可应用于多尺寸无人潜航器转运平台设计
2023-03-25王甜甜WANGTiantian
王甜甜WANG Tian-tian
(青岛海安航行设备有限公司,青岛 266000)
0 引言
无人潜航器越来越多地应用于海洋领域,其主要功能是进行海洋/水库等水域探测、搜索、替代人员执行未知或危险任务。根据使用用途、功能和性能的不同,无人潜航器种类繁多,重量从几十公斤到数百公斤不等,主尺度变化很大;同时,目前市场客户端批量订购同款无人潜航器的微乎其微,基本都是单独订制,这就造成了无人潜航器型号品种多、单款数量少的情况。
转运车作为无人潜航器是转运的专用装置,主要应用于生产车间转运过程或在船艇甲板吊装区与存放区之间的转运,目前现有的无人潜航器转运车只能运输固定尺寸的产品,无法满足多种型号尺寸的无人潜航器转运的要求,如果船艇上配备多型号无人潜航器,势必由于主尺度、线型的不同,造成每个型号无人潜航器都必须配备一个专用的转运车,造成原本就紧张的船用空间更加局促,造成资源的浪费(如图1、图2)。

图1 意大利Pluto Plus 无人潜航器

图2 美国Bluefin-12 无人潜航器
为了解决每型潜航器配备一个转运车的设备资源及空间资源问题,本方案设计了一种适用于多尺寸无人潜航器运输的转运平台,即在通用平台上,设置可自由调整位置及便于更换、调整的线型墩,实现高度、间距和半宽的选择和调整,从而达到转运平台多型号兼容、操作便捷、减少资源浪费的目的。同时,无人潜航器为了减小水下阻力,其线型均设计为近圆柱形或水滴形(如图3),这就为本方案的实现提供了更大的可行性。

图3 美国:“蓝色锥齿鲨”无人潜航器
1 多尺寸转运平台的设计思路
为了实现适用于多尺寸无人潜航器转运,需要从根本上解决多尺寸转运平台对多种主尺度无人潜航器的兼容,多尺寸就是指无人潜航器的长度、宽度、线型有明显区别和变化,转运平台需要适配多种尺寸的无人潜航器。
本设计将多尺寸转运平台分为上下两层,上平台为托架,托架上设置有托板作为升降台,升降台设置有滑槽,滑槽内设置安装可滑动滑块,滑块上设有弧形墩,由滑块和弧形墩组成线型墩,根据不同线型,选取适当的进行更换,以满足不同线型的无人潜航器要求;下层为驱动机构安装平台,兼做结构强度件,通过传动机构连接上层托板,达到横向、垂向可调的要求;多功能转运平台总体设有灵活的可移动方式及可靠的固定方式。
2 多尺寸转运平台的详细设计
2.1 托板设计
为适应多尺寸无人潜航器,将托架平台设计为多向可调式,即纵向、横向、垂向均可按照不同尺寸进行调整。
如图4 所示,托板21 上设置有滑槽22,滑槽22 内设置可滑动的线型墩23。线型墩对称布置,可沿转运平台纵向滑动及任意位置停止、固定。线型墩由上下两部分组成,下半部分为滑块231,上半部分的弧形墩232,通过螺栓固定在滑块上,该部分为线型部分,可进行更换、调整,以适应不同型值的无人潜航器。

图4 托板设计
线型墩设计为可沿滑槽任意滑动、并停留在任意位置可固定的方式,解决了纵向适应无人潜航器长度的问题,线型墩上半部分的弧形墩,可根据无人潜航器线型简单更换,解决了线型问题。
如图5、图6、图7、图8 所示,滑槽的底部设置有开槽212,开槽内转动安装有旋转轴25,旋转轴25 的上表面设置有若干阵列的螺旋弧形槽251,每个螺旋弧形槽内滑动安装有一个转轴252,转轴的上端固定安装在滑块底部。当旋转轴转动时,可以带动转轴沿着螺旋弧形槽移动,从而带动滑块沿着滑槽移动。因为线型墩两两对称,从而可以保证线型墩同步向两侧同步移动。这种中心对称结构,保证在调整线型墩半宽时,可以同步向两侧展开,保证无人潜航器与转运平台的中线面重合。

图5 托板俯视图

图6 驱动轴连接示意图
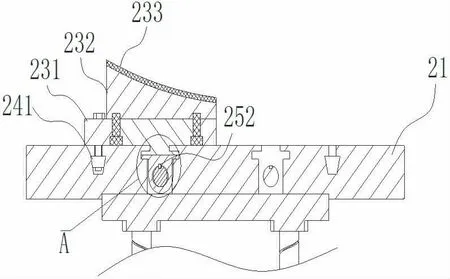
图7 图2A--A 剖面图
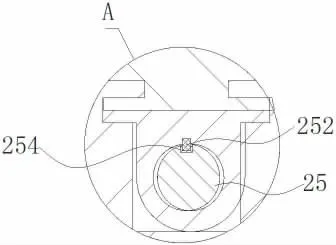
图8 图4A 局部放大图
2.2 传动机构设计
如图9 所示,本方案在下层平台上设置有蜗轮蜗杆传动机构,通过垂向机械操控,带动上层托板上升或下降;通过横向机械操控,带动线型墩同步向两侧展开,操作便捷、省时省力。
对应两排线型墩下方设置有两根旋转轴25,两根旋转轴之间传动连接。如图6 所示,当旋转旋钮261,从而带动驱动轴26 转动,进而带动两根旋转轴同时旋转,从而带动两排线型墩同时调整半宽值。此设计解决横向适应无人潜航器宽度的问题。
下层平台底部设有万向轮,可使多功能转运平台灵活运动,在万向轮上设置有刹车装置,保证停放时的稳定、可靠。
转运平台总体设计示意图如图9 所示。

