基于变系数滑模控制器的风电机组振动主动控制研究
2023-04-12张世界魏静汤宝平吉科峰


收稿日期:2022-01-06
基金项目:国家重点研发计划(2018YFB2001602);中央高校基金项目(SKLMT-ZZKT-2021Z02)
通信作者:魏 静(1978—),男,博士、教授,主要从事传动机械学和机电传动系统动力学等方面的研究。weijing_slmt@163.com
DOI:10.19912/j.0254-0096.tynxb.2022-0022 文章编号:0254-0096(2023)05-0407-09
摘 要:基于某公司新型8 MW半直驱式风电机组传动链实际参数建立传动链机电控耦合模型,设计机侧变流器速度环变系数滑模控制器,通过采用改变控制策略来增强风电传动链抗干扰能力并减小传动链零部件横向振动。结果表明:当风电机组受到外部突变激励时,在变系数滑模控制器控制下发电机转子对速度追踪效果更好、机械部件横向振动位移显著减小且发电机电流及电磁转矩中的机械频率得到有效抑制。
关键词:风电机组;动力学;传动链;滑模控制;机电耦合
中图分类号:TM315 文献标志码:A
0 引 言
近年来,清洁能源受到各国青睐[1]。风能由于技术成熟、储量丰富、受限少而得到快速发展,对可再生能源贡献最大[2]。随着风电机组增多,风电机组故障造成损失越来越大,风电机组动态特性研究变得愈发重要,风电机组传动链振动抑制成为业界研究热点之一。目前,对风电机组动态特性及振动抑制研究多是分开进行。机械领域学者研究风电机组动态特性时多将发电机等效为负载转矩或质量块,如孙黎等[3]忽略发电机研究了海上风电机组传动链动力学行为;谭建军等[4]将发电机简化为单自由度圆盘,对风力机传动链刚柔耦合模型进行动态特性研究;张爱强等[5]将发电机等效为负载转矩研究重力下风力机传动系统动态特性。电控领域学者多将机械传动链等效为简单质量块来研究风电机组特性,如张琛等[6]将风力机轴系等效为两质量块模型来研究有功控制回路对系统扭振的影响;解大等[7]将传动链简化为三质量块建立风力机机电模型;David等[8]和Moodi等[9]将机械传动链等效为两质量块模型来研究控制系统对风力机特性的影响。这些研究忽略了风电齿轮箱详细结构,而风力机故障中高达59%故障与齿轮箱相关[10-11],故研究风电系统动态特性时齿轮箱不可忽略。少部分学者对风力机进行机电耦合研究,如庞辉庆等[12]针对双馈风电机组,研究了基于卡尔曼滤波的传动链扭振控制;秦大同等[13]采用集中质量法建立风电机组机电耦合模型,研究了齿轮振动对电流谐波的影响;Girsang等[10]在Matlab中构建传动链系统,使用虚拟控制器改变系统闭环特性来控制系统振动;Ghosh等[14]将传动链简化为集中质量块来研究变速风力机机电特性。但通过主动控制来抑制风力机传动链振动的研究尚少。
本文根据实际参数建立风电机组多自由度传动链机电模型,针对控制系统设计变结构滑模控制器(sliding mode control,SMC)并对其进行改进,从而研究主动控制对风电传动链机械部件振动的影响。分析风电机组在不同控制策略下传动链主要部件动态响应,验证本文所设计变系数SMC具有更好鲁棒性且在振动抑制方面效果明显。
