桥式起重机空行程运行PD结合输入整形控制策略*
2023-03-27董明晓王冰清和大龙刘忠旭
董明晓 王冰清 和大龙 付 航 刘忠旭
1山东建筑大学机电工程学院 济南 250101 2山东龙辉起重机械有限公司 泰安 271224
0 引言
桥式起重机广泛应用于厂房、货站和码头,为了提高桥式起重机的工作效率,目前大量研究者将研究集中在桥式起重机在有载运行时的控制理论和方法。对于桥式起重机控制算法的研究主要分为针对PID (Proportional Integral Derivative)算法的研究、针对输入整形算法的研究以及将PID算法与输入整形算法结合进行研究3类。
PID反馈控制是工业中最广泛使用的控制算法之一,经常被用于提高系统的准确性[1]。这种控制算法有易于实施、成本低等优点,在起重机的控制系统中被广泛使用。Marcello S[2]提出了一种增益反馈控制的方法,并将其应用到门式起重机上以提高起重机在运行时的稳定性;Haniff M等[3]针对双摆式桥式起重机,设 计 了 PA-PID(Piecewise Affine Proportional Integral Derivative)控制系统,并将其用来提高小车位置定位跟踪的精确性;杨立秋等[4]利用基于专家PID控制理论,设计了一种应用于船用起重机PID专家控制器,并通过仿真实验验证了该方法具有较好的跟踪性能和消摆效果;朱发渊等[5]设计了一种双闭环PD控制器,在保证小车机构快速到达指定位置的同时尽量降低货物摆动角度;Azmi N等[6]提出将粒子群优化与PID控制结合的方法,在保证小车位置准确性的同时提高了起重机小车的运行速度。
输入整形算法作为一种开环控制策略,可在不改变原控制系统的情况下,快速消除系统的振动,降低稳定时间。Singer N等[7]、Huey J R等[8]设计了零振动(Zero Vibration,ZV)、零振动微分控制器(Zero Vibration Derivative,ZVD)和极不灵敏控制器(Extra Insensitivity,EI)消除起重机货物的残留摆动。开环控制策略结构简单,易于实现,但对外界扰动十分敏感,鲁棒性较差,故经常与其他算法结合在一起使用。例如:李杰等[9]将LQR (Linear Quadratic Regulator)线性控制器与输入整形算法相结合,并将其应用到桥式堆垛机上,提高桥式堆垛机停车的稳定性。考虑到PID算法和输入整形算法的优点,将二者相结合是有效的。进一步提出将输入整形控制策略与PD反馈控制策略相结合抑制货物摆动[10-12]。
以上的研究都是针对起重机带有货物时的控制策略,对于如何提高桥式起重机空行程运行速度和快速定位问题的研究较少,本文基于桥式起重机在空行程运行时小车机构的线性化模型,将PD结合输入整形策略应用于小车机构空行程运动控制,以提高桥式起重机的工作效率。
