城市轨道交通全自动洗车关键技术研究
2023-03-20何文娟胡泽庶
何文娟 胡泽庶

关键词:城市轨道交通;全自动洗车;故障导向安全
0引言
随着我国城市轨道交通全自动线路的大力发展和建设,从既有的后备、基于通信的列车自动控制(communication based train control,
CBTC)
线路到现在的全自动无人驾驶线路,从轨道电路车场到现在的全自动化场段(停车场和车辆段),从常规的作业方式到智能化的作业方式,业务量持续增长,这对场段配置的要求越来越高,本文对场段内的全自动洗车系统的设计方案进行详细介绍,对全自动洗车的功能进行部署和执行。
城市轨道交通全自动洗车技术的发展将给用户带来更高效、更环保的洗车体验,满足用户的不同需求,但全自动洗车设备的应用还需要考虑到成本和维护问题。
1洗车流程
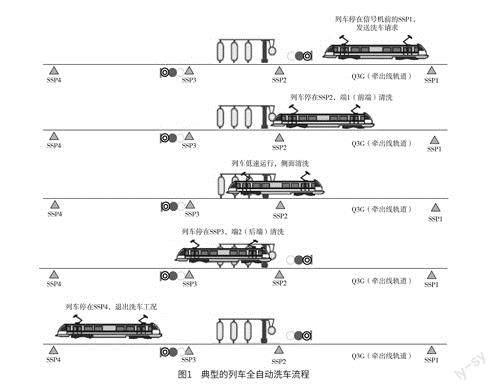
基于城市轨道交通信号平面布置思路,本文研究了一种典型的列车全自动洗车流程(图1),具体的全自动洗车流程如下。
1.1请求洗车
列车要执行洗车作业,首先依据列车自动运行监控系统(automatic train supervision,ATS)下发的洗车计划,当列车进入牵出线轨道( Q3G)且停稳时,列车对标轨面应答器停车点1(SSP1),建立起请求洗车的基本技术要求。
1.2进路建立
全自动洗车模式下,洗车机将洗车模式设置为“自动”模式,且在收到洗车机的洗车就绪状态信息后,ATS根据洗车运营计划、列车位置、洗车请求自动选排洗车进路。
1.3全自动洗车
当列车收到进路信息和洗车机就绪状态信息后,自动操纵列车低速运行,逐步通过洗车机外围洗车设备,完成洗车作业。
1.4结束洗车
当列车全部驶出洗车机外围设备区域,信号系统通过列车运行位置判断洗车是否完成,当洗车完成后,信号系统参照进路建立过程自动将列车调回存车线。
系统提供“全洗”“仅侧洗”等洗车模式选择,车辆段值班人员在设置洗车计划时,可选择一种洗车模式。列车在Q3G停稳后触发由右向左的洗车进路,停在停车点2(SSP2)处进行车头端洗,车头端洗结束后向停车点3(SSP3)运行,在运行的过程中进行侧洗,当车运行至SSP3时停车,进行车尾清洗,清洗完毕后运行至停车点4(SSP4),退出洗车工况。
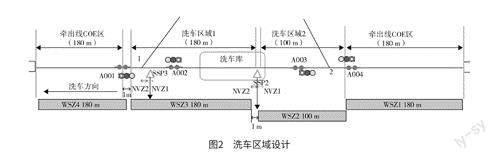
2洗车区域
在整个洗车流程中,会经过4个洗车区域(washing zone,WSZ),WSZI为第一个洗车区域,依次类推。如图2所示,WSZI是列车洗车初始化的区域,列车停稳后发送洗车工况,等待进路分配并与洗车机进行交互使用。WS22是列车进行头部端洗区域,当车头端洗时,列车必须停稳在SSP2处,SSP2设计在与洗车机端刷间距为0.5m的范围内,若超过该范围,洗车机无法判断列车的位置、激活端刷进行清洗。WS23是车尾清洗区域,列车应在SSP3处停稳,如果无法停稳在与SSP3间距为0.5m的范围内,洗车机无法激活端刷进行清洗,SSP3的位置设计原则是考虑SSP2在端刷处,往左端推算一个车长的距离而确定的。
在设计时,WSZ1和WS24无须特殊配置,因为这两个区域处有折返换端(change of end,COE),COE将会自动生成WSZ1和WS24,来完成列车的折返停稳。图2中非关键区域(non vitalzone,NVZ)的长度均为1m,NV22用来判断是否过停,NVZ1用来判断是否停准。具体判断标准为:当车头与NVZ1有交集、与NV22无交集的情况下,认为列车停准;当车头越过NVZ1,与NV22有交集了,认为列车过停;当车头未到达NVZ1,认为列车欠停。AO01~A004为计轴设备。