1 风电机组传动链模型
该半直驱型风力机传动链包括机械传动系统和电气系统。机械传动系统采用两级行星+一级平行齿轮结构,电气系统中发电机采用中速永磁发电机、控制系统采用转速电流双闭环控制。
1.1 机械系统建模
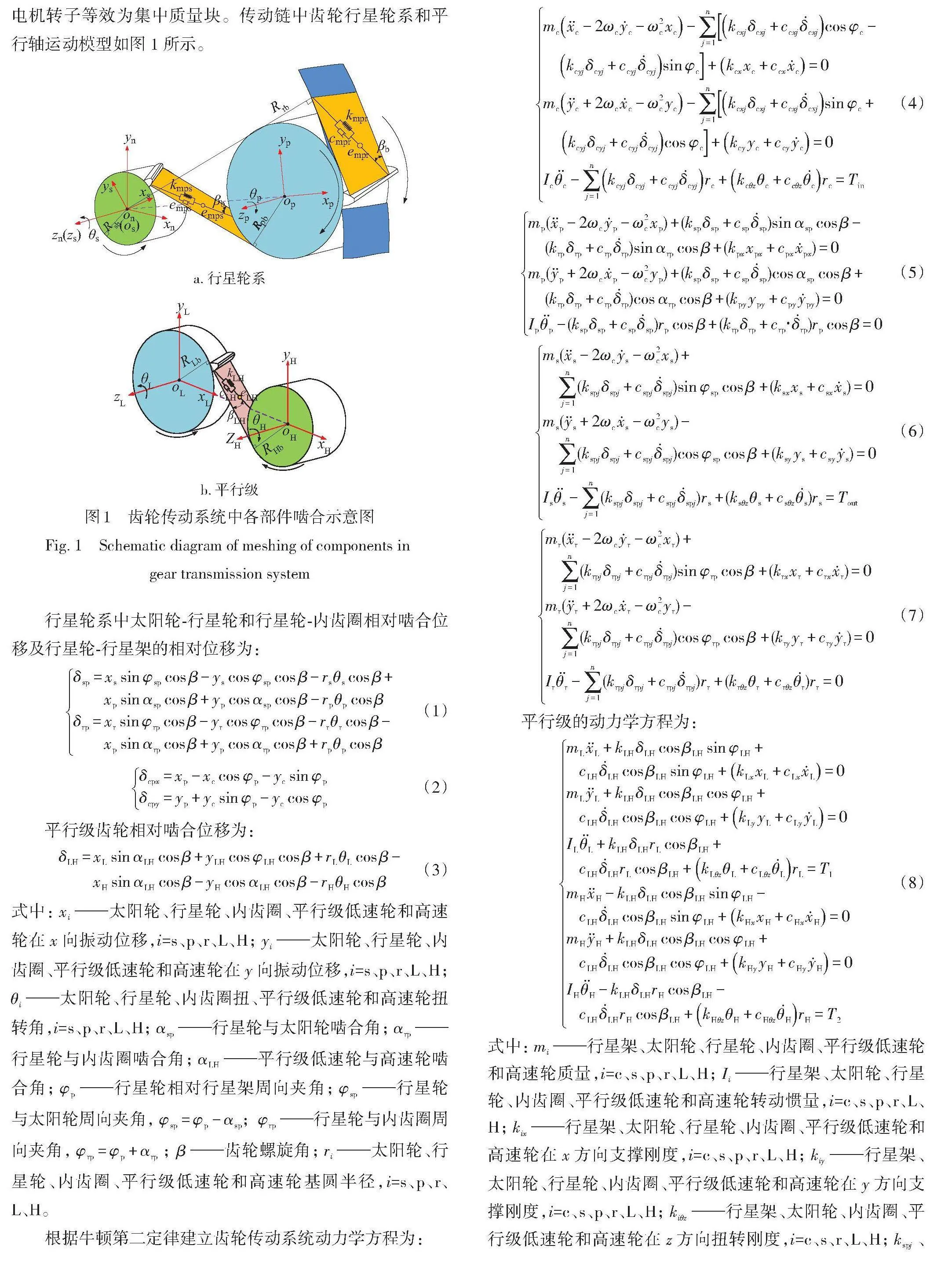
风力机机械系统主要包括叶轮、主轴、齿轮箱、电机轴及电机转子[15]。叶轮将气动力矩转换为机械转矩并通过主轴带动齿轮箱运动,最终带动发电机运动将机械能转换为电能。本文传动链模型中将所有轴单元等效为弹簧阻尼模型,齿轮箱采用三自由度模型,太阳轮轴分为太阳轮和轮轴,发电机转子等效为集中质量块。传动链中齿轮行星轮系和平行轴运动模型如图1所示。
行星轮系中太阳轮-行星轮和行星轮-内齿圈相对啮合位移及行星轮-行星架的相对位移为:
[δsp=xssinφspcosβ-yscosφspcosβ-rsθscosβ+" " " xpsinαspcosβ+ypcosαspcosβ-rpθpcosβδrp=xrsinφrpcosβ-yrcosφrpcosβ-rrθrcosβ-" " " xpsinαrpcosβ+ypcosαrpcosβ+rpθpcosβ] (1)
[δcpx=xp-xccosφp-ycsinφpδcpy=yp+ycsinφp-yccosφp] (2)
平行级齿轮相对啮合位移为:
[δLH=xLsinαLHcosβ+yLHcosφLHcosβ+rLθLcosβ-" " " "xHsinαLHcosβ-yHcosαLHcosβ-rHθHcosβ] (3)
式中:[xi]——太阳轮、行星轮、内齿圈、平行级低速轮和高速轮在[x]向振动位移,i=s、p、r、L、H;[yi]——太阳轮、行星轮、内齿圈、平行级低速轮和高速轮在y向振动位移,i=s、p、r、L、H;[θi]——太阳轮、行星轮、内齿圈扭、平行级低速轮和高速轮扭转角,i=s、p、r、L、H;[αsp]——行星轮与太阳轮啮合角;[αrp]——行星轮与内齿圈啮合角;[αLH]——平行级低速轮与高速轮啮合角;[φp]——行星轮相对行星架周向夹角;[φsp]——行星轮与太阳轮周向夹角,[φsp=φp-αsp;φrp]——行星轮与内齿圈周向夹角,[φrp=φp+αrp];[β]——齿轮螺旋角;[ri]——太阳轮、行星轮、内齿圈、平行级低速轮和高速轮基圆半径,i=s、p、r、L、H。
根据牛顿第二定律建立齿轮传动系统动力学方程为:
[mcxc-2ωcyc-ω2cxc-j=1nkcxjδcxj+ccxjδcxjcosφc-kcyjδcyj+ccyjδcyjsinφc+kcxxc+ccxxc=0mcyc+2ωcxc-ω2cyc-j=1nkcxjδcxj+ccxjδcxjsinφc+kcyjδcyj+ccyjδcyjcosφc+kcyyc+ccyyc=0Icθc-j=1nkcyjδcyj+ccyjδcyjrc+kcθzθc+ccθzθcrc=Tin] (4)
