基于AUTBUS 的传感器数据采集系统研究与设计
2023-04-13李敏郭彦蕊
李敏,郭彦蕊
(1.湖南瀚能科技有限公司,湖南长沙,410221;2.长沙硕博电子科技股份有限公司,湖南长沙,410221)
0 引言
对于大型货物堆叠类的仓库中,垛位上堆叠的货物规格种类繁多,由于缺乏智能化的监控手段,无法获取货物放置的位置信息,库管员通常需要在入库和出库环节去垛位现场查看确认货物所在位置才能保证库存数据的准确性。这种信息化程度偏低的管理方式,不仅存在着人车碰撞、纸包倾倒的安全隐患,而且容易导致仓储运行效率低、人力成本和运行成本高、仓储数据准确度低、盘点移库作业耗时耗力[1]等问题。针对这些情况,本文提出了一种基于AUTBUS 通讯的传感器数据采集系统,通过获取安装在货物位置上方的传感器距离数据,实现货物库存位置的自动精确定位,省去了人工核查货物环节,避免了人车碰撞及货物倾倒等安全隐患。
1 AUTBUS 技术
AUTBUS 是一种采用两线非桥接媒介的高速现场总线[2],其总线数据带宽达到100Mbps,最大传输距离500米,最小循环周期8 微秒,最大节点数256 个,其同步精度不低于10ns。同时,AUTBUS 结合了Profibus、CAN、Ethernet IP、Profinet 等总线的优点,采用双绞线无极性传输,具有带宽高、实时能力强、传输距离远、布线和安装简单等特点,适用于传感器设备之间高可靠大宽带的数据传输场景,在仓库传感器数据采集系统中得到了广泛应用。
AUTBUS 协议栈包括物理层、数据链路层和应用层三部分。物理层基于OFDM 技术,完成物理信号的转换,以实现高可靠性传输。物理层向数据链路层提供时钟管理服务、数据传输服务和物理层管理服务三大类接口。数据链路层包括LLC 和MAC 两个子层,它向应用层提供时钟同步服务、数据链路服务和数据链路管理服务三大接口。应用层包括数据服务模块、系统管理服务模块、时间服务模块和TCP/UDP 模块。
AUTBUS 采用总线式组网,主要有直线型和环型拓扑两种结构,分别如图1、2 所示。直线型拓扑结构布线施工简单、接线方便,两端需要匹配终端电阻。环型拓扑结构不需要匹配电阻,且主干线上任意位置断开都不影响总线通讯,但信号反射严重,不适用于远距离场合。

