嫦娥五号月球轨道交会导引策略设计
2023-04-19孟占峰高珊盛瑞卿
孟占峰,高珊,盛瑞卿
北京空间飞行器总体设计部,北京 100094
嫦娥五号任务完成了国际上首次月球轨道无人交会对接。其导引方案与以往空间交会任务并不相同,具有鲜明的中国特色和中国智慧。为了最大限度地提供故障应急处置能力,确保任务稳妥可靠实施,嫦娥五号制定了远程导引各次变轨过程全程测控可见的设计原则。而月球背面天然遮挡造成环月轨道每圈都有约1/3 的时间测控站不可见。在月球测控弧段受限条件下,既要满足变轨全程可见又要兼顾变轨过程能量较优,这是以往空间交会任务从未面临过的全新挑战。
已有学者对交会导引策略设计开展了大量的研究工作,主要包括理论研究和工程设计2 个方向。理论研究学者将交会导引策略设计问题转化为燃料最优的控制问题,采用理论最优和数值优化方法进行求解。这主要包括:Prussing 等[1-3]研究了不同边界条件和不同脉冲数量下的圆轨道最优能量交会问题;Carter 和Humi[4-6]采用理论简化模型系统地研究了圆轨道的无摄动条件下的燃料最优交会问题。Chen 和Xie[7]研究了共面的椭圆轨道到圆轨道的最优脉冲转移问题。他们研究的结果可以获得速度增量的理论最小值,对工程方案确定速度增量需求的下确界有理论指导意义。
Luo 等[8-12]则采用数值优化方法对相同的多圈多脉冲交会问题进行了系统的研究,将交会问题转化为数值优化问题进行求解。另外,周军和常燕[13]考虑地球J2项扁率的影响用非线性规划方法求解了多脉冲异面椭圆轨道的最优交会问题;Arzelier 等[14]用多项式优化算法求解线性脉冲最优交会问题。
国外工程任务的交会策略设计主要集中在美国和俄罗斯,分为两大类:第1 类是以美国航天飞机交会策略为代表的特殊点变轨方案,其平面内的变轨位置均在远地点或近地点,平面外的轨道参数采用独立的脉冲进行控制[15];第2 类是以俄罗斯联盟号飞船为代表的综合变轨策略,其每次变轨均包括平面内和平面外的2 个分量,可同时修正面内和面外的轨道参数,变轨位置也不固定,从而达到与变轨速度增量联合优化的目的。Baranov[16]以联盟飞船交会任务为背景,提出了近圆轨道偏差方程,其将非线性相对运动学方程在参考圆轨道附近进行线性化,获得了变轨速度增量与轨道要素偏差的线性关系,对综合变轨策略进行求解。该方法由于物理概念清楚,可以灵活安排变轨位置,因而得到了广泛的应用。
中国工程任务的交会策略研究主要在载人航天工程第2 步第1 阶段交会对接任务牵引下开展。该阶段的任务目标是:发射天宫一号(TG-1)目标飞行器, 发射神舟八号(SZ-8)、神舟九号(SZ-9)和神舟十号(SZ-10)飞船,通过3 次交会对接飞行试验, 突破和基本掌握航天器交会对接技术[17]。相关学者围绕这一任务开展了大量的工程实践研究:王忠贵[17]系统设计了中国首次空间交会对接远距离导引方案,并给出了飞行验证结果;李革非等[18]给出了神舟八号到神舟十号飞控实施阶段的交会对接远程导引轨道控制方案;胡军等[19]给出了神舟八号飞船交会对接制导、导航与控制(Guidance, Navigation, and Control, GNC)系统的设计以及飞行验证情况;解永春等[20]系统总结了神舟飞船GNC 系统交会对接自动控制系统设计的相关内容,并给出了在轨验证结果。载人航天工程第2 步第1 阶段的交会对接任务突破了地球轨道的交会对接技术,大量的技术成果已被成功应用于月球轨道交会对接任务中,为中国成功实施嫦娥五号月球轨道交会对接奠定了坚实基础。
通过以上调研可以发现,现有的研究大多数以地球轨道为目标,仅有少数对月球轨道交会进行研究,但其也未考虑实际月球轨道测控弧段的约束。而且现有的算法的计算模型都是以变轨点时刻为设计变量,变轨点的位置无法直接约束。另一方面,以往研究虽然获得了数值上的最优解,但通常只是数值意义上的某个特定解,大量满足要求的次优解及其分布规律并未揭示,这对于必须考虑参数可行变化范围包络的工程任务并不能直接采用。
以嫦娥五号月球轨道交会工程任务设计为背景,在中国载人航天地球轨道交会对接技术的基础上,本文的主要贡献如下:
1)建模。针对现有以变轨点时刻为设计变量的模型无法直接约束变轨点角位置的问题,建立了以变轨点纬度俯角和月心轨道坐标系(Radia Tangenial Normal, RTN)速度增量3 个分量为设计变量的交会导引求解模型。通过引入径向变轨控制量,提出了一种新的四脉冲交会策略,约束各次变轨点的纬度幅角,从而满足测控条件的要求。
2)求解。针对变轨点纬度幅角约束下的新交会导引模型,采用近圆轨道偏差方程推导了一种新的迭代计算方法,解决了传统方法初值猜测难收敛的问题。构造了以纬度幅角为变量的微分修正的精确数值求解算法,并推导了问题相应的状态转移矩阵的解析表达形式。