[mp(xp-2ωcyp-ω2cxp)+(kspδsp+cspδsp)sinαspcosβ-" (krpδrp+crpδrp)sinαrpcosβ+(kpxxpx+cpxxpx)=0mp(yp+2ωcxp-ω2cyp)+(kspδsp+cspδsp)cosαspcosβ+" (krpδrp+crpδrp)cosαrpcosβ+(kpyypy+cpyypy)=0Ipθp-(kspδsp+cspδsp)rpcosβ+(krpδrp+crp∙δrp)rpcosβ=0] (5)
[ms(xs-2ωcys-ω2cxs)+" " j=1n(kspjδspj+cspjδspj)sinφspcosβ+(ksxxs+csxxs)=0ms(ys+2ωcxs-ω2cys)-" " j=1n(kspjδspj+cspjδspj)cosφspcosβ+(ksyys+csyys)=0Isθs-j=1n(kspjδspj+cspjδspj)rs+(ksθzθs+csθzθs)rs=Tout] (6)
[mr(xr-2ωcyr-ω2cxr)+" " j=1n(krpjδrpj+crpjδrpj)sinφrpcosβ+(krxxr+crxxr)=0mr(yr+2ωcxr-ω2cyr)-" " j=1n(krpjδrpj+crpjδrpj)cosφrpcosβ+(kryyr+cryyr)=0Irθr-j=1n(krpjδrpj+crpjδrpj)rr+(krθzθr+crθzθr)rr=0] (7)
平行级的动力学方程为:
[mLxL+kLHδLHcosβLHsinφLH+" cLHδLHcosβLHsinφLH+kLxxL+cLxxL=0mLyL+kLHδLHcosβLHcosφLH+" cLHδLHcosβLHcosφLH+kLyyL+cLyyL=0ILθL+kLHδLHrLcosβLH+" cLHδLHrLcosβLH+kLθzθL+cLθzθLrL=T1mHxH-kLHδLHcosβLHsinφLH-" cLHδLHcosβLHsinφLH+kHxxH+cHxxH=0mHyH+kLHδLHcosβLHcosφLH+" cLHδLHcosβLHcosφLH+kHyyH+cHyyH=0IHθH-kLHδLHrHcosβLH-" cLHδLHrHcosβLH+kHθzθH+cHθzθHrH=T2] (8)
式中:[mi]——行星架、太阳轮、行星轮、内齿圈、平行级低速轮和高速轮质量,i=c、s、p、r、L、H;[Ii]——行星架、太阳轮、行星轮、内齿圈、平行级低速轮和高速轮转动惯量,i=c、s、p、r、L、H;[kix]——行星架、太阳轮、行星轮、内齿圈、平行级低速轮和高速轮在[x]方向支撑刚度,i=c、s、p、r、L、H;[kiy]——行星架、太阳轮、行星轮、内齿圈、平行级低速轮和高速轮在[y]方向支撑刚度,i=c、s、p、r、L、H;[kiθz]——行星架、太阳轮、内齿圈、平行级低速轮和高速轮在[z]方向扭转刚度,i=c、s、r、L、H;[kspj]、[krpj]——行星轮分别与太阳轮和内齿圈啮合刚度;[cix]——行星架、太阳