无人机大场景模型在铁路地形图测绘中的应用
2023-03-27赵一方
赵一方
(中铁第一勘察设计院集团有限公司,西安 710043)
无人机航空摄影测量具有机动灵活、影像清晰和成本低廉等优势,可以便捷地获取地物地貌信息,弥补了既有手段效率低、成本高、周期长的短板,已成为传统摄影测量技术的有效补充[1-3]。但无人机摄影测量使用的立体模型仍是单个像对,观测范围有限,需要频繁切换像对来进行大范围场景浏览,严重影响生产效率[4]。
为充分发挥无人机航测技术优势,进一步提高铁路无人机航测制图生产效率,基于李德仁等[4-5]提出的航空影像大场景立体模型理论,本院自主研发了基于无人机影像大场景立体模型的数字化测图软件[6-8]。无人机大场景能够大范围地再现地形地物三维信息,弥补了单像对立体模型观测范围受限的缺点,在大场景模型上进行测图能够极大地提高无人机航测制图效率。
1 大场景立体模型
1.1 基本原理
大场景立体模型是由数字微分纠正镶嵌后的大范围无缝正射影像(左片)与引入左右视差后生成的立体辅助影像(右片)构成的,可以看作是一个大范围的单像对立体模型,其核心技术包括数字微分纠正镶嵌与人为视差引入。数字微分纠正镶嵌的目的是把大量离散的航摄像片制作成为大范围无缝正射影像,但由于消除了地形投影差,大场景立体模型的地形理论上是一个平面,没有起伏,仅地物保留了立体效果。因此需要人为在大场景右片上引入左右视差,来模拟消除了的地形投影差,达到恢复地形起伏的目的。
1.2 制作流程
无人机影像大场景立体模型的制作流程主要包括影像匀光匀色、DEM 生成、拼接线编辑和大场景立体模型生成4 个步骤,如图1 所示。
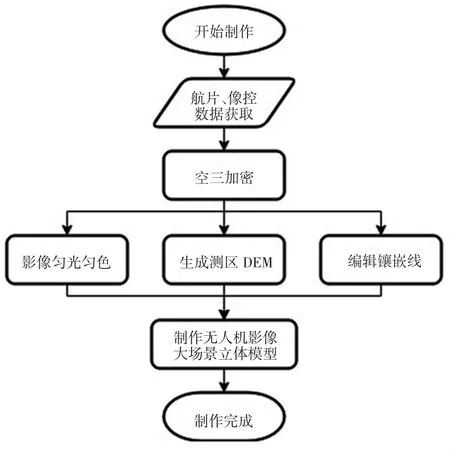
图1 无人机影像大场景立体模型制作流程图
影像匀光匀色是指将输入影像调整成为亮度适中、反差均匀、色彩一致的影像。由于航空摄影过程中时相、环境、姿态和对象等客观因素的差异,不同测段、不同航线之间的影像容易出现过亮过暗、色彩不一致、噪声过大和反差不均匀等现象。使用这样的影像进行数字镶嵌会导致大场景立体模型接边痕迹明显,视觉效果差,给后续工作如影像判读、数字化测图等带来不便[9]。为了保证无人机影像大场景立体模型的色彩一致性,对于色彩不均衡、反差不均匀的原始无人机影像,可以选择进行匀光匀色处理。