1 在空行程运行时小车机构的线性化模型
通常情况下,货物的运输由桥式起重机3个机构的组合使用来实现。桥式起重机结构与工况较为复杂,且各机构间相互耦合,因此,在对桥式起重机动力学研究时,需对桥式起重机的结构进行必要的简化。货物在水平面内的运动依靠桥式起重机小车机构和大车机构的驱动来实现,2大机构的运动方向相互垂直,2个方向上的运动可实现解耦。故本文仅研究小车机构运动方向的水平移动。桥式起重机结构示意图如图1所示。

图1 桥式起重机结构示意图
惯性笛卡儿坐标系(x,y)建立在桥的左端,非惯性极坐标系(l,θ)建立在起升钢丝绳的悬挂点处。根据Lagrange方程,建立桥式起重机-小车机构-货物系统的线性化动力学模型,表示为
式中:m、M分别为小车机构和货物的质量,x、分别为小车机构的位移和加速度,θ为货物离开平衡点的摆动角度,l、分别为起升钢丝绳的长度和提升加速度,Fa为作用于小车机构的驱动力,g为重力加速度。
在桥式起重机空行程时,吊钩的质量相对于小车机构较轻,可忽略不计。则桥式起重机在空行程时小车机构线性化模型为
桥式起重机在空行程时小车机构线性化模型的传递函数为
式中:Gp(s)是桥式起重机在空行程时小车机构的线性化模型。
2 控制策略
桥式起重机的工作过程具有周期循环的特点,每一次循环通常经历空行程运行、货物运送和卸料3个阶段。桥式起重机的空行程运行又包括空车取物和空车复位2个阶段,桥式起重机空行程运行的效率完全依赖操作者的经验,不熟练的操作者可能会来回操作大车和小车机构多次才能准确进行空车取物和空车复位,增加了运输时间,降低了运输效率。因此,针对桥式起重机在空行程时小车机构的线性化模型,提出了2种不同的控制策略以进行性能比较。
2.1 PD反馈控制策略
为研究输入整形算法对桥式起重机在空行程时小车机构的控制效果,首先提出了PD反馈控制策略。PD反馈控制系统如图2所示。

图2 PD反馈控制系统
图中:Gp(S)为桥式起重机小车机构线性化模型,kdS+kp为PD反馈控制器,kd为微分增益,kp为比例增益,R(s)为参考输入命令,F(s)为作用于小车机构的控制力,X(s)为小车机构的位移,参考输入命令与小车机构的位移作差形成E(s),即偏差信号。图2所示的PD反馈控制系统的传递函数为
从式(5)不难看出,PD反馈环节的作用是将在空行程时小车机构的线性化模型转化成二阶闭环系统,其中比例增益确定了系统的固有频率,;比例增益和微分增益共同确定了闭环系统的阻尼比,。小车机构的动态性能由固有频率与阻尼比决定,因此,通过合理设计kd和kp的参数来确定小车机构的固有频率与阻尼比,从而改善桥式起重机在空行程时小车机构的动态性能。
2.2 PD结合输入整形控制策略