轮、行星轮、内齿圈、平行级低速轮和高速轮在[x]方向支撑阻尼,i=c、s、p、r、L、H;[ciy]——行星架、太阳轮、行星轮、内齿圈、平行级低速轮和高速轮在[y]方向支撑阻尼,i=c、s、p、r、L、H;[ciθz]——行星架、太阳轮、内齿圈、平行级低速轮和高速轮在[z]方向扭转阻尼,i=c、s、r、L、H;[Tin、Tout]——行星架输入转矩和太阳轮输出转矩;[T1、T2]——平行级低速轮输入转矩和高速轮输出转矩;[ωc]——行星架转速;[n]——行星轮数量;[j]——行星轮编号。
最终,将两级行星轮系与平行级的动力学方程联立,形成机械系统动力学方程为:
[Mx+Cx+Kx=F] (9)
式中:[M]——质量矩阵;[C]——阻尼矩阵;[K]——啮合刚度矩阵;[F]——外力矩阵。
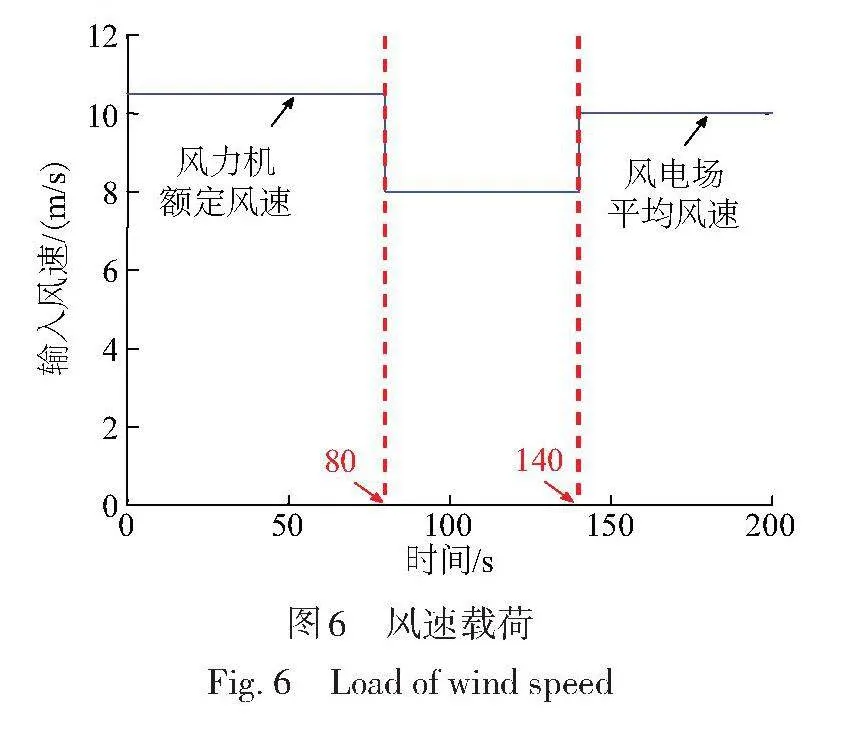
本文使用某公司设计8 MW风电齿轮箱参数如表1所示。传动链中齿轮系统啮合刚度和阻尼根据齿轮传动设计手册计算得到,轴的扭转刚度和阻尼由材料力学计算得到,零部件支撑刚度由Romax提取得到,结果如表2所示。
1.2 发电机模型
风电机组中永磁发电机参数如表3所示。假定发电机气隙磁场均匀分布、忽略磁阻磁损、忽略磁槽效应且发电机三相电压对称[16]。永磁发电机数学模型为:
[usausbusc=RsRsRsisaisbisc+ϕsaϕsbϕsc] (10)
[ϕsa=Laaisa+Labisb+Lacisc+ϕfcosθGrϕsb=Lbaisa+Lbbisb+Lbcisc+ϕfcosθGr-120°ϕsc=Lcaisa+Lcbisb+Lccisc+ϕfcosθGr+120°] (11)
当气隙均匀时且发电机为星形连接时,式(11)为:
[ϕsa=Lsσ+1.5Lmisa+ϕfcosθGrϕsb=Lsσ+1.5Lmisb+ϕfcosθGr-120°ϕsc=Lsσ+1.5Lmisc+ϕfcosθGr+120°] (12)
式中:[usa、usb、usc]——发电机三相电压;[isa、isb、isc]——发电机三相电流;[ϕsa、ϕsb、ϕsc]——发电机绕组磁链;[ϕf]——发电机定子磁链;[Laa、Lbb、Lcc]——每相绕组自感;[Lba、Lab]、[Lbc、Lcb、Lac、Lca]——绕组互感;[Lsσ]——定子电感;[Lm]——等效励磁电感;[θGr]——转子位置角。
永磁发电机较复杂,建立三相运动方程求解困难,为方便研究,将永磁同步电机经过Park变换和Clark变换[16],发电机坐标变换示意图如图2所示。最终发电机数学模型为:
[id=udLd-RsLdid+LqLdωGriqiq=uqLq-RsLqiq-LdLqωGrid-ϕfLqωGr] (13)
[Te=1.5peϕfiq+(Ld-Lq)idiq)] (14)
式中:[id]——[d]轴电流;[iq]——[q]轴电流;[Ld]——[d]轴电感;[Lq]——[q]轴电感;[ωGr]——电角速度;[Te]——电磁转矩;[pe]——极对数量。
根据转矩平衡,发电机转子运动方程为:
[Tm=Te+Jdωmdt+Bfωm] (15)
式中:[Tm]——高速轴输出转矩;[ωm]——转子角速度;[J]——转子转动惯量;[Bf]——发电机转子摩擦系数。
风电机组中机械部分与电气部分耦合关系如图3所示。当风电机组系统处于平衡状态时,机械转矩与电磁转矩达到平衡,式(9)中的外力矩变为:
[F=Tair,0,…,-Te] (16)
式中:[Tair]——风力机输入气动转矩。
2 变系数滑模控制器设计
风电机组采用[id=0]双闭环矢量控制策略。PI控制具有参数整定简单、技术成熟等优点,但积分环节动态特性较差、对外界扰动抑制能力弱且对非线性系统控制效果差[17];SMC控制对参数扰动不敏感,具有较强鲁棒性和抗干扰能力[18],本文通过设计变系数滑模速度控制器来提高系统抗干扰能力从而抑制机械系统振动。永磁同步发电机在d-q坐标下运动数学模型为:
[dωmdt=TmJ-3peϕf2Jiq-BfωmJ] (17)
当采用[id=0]时,[Te=1.5peϕf/iq];忽略发电机摩擦时[Bf=0]。对于PMSG采用转速环控制,选取发电机状态变量为:
[x1=ω∗m-ωmx2=x1=-ωm] (18)
则有:
[x1=-ωmx2=-ωm] (19)
由式(16)~式(18)可得:
[x1=ω*m-ωmx2=x1=-Tm/J+1.5peϕf/Jiqx2=1.5peϕf/Jiq] (20)
设计滑模面:
[s=c1x1+x2] (21)
则有:
[s=c1x1+x2=c1x2+1.5peϕf/Jiq] (22)
为保障系统动态品质,采用可变系数指数趋近律:
[s=-xaεsgns-xbks] (23)
则转速环滑模控制律为:
[iq=2J3peϕf-x1aεsgn(s)-x1bks-c1x2] (24)
选取李亚普诺夫函数[V=s2/2],根据稳定性理论,为使系统稳定,需满足文献[19]:[dV/dt=sslt;0],由于[V=ss=][sc1x2+1.5peϕf/Jiq=][-sx1aεsgns+x1bks]
因此只要[εgt;0、][kgt;0]就能满足条件,则式(24)变为:
[iq=2J3peϕf-x1aεsgn(s)-x1bks-c1x2] (25)
为了降低滑模控制器抖振现象,sgn函数被式(26)函数替代。
[Q(s)=ss+v] (26)
最终滑膜控制器电流为:
[iq=2J3peϕf-eaεss+v-ebks-c1x2] (27)
滑模控制器结构如图4所示,将机械系统-发电机-控制系统耦合最终形成风电机组机电控系统如图5所示。
3 SMC控制下风电机组动态特性
为验证本文所设计控制器在传动链振动控制方面品质,将本文所设计控制器下风电机组动态特性与传统PI控制器下风电机组动态特性进行对比。
3.1 外部载荷设定
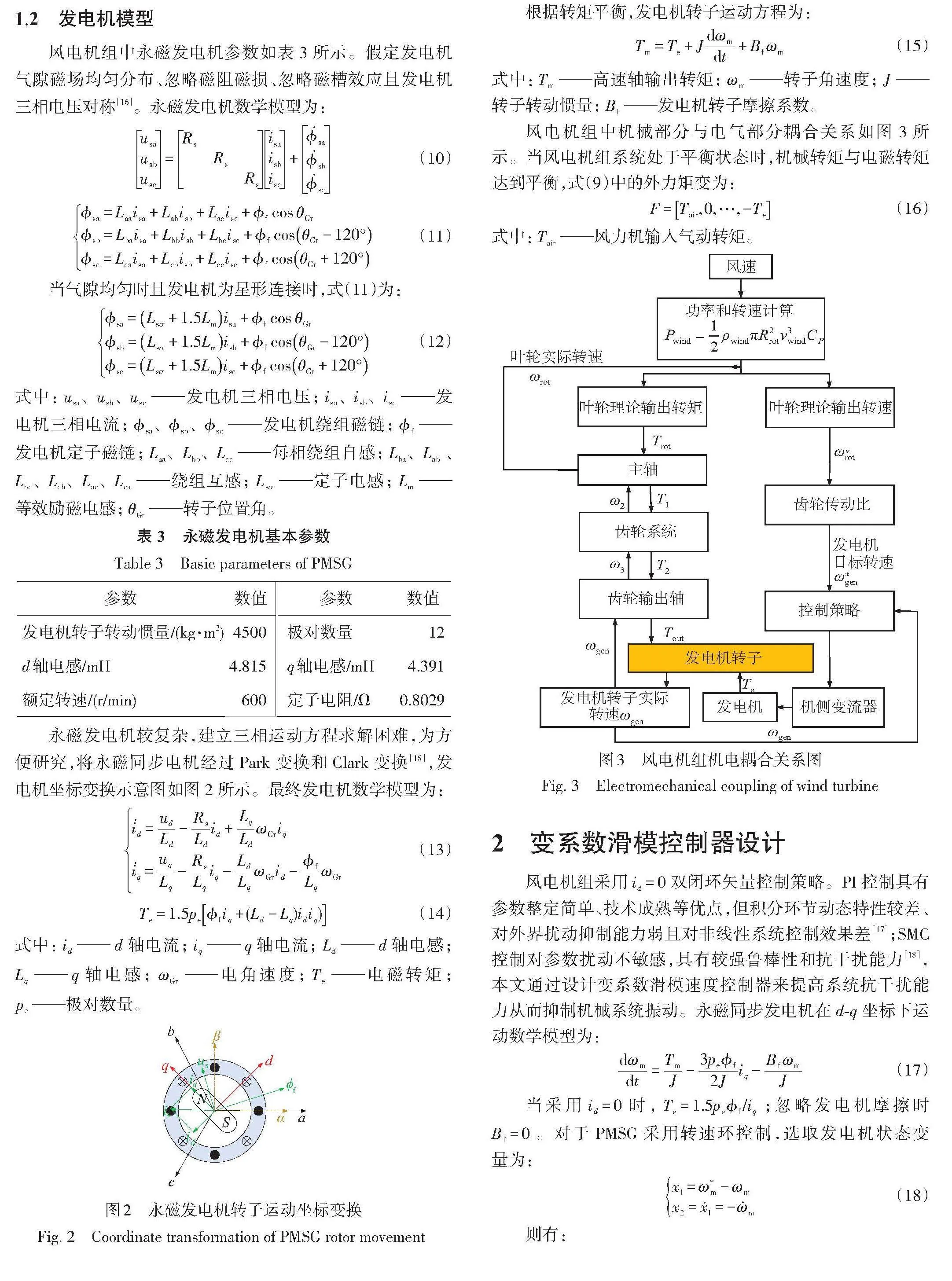
由某公司所提供参数可知,该风电机组额定风速为10.5 m/s,风电机组所在风电场年平均风速为10 m/s。因此,设定初始外部风速为风电机组额定风速,当系统达到稳定后在80 s处风速突变为8 m/s,在140 s处风速突变为风电场年平均风速,风速给定如图6所示。