3)优化。将测控约束转化成变轨点纬度幅角的边界约束条件,将总速度增量作为优化变量进行求解,构建了问题的优化求解模型,并揭示了变轨点位置约束条件下,交会问题最优解的全局特性。
4)应用。在中国首次月球轨道交会对接任务中应用了本文的方法,通过嫦娥五号实际工程任务实施,验证了本文设计方案的正确性和有效性。
1 嫦娥五号交会任务概述
1.1 嫦娥五号交会导引过程
嫦娥五号交会导引是一种典型的双交会过程。双交会是指目标航天器和追踪航天器分别通过轨道调整,在规定的时间到达规定的目标轨道状态,以满足自主控制段的相对关系。双交会方案可以在追踪航天器实施导引前将目标航天器的轨道形状和相位提前调整到位,从而标准化追踪航天器交会过程的飞行时序,进而更好地满足变轨过程测控条件,并创造自主控制初始条件。由于双交会方案的以上优点,其在中国载人航天领域得到了广泛的应用[17]。
嫦娥五号任务的交会包括上升器远程导引过程和轨返组合体器调相2 个过程。上升器远程导引过程从上升器进入月面上升目标轨道开始,至上升器到达近程自主控制的初始瞄准点为止。上升器远程导引持续约2 d,期间通过4 次变轨,将上升器导引到轨返组合体前方50 km 左右、上方10 km 左右的高度210 km 的环月圆轨道指定位置。轨返组合体调相过程从着陆器环月降轨开始,至上升器月面起飞前为止。轨返组合体调相持续约2 d 时间,共执行4 次变轨,目的是保证轨返组合体在交班点时刻到达轨道高度为200 km 环月圆轨道的预定相位。
在上升器和轨返组合体到达交班点后,轨返组合体将作为主动航天器完成后续自主控制、对接和样品转移过程。嫦娥五号月球轨道交会过程如图1 所示。图中,E0和E*f分别表示上升器入轨点和交班点的轨道要素;Δv1T为上升器远程导引第1 次变轨的切向分量;Δv2N为上升器远程导引第2 次变轨的法向分量;Δv3T为上升器远程导引第3 次变轨的切向分量;Δv4R和Δv4T为上升器远程导引第4 次变轨的径向分量和切向分量。

图1 嫦娥五号月球轨道交会过程示意图Fig.1 Rendezvous profile of Chang’e 5 mission
由于轨返组合体调相从设计模型和方法上与上升器远程导引类似,限于篇幅,本文仅对上升器远程导引进行介绍。
1.2 工程任务设计约束
嫦娥五号上升器远程导引策略工程设计时需要满足如下要求:
1)交会时间要求。过长的交会时间不利于整个飞行任务的安排。在保证测控条件约束下,应尽快完成交会任务,嫦娥五号任务要求在2 d左右的时间完成月球轨道交会,整个交会任务时间最长不能超过3 d。
2)测控要求。在变轨过程中,地面测控站需要保证变轨全过程(含变轨前调姿过程)对上升器进行跟踪测轨、遥控遥测和数据通讯;在每次变轨前,需要确保至少2 圈的测轨弧段和1 圈的策略注入弧段。
3)入轨点参数要求。入轨点是交会远程导引的初始状态。入轨点近月点高度需要确保上升器入轨后可安全运行1 圈以上并兼顾考虑上升器入轨能量的最优;远月点高度需要考虑入轨安全性和后续远程导引策略最优。为了留有更多的测控弧段用于入轨后的测轨,入轨时刻安排在中国双站共视弧段进站后5 min。
4)初始瞄准点参数要求。初始瞄准点(Initial aim point),又称为交班点,是交会远程导引的终端目标,也是交会近程自主控制的起始点,是远程导引与近程自主控制的接口和界面。为了给自主控制段创造良好的条件,在初始瞄准点时刻,上升器和轨返组合体均为圆轨道且共面飞行。由于是首次月球轨道交会对接任务,嫦娥五号选择了较为容易实现的负V-bar 交会策略,即:作为主动追踪器的轨返组合体在交班点需要略低于上升器几千米到十几千米,并在上升器的后下方几十到上百千米的距离,以保证相对测量设备良好的测量条件。交班点时刻的安排需要综合考虑交班点的测控要求以及后续自主控制段的测控要求,还要保证在误差条件下交班点的测控依然满足要求。
1.2.1 ~1.2.3 节将对各个约束条件进行详细讨论。
1.2.1 测控约束条件
对于变轨点的测控约束是通过设计变轨点的圈次和纬度幅角来满足的,通过圈次设计可以满足每次变轨前的测定轨弧段要求和注入弧段要求;通过纬度幅角设计可以满足变轨全过程测控可见的要求。而纬度幅角设计是与交会策略求解耦合的,这将在5.4 节进行介绍,这里仅给出变轨点圈次的设计考虑。
变轨点的圈次设计主要考虑:各次测定轨精度对测控弧段的需求,以及用于变轨前注入数据的测控站安排,这需要与定轨精度分析工作和飞行时序安排工作反复迭代最终确定。与文献[8-11]中将其作为设计变量进行优化不同,在嫦娥五号轨道设计时,通常不将其作为任务规划的设计变量进行迭代,而是根据各方的协调匹配的结果提前确定。嫦娥五号任务确定的从发射入轨到交班点的圈次安排如表1 所示。