图9 转运平台总体设计示意图
3 设计及使用实例
根据本公司生产的多型无人潜航器尺度,转运平台托架尺寸为4500mm*1000mm 时,可满足重量1000 千克及以下、主尺度6000mm*Φ800mm 及以下的无人潜航器的转运。表1 为本公司生产的产品实例。
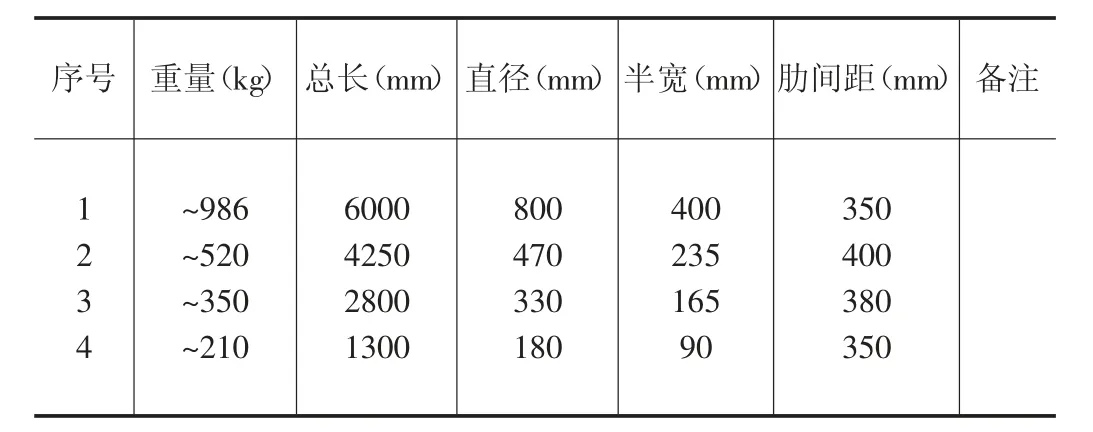
表1 产品实例选型
总体采取框架式结构设计,局部进行加强。托板、升降台、平台、立柱等均选用不锈钢材质,设计有3 组立柱连接上下平台,连接处设有局部加强及腹板,上下平台背面设有加强筋,保证结构强度。
传动机构选用机械式蜗轮蜗杆传动机构。其中两组立式丝杠,由一个升降控制机构控制同步;一组水平式丝杠,由一个横向控制机构控制。传动机构与升降平台连接处设有局部加强。
在生产1300mm*Φ180mm 无人潜航器时(下称1#),根据内部横隔壁位置、舱室分隔及结构加强位置,设计了四组线型墩,间距350mm,半宽90mm,基线距托架高度150mm。
四组线型墩的滑块根据图纸位置进行定位,测定中心线、间距、半宽值,然后将线型墩用紧固螺栓固定在滑槽内;通过传动机构升降平台,测定基线高度,选取R90mm弧形墩(1 号墩和4 号墩视实际线型选取适当弧形墩,或采用橡胶等软质材料调整),使线型墩整体与潜航器外型吻合,符合公差要求,将1#潜航器吊装至转运平台上,对相关机械结构锁定或打开后,开展装配、转运等工作。
在生产4200mm*Φ480mm 无人潜航器时(下称2#),根据内部横隔壁位置、舱室分隔及结构加强位置,设计了10 组线型墩,间距350mm,半宽240mm,基线距托架高度200mm(尾部有附体)。
首先在原四组线型墩两侧,各增加三组线型墩滑块,使得中心线、间距、半宽值与1#的原四组线型墩一致,用紧固螺栓固定在滑槽内;然后操作平台下方传动机构横向控制,带动10 组线型墩向两侧同步展开,到达半宽值为240mm 时停止;选取R240mm 弧形墩(1 号墩和10 号墩视实际线型选取适当弧形墩,或采用橡胶等软质材料调整),更换弧形墩,使得线型墩整体与2#线型吻合;操作平台下方传动机构升降控制,调整基线高度至200mm。对相关机械结构锁定或打开后,开展下一步工作。
4 总结
针对每型潜航器配备一个转运车的设备资源及空间资源浪费问题,设计了无人潜航器多尺寸转运平台,通过将车身结构与托架结构分开,托架结构上配有滑槽,通过调节线型墩的纵向位置来适配不同长度的无人潜航器,当无人潜航器的线型或直径发生变化时,仅更换弧形墩即可,从而达到一个平台可适用多个不同尺寸的无人潜航器的转运要求,降低了设备存放的空间,节省了设备制作费用。