3.2 动态响应分析
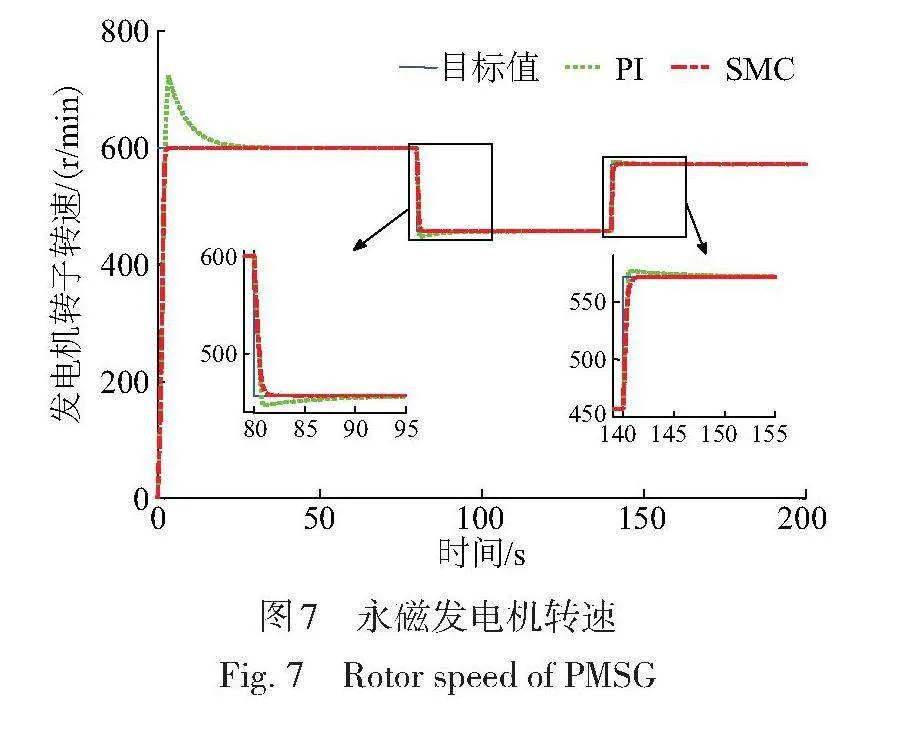
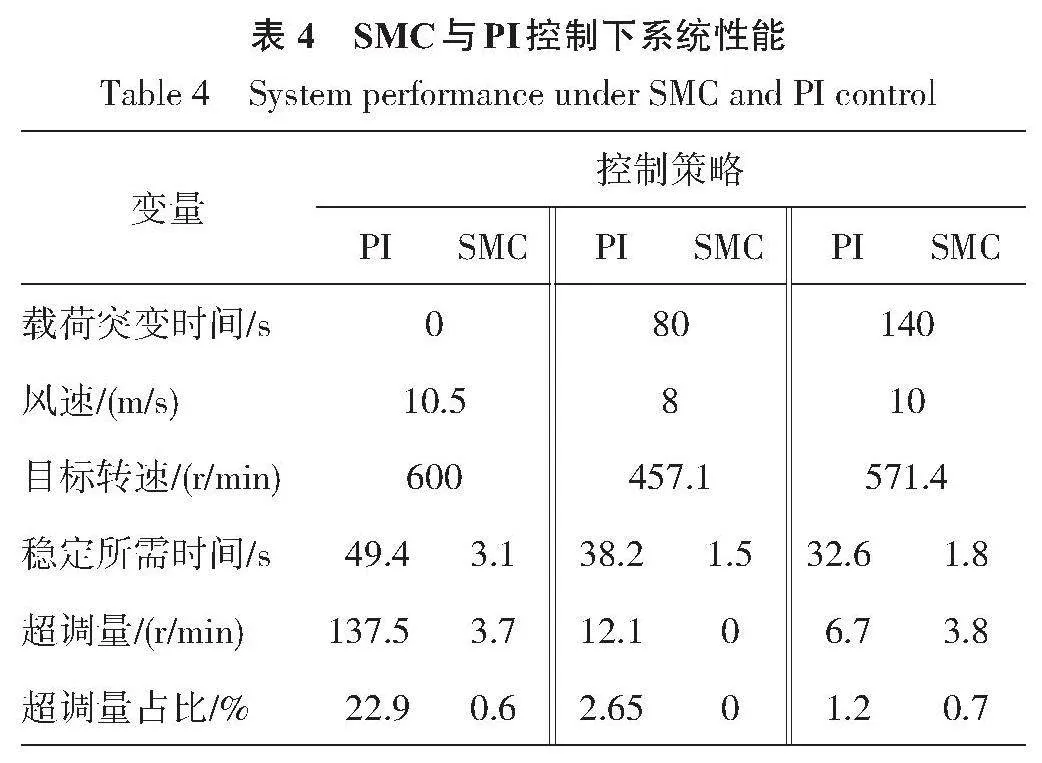
由于风电机组传动系统中零部件较多,故在进行传动链动态响应分析时仅以传动系统各级输出轮为例进行振动响应分析。在额定风速下,发电机达到额定转速600 r/min,图7为风电机组在外部给定风载荷下发电机转子转速。表4为SMC和PI控制下系统达到稳定所需时间及超调量。
由图7和表4可知,当系统启动后在SMC控制下系统达到稳定状态所需时间为PI控制下的6.28%,SMC控制下发电机达到稳定状态过程中产生的超调量为PI控制下发电机转速超调量的2.69%;当80 s,外界风速突变为8 m/s时,SMC控制下系统达到稳定所需时间为PI控制下所需时间的3.93%,
发电机转速不产生超调现象;当140 s,外界风速突变为风电场年平均风速时,SMC控制下系统达到稳定所需时间为PI控制下所需时间的5.52%,发电机转速产生超调量为PI控制下发电机超调量的56.72%。通过发电机达到稳定所需时间和转速超调量来看,在SMC控制下系统更快达到稳定状态,发电机对目标转速追踪效果更好。
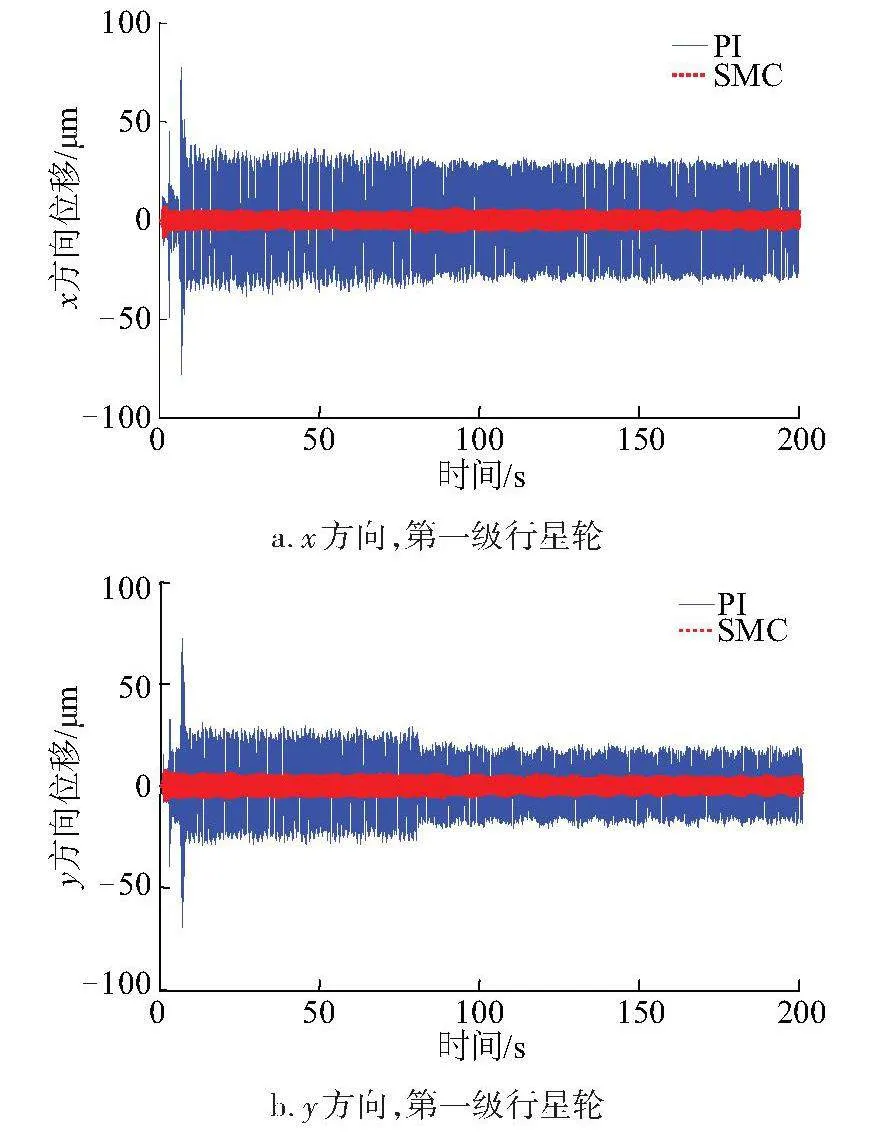
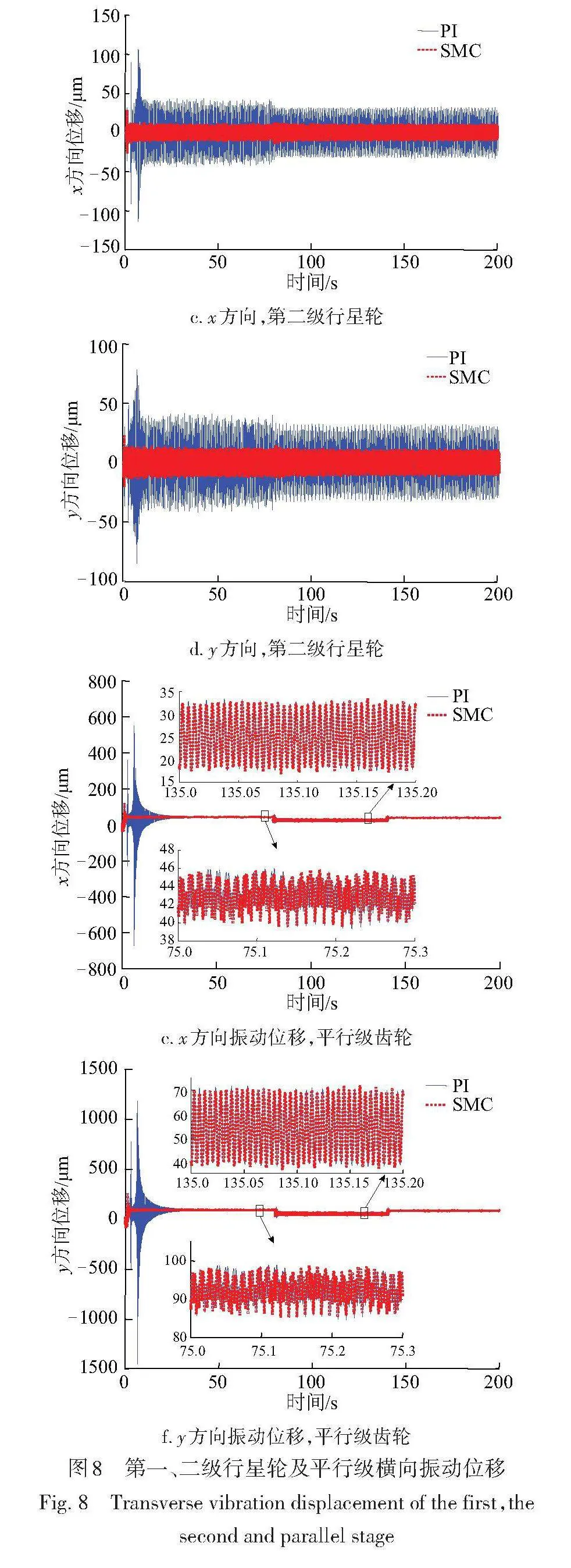
为研究不同控制策略对风电机组振动影响,以风电机组传动链中齿轮箱各输出级部件横向振动来对比分析。图8为风电机组传动链中齿轮箱各输出级部件横向振动位移。不同风况时SMC控制下太阳轮横向振动位移小于PI控制下太阳轮横向振动位移。表5为风电机组在额定风速下传动系统中齿轮箱各构件横向振动位移。由表5可知,当发电机侧变流器采用变系数SMC控制策略时,第一级太阳轮、行星轮、内齿圈和行星架在[x]方向振动位移分别为5.10、6.13、3.03和1.81 μm,各构件在[x]方向振动位移比在PI控制下分别减小85.60%、66.97%、84.66%和88.33%;在[y]方向振动位移分别为5.97、2.43、2.71和1.78 μm,各构件在[y]方向振动位移比在PI控制下减小79.05%、85.83%、77.66%和62.95%。
同理,第二级行星轮系中太阳轮、行星轮、内齿圈和行星架在SMC控制下[x]方向振动位移比在PI控制下降低72.45%、71.86%、66.95%和76.83%,[y]方向振动位移比在PI控制下降低68.68%、70.01%、60.55%和69.36%;平行级低速轮和高速轮在x方向振动位移分别降低0.19%和2.40%,在[y]方向振动位移分别降低0.13%和3.33%。因此,与PI控制下齿轮箱各构件振动位移对比可知,在SMC控制下齿轮箱各部件横向振动位移均减小,且行星轮系各部件振动位移减幅均在60%以上,最大可达88.33%;平行级齿轮横向振动位移减小较少,不足4%,最小仅为0.13%,可忽略。