从表1 可以看出,嫦娥五号交会任务在25 圈完成,整个任务时长约50 h,满足“在2 d 左右的时间完成,整个交会任务时间最长不能超过3 d”的任务要求。安排的圈次可以保证每次变轨前至少有2圈定轨弧段和1圈注入弧段的要求。

表1 圈次安排Table 1 Schedule of maneuvers
1.2.2 入轨轨道参数
上升器从月面起飞后的入轨点是交会过程的起始点,入轨点参数主要由确定轨道形状的近月点高度、远月点高度、入轨时刻3 部分组成。
1) 近月点和远月点高度的确定
近月点高度的确定主要考虑上升器入轨安全性,根据月面地形分析结果及轨道演化情况,最终将近月点高度确定为15 km。
远月点高度的确定主要考虑上升器入轨偏差以及入轨后的变轨策略最优。为了避免交会对接过程中出现减速脉冲,在误差条件下远月点必须低于200 km 的目标器环月轨道高度。为了确定误差条件下的远月点高度范围,GNC 系统考虑了的月面初始对准偏差、上升过程中的惯导累积偏差、以及发动机推力大小、比冲和安装偏差等因素进行了打靶仿真。结果表明,上升器入轨后的远月点高度变化范围为±19 km。因此,远月点高度确定为180 km。
2) 入轨时刻的确定
入轨时刻主要决定了初始非公面度和初始相位差。分析表明,仅存在唯一的圈次可以保证入轨非共面度为零,因此月面上升理论上是“零窗口”。标称入轨时刻是根据下降和起飞共面的要求设计得到的,具体如图2 所示。
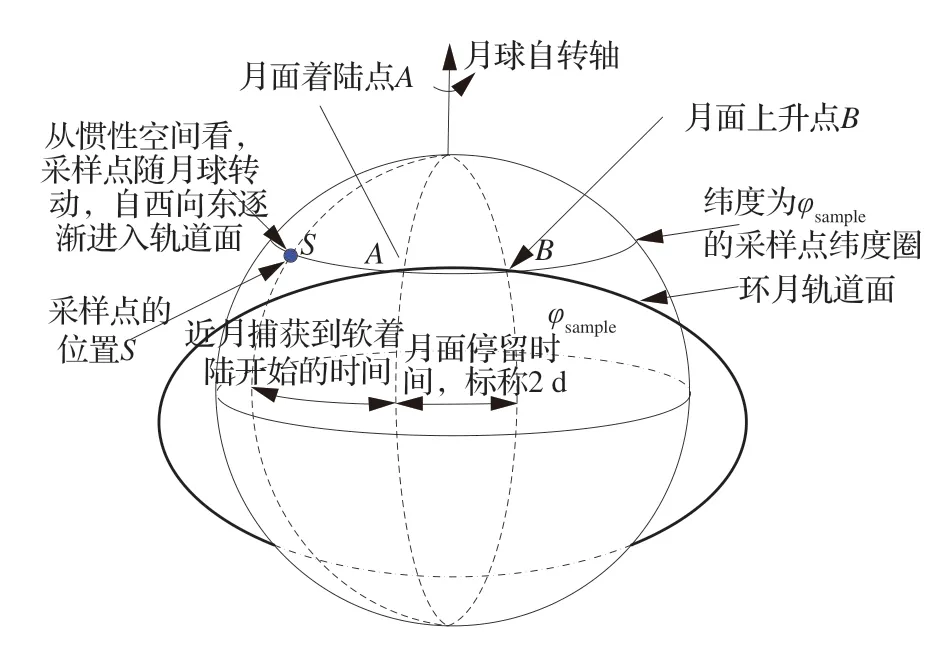
图2 月面上升时刻采样点与轨道面相对关系示意图Fig.2 Geometric relation between sample area and orbit plane
为了给上升器入轨后保留尽可能多的测控弧段用于定轨,上升器的起飞时刻被安排在起飞当天进入中国首个深空站共视弧段后5 min 实施,根据测控弧段分析结果,可以确定出起飞的绝对时刻。入轨点纬度幅角可以根据动力上升的航程和上升时刻采样点与轨道面的相对几何关系确定,嫦娥五号任务的计算结果为108.7°。入轨点的倾角和升交点赤经根据入轨时刻上升器与轨返组合体的轨道非共面度最小的条件进行确定。
1.2.3 初始瞄准点参数
初始瞄准点的确定包括瞄准点时刻和瞄准点参数2 部分。瞄准点时刻主要由瞄准点相对测控弧段的角位置决定;瞄准点参数包括轨返组合体和上升器2 部分内容:轨返组合体的瞄准点参数是根据近程自主控制的要求确定,主要考虑的是近程自主控制过程与测控弧段的匹配要求;而上升器的瞄准点参数设计是根据轨返组合体瞄准点参数和二者相对位置关系决定。
1) 轨返组合体瞄准点参数确定
近程导引需要对2 个探测器同时进行测控,因此需要安排在2 个深空站同时可见的弧段内。设计结果表明近程导引过程需要210 min 的时间,因此需要安排在3 个连续测控弧段内。另外,对接后完成样品转移需要20 min 时间,且还需要预留用于处理对接过程和样品转移故障的时间,这对瞄准点的设计提出了很多限制。
另一方面,瞄准点设计不但要考虑标称情况,还要考虑误差条件下的包络情况满足任务要求。这就要求瞄准点在一定范围内滑动后,各项约束条件依然满足。
图3 给出了标称近程自主控制段的飞行时序设计结果。其中,T表示首个测控弧段的开始时刻,T+83 min 表示第1 个测控弧段结束时刻,T+256 min 表示第3 个测控弧段开始时刻;Taim表示交班点时刻,Taim+192 min 表示出100 m 停泊点的时刻。为了确保100 m 停泊点在测控弧段内,需要确保:Taim+185 min >T+256 min,可以求得Taim>T+64 min。考虑到交班点必须在第1 个测控弧段内,因此Taim<T+83 min。因此,初始瞄准点的可行范围为
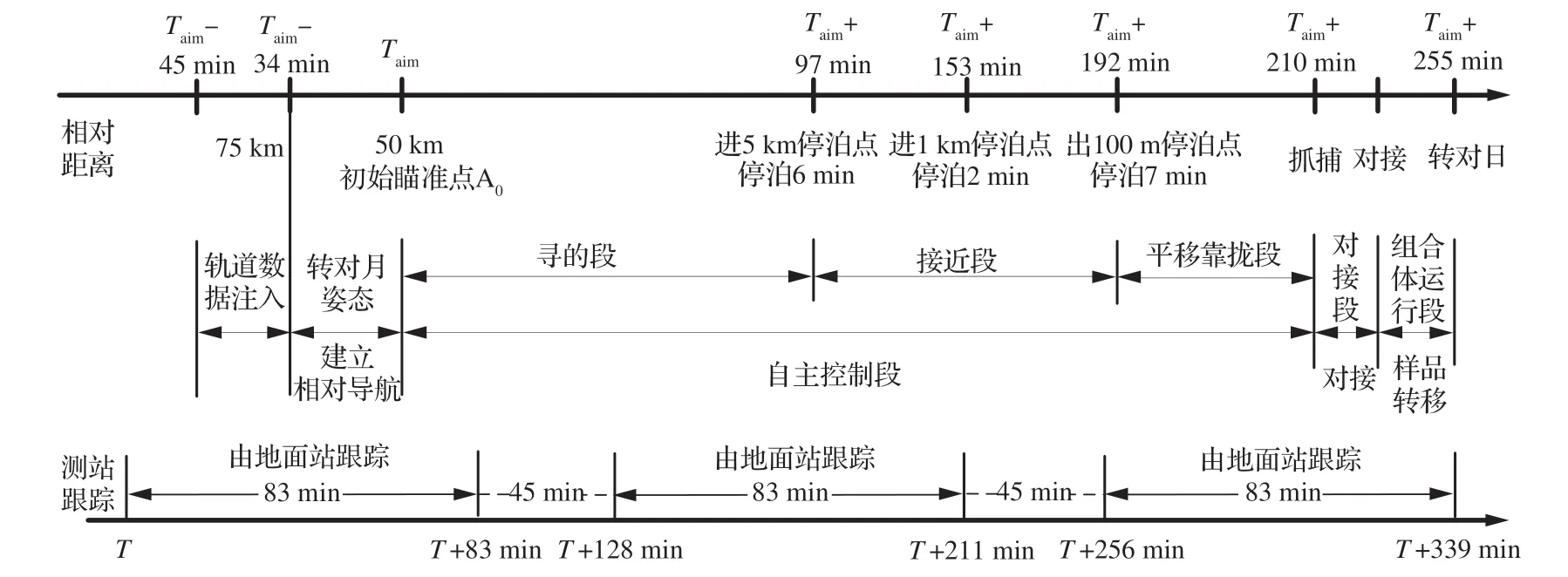
图3 近程自主控制段飞行时序Fig.3 Profile of close range rendezvous phase
根据误差打靶仿真结果,初始瞄准点切向有±6.4 km 的变化范围,对应的到达初始瞄准点的时刻有±9 min 的变化范围。将初始瞄准点确定为T+74 min,也就是出第1 个测控弧段前9 min,能够确保初始瞄准点在±9 min 范围内漂移的情况下的测控可见,满足任务设计要求。
根据测控弧段分析结果可以确定出其对应的绝对时刻以及对应的纬度幅角。嫦娥五号任务的具体的计算结果为108.7°。再加上200 km的圆轨道、轨道外推后得到的升交点赤经和轨道倾角等参数,就可以完全确定瞄准点轨返组合体的目标轨道参数。
2) 上升器瞄准点参数确定
