基于SCATS控制系统的快速公交信号主动优先控制方法及系统实现
2023-03-30马军
马军
上海平可行智能科技有限公司 上海 200235
1 引言
公交优先指在信号控制交叉口给与公交车辆相对于其他车辆的优先权。出于现实的巨大需求,公交优先控制理论自创立开始,吸引了交通控制领域、公共交通领域等各领域研究者的注意力。公交优先主要包含主动优先和被动优先。被动优先指策略不考虑交叉口是否有公交车辆到达,同时不需要车辆检测/优先申请生成系统;主动优先指为检测到的特定车辆提供优先,包括绿灯延长、红灯早断、相位插入等多种方法[2]。
SCATS(以下统称为SCATS控制系统)是“Sydney Coordinated Adaptive Traffic System”的英文名称缩写,是一种在国际上被普遍采用的商用自适应道路交通信号控制系统。该系统目前在国内应用于上海、广州、杭州、沈阳等多个城市,其在城市日常道路交通管理中扮演着极为重要的角色[3]。SCATS控制系统支持分时段或感应式单点控制及协调控制,应用较为灵活。除此外,其还提供特殊车辆预设路线、公交信号优先等特殊控制功能。
国内基于SCATS控制系统进行快速公交信号优先工程实践中,在确定SCATS控制系统外部干预信号的输入时间窗口时,通常结合车辆的现场运行特征进行反复调试,缺乏科学的调控手段,不但影响工程的实际进展,对于公交信号的主动优先控制也并不理想[4]。为了弥补上述不足之处,本文着重基于SCATS控制系统设计一种公交信号优先控制系统,提出一种在设置公交专用道条件下的快速公交信号主动优先的控制方法,同时以临港新片区中运量公交T2线工程为例进行实例验证。其特征在于结合SCATS控制系统的外部信号干预原理,利用实车运行统计数据精细调控外部信号输入的时机,从而有效干预SCATS控制系统控制策略的执行。
2 基于SCATS控制系统的主动优先控制机理
2.1 控制机理说明
实施公交主动优先策略,通常的做法是在交叉口上游布设检测器以感知车辆的到达,通过预判公交车辆由检测器位置到达交叉口进口停车线行驶时间,结合交叉口当前相位状态在合适的时间点将优先申请信号发送至交叉口信号控制机。交叉口信号控制机在接收到优先申请信号后,会结合交叉口交通实际需求并在信号控制系统的总体控制下执行相应的控制方案。检测器的布设位置如图1所示[1]。
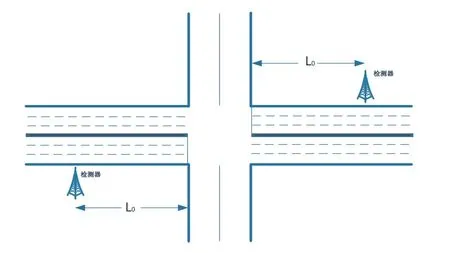
图1 快速公交主动优先检测器布设示意图
