正压防爆机器人在军工生产中的应用
2023-04-10张东森
张东森
现阶段,智能化技术得以深入发展,战争模式、武器装备生产朝着无人化和智能化方向进步。为切实满足军工企业核心制造能力提高的要求,需深入分析在特殊领域,例如废料处理、火工品搬运、全弹装配和弹药装填过程中如何应用信息化和智能化技术,降低工伤事故以及保障产品质量。基于此背景,需就现有弹药装填技术予以革新,通过设计防爆机器人,解决大负载防爆机器人空缺问题,使得军工生产和管理更为优化。
1 军工生产中正压防爆机器人的设计
1.1 背景
由于弹药自动装填无人技术仍处于理论探索时期,尚未设计出科学完备的弹药装填机器人,缺乏防爆机器人介入。研究在军工行业中使用防爆机器人这一理论,将填补大负载防爆机器人的国内空缺,缩短喷涂型防爆机器人技术革新的时间。通过调查发现,多家机器人制造公司正研究一种基于正压防爆系统的机器人,其能够具备操作方便以及结构形式简单的优势,在设计防爆结构的过程中,基于机器人本体模型,设置骨架、密封圈、过线孔、正压腔体,并运用密封处理办法,保证活动部位具备密封特性,使得本体结构的防护等级满足IP65标准。为切实提升正压防爆效果,设计多点泄压和独立舱体结构,保证在换气环节降低残留以及消除死角[1]。
1.2 机器人设计
1.2.1 防爆机器人设计需求
具体设计需求见表1、2、3。基本需求依据见表4。基本组成见表5。
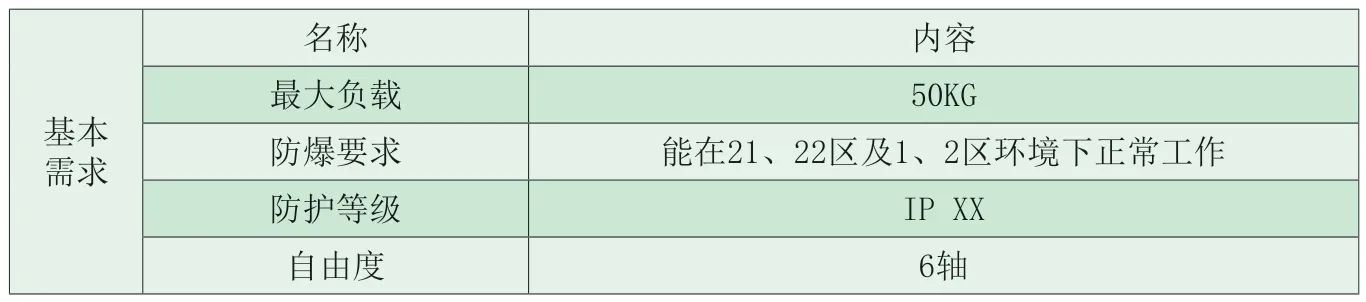
表1 基本需求
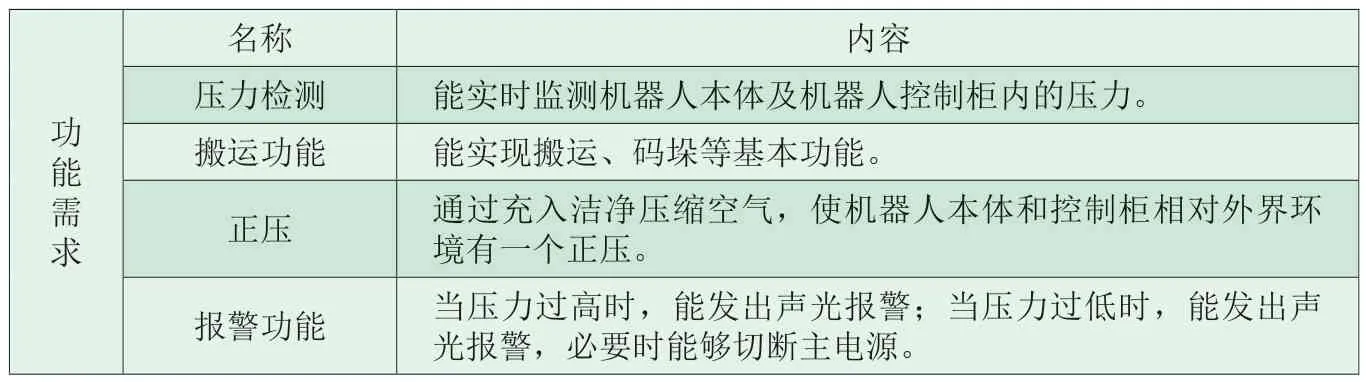
表2 功能需求

表3 性能需求

表4 基本需求依据
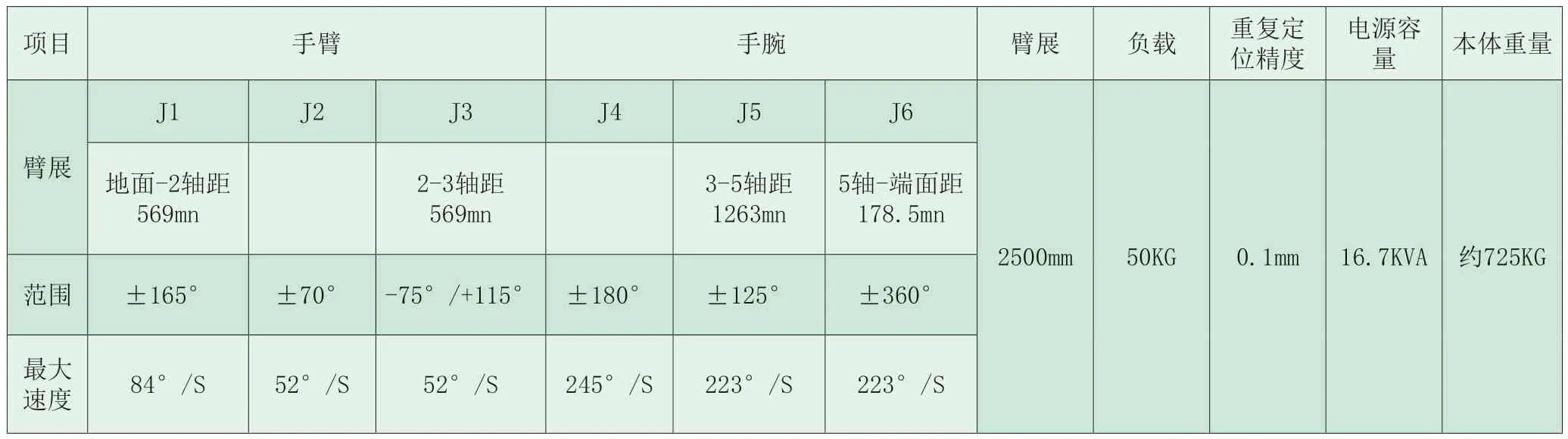
表5 机器人基本参数表
1.2.2 工作单元设计
设计的防爆机器人由6 个自由度的机械臂组成,对应6 个伺服电机,通过电机驱动实现旋转和摆动各轴,相关人员在示教器上输入控制要求,使得机器人展示出相应的功能和动作[2]。设有正压外壳置于机器人本体,增设排气口和进气口。正压操作需置于上电工作前,保证机器人外壳内部,处于正压状态,达到防爆效果。控制柜结构为正压防爆型,其中设置元器件、电路和机器人控制器,防爆报警灯、防爆钥匙开关、防爆停止按钮和防爆启动按钮设于控制柜外表面。机器人控制柜提供机器人本体运行的主电源,通过操控开关和按钮,实现报警、断电和上电工作两种状态。示教器与机器人控制柜相连,可达到通过操控示教器,促使机器人产出相应动作的效果[3]。连接气源阀门和管道,设置进排气口,达到正压通风的使用目的。对于正压控制柜的设计来讲,在普通柜体的基础上,增加4 个隔爆箱。其中之一放置接触器和主电源开关,另外3 个放置控制器,发挥正压防爆的作用。操控人员通过控制外表面屏幕和薄膜按钮,交互控制正压防爆控制器。将报警灯与正压防爆控制器连接,增加高低压报警功能,连接进气阀和正压柜,显示换气控制信号。针对不同腔体压力以及状态可控制机器人本体是否开展上电操作。