上升器瞄准点时刻与轨返组合体瞄准点时刻相同,轨道参数根据上升器与轨返组合体的相对参数导出。与以往交会任务不同,嫦娥五号上升器在交会段作为主动航天器,而在自主控制段又转变为被动航天器,因此,上升器的目标瞄准点不是在传统方案的共面后下方,而是在与轨返组合体共面的前上方。这主要是受整个系统重量限制,将交会对接的主动测量、控制和对接机构放在了轨道器上,减少不必要的重量落到月面后再回到环月轨道。这也是嫦娥五号无人月球轨道交会方案的一个重要创新点,为整个探测器系统方案优化做出了重大贡献。
上升器与轨返组合体在瞄准点时需要共面且共圆。因此采用平面内的高度差和距离差2 个参数来描述二者的相对位置关系。高度差主要是考虑近程自主控制的相位调整能力(时间调整能力)以及瞄准点的高度控制精度。距离差主要是根据近程自主控制相对导航设备的捕获能力决定的。经过仿真分析,最终确定的相对高度差为10 km,相对距离为50 km。
因此,上升器的目标瞄准点在与轨返组合体共面的210 km 高的圆轨道上,在轨返组合体的前上方50 km。图4 给出了瞄准点的两器相对位置关系。
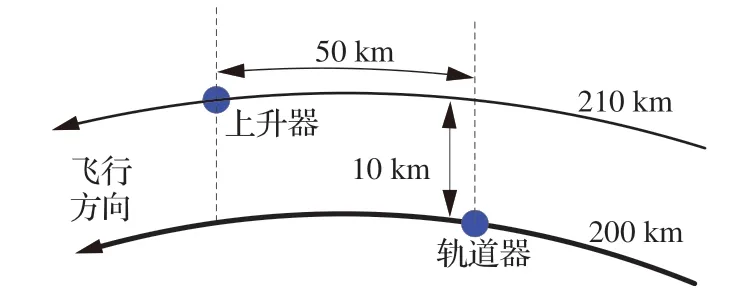
图4 瞄准点两器相对位置示意图Fig.4 Relative position of two vehicles at aim point
2 坐标系定义
2.1 月心J2000.0 坐标系(MCI)
月心J2000.0 坐标系(Moon Center Inertial,MCI)的原点在月心,坐标系的X、Y、Z三轴与地心J2000.0 平赤道平春分点坐标系平行。
2.2 月心平赤道惯性坐标系(MCE)
由于月心J2000.0 坐标系的XY平面是与地球赤道面相关的参考平面,在描述环月轨道参数时,轨道参数的物理不明确,因此参考地心J2000.0 与地球赤道面的关系,定义如下月心赤道 惯 性 坐 标 系(Moon-Centered Equatorial, MCE):该坐标系与J2000.0 时刻IAU月心平赤道固连系XY基本平面重合,x轴指向基本面与J2000 系XY面的交线,y轴由右手定则决定。根据DE421 星 历 表[21],可 以 查 得J2000.0 时 刻MCI 系到MCF 系的Euler3-1-3 转序对应的转角为(αJ2000.0,βJ2000.0,γJ2000.0),则MCI 系到MCE 坐标系的转换矩阵可以写为
不难看出,RMCEMCI是一个常值坐标转换矩阵。由于MCE 坐标系可以表征环月轨道倾角的真实物理意义,因此在嫦娥五号月球轨道交会任务中,用于轨道计算的惯性坐标系统一采用MCE坐标系。
2.3 月心轨道坐标系(RTN)
根据位置和速度(r,v),可以求得对应的月心轨道坐标系坐标系到惯性坐标系的方向余弦阵为
式中:位置方向(R 方向)的单位矢量为̂=r|r|;速度方向单位矢量为̂=v|v|;轨道面法线方向(N 方向)单位矢量为T 方 向为切向方向,单位矢量为
3 交会问题描述
采用脉冲模型建立多圈多脉冲的交会导引策略。设初始状态的下标为0,终端瞄准点(交班点)状态的下标为f,各次变轨点的下标为i(i=1,2,…,n)。记第i次变轨前后的位置速度分别为和;变轨的速度增量为,Δvi在RTN 坐标系下的分量分别记为ΔviR、ΔviT和ΔviN。各次变轨点所在的圈次为Ni(i=1,2,…,n),初始状态所在的圈次记为N0,瞄准状态所在的圈次记为Nf,变轨点的纬度幅角为ui。初始状态为X0=(r0,v0),对应的绝对时刻为T0,目标瞄准状态为Xf*=(r*f,v*f),对应的绝对时刻为Tf。
交会导引问题可以描述成如下非线性方程组解的问题:在给定X0、T0、Tf、Ni给定的条件下,在[ΔviR,ΔviT,ΔviN,ui](i=1,2,…,n)中选出p个设计变量矢量Cp×1,在X*f中选出q个目标瞄准变量Dq×1,组成如式(4)所示非线性方程组:
求解方程组的根Pp×1称为交会导引策略求解。
交会问题的瞄准变量Dq×1一般为交班点时刻的6 个轨道要素。为了避免偏心率为0 的情况下,定义近圆轨道要素E为
式中:a为半长轴;i为轨道倾角;Ω为升交点赤经;ω为近月点幅角;θ为真近点角;u为纬度幅角u=ω+θ;ex和ey为偏心率矢量e在轨道平面内的分量,分别可以表达为ex= ||ecosω,ey= ||esinω。
近圆轨道要素E与状态矢量X有唯一的相互转换关系,X0和Xf可以分别转换为初始和终端轨道要素E0和Ef。
4 交会方案设计
目前国际上已有的交会任务方案分为两大类:一是多圈多脉冲交会;二是快速交会。由于月球轨道上没有地球轨道上的导航星座进行自主定轨,受重量功耗限制上升器上无法配置作用距离上千千米的相对导航雷达,因此嫦娥五号任务选择了2 d 的多圈多脉冲方案实施月球轨道交会任务,从而增加个测控时长并保留相对大的误差修正和相位调整能力,这对于首次实施月球轨道交会的嫦娥五号是相对最优的方案。参考我国神舟飞船的五脉冲交会导引策略,考虑测控弧段数量紧张,将第5 个综合修正脉冲去掉后,从而构成了一种最常采用的四脉冲交会导引策略。如表2 所示。

