基于对数—双曲正切函数的自适应滤波算法及异常点识别
2023-04-13凌俊黄卓群李陶胜王淑芳夏燕玲
凌俊,黄卓群,李陶胜,王淑芳,夏燕玲
(1.安庆职业技术学院,安徽安庆,246003;2.安徽电信规划设计有限责任公司,安徽合肥,230031)
0 引言
轮式移动机器人通常采用磁条导航来预设行驶路线,将磁条粘贴在地面上,机器人循迹磁条来进行移动。在行驶过程中,由于实际环境较为复杂,例如磁条两侧会有各种不同的磁性物质而导致的磁条磁场发生变化使得传感器获取到包含异常点的信号,从而降低了机器人的行驶平稳性,严重时甚至会引起脱轨现象。目前基于最小均方误差LMS 算法的自适应滤波器被广泛的应用于系统辨识或系统建模、信号处理等多个领域,但在具体的应用中,始终存在收敛速度与稳态误差两者之间的矛盾,为了解决这一矛盾,多种改进的LMS 变步长算法被提出[1~7],包括基于Sigmoid 函数变步长最小均方算法、归一化的最小均方算法(NLMS)等,主要可以归结为用误差来控制滤波器迭代步长和利用梯度向量来控制步长。文献[8]提出了一类基于Sigmoid 函数的鲁棒自适应滤波算法,该算法优于相应阶数的广义最大熵准则。文献[9]推导了Prob-LMS 算法的均值偏差和均方偏差,给出了算法的蒙特卡洛仿真,表明算法的优势。文献[10]提出了一种基于审查回归的可变步长LMS,该算法的收敛速度相对于D-LMS 有所提升。文献[11]提出了一种可变步进大小仿射投影符号算法(APSA),其鲁棒性可抑制脉冲噪声。文献[12]提出了一种鲁棒的可变步长NLMS 算法,优化了后验误差的平方。另外,在文献[13~17]中,研究了各种不同算法对自适应滤波的影响。表1 给出了几种常见变步长权值更新的表达式。本文提出了一类基于对数-双曲正切代价函数的鲁棒自适应滤波算法,其权重更新是基于梯度最速下降法, 在所提出的代价函数框架的基础上,实现了自适应滤波器更快的收敛速度和更小的稳态误差[18~20]。本文的工作主要包括:提出了一类基于对数-双曲线正切代价的鲁棒自适应滤波算法,验证该算法的稳定性,以及用仿真结果表明该算法的性能。

表1 常见变步长权值更新
1 代价函数设计
自适应滤波器的期望输出定义如下:
定义估计误差ke为:
其中 1kw-是optw在第 1k- 次迭代时的估计值。我们利用双曲正切函数 tanh(x)和一个正常数α( 0 <α< 1)来定义所提出的代价函数,我们根据对数—双曲正切函数,将新的代价函数JT(k)定义为:
其中,J(ek)是具有高阶统计量的不同自适应滤波的常规代价函数。(4)中定义的tanh 代价函数框架关于权重向量wk-1的导数为:
其中, ∇wk-1J(ek)是常规代价函数的梯度。当参数α选择不同数值时,对数—双曲正切代价函数JT(k)与误差信号ek之间的关系如图1 所示,梯度函数 ∇wk-1J(ek)和误差信号ek的关系如图2 所示。