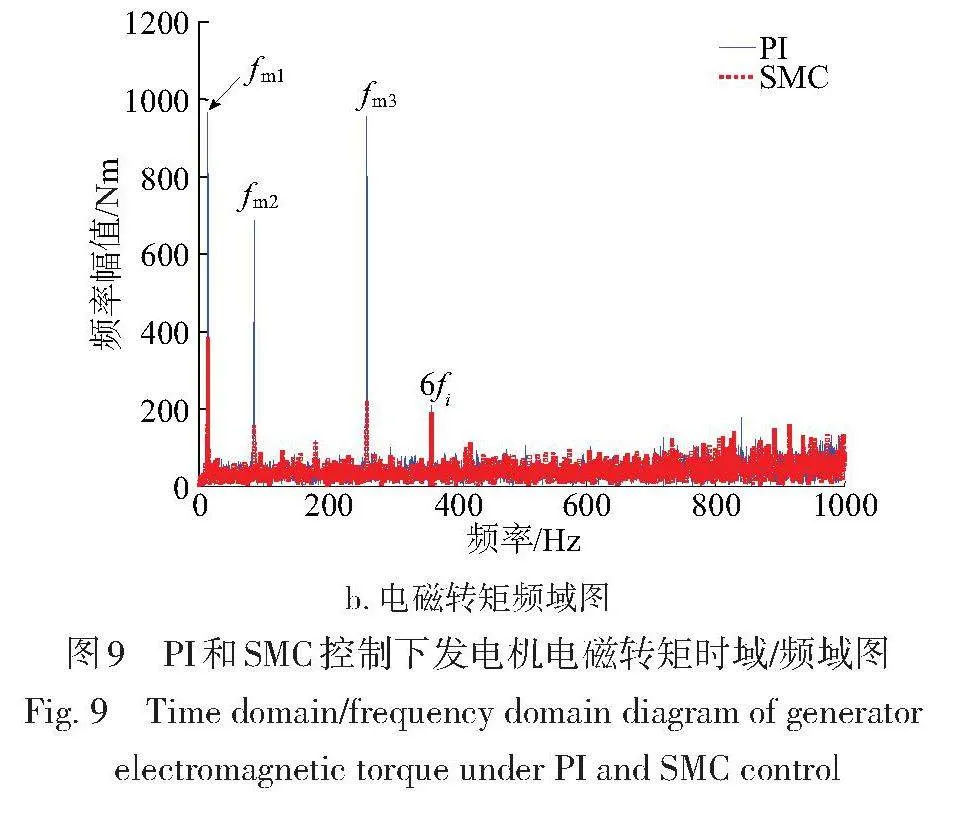
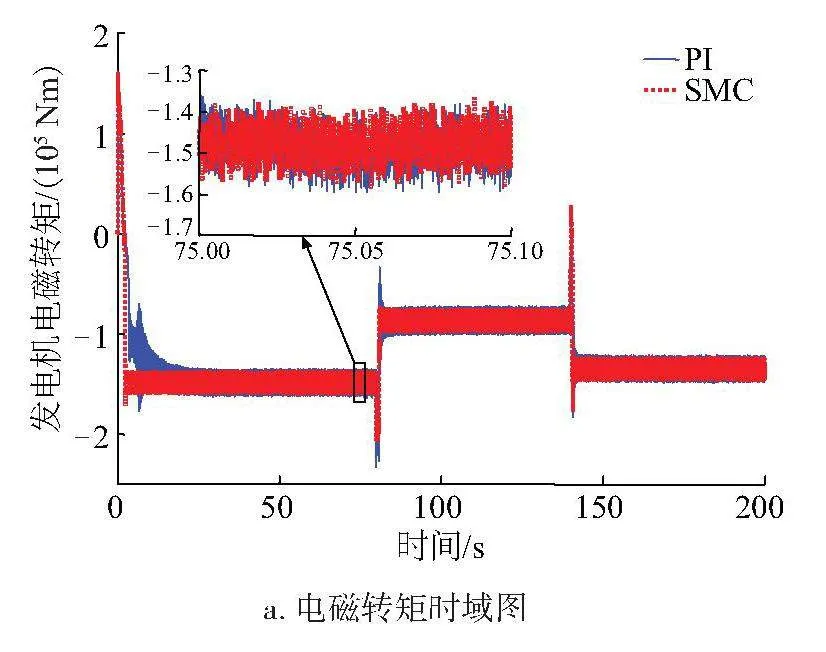
图9为风电机组中永磁发电机电磁转矩时域和频域图。由图9a可知,当发电机稳定后不同控制策略下电磁转矩幅值基本相同;当风电机组风况发生变化时,发电机电磁转矩变化也较小。由图9b可知,在PI控制下发电机电磁转矩频率中出现各级齿轮啮合频率[fm1、fm2]和[fm3],此外还出现了发电机空间谐波[6fi];在SMC控制下,发电机电磁转矩中[fm1]、[fm2]和[fm3]幅值明显降低,机械系统对电磁转矩影响在频域减小。
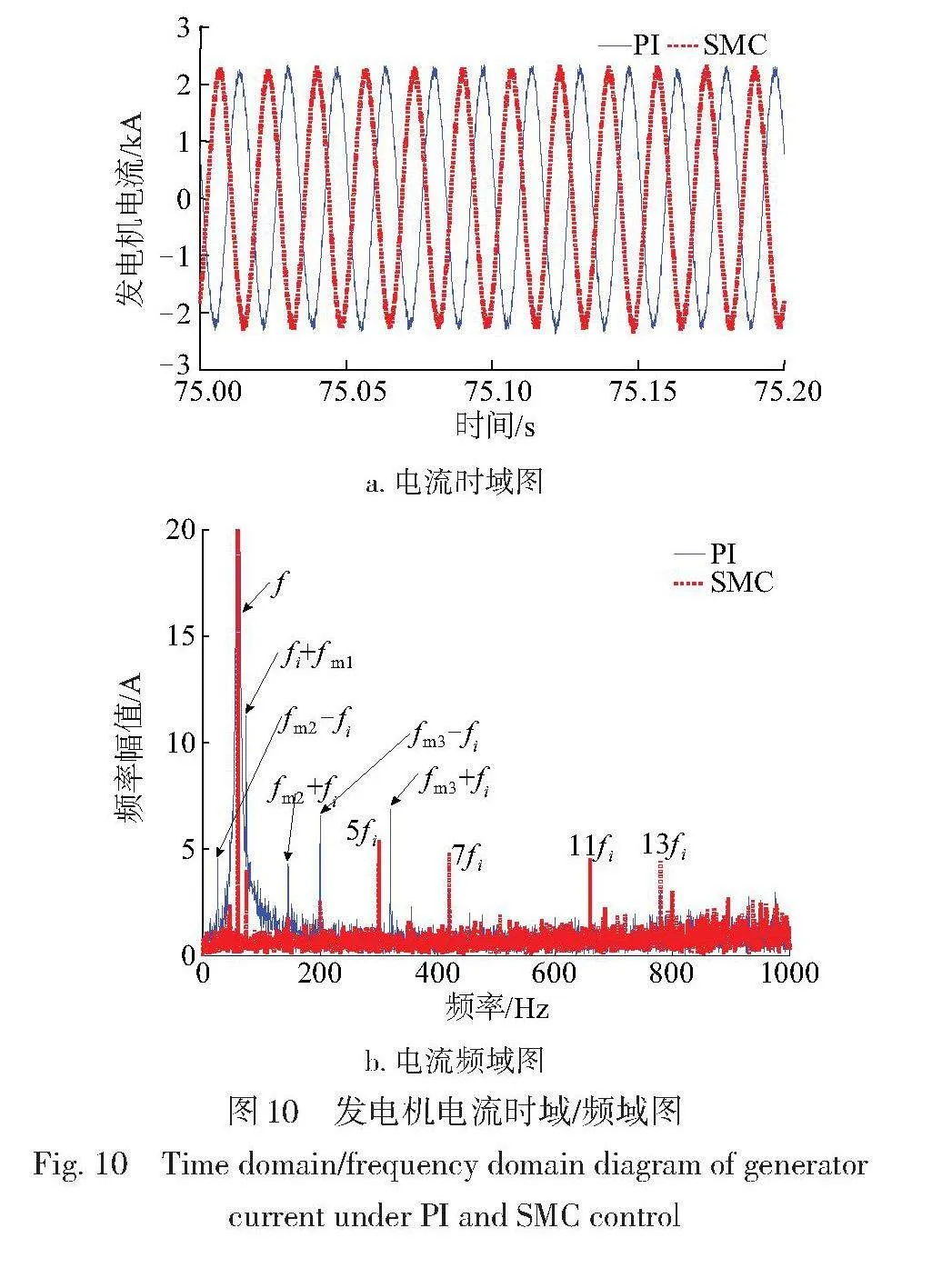
图10为风电机组在额定工况下永磁发电机电流时域和频域图。由图10a可知,在额定工况下不同控制策略对发电机进行控制时发电机电流幅值未改变,两种控制策略下产生电流在同一时刻存在相位差是由于SMC控制下发电机比PI控制下更快达到稳定状态引起。由图10b可知,在PI控制下发电机电流中不仅出现了电流奇次谐波[5fi、7fi、11fi]和13fi,还出现发电机电流基频与齿轮啮合频率的组合频率[fi+fm1]、[fm2+fi]和[fm3+fi];在SMC控制下,虽然发电机电流频率中也出现了电流奇次谐波,但电流频率中并未出现明显齿轮啮合频率与电流基频的组合频率,由此可见SMC控制对抑制齿轮啮频与电流基频的组合频率具有明显效果。
根据国家电网标准[20],发电机并网时电流谐波畸变率≤5%。在SMC控制下发电机达到稳定状态时电流谐波畸变率为3.04%,在PI控制下发电机达到稳定状态时的电流谐波畸变率为4.37%,由此可见,两种控制策略下电流质量均达到国家标准。但在SMC控制下电流质量更高,SMC控制下电流谐波比在PI控制下的电流谐波减少30.43%。
4 结 论
本文根据某公司最新设计8 MW风电机组实际参数建立大型风电机组多自由度传动链机电控耦合模型。基于该模型设计机侧整流器变系数滑模控制器,研究风电机组传动链在传统PI控制器和SMC控制器下主要部件振动响应。结果表明,在不同风速下变系数SMC控制器比PI控制器具有更好的速度追踪性能,能有效抑制传动链转速波动,使系统更快达到稳态;在SMC控制下风电传动链行星级各部件横向振动显著减小,风电机组运行更加平稳;SMC控制能有效抑制发电机电磁转矩和电流中机械谐波成分,减小发电机电流谐波畸变率,从而提高发电质量。
综上可知,风电机组主动控制在减小机械传动链振动方面具有良好表现,通过改进风电机组传统控制策略来减小传动链振动切实有效,可达到风电机组振动控制和减振降噪目的,并提高发电机电流质量。
[参考文献]
[1] ZHANG S J, WEI J, CHEN X, et al. China in global wind power development: role, status and impact [J]. Renewable amp; sustainable energy reviews, 2020, 127: 109881.