测区DEM 生成首先依靠严密的空三加密成果匹配和解算出海量加密点,其次通过点云分类技术筛选出位于地面的加密点,最后对地面点进行重采样生成测区DEM。由于点云自动分类出的地面点含有错点,测区DEM 不可避免地含有误差,但实际上对大场景立体模型量测精度影响较小[8]。DEM 的分辨率宜为无人机大场景模型的50 倍,如制作0.1 m 分辨率的大场景模型,DEM 格网间距为5 m 较为合适[7]。
由于正射影像无法消除地物投影差,如果在投影差大的地方(如高层建筑)进行影像镶嵌,那地物的一部分就会被裁切掉。通过对镶嵌线进行人工编辑,使之尽量避开建筑物,让影像在没有地物的区域进行拼接,可以减少因镶嵌造成的影像重要信息丢失。
2 项目实例
2.1 测区概况
项目位于山地丘陵地区,属构造侵蚀溶蚀中低山地貌,本文研究区域面积约12 km2,测区内相对高差最大约400 m。
2.2 数据获取
2.2.1 航空摄影
采用大白II 无人机搭载飞思IXU-RS1000 数码航摄仪进行测区范围的航摄数据获取,主要相机参数见表1。该系统配备GNSS RTK、减震云台及高精度IMU,实现直接传感器定向或辅助定向测量,可准确获取航摄仪曝光时刻的外方位元素。
表1 飞思IXU-RS1000 数码航摄仪主要参数
2.2.2 像控选刺
像控点布设采用区域网布点,像控点的密度和位置依据CH/T 3003—2021《低空数字航空摄影测量外业规范》要求确定。以正射影像和像控点布设结合图为参考,采用网络RTK 定位技术完成像控点选刺与测量。
2.3 数据处理
2.3.1 空三加密