2 正压防爆机器人在军工生产中的应用
机器人由内部传感器、传感单元驱动装置和机械臂组成本体,能够完成各种作业,其作为机械执行机构。包含手腕、小臂、连接法兰、传动装置、伺服电机、减速器、肘关节、肩关节、大臂、腰部、踝关节和基座,每个关节均采用一个交流伺服马达完成驱动。由于所设计的机器人属于关节型机械连杆,由关节连接形成集合体,手臂形态与人体较为相似,符合空间开链式结构。一端能够自由活动,另一端位于基座上,并用固定装置,达到固定效果。连杆结构与关节共同组成机器人本体,其包含多个部分和多种关节结构。其中,基座起到支撑的作用,作为机器人的基础部分,为其他各组织提供基本支撑力;手臂由大臂和小臂组成,与手腕和机身连接,作为运动主轴,能够改变手腕的运行方向,并改变末端执行器空间位置;次轴部分为手臂和末端执行器连接的手腕,其能够用于空间姿态的改变操作当中;连接法兰是手腕机械接口的主要连接装置,起到拼装多类机械操装置的作用。在整个机械臂运动系统当中,包含6 个交流伺服电机,能驱动六轴运动。手腕和小臂内的伺服电机能够达到绕轴回转的效果;髋关节、肘关节和肩关节的伺服电机可达到摆动机械臂和控制其运动的效果;腰关节的伺服电机能够达到绕基座轴向旋转的运动目的。操作人员使用正压防爆型机器人作用于军工生产环节当中,需提前对机械臂予以编程。由此控制伺服电机启停,使得机械臂能够在空间内达到6 自由度运动效果[4]。
2.1 控制箱
防爆正压控制箱是正压型防爆机器人的正压控制部分,包含防爆声光报警器、电磁阀、信号反馈继电器、压力传感器、控制线路板和气源压力调节阀等。气源计算公式为:
将数值代入公式得到:
其中,Q1=(3~5)m3/h,使用的进气管内径为8 mm。Δp=459Pa,防护服处的气体压力气体压力为P1≥1459Pa,因气源存在压力损失,其在进入减压阀和手动阀会损失一部分压力。通过读取《气动元、辅件的压力损失表》,可知压力损失为P2=0.025MPa,求出P ≥P1+P2≈0.04MPa,得到接入控制箱处的气源压力为0.04MPa[7]。由于存在漏气问题,应当保证实际气源压力0.1MPa。正压防爆装置的气路控制图见图1,正压控制系统的工作流程见图2。
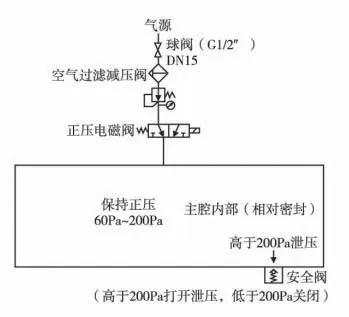
图1 正压防爆装置的气路控制图

图2 正压控制系统运行流程图