表2 传统四脉冲交会导引策略Table 2 Classical 4-impulse rendezvous guidance law
该方案虽然已经约束了第1 次和第3 次的变轨点纬度幅角位置,但由于该方案第4 个脉冲的纬度幅角u4为设计变量,变轨点的测控条件无法保证,这不能满足嫦娥五号任务的要求。因此,需要约束各次变轨点位置以保证变轨全过程的测控条件。针对这一要求,本文提出一种新的四脉冲交会策略,将第4 次变轨点纬度幅角固定,并引入径向变轨控制量,通过约束各次变轨点的纬度幅角达到满足测控条件的要求,具体的策略如表3 所示。
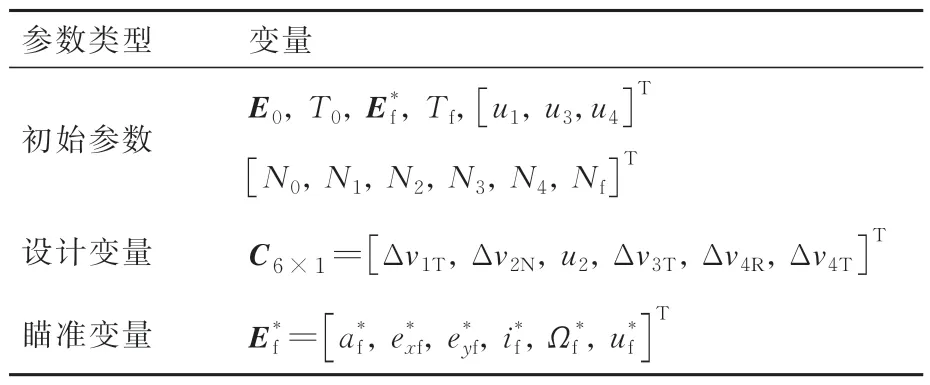
表3 变轨点纬度幅角指定的新四脉冲交会导引策略Table 3 New 4-impulse rendezvous guidance law with angular position constraint of maneuvers
与表2 方案相比,第4 次的变轨设计变量由纬度幅角u4变为径向分量Δv4R,从而将第1、3 和4 次变轨的纬度幅角均固定下来,进而通过对变轨点纬度幅角位置的设计,满足变轨过程的测控条件。对于第2 次平面外修正,由于修正点可在2 个平面交线处且相位相差180°的2 个位置中任选其一,考虑到测控弧段覆盖范围约占单圈时长的2/3 左右,因此总能通过选择其中一端作为变轨位置保证变轨过程测控条件。具体计算时根据计算得到的纬度幅角对应的测控条件进行判断,进而可以确保所有的变轨点均在测控弧段覆盖范围内。
根据表3 可知,上升器四脉冲交会方案的目标瞄准变量为交班点时刻的6 个轨道根数E*f。设计变量C6×1为
因此,上升器远程导引策略求解问题,转化为求非线性方程式(7)根的问题:
即:求 解C*,满 足E*f=G(C*)。第5 节 将 给 出式(7)的具体求解方法。
5 交会策略求解
多圈多脉冲交会策略的求解本质上是求解式(7)描述的非线性方程根的问题。由于问题的非线性,一般采用基于微分修正算法的迭代求解策略。对于一般的非线性方程求根问题,需要建立设计变量C与终端状态E*f偏差传递关系然后在给定的初值CIG后,采用如下牛顿迭代格式求解:
当|ΔCk|<ε后,迭代在第n步停止,最终获得方程的解:C*=Ck+1。其中,ε为预设的收敛精度阈值,矩阵Φ+为矩阵Φ的伪逆,可以采用奇异值分解的方法进行求解。首先根据近圆轨道偏差方程求得初始估计,然后采用微分修正获得精确数值解。
5.1 近圆偏差方程
根据初始轨道参数E0和目标瞄准轨道参数,可以构造一个参考圆轨道,具体轨道参数为:半长轴ar=(a0+a*f)/2,根据ar进而可以求得参考圆轨道的速度Vr;轨道倾角ir=(i0+i*f)/2;升交点赤经
将交会过程的轨道参数相对参考圆轨道进行线性化,可以得到相对参考圆轨道要素a,ex,ey,i,Ω的偏差与RTN 坐标系下速度增量分量间关系的近圆轨道偏差方程
1)平面内方程
2)平面外方程
3)相位方程
式中:Δa=a-ar,为半长轴偏差;Δex和Δey为偏心 率 矢 量 分 量 的 偏 差,Δex=ex,Δey=ey;Δi=i-ir,为轨道倾角偏差;ΔΩ=Ω-Ωr为升交点赤经偏差;Δφi为各次变轨到终端时刻的相位差:
Δθ为初始状态不变轨预报到终端时刻的总相位差:
5.2 初值猜测算法
根据近圆轨道偏差方程的相位方程式(11),第1 个脉冲对调相起到最主要的作用。忽略其他脉冲对相位的影响,可以计算出第1 个切向脉冲Δv1T的初始估计ΔvIG1T为
根据初始轨道参数E0,采用二体轨道外推到首脉冲的纬度幅角u1,加上变轨速度增量Δv1T后,就可以计算得到Δv1T后的轨道参数E+1为
进而可计算出第1 次变轨后的平面内轨道参数偏差为
根据平面内近圆轨道偏差方程式(9),可以得出平面内的线性方程为
令状态矩阵Φ为
因此,平面内变轨参数的初始估计为
式中:
根据平面外的近圆轨道偏差方程式(10),可以求得第2 次法向变轨参数的初始估计为
根据式(21)计算得到2 组不同的ΔvIG2N和uIG2结果,选择满足测控可见性纬度幅角范围内的uIG2,以及对应的ΔvIG2N作为第2 次法向变轨参数的初始估计。
至此,已经获得了所有设计变量的初始估计:
将式(22)代入二体轨道预报模型,可以计算出第k次迭代的脱靶量具体可以写为
根据式(14),可以构建Δukf与首脉冲速度增量的更新值Δvk1T+1为
根据ΔEkf再按照式(14)~式(21)进行计算,直至脱靶量Δukf满足要求。