图1 直线型拓扑结构

图2 环型拓扑结构
2 数据采集系统组成
数据采集系统由传感器、信号转换器、边缘控制器组成。数据采集系统结构图如图3 所示,n 路CAN 接口传感器通过CAN 通讯组网后接入CAN 转AUTBUS 信号转换器中,信号转换器通过AUTBUS 总线进行组网并接入边缘控制器中,边缘控制器将传感器的数据进行分析处理后,发送到远程服务器端。传感器数据通过CAN 转换为AUTBUS 通讯后,解决了CAN 通讯存在的通讯速率低、传输距离较短的问题。系统中各信号转换器节点连接采用直线型拓扑结构方式,在首末两端信号转换器节点处匹配终端电阻,实现了仓库传感器数据远距离和高速率传输,减少了丢包率。由于AUTBUS的无极性双绞线连接特性,现场布线、施工更为简单方便,避免了因线接反造成的通讯故障,减少了调试工作。
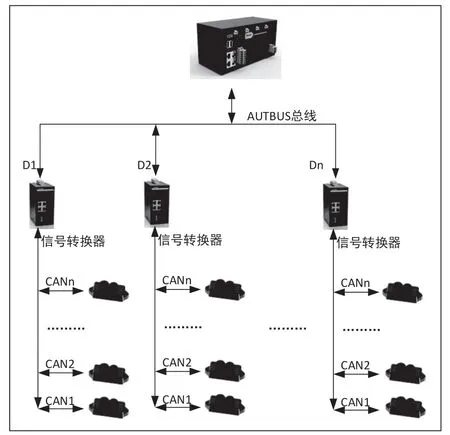
图3 数据采集系统结构拓扑图
2.1 传感器
测距传感器目前主要有激光测距传感器、超声波测距传感器和红外测距传感器三种。其中,激光测距传感器具有测量精度高、测量距离远、环境适应性更强等优点,广泛应用于室内精确测距和避障的应用场合。本次选用单点激光测距传感器[3],基于飞行时间原理测量传感器与被测目标之间的相对距离。激光发射器发出调制脉冲激光,内部定时器从t1时刻开始计算,当激光照射到目标物体后,激光接收器接收到返回的激光信号时,在t2时刻停止计时,设光速为C,则激光传感器到达物体的距离D 为:
传感器选用CAN 通讯接口方式,相比于485 通讯和串口通讯而言,其具有高可靠性和高实时性,传输距离更远,抗干扰能力更强。传感器的技术规格参数如表1 所示。
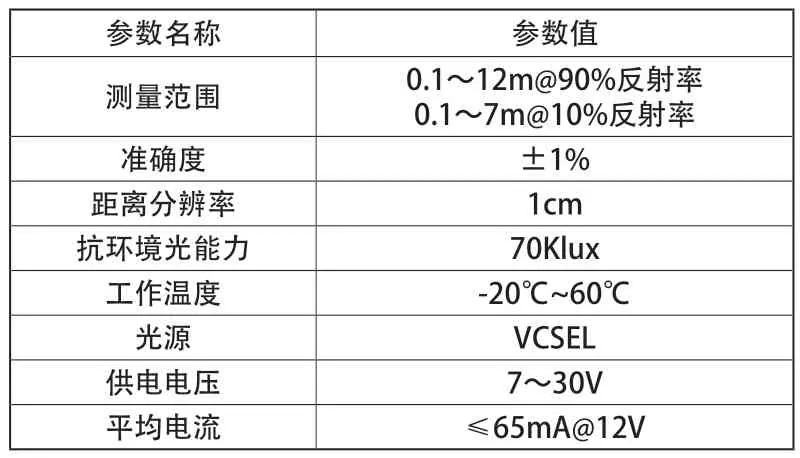
表1
仓库高度为7m,每堆货物上方安装一个激光测距传感器,每个传感器具有唯一的设备ID。传感器按10Hz 的发送频率发送距离数据,波特率设为250kbps,服务器端通过传感器ID和距离变化信息迅速识别到具体位置的货物高度信息发生变化,实现货物库存位置的精确定位。传感器通过龙骨架安装固定在仓库顶部,仓库现场安装照片如图4 所示,图中黑色的小长方体为传感器。

图4 现场传感器安装照片
2.2 信号转换器
信号转换器实现通讯协议的转换,负责将CAN 通讯转换为AUTBUS 通讯,这样解决了CAN 通讯远距离传输下带宽的问题,保证仓库内部多个传感器检测到的距离数值能实时可靠地传输到边缘控制器中进行处理。
信号转换器主芯片采用高度集成的工业现场总线Soc--KY3001,它是一款性能卓越的32 位高速处理器,支持AUTBUS、CAN、Profibus、Modbus 总 线 接 口,AP-CPU采用ARM 公司的cortex-A5 内核,最高支持400MHz 的运行速率,内置512k 字节的SRAM。KY3001 优越的性能和丰富的总线接口,能够快速将CAN 组网的传感器数据转换为AUTBUS 通讯方式。
KY3001 供电电压有3.3V、1.8V 和1.2V 三种,通过供电电路将外部输入的7 ~30V 的电压进行转换,同时控制供电电压纹波,以保证芯片有更好的信号质量。时钟电路选用无源晶体或有源晶振的时钟电路,要求时钟频率为25MHz,时钟精度<10ppm。KY3001 自带2 路CAN 接口,通过CAN 驱动器实现CAN 总线的高速发送和接收功能[4]。芯片的AUTBUS 接口通过驱动电路实现AUTBUS 总线数据的高速收发。

