k 至少2 倍大于以速度为自变量的线性方程的线性系数,即相对于投水速度,投水覆盖面积对投水高度更为敏感。故要增大投水覆盖面积,增加投水高度比增大投水速度更有效且更安全。
4)在对投水覆盖面积数据拟合结果中,以速度为自变量的线性方程的线性系数随投水模式从12 t 齐投、6 t 连投到3 t 连投而出现明显的递减,说明相较于3 t 连投,12 t 齐投的水体扩散受速度影响更大。初步分析其原因是3 t 连投产生的是四簇较小的水体,而12 t 齐投产生的是一簇较大的水体,同等高度和速度下,较小簇的水体扩散和破碎地更充分,因为雾化和蒸发所导致的损失也比大簇水体的更多,故3 t 连投模式下的水体覆盖面积随速度增长要缓于12 t 齐投模式。故为了减少雾化和蒸发所带来的水体损失,应该尽可能使用12 t 齐投,减少使用3 t 齐投,尤其是面对火场中火势较大的区域,其热场的蒸发作用尤为强烈。
5)在对投水覆盖面积数据拟合结果中,以高度为自变量的线性方程的线性系数在12 t 齐投、6 t 连投到3 t 连投3 种投水模式下相差不超过5%,变化不大,说明这3 种投水模式下,随高度变化的水体扩散速率在不同模式间是一致的。
2.4.2 3 个投水条件对投水均匀度的影响
1)随着速度增大,在各个投水模式下的投水均匀度都随之减小,且近似成二次关系。
2)固定投水高度为30 m、投水速度50 m/s时,12 t 齐 投、6 t 连 投 和3 t 连 投3 种 投 水 模 式 下投水均匀度分别为:1.653 mm、1.618 mm 和1.587 mm,可以看出在投水速度较低的时候12 t齐投的投水均匀度比6 t 连投的要提高2.1%,6 t连投的投水均匀度比3 t 连投的提高1.9%,说明3 t 连投的水体扩散是最充分的,6 t 连投次之,12 t 齐投水体扩散程度较小。12 t 齐投具有最高的投水均匀度,其投水水体落地后形成的水膜厚度最大,能够有效应对火势猛烈的火场区域进行扑灭。
3)固定投水高度为30 m、投水速度80 m/s时,12 t 齐 投、6 t 连 投 到3 t 连 投3 种 投 水 模 式 下投水均匀度分别为:1.241 mm、1.281 mm 和1.378 mm 分别较投水高度30 m、投水速度50 m/s 条件时下降24.9%、20.8%、12.2%。
4)随着投水高度的增加,在各个投水模式下的投水均匀度都随之减小,且近似成二次关系。3 种投水模式的以高度为自变量、二次回归方程参数中其常数项、一次项和二次项彼此之间的差别比较小,说明投水高度对投水均匀度的影响在不同模式下都是相近的。
2.4.3 3 个投水条件对投水有效利用率的影响
1)随着速度增大,在各个投水模式下的投水均匀度都随之减小,且近似成二次关系,其一次项与二次项系数都是负数。
2)固定投水高度为30 m、投水速度50 m/s时,12 t 齐 投、6 t 连 投 到3 t 连 投3 种 投 水 模 式 下投水有效利用率分别为:89.2%、88.8% 和88.2%,12 t 齐投的投水有效利用率比6 t 连投的提高0.4%,6 t 连投的投水有效利用率比3 t 连投的提高0.6%,12 t 齐投具有最高的投水有效利用率。
3 结论与建议
本文基于灭火飞机投水灭火任务流程,构建了一种水陆两栖飞机灭火飞行仿真系统,实现了大型灭火飞机投汲水任务飞行仿真,构建了国内首套大型固定翼灭火飞机投汲水灭火飞行仿真系统。同时使用K-S 检验方法对仿真飞行投水数据与真实飞行试验投水数据进行统计学检验,二者不具有明显分布差异的置信度在95%以上,证实了该仿真系统具有较高的仿真真实度。本文还探索了投水速度和投水高度对投水覆盖面积、投水均匀度和投水有效利用率3 个灭火效能参数的影响,并得到如下结论:
1)在各个投水模式下,投水覆盖面积随投水速度和投水高度的增加而线性增大,且相对于投水速度,投水覆盖面积对投水高度更敏感。
2)在各个投水模式下,投水均匀度随投水速度和投水高度的增大而减小,且为非线性关系,可近似拟合为二次关系。投水有效利用率也具有类似的规律。
3)不同投水模式的投水覆盖面积、投水均匀度和投水有效利用率受投水速度影响较大,受投水高度影响较小。
4)投水高度为30 m、投水速度50 m/s 时,12 t 齐投模式的投水均匀度比3 t 连投模式大4%,投水有效利用率大1%。
本文结论为投水灭火方案的制定提出如下建议:
1)要增大投水覆盖面积,增加投水高度比增大投水速度更有效且更安全。
2)若要提高载水的利用效率,减少雾化和蒸发,应该尽可能使用12 t 齐投,减少使用3 t 齐投,尤其是面对火场中火势较大的区域。
3)同等条件下,12 t 齐投具有最高的投水均匀度,其投水水体落地后形成的水膜厚度最大。
本文的研究成果同样适用于其他固定翼灭火飞机的投水灭火仿真系统的构建中。通过本文设计的水陆两栖飞机灭火飞行仿真系统,可不断地调整灭火飞机投水时机、飞行高度进行仿真演练与评估,优化灭火预案,提高灭火效率,节约飞行试验费用,缩短飞行试验的时间。通过该系统,灭火飞机飞行员可以进行地面投汲水灭火训练,使飞行员熟悉投汲水灭火任务流程,掌握设备使用方法与操作规范,缩短飞行员培训时间,节约培训费用,这对加快我国森林航空消防力量建设具有重要意义。