5.3 微分修正迭代
为了获得问题的精确解,需要在给定初值CIG后,构造式(8)给出的状态转移矩阵Φ的表达式。下面给出推导过程。
在初始状态X0,终端状态Xf和各次变轨点间的自由飞行过程的轨道预报同时,可以同时获得各段的状态转移矩阵Φi+1,i(i=0,1,2,…,n-1)和Φf,n,由此可以获得各次变轨点到目标状态的
状态转移Φf,i(i=1,2,…,n-1),表达为
根据状态转移矩阵的定义,各次变轨点位置和速度偏差ΔXi=(Δri,Δvi)与终端状态的偏差ΔXf=( Δrf,Δvf)的关系可以表示为
根据实际工程任务需要,将各次变轨点的设计变量约定为轨道RTN 坐标系的3 个方向速度增量分量(ΔviR,ΔviT,ΔviN)以及变轨点的纬度幅角ui共4 个设计变量,可以满足实际工程任务的要求。下面将推导给出这4 个变量与ΔXi之间的状态转移关系。
1)3 个方向速度增量分量[ ΔviR,ΔviT,ΔviN]与ΔXi的关系
第i次变轨的状态变量ΔXi对RTN3 方向速度增量的偏导数为
式中:i RMCERTN表示第i次变轨点RTN 坐标系到MCE 坐标系转换矩阵。
2)变轨点的纬度幅角ui与ΔXi的关系
根据第i次变轨前的位置和速度,可以求得角动量矢量
计算瞬时角速度矢量为
定义第i次变轨的速度增量Δvi为
计算第i次变轨产生的加速度变化Δai为
第i次变轨的状态变量ΔXi对变轨时刻ti的偏导数为
因此,第i次变轨的状态变量ΔXi对变轨点纬度幅角ui的偏导数为
3)控制变量Ci与ΔXi的关系
定义第i次变轨的控制变量Ci为
各次变轨控制变量Ci与状态变量Xi之间的偏差传递关系ΦiX,C为
4)控制变量Ci与ΔEf的关系
第i次变轨的控制变量Ci与终端状态的Xf之间的偏导数传递关系为
各列可以分别由4 个6x1 的列向量组成,具体表示为
所以,各次变轨点控制变量偏差ΔCi与终端状态的偏差ΔXf关系进一步可以表示为
将式(37)转换为近圆轨道要素描述的终端微分修正方程:
式中:ΦEX是近圆轨道要素对位置速度的偏导数。
式(38)中一共有4N个控制变量(N为变轨次数),6 个目标变量。在实际应用中,需要根据任务需要,从4N个控制变量Ci中选择若干个控制变量,从6 个终端状态差ΔEf中选择若干目标变量组成问题相关问题求解。
5)上升器四脉冲方案状态转移矩阵
根据式(6)给出的上升器四脉冲交会方案的6 个设计变量,可以得到该方案对应的状态转移矩阵Φf,C将由如下部分组成:
因此,终端状态Ef和设计变量C的偏差传递关系可以写为
定义状态转移矩阵Φ为
因此式(40)可以改写为
在给定初值CIG后,采用迭代格式式(8),可以获得控制变量C的精确数值解。
5.4 纬度幅角优化
用于求解交会问题的边界条件和参数大多数已经在1.2 节根据工程任务约束和要求进行了确定,只剩下各次变轨点的纬度幅角需要确定。由于变轨点纬度幅角设计需要考虑变轨过程的测控弧段支持情况并兼顾整个任务速度增量最小,因此需要在交会策略求解后与整个交会策略进行联合优化设计,是一个典型的约束优化问题。5.4.1~5.4.3 节将对这一问题进行详细讨论。
5.4.1 变轨过程测控约束建模
变轨过程测控约束建模的目的是建立变轨点纬度幅角与测控约束条件的定量化关系。根据嫦娥五号上升器确定的变轨策略:在远程导引阶段采用4 台120 N 发动机实施轨道控制,并预留0.3 m/s 速度增量采用2 台10 N 发动机进行精确轨道控制。控制过程采用惯性定向模式。轨控前将探测器从对日定向姿态转为轨控定向姿态,姿态机动时长不超过15 min。变轨全过程的飞行时序如图5 所示。

图5 变轨过程时序Fig.5 Illustration of finite maneuver profile
为了确保变轨前调姿和发动机工作全过程在测控站监视下实施,从而保留最大限度的应急处置能力,因此,120 N 发动机开始时刻应大于进站时刻15 min 以上,10 N 发动机的关机时刻应小于出站时刻;进一步考虑进站时测站捕获时间,和出站前发动紧急关机应急指令的时间,进出站各留1 min 的时间。
因此,变轨过程需要满足调姿开始时刻大于进站时刻1 min 以上;发动机关机时刻小于出站时刻1 min 以上,从而确保变轨前姿态调整和变轨全过程在测控站监视下实施。据此,考虑到发动机实际的执行过程,可以折算出对变轨点纬度幅角范围的约束,具体如表4 所示。表4 的结果将作为后续变轨过程测控约束优化问题求解的重要输入条件。
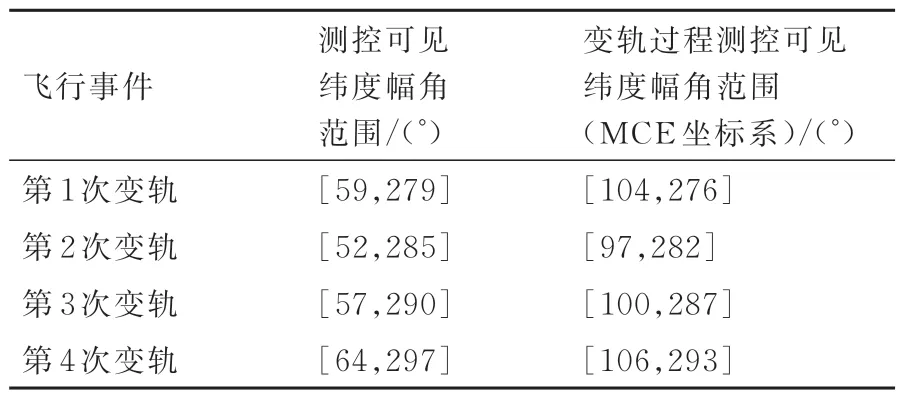
表4 交会对接变轨测控条件纬度幅角约束Table 4 Angular position constraint of rendezvous maneuvers