检测器用于判定公交车辆的到达。其设置在交叉口进口停车线上游处,与交叉口公交相位绿灯倒计时和最大绿灯延长时间相关。在具体实践过程中,不同厂家的信号控制机或交通信号控制系统在接收优先申请信号及执行方案时均有所不同。本文主要基于SCATS控制系统进行有关主动公交优先控制的研究。
SCATS控制系统分两个层次进行信号控制(定义为战略控制和战术控制),以适应交通流量的需求,特别是控制影响路口协调的周期、绿信比和相位差三个重要参数。战略控制是以区域为基础计算上述三个参数以决定信号网络协调的高层控制,由区域控制计算机完成。战术控制是以路口为基础,在不违反区域控制计算机制定的战略控制参数的条件下来满足路口交通需求的变化,是低一级的控制,由信号控制机完成。中央管理计算机负责控制数据的输入、采集、监测、分析以及系统的管理等工作。
SCATS控制系统通过战略控制和战术控制的结合提供公交信号优先控制功能。战术控制提供外部优先申请触发信号的输入并向战略控制传达,根据战略控制指令具体执行;战略控制在接受战术控制的申请后,依据预设的特殊控制先决条件及当前的信号进行逻辑计算,以此向战术控制下达执行指令及目标控制参数,或下达拒绝指令。
对于战术控制提供外部优先申请触发信号的输入,须额外设计一套设施用于向交叉口信号控制主机发送优先申请信号。而SCATS控制系统路口信号控制机实际仅提供干触点输入通道,即仅支持采用开关量接口方式[2]接收公交优先通行请求。
2.2 信号优先控制系统构成
信号优先控制系统按照上述SCATS控制系统公交优先功能的实现方式进行设计。系统基本构成如图2所示。
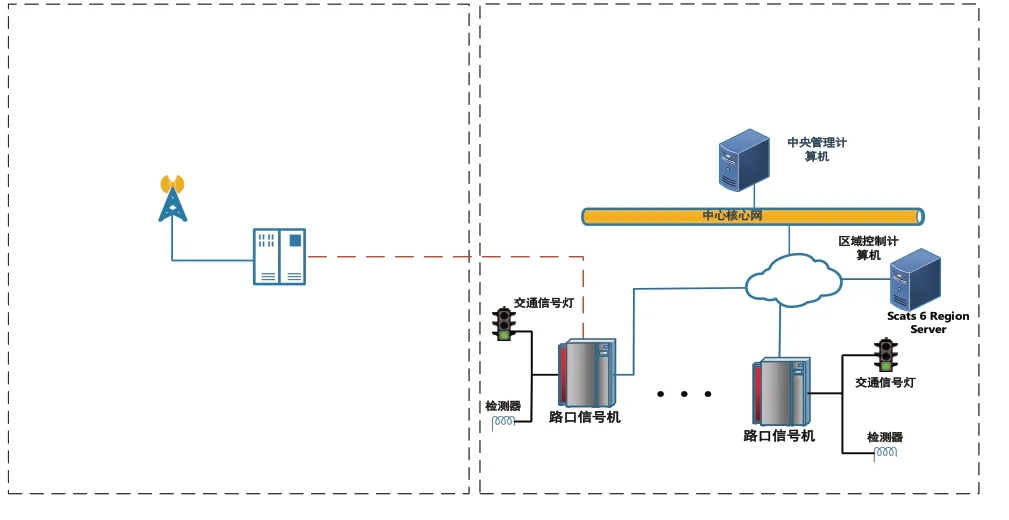
图2 基于SCATS控制系统的快速公交信号主动优先控制系统基本构成示意图
系统以优先控制主机为核心,辅以路侧检测器完成向SCATS控制系统申请优先通行。优先控制主机主要承担向信号控制主机发送优先申请信号的任务,具体实现以下三方面功能:
①接收检测器采集的数据进行车辆运行特征的计算,判断车辆到达交叉口进口停车线的时间;
②实时采集交叉口交通控制方案的数据,判断交叉口当前相位状态及是否处于公交相位倒计时时间区段;
③在特定时刻通过路口信号控制机向SCATS控制系统发出优先申请信号,并接收申请反馈。
3 控制方法
以某一四相位交叉口为例,重点讨论基于SCATS控制系统的快速公交交叉口优先通行控制中绿灯延长和红灯缩短[3]两种响应方式的控制方法。同时本文仅研究交叉口具有单一公交相位的情况,对于多公交相位的交叉口不在本文讨论之列。