图5 信号转换器硬件框图
2.3 边缘控制器
边缘控制器选用NewPre5100 自主可控基础型边缘通用控制器,它集边缘运算、过程控制等功能为一体[5],采用国产龙芯2k1000,双核心,主频1.0GHZ,支持双机热备冗余,1ms 控制周期,支持CANOPEN、Modbus、Ethernet、AUTBUS 等常用工业通讯协议。NewPre5100采用工业级设计,具有强实时性和高可靠性,能实时批量处理分析传感器的数据内容。
3 AUTBUS 布线规范
考虑到仓库现场环境的复杂性,为了提高AUTBUS 通讯的可靠性和抗干扰能力,在实际布线时,需要采取以下措施。
(1)AUTBUS 总线采用差分信号传输方式,通常使用带屏蔽的双绞线且屏蔽层应该接到参考地。
(2)AUTBUS 总线分支的线长应≤0.25m,传输线缆的特征阻抗约为100Ω。
(3)为避免信号反射,在AUTBUS 总线两端需要连接终端电阻,电阻阻值为100Ω。
(4)AUTBUS 线 缆 衰 减 参 数 要 求1MHz ≤1.0 dB/100m,32MHz ≤5.0 dB/100m。
(5)采用T 型连接器时,连接器需要有2 根内芯作为差分信号针,且回波损耗≤ -10dB@0~32MHz。
4 系统软件设计
数据采集系统软件基于边缘控制器NewPre5100 为硬件平台,在Maview 开发环境下进行开发。软件主要实现的功能包括以下几点:
(1)通过CAN 转Autbus 通讯,完成多个传感器数据的采集;
(2)对传感器数据进行分析处理组合,将数据信息同步发送到远程服务器端;
(3)实时监测功能,当底层传感器通讯故障时及时报警提示;
(4)实时通讯连接,与远程服务器端连接断开时能迅速建立连接。
4.1 软件总体设计
软件程序整体流程图如图6所示,软件功能模块组成如图7所示,软件包括Autbus 通讯模块、数据接收模块、数据处理模块、故障诊断模块、断线重连模块和Modbus TCP 通讯模块这五个功能模块组成。
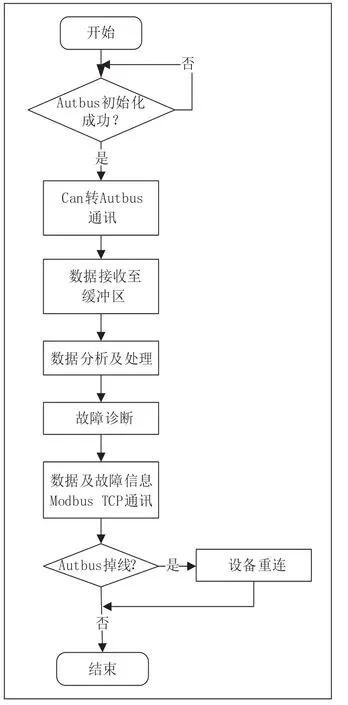
图6 软件程序整体流程图
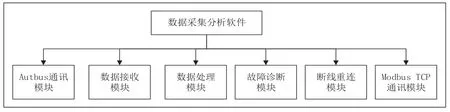
图7 功能模块组成
4.2 设备组态
在Maview 开发环境下进行设备组态,如图8 所示。首先配置边缘控制器的IP 地址和端口号等参数,接着为控制器添加PHB 总线,并在总线上添加多个PHB 设备,每个PHB 设备表示1 个CAN 转AUTBUS 信号转换器。在每个PHB 设备的属性列表中,设置唯一的设备ID、循环周期和设备类型。

图8 设备组态界面
4.3 传感器数据接收
在接收传感器数据前,首先调用结构体AUT_INIT_0 对AUTBUS 模块进行初始化,设置AUTBUS 模块的ID 和波特率,如果初始化成功,软件返回不为0 的AUTBUS 模块描述符和为0 的初始化状态值。根据描述符或初始化状态值,可以判断AUTBUS 是否初始化成功,从而进入数据接收模块。
调用AUT_RECV_0 结构体接收传感器数据,输入AUT BUS 模块描述符,软件返回传感器ID、传感器发送的数据、数据长度以及接收状态。接收状态包含3 种情况,0 表示接收到CAN 报文,2 表示没有收到CAN 报文,3 表示接收错误。在接收状态为0 时,对传感器数据进行解析,读取不同传感器ID 发送过来的距离值和信号强度值。传感器数据接收模块的部分代码如图9 所示。

图9 数据接收部分代码
4.4 数据监控与调试
边缘控制器对传感器数据进行分析处理后,通过Modbus TCP 协议与服务器端建立通讯连接。为了方便现场调试,在服务器端编写传感器数据监控软件,实时监测传感器传输过来的距离数据和信号强度。将传感器、信号转换器和边缘控制器进行通电后,在监控页面输入控制器的ip地址,点击“start”按钮,获取传感器的距离信息和信号强度,距离数据监控页面如图10 所示,信号强度监控页面如图11所示。通过距离信息可以看出每个传感器安装高度基本一致,且每个传感器通讯正常,距离测量精度满足系统需求。每个传感器的信号强度都在300 以上,被测物体的反射率较高。

图10 距离数据监控页面

图11 信号强度监控页面
5 结论
采用Autbus 通讯方式搭建的数据采集系统,将布局在仓库不同库位的传感器数据进行实时监测和数据分析,对货物的位置进行精确定位,大大提升了库存数据的准确率和出入库效率,整个系统布线简单、可靠性高、数据传输实时性强。该方案配合仓储管理系统软件,目前已在某造纸厂仓库管理系统中得到了推广和应用,为堆叠类货物的智能化仓储管理提供了新的解决方案。