空三加密作业采用GodWork 软件,依次进行连接点自动提取、自由网平差与渐次删点、像控点量测和光束法区域网平差等工作。通过渐次删点,将内业加密点重投影误差控制在1.5 个像素以内,保证模型连接质量。本项目像控点多为房角等具有一定高度的特征点,因此采用双像立体量测,以减小控制点量测误差。不断优化像控点量测位置,直至区域网平差后像控点平面和高程残差满足相应规范为止[10],最终像控点平面和高程残差分别为0.084、0.070 m。空三加密完成后输出Inpho 和Smart3D 格式成果,分别供DEM 和大场景制作使用。
2.3.2 影像匀光匀色
影像匀光匀色采用GeoDodging 软件的批处理功能,处理模式选择“整体自适应”,处理方法为“滤波法”,对航摄像片进行批量处理。利用原始影像与匀光匀色后的影像分别制作大场景立体模型,对比处理前后大场景视觉效果如图2 所示。
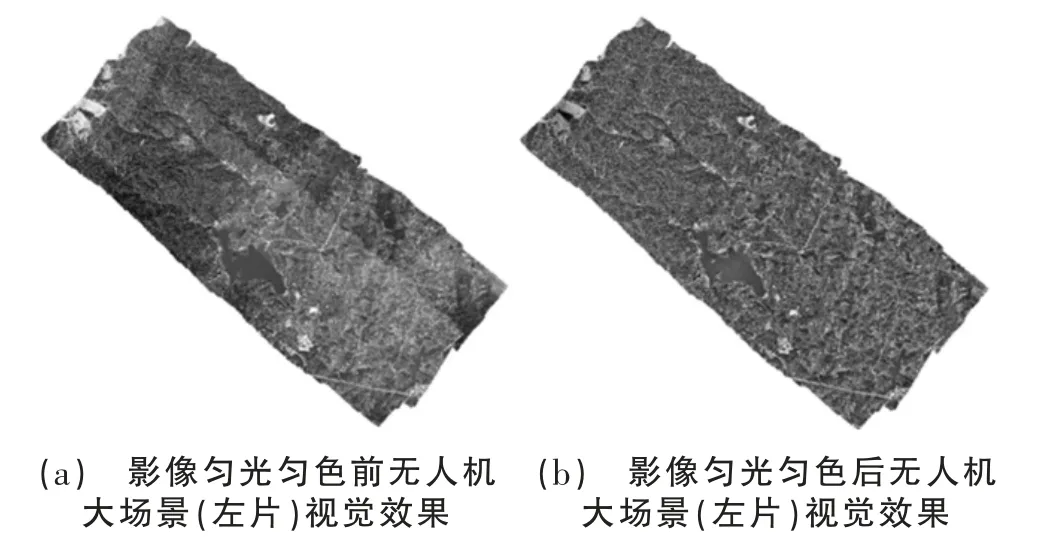
图2 影像匀光匀色前后无人机大场景(左片)视觉效果对比
2.3.3 生成测区DEM
测区DEM 采用Inpho 软件的Match-T DSM 模块制作,主要考虑到该模块具有DEM 平滑功能,使用平滑后的DEM 进行数字微分纠正可以避免正射影像出现扭曲拉花的现象,优化大场景模型的视觉效果。在Match-T DSM 中定义格网大小为10 m,设置平滑选项为中度,运行后生成成果为GRD 格式,需要转换为TIF 格式,供大场景制作使用。
2.3.4 编辑镶嵌线
在ArcGIS 中对镶嵌线进行编辑,以原始镶嵌线制作的大场景左片为底图,移动顶点位置使镶嵌线绕避房屋等拼接有问题的区域,让影像在草木区进行拼接,利用编辑过后的镶嵌线重新制作大场景,恢复图面建筑完整信息。镶嵌线编辑前后无人机大场景模型拼接效果如图3 所示。
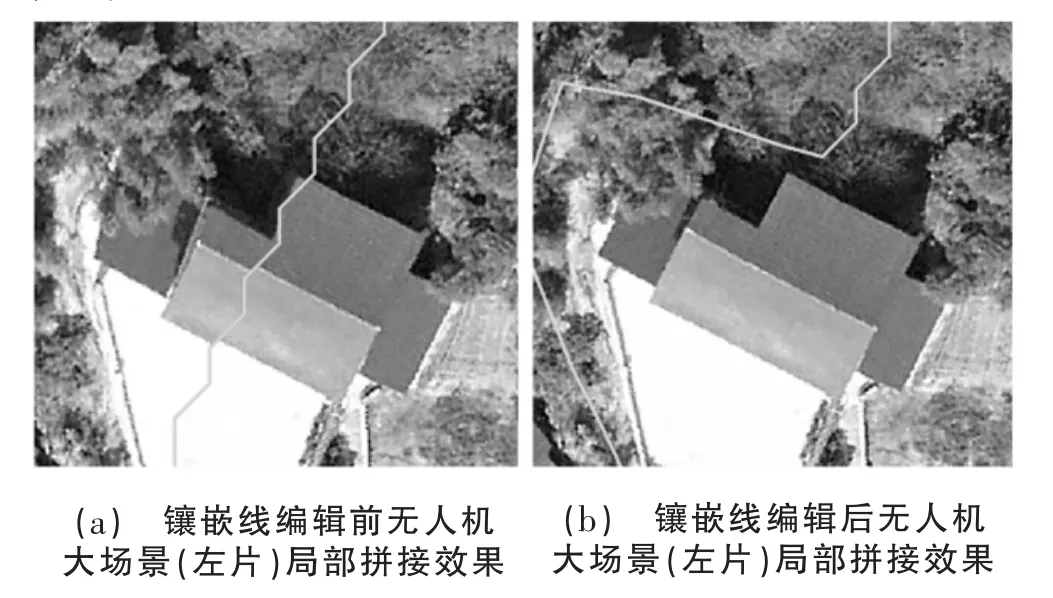
图3 镶嵌线编辑前后无人机大场景(左片)局部拼接效果对比
2.3.5 无人机大场景模型制作
基于前述的Smart3D 格式空三加密成果、匀光匀色影像、测区平滑DEM 和编辑后的镶嵌线,分别在中铁第一勘察设计院(以下简称“我院”)自主研发软件SAT_UAV_APP 和ImageStereo 中进行无人机影像大场景立体模型制作与地貌地物数据采集,生成满足项目技术质量要求的1∶2000 比例尺地形图,如图4、图5 所示。