3.1 控制模型及关键参数分析
如图3所示,Phase A、Phase B、Phase C及Phase D为交叉口的四个相位及相应相序,其中Phase A为公交相位。
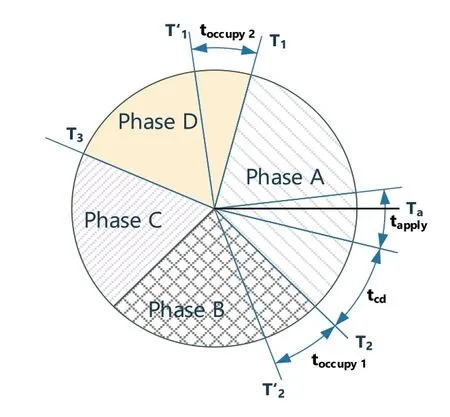
图3 相位相序示意图
图中:
T1— Phase A原绿灯时间开始时刻;
T2— Phase A原红灯时间开始时刻;
T3— Phase D的绿灯时间开始时刻;
Ta— SCATS控制系统接收到优先请求通知的时刻,等同于优先控制主机发出优先请求时刻;
Tcd— Phase A绿灯时间的倒计时时间段;
Tapply—绿灯时间延长控制可响应时段;即SCATS控制系统仅支持Ta处于Tapply时段内并且收到绿灯延长指令时,才能在Phase A实施绿灯时间延长策略,其余时间区段发出绿灯延长指令则无效。其中,Tapply的结束时刻为Tcd的开始时刻,Tapply的开始时刻可记为Tapply(s),其需要事先于SCATS控制系统中设定;
Toccupy1— Phase A启用绿灯延长优先策略时,SCATS控制系统实际给予Phase A的绿灯延长时间,也即相应占用的Phase B的绿灯时间;
Toccupy2— Phase A启用红灯缩短优先策略时,SCATS控制系统实际给与Phase A的红灯缩短时间,也即相应占用的Phase D的绿灯时间;
同时,定义如下参数:
T'1— Phase A启用红灯缩短优先策略后,下一周期Phase A绿灯时间的开始时刻;
T'2— Phase A启用绿灯延长优先策略后,Phase A红灯时间的开始时刻;
CL— 周期时长;
TL— 优先控制主机获知车辆到达上游处检测器的时刻;
ts— 车辆预计到达时间,即从TL时刻起至对象车辆到达交叉口停止线所经历的时间;由优先控制主机根据相应规则计算;
3.2 控制模型参数计算
3.2.1 约束条件
受现有优先控制系统及工程条件的相关限制,将下列约束条件列为研究前提:
①SCATS控制系统在一个信号周期内至多响应1次优先通行请求;在一个信号周期内系统没有其它特殊控制策略影响公交优先控制;
②优先控制主机无法实时精确获知交叉口信号状态的读秒时刻,但能通过采集信号灯的灯色变化判断当前时刻所处的相位状态及是否处于当前相位绿灯的倒计时区段;