本文所设计的正压防爆机器人的正压系统,由压力传感器、正压控制器、防爆电磁阀和正压枪组成。气源来自压缩洁净空气,将气体输入到正压枪和正压柜中,提供防爆所需必要气源。途经管道进入危险区域的整个过程,需经过溢流调节阀、手动球阀和过滤减压阀,联动控制进气电磁阀、泄压阀、流量阀和精密减压阀,保证正压外壳压力得到精准管控,使得整体压力保持在50~500MPa范围内。所设计的正压柜在正压环节可分为,换气、充气和运行三个阶段。对于换气阶段而言,其属于正压工作的准备环节,通过换气操作,将柜内的气体和可燃性粉尘排出。操作人员将进气电磁阀打开,保证气体持续通入换气系统当中,查看换气倒计时时间,精准计算正压柜内换气量体积,需保证总气体量超过柜内体积5 倍才可满足最小换气量要求。对于充气阶段而言,换气结束后系统处于充气状态下。打开进气电磁阀,增大柜内压力,为运行阶段做准备[8]。对于运行阶段而言,需关闭进气电磁阀,以流量阀小流量控制气体进入柜中体积,保证柜内压力值处于正常的范畴内[5]。通过检测,若发现压力值过高,应当打开报警器,采取泄压操作。机器人将自动打开限压阀,实现压力降低操作目标。若压力值过低,机器人将自动打开进气电磁阀和报警器,使得压力及时回升。
2.2 压力监测装置
在军工生产过程中,压力作为基本参数,其直接影响正压防爆机器人的工作状态以及安全性能,由此为保证正常运行应当检测保护性气体压力,从而保障操作人员安全以及设备稳定运行。增设压力检测装置,将其置于密封腔内,测量密封腔内压力,将其与外界压力进行比较,保证测量压力高于外部环境压力。使用压差式传感器,提高低压控制精度。传感器主要检测的对象是机器人和外界环境压力所形成的腔内压力差,此种相对过压为传感器的重点控制要素。控制线路板以及压力器共同组成压力检测装置,粉尘控制箱作为压力传感器的放置位置,通过与周围环境相连接,高压端与机器人密封联通。实际工作中,当保护性气体不断充入至密封腔内,此环境中压力值会加大,形成过压压力,传感器收集到过压信号,将其转变为模拟信号,传送至控制线路板[6]。
2.3 正压腔
将正压防爆机器人应用于军工生产当中,需要维持机器人处于正常运行状态,保证密封腔的过压维持在安全的范围内。
防爆机器人有自主巡逻、一键到达以及手动控制等多种工作模式,目前在仓储、危险品生产、危险工作场所场景广泛应用,尤其军工生产中其借助智能识别算法和多种传感器,在设定每日计划后,执行巡逻值守任务,准时到达值守点。工作中,通过实时上传巡视周边环境和周边视频数据、环境数据信息,并将数据信息保存到本地,传输至后台系统。如存在异常情况,机器人管理后台和用户的移动终端将接收报警信息,自动识别,提供预处理意见。
3 结束语
综上所述,设计军工生产中的正压防爆机器人,需以实现正压为最终作用控制目标。通过协调各子系统的反馈控制系统,达到管控要求。整个正压系统在工作过程中,将对压力的管控,作为运行的关键控制要素,针对不同压力采取对应的自动报警和故障排除操作,达到及时报警以及停止工作元件运行的效果。为此,需要各专业技术人员积极参与到正压型防爆机器人设计制造和调试的研究工作当中,提升机器人的防爆性能,保证我国军工生产处于高质高效的状态。