5.4.2 约束优化问题
变轨过程测控可见的最优导引策略设计问题可以描述成如式(43)所示的约束优化问题:
式中:ΔVtotal为变轨总速度增量;uLB1、uLB3和uLB4分别代表第1、3、4 次变轨纬度幅角的范围下限;uUB1、uUB3和uUB4分别代表第1、3、4 次变轨纬度幅角的范围上限。
可以看出,由于采用了纬度幅角作为设计变量,问题转化为简单的边界约束优化问题。而传统方法中,采用变轨点时刻作为设计变量,在处理测控约束时,问题将转化为非线性约束优化问题,问题的求解会困难得多。
5.4.3 约束优化问题的求解
理论上,可以采用任何一种优化算法对式(43)进行求解。但是,设计变量采用纬度幅角描述后,设计变量与优化目标间的关系变得更加简单、直接,通过单变量分析,可以得到物理意义清晰的结果,从而多变量优化问题的求解可以转化为多个单变量问题,降阶求解。下面将进行详细叙述。
1)第1 次变轨点位置调整
由于入轨后的轨道为偏心率约0.04 的小椭圆轨道,根据二体轨道动力学的规律,第1 次变轨能量最优的位置应该在远月点附近。因此,可以在此纬度幅角前后一定区间内遍历u1,然后使得u3和u4在[0,2π)范围内变化,计算对应给定u1,使得总速度增量ΔVtotal最小的解:uopt3和uopt4以及对应最小总速度增量ΔVopttotal。图6 给出了最小总速度增量ΔVopttotal随第1 次变轨纬度幅角u1的变化曲线。
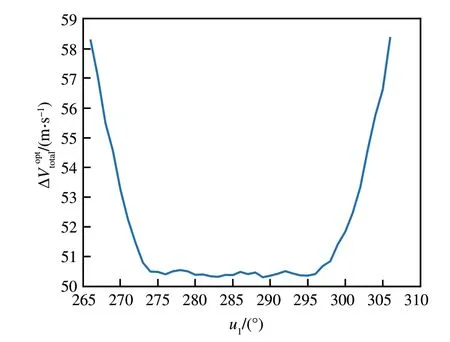
图6 第1 次变轨纬度幅角u1对速度增量的影响Fig.6 Relationship between and u1 of the first orbi tal maneuver
从图6中可以看出,u1的最优解在远月点附近,约为uopt1=285°,最优的速度增量约为50.5 m/s。当u1取为最优解uopt1后,u3和u4的变化对应的总速度增量ΔVtotal变化如图7 所示。
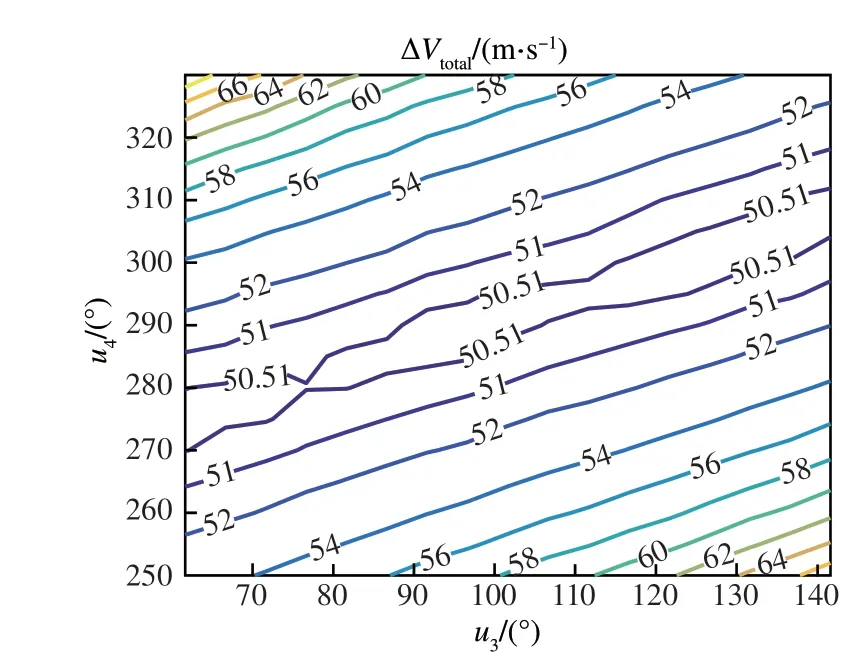
图7 第1 次变轨最优纬度幅角u3、u4对应的总速度增量Fig.7 Relationship between ΔVtotal and u3,u4 with optimal u1 of the first orbital maneuver
从图7 中可以看出,当u1为最优解时,u3和u4对应着若干近似的最优解,这对应着图中近似为一个条带的最小速度增量区域。因此,问题存在多个近似最优解。如果采用一般的优化算法求解,只能得到一个最优的结果,其多解特性很容易被错过。
在测控约束下,针对第1 次变轨点位置,采用图5 给出的变轨模型,为了确保全变轨过程可见,变轨纬度幅角将从285°调整为271°,从而确保关机点时刻调整到出测控站前1 min。
2)第3、4 次变轨点位置调整
当不考虑测控约束时,全局最优解对应着若干组满足要求的u3和u4。而当u1满足测控约束,放在非最优变轨位置后,u3和u4的特性发生了重大的变化。图8 给出了当u1=271°时,随u3和u4变化,总速度增量ΔVtotal二位等高线图。
从图8 中可以看出,当u1偏离最优位置,与最优位置相比,总速度增量明显增加。u3和u4不再成对出现形成最优解,而是呈现出各自单调变化的关系,但这对于分别确定u3和u4最优变轨位置非常有好处。u3是进站前测控条件不满足,根据测控条件分析结果,满足测控约束的u3范围是u3>101.0°。考虑到随着u3增加,总速度增量单调增加,因此u3的最优值确定为101.0°。类似地,u4的最优值确定为290.0°。最终确定的上升器的交会导引方案如表5 所示。
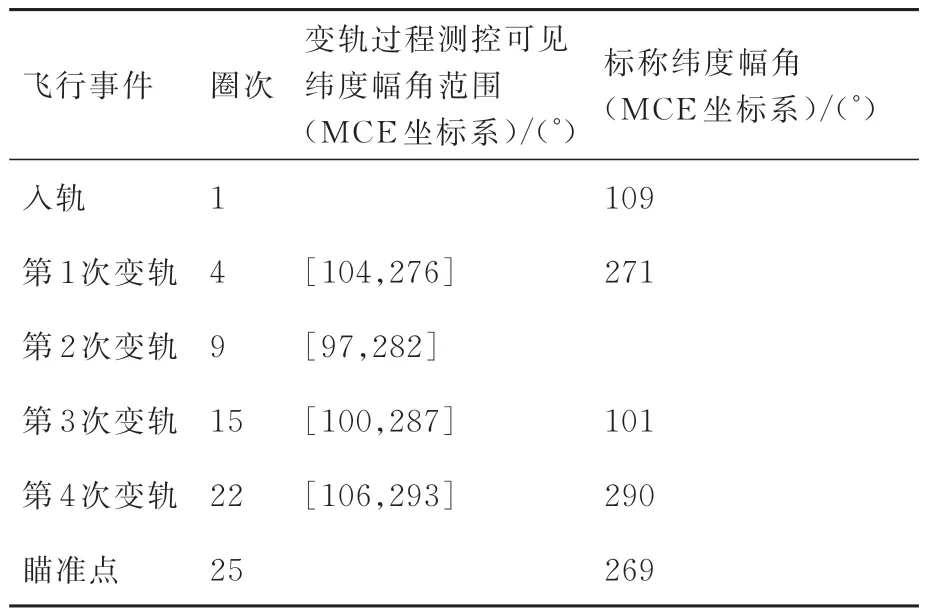
表5 上升器交会导引方案Table 5 Rendezvous scheme of ascender

图8 第3、4 次变轨点纬度幅角对速度增量的影响Fig.8 Relationship between ΔVtotal and u3、u4 of the third and fourth orbital maneuvers
入轨点和瞄准点标称参数如表6 所示。轨道面参数升交点赤经和倾角由任务的发射窗口和采样点位置共同决定。整个飞行过程的上升器远程引导策略如图9 所示。

图9 上升器远程导引策略Fig.9 Remote guidance strategy of ascender
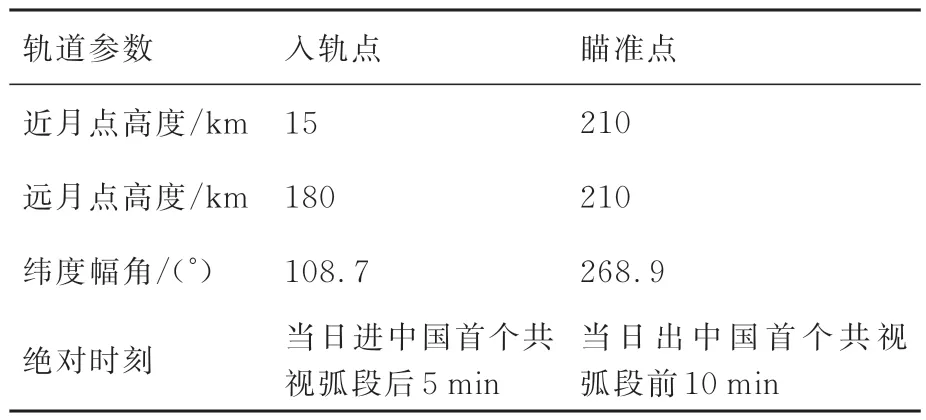
表6 入轨点及瞄准点参数Table 6 Parameters of initial orbit and aim point