通常情况下,输入整形器作为单独的模块放在闭环系统的外面,与PD反馈控制结合共同构成一个新的控制系统。输入整形器的一般形式为
式中:Ai为第i个脉冲序列的幅值,ti为第i个脉冲作用时间,n为脉冲个数。
PD结合输入整形控制系统如图3所示。

图3 PD结合输入整形控制系统
Fis(s)为输入整形后作用于小车机构的控制力,Xis(s)为输入整形后小车机构的位移,输入参考命令经过整形后,与小车机构位移作差形成偏差信号Eis(s),即输入整形后的偏差信号。故图3所示的控制系统的传递函数为
根据桥式起重机的工作情况来选取输入整形器的类型,选取两脉冲的ZV输入整形器,则ZV输入整形器的传递函数为
式中:A1为第1个脉冲幅值;A1为第2个脉冲幅值;K为参数;t1为第1个脉冲作用时间,t1=0;t2为第2个脉冲作用的时间。
3 小车机构的位移及控制力
3.1 在PD反馈控制策略控制下小车机构的位移及控制力
在PD反馈控制策略控制下小车机构的位移为
式中:R(s)为阶跃输入命令,一般形式可表示为R(s)=k/s。
在零初始状态下,对式(9)进行拉普拉斯反变换,得到在PD反馈控制策略控制下小车机构的位移在时域内表达式为
式中:Asys、φ分别为由系统参数引起的振动幅值与振动初始角度。
在PD反馈控制策略控制下作用于小车机构上的控制力为
在零初始状态下,对式(14)进行拉普拉斯反变换,得到在PD反馈控制策略控制下作用于小车机构上的控制力在时域内表达式为
3.2 在PD结合输入整形控制策略控制下小车机构的位移及控制力
在PD结合输入整形控制策略控制下小车机构的位移为
在零初始状态下,对式(19)进行拉普拉斯反变换,得到在PD结合输入整形控制策略控制下小车机构的位移在时域内表达式为
式中:Ais为由输入整形器引起的振动幅值;ωd为闭环系统的有阻尼振动频率,;ψ为由输入整形器引起的振动初始角度。
在PD结合输入整形控制策略控制下作用于小车机构上的控制力为
在零初始状态下,对式(23)进行拉普拉斯反变换,得到在PD结合输入整形控制策略控制下作用于小车机构上的控制力在时域内表达式为
式中:Ais和ψ同式(21)、式(22)。
4 仿真研究
基于Matlab仿真软件创建桥式起重机在空行程时小车机构的数值仿真模型,利用所设计的输入整形器在阶跃输入命令控制下进行仿真。
考虑到实际的桥式起重机的工作过程,不希望桥式起重机的固有频率过高,而比例增益kp确定了闭环系统的无阻尼固有频率。故所设计的控制系统的比例增益kp不能设置过大。为了便于比较2个控制系统,选取误差带Δ=0.02,则PD反馈控制系统的调整时间为
PD反馈控制系统和PD结合输入整形系统的时间常数设置为
式(25)、式(26)确定了系统调整时间ts、时间常数tc与微分增益选取kd之间的关系。小车机构质量m=150 kg,设期望位移x=6 m,tf设置为30 s。