[2] BP. BP statistical review of world energy[R]. 20200770, 2020.
[3] 孙黎, 褚景春, 袁凌, 等. 基于模态和传动误差的大型海上风力机传动链交互耦合式动力学分析[J]. 太阳能学报, 2021, 42(4): 366-373.
SUN L, ZHU J C, YUAN L, et al. Interaction coupling dynamic" analysis" of" drive-train" of" large" offshore" wind turbine based on modal and transmission error[J]. Acta energiae solaris sinica, 2021, 42(4): 366-373.
[4] 谭建军, 朱才朝, 宋朝省, 等. 风电机组传动链刚柔耦合动态特性分析[J]. 太阳能学报, 2020, 41(7): 341-351.
TAN J J, ZHU C C, SONG C S, et al. Dynamic characteristics analysis of wind turbine drivetrain with rigid-flexible coupling[J]. Acta energiae solaris sinica, 2020, 41(7): 341-351.
[5] ZHANG A Q, WEI J, QIN D T, et al. Coupled dynamic characteristics of wind turbine gearbox driven by ring gear considering" "gravity[J]." "Journal" "of" "dynamic" "systems, measurement and control, 2018, 140(9): 1-15.
[6] 张琛, 李征, 蔡旭, 等. 双馈风电机组轴系扭振的稳定与控制[J]. 电工技术学报, 2015, 30(10): 307-316.
ZHANG C, LI Z, CAI X, et al. Stability and control of shaft" "torsional" "oscillation" "for" doubly-fed" "wind" "power generator[J]." "Transactions" "of" "China" "Electrotechnical Society, 2015, 30(10): 307-316.
[7] 解大, 冯俊淇, 娄宇成, 等. 基于三质量块模型的双馈风力机小信号建模和模态分析[J]. 中国电机工程学报, 2013, 33(S1): 21-29.
XIE D, FENG J Q, LOU Y C, et al. Small-signal modelling and modal analysis of DFIG-based wind turbine based on three-mass shaft model[J]. Proceedings of the CSEE, 2013, 33(S1): 21-29.
[8] DAVID F M, GARCIA J L D, PRADA M D. Modeling and control" "of" "type-2" "wind" "turbines" "for" "sub-synchronous resonance damping[J]. Energy conversion amp; management, 2015, 97: 315-322.
[9] MOODI H, BUSTAN D. Wind turbine control using T-S systems" with" nonlinear" consequent" parts[J]." Energy, 2019, 172: 922-931.
[10] GIRSANG I P, DHUPIA J S, MULJADI E, et al. Modeling and control to mitigate resonant load in variable-speed" "wind" "turbine" "drivetrain[J]." "IEEE" "journal" "of emerging and selected topics in power electronics, 2013, 1(4): 277-286.
[11] SALEM A, SIADA A A, ISLAM S. Application of order analysis to diagnose fatigue within wind turbine gearbox[J]. Technology and economics of smart grids and sustainable energy, 2017, 2(3): 1-5.
[12] 庞辉庆, 邓英, 刘茜, 等. 基于卡尔曼滤波的风电机组传动链扭振控制[J]. 太阳能学报, 2020, 41(11): 293-299.
PANG H Q, DENG Y, LIU Q, et al. Torsional vibration control of wind turbine drive train based on Kalman filter [J]. Acta energiae solaris sinica, 2020, 41(11): 293-299.
[13] 秦大同, 鲁迪, 陈锐博, 等. 随机风速下风电传动系统机电耦合动态特性分析[J]. 太阳能学报, 2020, 41(11): 326-333.
QIN D T, LU D, CHEN R B, et al. Electromechanical coupling dynamic characteristic analysis of wind turbine transmission system under random wind speed[J]. Acta energiae solaris sinica, 2020, 41(11): 326-333.
[14] GHOSH S, SENROY N. Electromechanical dynamics of controlled variable-speed wind turbines[J]. IEEE systems journal, 2015, 9: 639-646.
[15] YAN J H, FENG Y, DONG J N. Study on dynamic characteristic of wind turbine emulator based on PMSM [J]. Renewable energy, 2016, 97: 731-736.
[16] 黄守道. 直驱永磁风力发电机设计及并网控制[M]. 北京: 电子工业出版社, 2014.
HUANG S D. Design and grid-connected control of direct-driven" "permanent" "magnet" "wind" "turbine[M]." "Beijing: Publishing House of Rlectronics Industry, 2014.
[17] 袁雷. 现代永磁同步电机控制原理及Matlab仿真[M]. 北京: 北京航空航天大学出版社, 2016.
YUAN L. Control principle and matlab simulation of PMSM [M]. Beijing: Beihang University Press, 2016.
[18] KOMURCUGIL H, BIRICIK S, BAYHAN S, et al. Sliding mode control: overview of its applications in power converters[J]." "IEEE" "industrial" "electronics" "magazine, 2021, 15(1): 40-49.
[19] HOU L M, WANG L Y, WANG H Z. SMC for systems with matched and mismatched uncertainties and disturbances based on NDOB[J]. Acta automatica sinica, 2017, 43(7): 1257-1264.
[20] GB/T 14549—1993, 电能质量公用电网谐波[S].
GB/T 14549—1993, Power quality harmonics in public power grid[S].
RESEARCH ON VIBRATION CONTROL OF WIND TURBINES BASED ON
VARIABLE COEFFICIENT SLIDING MODE CONTROLLER
Zhang Shijie1,Wei Jing1,2,Tang Baoping1,2,Ji Kefeng3
(1. College of Mechanical and Vehicle Engineering, Chongqing University, Chongqing 400044, China;
2. State Key Laboratory of Mechanical Transmissions, Chongqing University, Chongqing 400044, China;
3. Gears and Transmission Sub-company, Taiyuan Heavy Industry Co., Ltd., Taiyuan 030024, China)
Abstract:Based on the actual parameters of the drivetrain of a new 8 MW semi-direct-drive wind turbine, the electromechanical model of the drivetrain is established, by changing the control strategy, the anti-interference ability of the wind turbine drivetrain is enhanced and the transverse vibration of the components of the drivetrain is reduced. The results show that when the wind turbine is excited by change, under the variable coefficient sliding mode controller, the speed tracking effect of the generator rotor is better, the transverse vibration displacement of the mechanical parts is reduced significantly, and the mechanical frequency of the generator current and the electromagnetic torque is effectively suppressed.
Keywords:wind turbines; dynamics; drivetrain; sliding mode control; electromechanical coupling