6 嫦娥五号任务飞行实践
以嫦娥五号上升器远程导引在轨实施的实际策略为例,验证本文算法的有效性。
嫦娥五号任务上升器于北京时间2020-12-23 从月面起飞,根据入轨后的测定轨数据,上升器的远程导引入轨点参数如表7 所示。
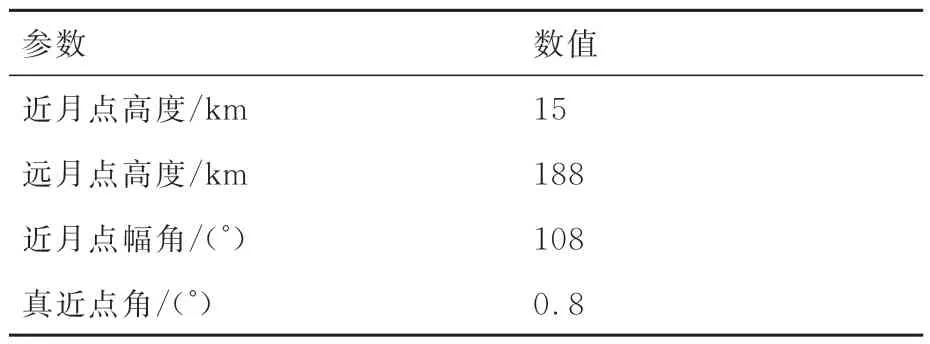
表7 上升器入轨点参数(MCE 坐标系)Table 7 Initial state of ascender (MCE coordinate system)
入轨后51 h,上升器到达交班点时刻。根据轨返组合体的定轨数据,以及图4 给出的交班点两器相对位置关系,计算得到的上升器交会调相瞄准点参数如表8 所示。
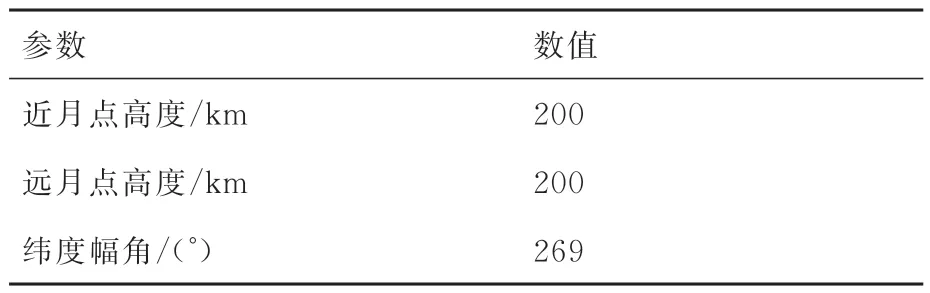
表8 上升器交班点目标参数(MCE 坐标系)Table 8 State of aim point (MCE coordinate system)
采用本文给出的变轨点位置约束下的燃料优化设计方法,得到上升器远程导引变轨控制策略如表9 所示,变轨飞行时序如表10 所示。

表9 上升器远程导引有限推力控制策略Table 9 Finite thruster maneuvers for ascender rendezvous phasing strategy

表10 上升器远程导引变轨飞行时序Table 10 Mission profile of ascender rendezvous phasing min
各次变轨过程与测控弧段的相对位置关系如图10 所示。与表5 的测控可见约束对比可知,各次变轨过程与测控弧段保持了设计的相对关系,所有变轨全过程均在测控弧段监视下完成,实施结果满足设计要求。
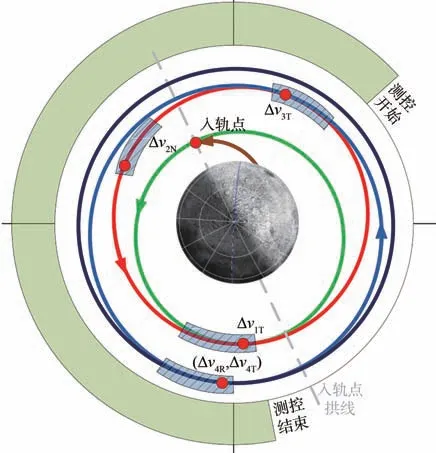
图10 变轨点位置示意图Fig.10 Angular position of maneuvers and tracking arc
文献[22]给出了嫦娥五号任务前期的交会轨道标称设计过程及方法,其实质是本文在第4 节表2 中给出的传统四脉冲交会策略。其在设计过程中也考虑了脉冲变轨点均在测控弧段内的工程约束,但是由于在设计中仅采用了脉冲模型,未考虑有限推力实施过程以及控前的调姿过程测控需求。这就造成了虽然各次脉冲变轨点都在测控弧段内,但在飞控过程中采用有限推力模型下,无法保证变轨及控前调姿过程的测控需求。此外,由于其第4 次变轨采用了传统的切向分量和纬度幅角 (Δv4T,u4)的组合模式,变轨位置是设计变量,无法通过主动设计确保第四次变轨过程与测控弧段的相对位置关系。由于上述原因,该策略无法满足实际飞控需求,如果采用这种策略将会给实际飞控实施造成很大的困难。
正是由于存在以上缺陷,文献[22]通过实际飞行结果与其策略比较也明确认识到:实际飞控实施所采用的策略与自己所设计的策略并不相同,进行了诸多调整。
相比之下,本文给出的策略完全克服了文献[22]策略的不足。不但考虑了图5 给出的变轨过程完整调姿和有限推力的飞行时序,还专门对规划策略进行了重新设计,将第4 次变轨的设计变量改为径向分量和切向分量 (Δv4R, Δv4T),使得变轨位置u4不再作为设计变量出现,从而可以通过指定u4来精确地保证第4 次变轨过程与测控弧段的相对位置关系。上述计算结果也表明,本文策略设计的结果与嫦娥五号实际飞控结果完全吻合,是嫦娥五号实际飞控所采用的策略。
另外需要指出的是,在月球背面遮挡条件下,确保所有变轨过程测控条件是嫦娥五号月球轨道交会策略区别于以往近地轨道交会策略的一个显著特征。文献[22]给出的策略与本文给出的策略从设计变量、约束条件和求解方法上均不相同,是2 种完全不同的策略,只有采用本文给出的全新的设计模型,通过严格数值求解才能得到与飞控实施完全吻合的结果。
本文给出的考虑变轨点测控约束的交会策略设计模型和方法为后续实施类似任务提供了重要的参考依据。
7 结 论
嫦娥五号任务于北京时间2020-12-06 完成月球轨道交会对接与样品转移,这是世界首次月球轨道无人交会对接任务。嫦娥五号月球轨道交会导引策略与以往任务均有很大不同,没有完全相同的方案可以直接采用。针对在月球轨道条件下的变轨过程全程测控可见的强约束要求,建立了以纬度幅角为变量的近圆轨道偏差方程,设计了各变轨点可精确指定位置的四脉冲变轨策略。将交会策略设计问题转化为约束优化问题,通过遍历各次变轨的纬度幅角进行了求解。结果表明:变轨点位置约束优化问题能量最优解是唯一的,仅存在于变轨点处于纬度幅角约束的边界处。本文提出的变轨点位置测控强约束下的交会导引策略优化求解方法及获得的全局特性规律将对后续中国嫦娥六号任务和未来的载人登月任务提供重要的参考。