4.1 小车机构位移仿真
比例增益kp选为50、100和150,微分增益kd=120。桥式起重机在空行程时,在阶跃输入命令控制下小车机构位移如图4所示。

图4 在阶跃输入命令控制下小车机构位移
从图4中可以明显看出,PD结合输入整形系统的调整时间较未整形的系统变快了。由式(25)知,在小车机构质量确定的情况下,控制系统的微分增益与调整时间成反比,系统的微分增益越大,则系统的调整时间就越小,在微分增益确定的情况下,控制系统的调整时间为定值10 s。而PD结合输入整形控制系统下的调整时间则是ZV输入整形器第二个脉冲作用的时间,分别为7.545 9 s、4.413 6 s和3.427 8 s。在相同比例增益的情况下,PD结合输入整形系统的超调量明显低于PD反馈控制系统。在阶跃输入命令控制下,小车机构位移曲线的超调量与比例增益成正比,比例增益越大,桥式起重机在空行程时小车机构位移曲线的超调量也越大。
4.2 小车机构控制力仿真
桥式起重机在空行程时,在阶跃输入命令控制下小车机构的控制力如图5所示。
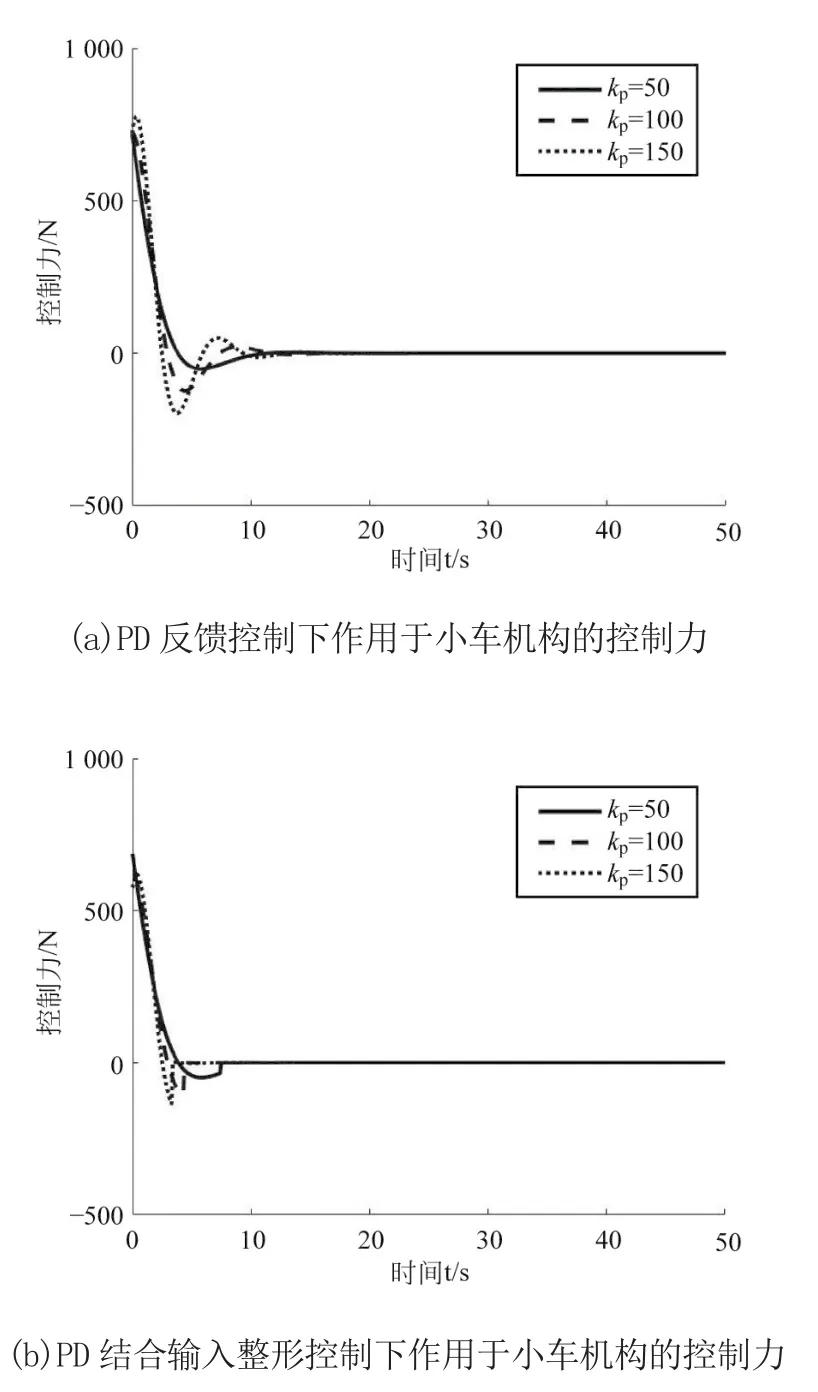
图5 在阶跃输入命令控制下作用于小车机构的控制力
从图5可以看出,桥式起重机在空行程时,在kp相同时,在PD结合输入整形控制策略控制下作用于小车机构上的控制力比PD反馈控制策略控制下的小。在阶跃输入命令控制下,控制力幅值与比例增益成正比,比例增益越大,作用于小车机构上的控制力就越大。在PD反馈控制策略控制下作用于小车机构位移所产生的超调量明显大于PD反馈控制策略控制下的超调量,而超调量过大则会导致小车机构在短时间内不能趋于稳定,这就意味着在桥式起重机控制小车机构的过程中将消耗更多的控制力才能使小车机构到达指定位置。与PD反馈控制相比,在阶跃输入命令控制下PD结合输入整形控制策略控制下小车机构需要的控制力可在较短的时间内趋于稳定。
4.3 系统能耗仿真
系统能耗作为衡量设计的控制策略是否具有工程使用价值的一项重要指标,需将其考虑在内。将能耗定义为,即控制力对时间的积分,tf是小车机构运动终止时间。在阶跃输入命令控制下控制小车机构的能耗如图6所示。

图6 在阶跃输入命令控制下控制小车机构的能耗
从图6可以看出,在阶跃输入命令控制下,经输入整形过的小车机构消耗的能量明显低于未整形前的小车机构消耗的能量。随着比例增益的增大,控制小车机构所消耗的能量也随之增加。
5 结论
基于桥式起重机在空行程时小车机构的线性化模型,提出了PD结合输入整形控制策略,通过仿真研究证明了由于输入整形器的作用PD结合输入整形控制策略能有效降低小车机构空行程运行超调量和调整时间,提高了小车机构的工作效率,降低了作用于小车机构控制力和能耗,PD结合输入整形控制策略优化了小车机构动态性能。