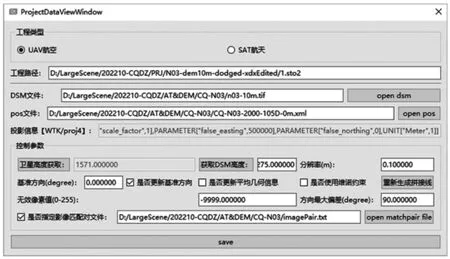
图4 我院自主研发的大场景生成软件SAT_UAV_APP
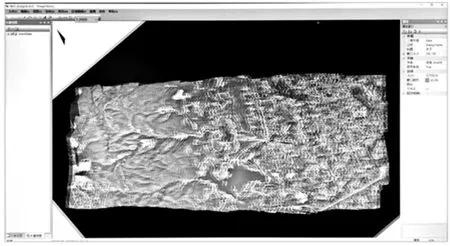
图5 我院自主研发的大场景立体测图软件ImageStereo
2.4 精度分析
2.4.1 统计方法
完成本项目地形图测绘工作后,对地形图成图精度进行验证,以测区内像控点RTK 测量坐标值为参考,统计地形图成果中对应点位相对于参考值的偏差,并计算平面位置中误差和高程中误差,验证基于无人机大场景技术测绘铁路地形图的数学精度,相应计算公式如下
式中:x、y、h 分别为东、北、高坐标值;mxy和mh分别为像控点平面位置中误差和高程中误差;Δ 为像控点各方向上大场景测量值与RTK 测量值之间的偏差;n 为测区像控点总数。
2.4.2 统计结果
在无人机影像大场景立体模型上测量所有像控点坐标,与RTK 测量成果进行比较,验证无人机大场景模型测绘铁路地形图的平面和高程数学精度,结果如图6 所示。
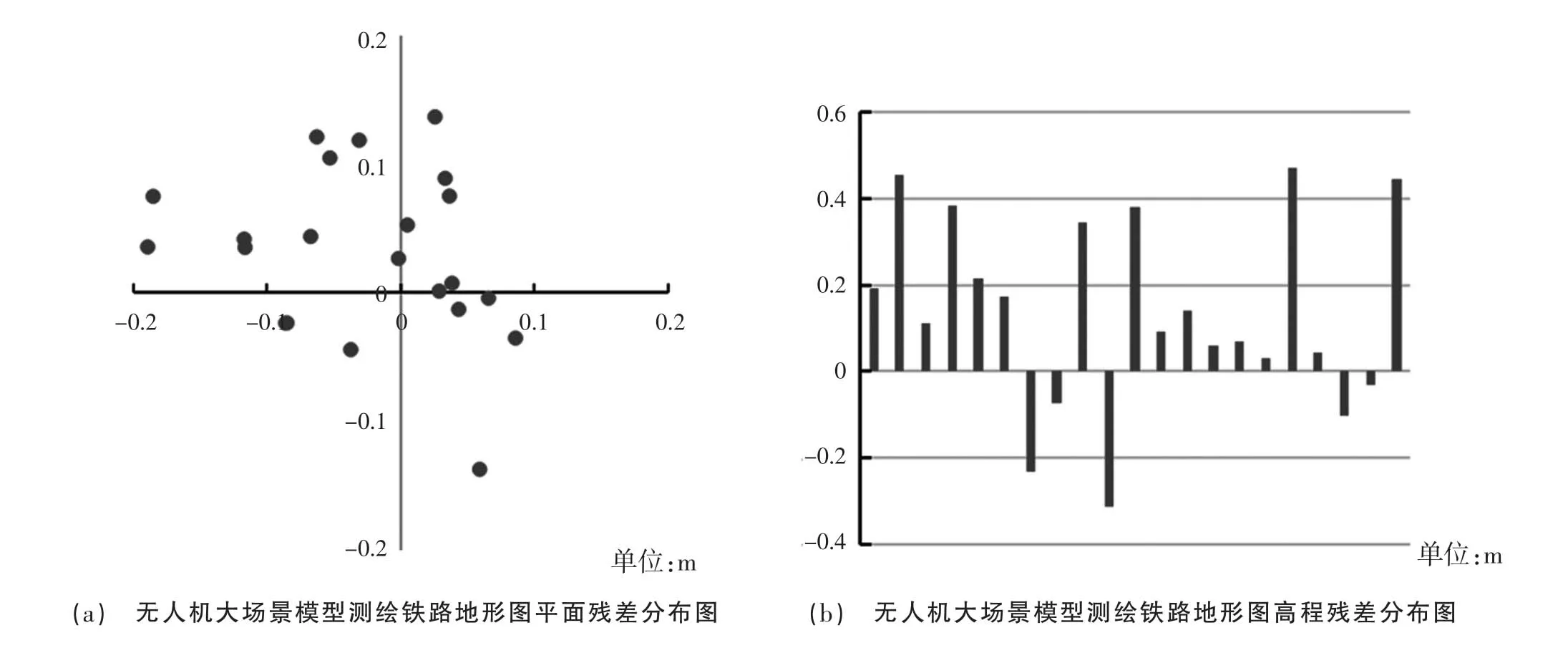
图6 无人机大场景模型测绘铁路地形图平面(左)和高程(右)残差分布图
统计可得,以RTK 测量坐标值为参考,研究区域内像控点的平面位置中误差为0.109 m,高程中误差为0.255 m,满足国家标准中对于二级地形、1∶2000 比例尺地形图地物平面中误差0.6 m、高程中误差0.5 m 的要求[11]。
3 结论
无人机大场景模型利用数字微分纠正镶嵌技术弥补了单个无人机立体像对可视范围窄小的缺点,极大地提高了三维场景的浏览和量测效率。本文借助某山地丘陵铁路地形图测绘项目,对无人机大场景模型的数学精度进行验证,得出其满足二级地形、1∶2000 比例尺地形图国家标准精度要求的结论,为铁路行业大比例尺地形图测绘提供了新的解决方案。