图1 α 不同时代价函数和误差信号关系

图2 α 不同时梯度函数和误差信号关系
另外,代价函数JT(k)有以下性质:
性质1:代价函数JT(k)在ek∈( -∞,+∞ )上是凹函数
2 对数—双曲正切最速下降算法
本文提出的鲁棒自适应滤波算法的权重向量的更新方程可以表示为:
其中,µ是滤波器的步长,0 1µ< < ,将式(5)带入(6)可得:
根据不同的常规代价函数,我们可以基于提出的代价函数框架得出不同的鲁棒自适应滤波算法。
权重更新公式可以统一表示为:
其中,f(ek)是非线性误差函数。fcon(ek)是相应的常规误差非线性函数。使用不同的代价函数J(ek),我们可以得到不同的误差更新方法和自适应滤波器,其中包括对数-双曲正切最小均方(LHTLMS)算法,对数-双曲正切绝对(LHTA)算法,对数-双曲正切均值第四(LHTF)算法。将这几种算法进行对比,对比结果如表2 所示。
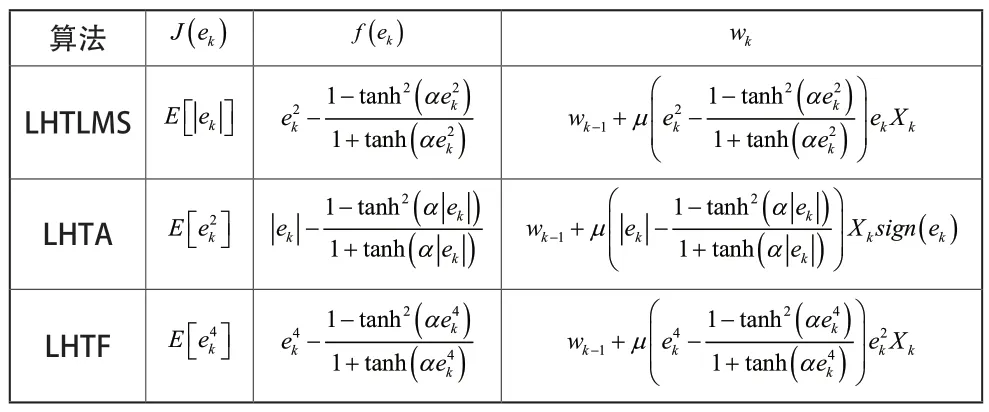
表2 比较基于LHT成本的自适应滤波器
3 性能分析
为了验证算法的效果,并使后文的分析易于处理,我们先给出以下五个假设:
(1)测量噪声kv是零均值独立且均等分布高斯随机序列,并且与输入信号kX无关。
(2)先验误差ea,k为零均值,并且独立于测量噪声vk。
(3)自适应滤波器足够长,使得对于任何常数矩阵∑以及对于所有k、都为高斯联合,而f2(ek)不相关。
(4)输入信号{Xk}为零均值,即具有自相关矩阵
3.1 稳定性分析
我们定义权重向量误差,先验误差、加权先验误差分别为:
其中∑表示对称正定权矩阵。 因此,系统输出误差与先验误差之间的关系为:
根据上式(15)能够得到需要估计的稳态超额均方误差(EMSE)。对(15)式取极限k→∞,再带入其中可求得EMSE,为了便于表达,我们将得到的稳态EMSE 通过ξ表示为:
其中ξT表示所提出算法的稳态EMSE,而ξcon表示相应常规算法的稳态EMSE。因为我们知道 - 1 < tanh (αek2)< 1,所以能够得到:
接下来,我们研究稳态均方差(MSD)。首先,将MSD 定义为:
选择 ∑ =R-1,再运用假设(4),MSD 可以表示为:
其中L 是滤波器长度,Tr(R)是矩阵R 的迹,当MSD满足上述条件时,滤波器能够达到稳定。
3.2 均方稳定性
将滤波器的形式表示为:
其中:λ是与使用估计随机量的相关的克拉美-罗下界。将常数矩阵∑设置为I,最终可以得到:
当滤波器的步长满足上述条件时,滤波器能够达到均方稳定。
4 算法验证
在本文的设计中,我们选取的轮式搬运机器人的简易模型如图3 所示。

图3 整车样机图
在本节中,我们通过仿真来验证LHTLMS 算法,学习曲线与迭代次数之间的关系如图4 所示。根据仿真结果可以看出,在选取 =1α时,曲线的效果较好,且迅速下降并趋于稳定。

图4 LHTLMS 算法在α=1 时的学习曲线
根据实验结果仿真图,可以看出,对于LHTLMS 算法,当 =1α时,算法的收敛速度要比 =0.1α时更快,在达到收敛后的曲线平稳性更好,并且权值w更新在达到一个相对稳定的状态后的效果是要优于 =0.1α时的效果的,在 =0.1α时,权值迭代后的曲线并不是很稳定,产生的波动较大。在相同的环境下,对LHTA 和LHTF 算法仿真后,根据仿真结果,可以得出,在改进的这一类算法中,对数-双曲正切均值第四算法(LHTF)的收敛速度和稳定性都要优于另外两个算法,在进行少数迭代之后,学习曲线就能达到稳定状态,不产生任何波动,并且权值更新的稳定性也更好,曲线更加平稳,接近于直线。因此在对磁导航信号的滤波过程中,LHT类算法能够起到较好的滤波效果,在这类算法中,LHTF 算法能的较于另外两种算法更好。

图5 LHTLMS 算法在α=1 时权值更新
将所提出的算法与具有相同迭代次数的LMS算法比较,可以看出,在相同的迭代次数下,与传统的LMS 算法相比,新提出的算法具有更好的收敛性和稳定性,能在迭代次数很小时就达到较小的稳定误差和收敛条件。
5 总结
在本文中,根据仿真结果,与LHT 类算法对比,在相同的模拟含野点信号的混合信号的采集情况下,LHT 类算法的收敛速度是要优于LMS 和signLMS 的速度,尤其是LHTF 算法的收敛速度,且在达到稳定状态之前,LHT 类算法的波动是小于LMS 和signLMS 算法的。LMS 算法的权值w更新的速度和效果比LHTLMS 更快,但效果与LHTF算法在 =1α时相比时相差无几,且优于signLMS 算法。signLMS 算法的权值更新结果在达到稳定后仍然会在一个小范围内波动,当α取0.1 和1 时,算法的权值更新结果基本相同,但 =1α时的收敛速度是快于 =0.1α的,这个结果与LMS 算法的结果是相似的。另外,我们对提出的算法进行了均方误差分析,求解出均方稳定性的条件。同时,仿真结果验证了理论推导的正确性。仿真结果表明,新提出的一类算法的稳态误差保持在一个较小的区间,比LMS 算法等具有更好的稳定性和更快的收敛速度。

图6 LHTLMS 算法在α=0.1 时的学习曲线

图7 LMS 算法在α=1 时的学习曲线