③Toccupy1、Toccupy1因分别受到Phase B、Phase D饱和度(于绿灯时间被占用后)及必要绿灯时间(如倒计时时间)等的限制而存在一个最大值,可分别记为Toccupy1(M)、Toccupy2(M)。其根据交叉口实际流量情况及交通管控需求事先约定。
3.2.2 控制方法核心要素及关键参数求解
首先定义优先控制主机和路口信号控制机间至少有2路开关量通路连接。优先控制主机通过该2路通道单向通知路口信号控制机:开关量1代表绿灯延长;开关量2代表红灯缩短。
预设SCATS控制系统的Tapply(s),可令Tapply=toccupy1(M),则有
由优先控制主机确定Ta,则有
由优先控制主机进行判断并发出优先请求:
SCATS控制系统同步于Ta时刻收到优先控制主机发出的开关量后,进行如下判断及回复:
当收到开关量1,且Ta处于Tapply区段,即时,Phase A启用绿灯延长优先策略,此时有:,由公式(1)和公式(2),得到:
当收到开关量1,而Ta不在Tapply区段时,优先请求失败;
当次车辆ts的计算,由于受到车辆工况、驾驶行为、道路条件、L0位置等多个因素的影响,较难精准计算。国内大多设定车辆以近似匀速运行的条件进行L0、ts的相关研究。本文给出ts的基于车辆运行统计数据的一种迭代确定的工程方法,可应用于优先控制主机主程序的自主运算。
首先可设计检测器采用RFID[4]方式检测识别车辆。通过车载电子标签及安装于路侧的阅读器实现数据通信,能够采集车辆当前身份、运行速度等重要数据,其中运行速度对于求解ts至关重要。
在图1基础上再增加一组检测器2,如图4所示,检测器2位于停车线处,优先控制主机用于标识车辆到达停车线的时刻T'L。
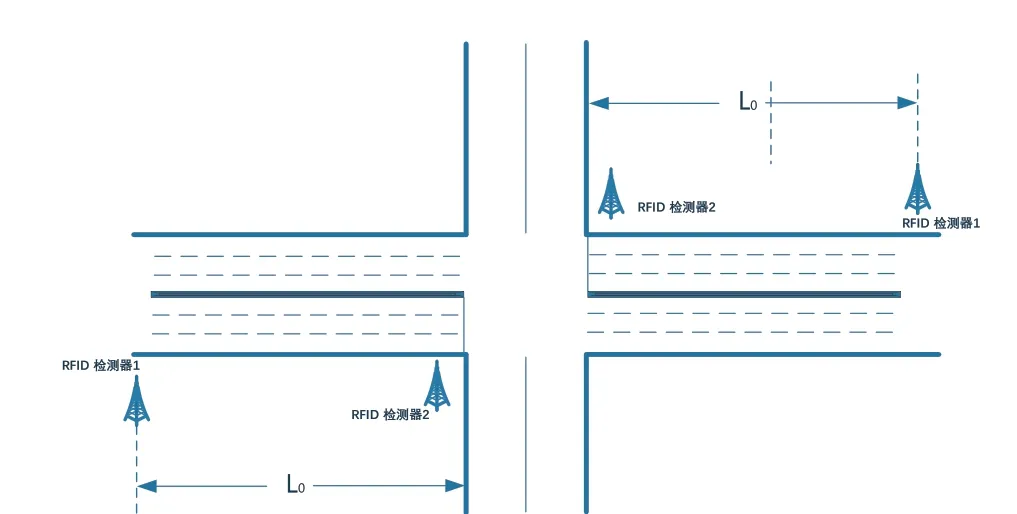
图4 用于标识到达交叉口时刻的快速公交优先检测器布设示意图
其次确定L0,由于公交车辆行驶的不确定性,在工程条件允许的情况下,L0需要根据实际情况确定,可利用优先控制主机算法控制延长优先申请呼叫时刻,从而综合考虑L0的取值。这里假设车辆由检测器位置行驶至下游交叉口停车线的平均速度为(可综合调查实际项目中运营车辆运行情况或目标速度确定其取值)。于是可令[5]。
定义车辆经过L0时的瞬时速度为(由RFID阅读器采集得到,单位精确到0.1米/秒),实际存在j个不同的v值,以步进制表,设计表 1如下所示。

表1 v-ts映射统计表
tij(i、j取正整数)表示车辆以速度vj第i次通过RFID检测器1后,到达停车线的时间,有
填入表 1;
于是,当时,可近似得到:
由优先控制主机维护表 1,持续记录tij并迭代ts。设定当时公式(6)演进为:
3.2.3 交叉口进口道有公交站台的处理
实际的快速公交线路中,交叉口进口道附近设置有公交站台的情况普遍存在。由于车辆在站台停靠时间的不确定性,L0及ts的取值将受到较大影响,上述控制方法需要进行优化。
在图1基础上再增加1组RFID检测器3,布设如图5所示。
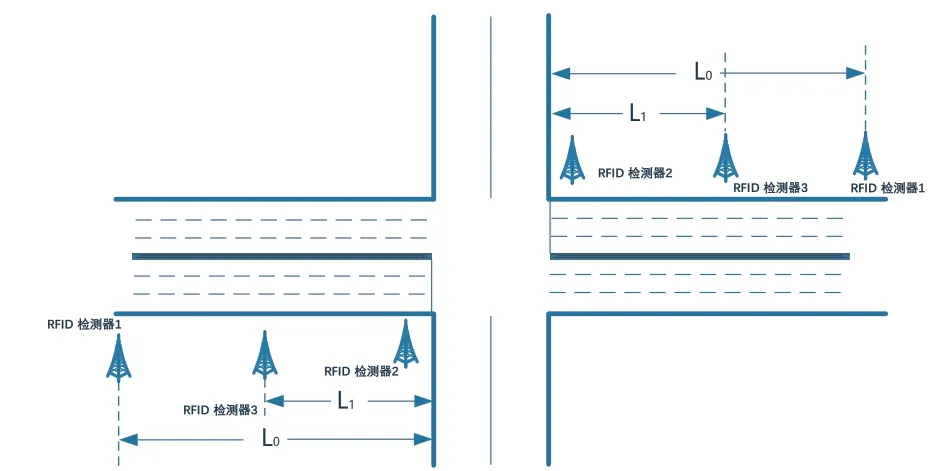
图5 进口道设有公交站台的快速公交优先检测器布设示意图
RFID检测器3设置在站台头部。L1依赖于站台建设的位置和几何尺寸。RFID检测器3可用于判定公交车辆的到达和优先申请呼叫时刻的参照,利用优先控制主机算法控制延长优先申请呼叫时刻,从而模拟无站台情况下,车辆到达L0的近似场景。
L0的取值沿用上述控制方法不变。通过RFID检测器1可获取车辆身份信息,能够用于判定车辆是否为跨站运营。如果是,则控制方法不变。如果不是,则有如下方法:
重新定义TL— 优先控制主机获知车辆到达RFID检测器3的时刻;T'1则不发生变化,于是,公式(1)、(2)、(3)、(4)均成立。
设ti(i为整数)表示车辆第i次通过RFID检测器3且停站后,到达停车线所经过的时间,设计表 2如下所示。

表2 ti统计表
有
填入表 2于是,可近似得到:
由优先控制主机维护表2,持续记录ti并迭代ts。设定当时,公式(9)演进为:
4 控制方法的系统实现
参照图2及上述控制方法,设计如图6优先控制系统:

图6 优先控制系统设计示意图
优先控制主机与3组RFID检测器以千兆以太网组网,后台配套设计1套公交信号优先管理系统,用于提供信号状态展示,数据统计分析等辅助功能。
梳理控制方法的主要业务流程如下:
第一步,车辆到达RFID检测器1位置,车载标签与路侧阅读器进行数据交互,阅读器采集车辆身份、速度等数据,确认车辆到达;
第二步,阅读器通过计算机网络将采集数据发送至优先控制主机,触发优先控制主机主程序;主程序首先根据当前车辆身份判定车辆是否停站及车辆在交叉口的通行相位并记录;
第三步,优先控制主机主程序依据是否停站选择开始公交信号优先策略计算及确定向路口信号控制机发起优先申请呼叫的时刻(以车辆到达RFID检测器1位置或车辆到达RFID检测器3作为参照),依据该时刻进入主程序后续控制流程;
第四步,优先控制主机主程序以输出开关量信号方式触发路口信号控制机(发起优先申请);