需要特别设计的是WS22和WS23,WS22的起点为WSZ1的终点,这两个区域相互连接,WS22的终点依赖于SSP2的位置,设计在与SSP2间距为0.5m的范围内,只要该区域能包含SSP2即可;WS23的起点设在与WS22的终点后间隔1m的位置,WS23和WS22不相交,该1m也是NV22的区域长度,WS23的终点是WS24的起点,WS23的区域要包含SSP3的NV22和NVZ1的范围。
3停车属性
停车属性要与洗车区域联合使用。如果是全洗,必須由3个部分组成:洗车头、侧洗、洗车尾,当全洗计划下发后,ATS会在WS22和WS23处发送目的码,车运行到WS22的SSP2处和WS23的SSP3处自动停车,这两个位置不依赖于列车自动控制系统(automatic train control,ATC)控车,因此WS22和WS23洗车区域的默认停车属性设置为FALSE(FALSE即默认不停车)即可,停车属性平面化设计如图3所示。
当下发侧洗计划后,侧洗不进行洗车头和洗车尾,仅对车的侧面进行清洗,在这种情况下无须在SSP2和SSP3处停车,ATS在WSZ1发送目的地码至WS24处,WS22和WS23不会有目的地码,因此不会停车,此时默认停车属性不能设置为TRUE(TRUE即默认要停车),否则会侧洗失败,由此可见,洗车的停车属性由ATC子系统配置设置为FALSE,无须设置成TRUE。
4信息交互
当洗车机模式为自动模式、列车驾驶模式为全自动驾驶模式(fully automatic mode,FAM)时,洗车机、信号系统、车辆之间的信息交互如图4所示。列车全洗车过程如下所述。
列车进入Q3G且停稳,打开洗车库门,启动洗车机,洗车机准备就绪。确认开始洗车,系统为待洗列车设置洗车库前停车位置的目的地为SSPI,并授权列车运行至洗车库前停车;列车运行至洗车库前停准后,将待洗列车设置为洗车工况后,向洗车机发送洗车请求。洗车机根据洗车请求,确认准备就绪后,给信号系统反馈洗车就绪、允许通过1和允许通过2。
列车运行至下一个停车点SSP2停准后,向洗车机发送端洗请求1的高电平。洗车机将允许通过1设置为低电平,通过激光探头检查列车在前端洗停车范围时,启动前端洗模式。信号系统根据允许通过1为低电平,控制列车输出停车制动命令,使列车停车。
当前端洗完成后,洗车机将洗车刷移回侧洗位置,以允许列车向前运行。洗车机将允许通过1设置为高电平。收到允许通过1的高电平后,信号系统取消停车制动,以允许列车向前运行至下一个停车点SSP3。列车运行至SSP3停准后,向洗车机发送端洗请求2的高电平。洗车机将允许通过2设置为低电平,通过激光探头检查列车在后端洗停车范围时,启动后端洗模式。信号系统根据允许通过2为低电平,控制列车输出停车制动停车。
当后端洗完成后,洗车机将洗车刷移回侧洗位置,以允许列车向前运行。洗车机将允许通过2设置为高电平。收到允许通过2的高电平后,信号系统取消停车制动,以允许列车向前运行至SSP4。
列车在SSP4停准后,信号系统判断洗车完成,向车辆发送取消洗车工况。车辆取消洗车工况后,信号系统向洗车机取消发送洗车请求,为列车设置返回车库的目的地,洗车结束。
如果洗车工况为侧洗,则收到洗车机反馈的允许通过1和允许通过2后,列车运行到SSP4处停车并退出洗车工况,在洗车的过程中,洗车速度不能超过5km/h。
5结语
本文介绍了一种全自动洗车方案,其已应用于卡斯柯信号有限公司项目,目前已在全自动运行场段中实现了全自动洗车功能,提高了洗车效率。全自动洗车功能安全、可靠、稳定,洗车机故障可使车保持在制动状态,符合“故障导向安全”原则,且在未来更多的全自动项目中具有重要的参考意义。