第五步,路口信号控制机接收到开关量信号后,按照“2.1控制机理说明”章节描述的基于SCATS控制系统战略控制和战术控制的公交信号优先功能机理完成整个业务流程。
实现上述控制方法的核心业务流程如图7所示。
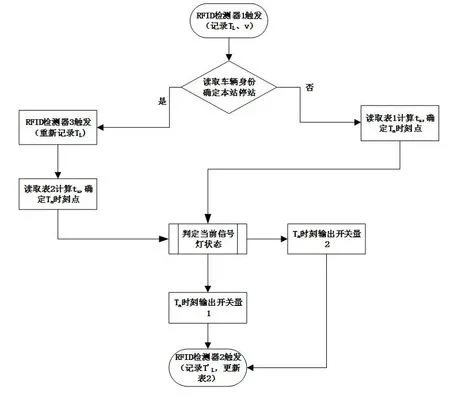
图7 控制方法实现的核心业务流程
5 案例分析
上海临港新片区中运量公交T2线是设置公交专用道的快速公交线路,列车采用胶轮低地板数字轨道导向电车(DRT)。工程线路总长度为8.7km,途经16个信号控制交叉口,均采用SCATS控制系统,工程对其中13个交叉口实施了主动优先控制策略。本文利用列车运行调度控制系统提供的列车定位数据计算列车全线的旅行时间,对比实施主动优先控制策略前后的运行情况,验证基于SCATS控制系统的快速公交信号主动优先控制方法及系统的实现效果。
分别选取2022年10月16日~2022年10月30日(实施主动优先控制策略前),2022年12月30日~2023年1月13日两个时间片段(实施主动优先控制策略后)的早高峰(7:00-9:00),晚高峰(17:00-19:00),平峰(15:00:00-17:00)及低峰(22:00-24:00)时段,分别对列车的平均旅行时间进行分析计算,实施主动优先控制策略前后的对比效果如表3所示。
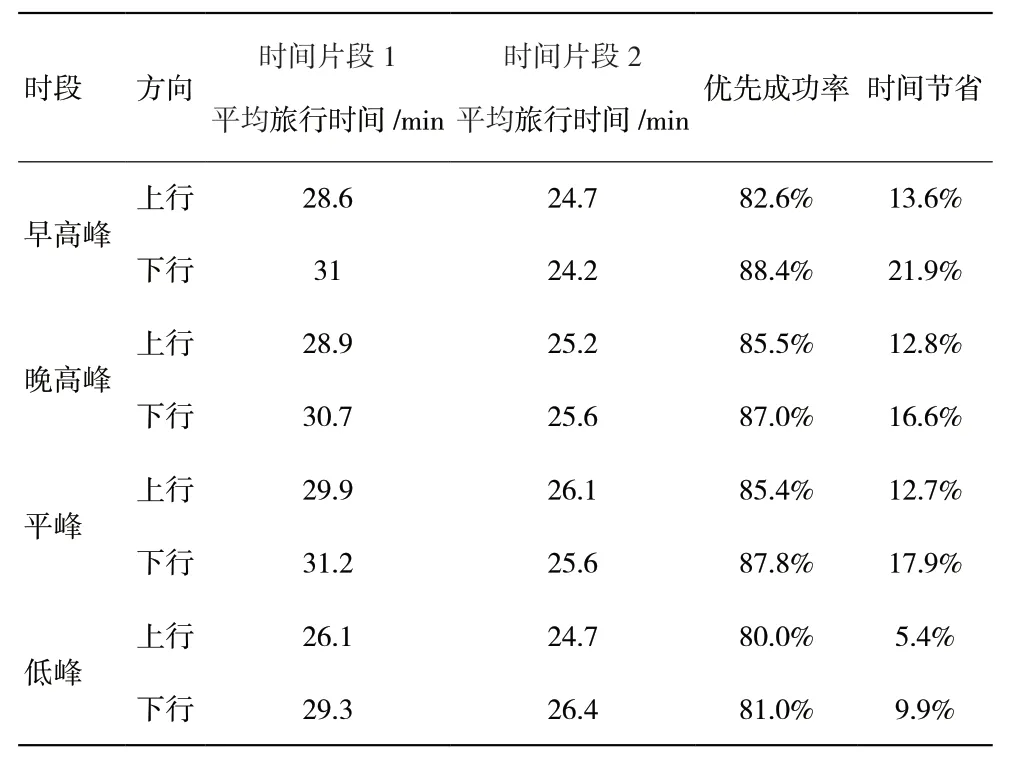
表3 实施主动优先控制策略前后效果对比分析
通过表3可以看出,在采用了主动优先控制方法,实施了优先控制策略后,能有效降低列车的平均旅行时间。其中,早晚高峰时段上行线路平均节省约13.6%和12.8%,下行线路平均节省约21.9%和16.6%;平峰时段上行线路平均节省约12.7%,下行线路平均节省约17.9%;低峰时段上行线路平均节省约5.4%,下行线路平均节省约9.9%。
6 结论
本文结合SCATS控制系统进行公交信号优先控制的工作机理,针对国内在利用SCATS控制系统进行快速公交信号优先工程实践中偏重于经验调试的现状,提出一种公交信号优先控制方法,并在该方法基础上设计了一套控制系统。系统弥补了在检测到目标车辆到来后无法科学确定外部信号干预SCATS控制系统最佳时间窗口的不足,尤其对进口道附近设置有公交站台的情况做了相应优化。系统依托上海临港新片区中运量公交T2线工程进行了实践,并利用列车定位数据进行分析计算,结果表明该系统完全适用于公交专用道场景下公交信号优先控制的工程实施,对提升公交专用道车辆运行速度效果显著。
