基于VMD和改进CNN的舰船辐射噪声识别方法
2023-03-20倪俊帅胡长青
倪俊帅, 胡长青, 赵 梅
(1.中国科学院声学研究所东海研究站,上海 201815;2.中国科学院大学,北京 100049)
舰船辐射噪声中蕴含着能够反映舰船“身份”的特征信息,是用来识别舰船目标的一种重要有效手段。随着信号处理技术和人工智能技术的进步与发展,舰船辐射噪声特征提取和识别成为近年来研究的热点,对提高被动声呐系统感知和辅助决策能力具有重大意义。舰船辐射噪声信号具有周期性、非平稳、非高斯、非线性[1]的特性,高识别度特征提取困难,特别是海上舰船目标,受到海洋环境噪声和其他船只噪声干扰,直接利用时域信号很难提取稳定的特征参数,也不易构建良好拟合泛化的深度学习网络模型。因此,对信号进行处理和变换后提取特征,应用机器学习或深度学习进行识别,是近年来广泛的研究思路。
在传统的特征提取方面,杨宏等[2]利用集合经验模态分解分析舰船辐射噪声能量,提取了高低频能量差作为特征参数用于分类识别;Wang等[3]应用固有时间尺度分解处理舰船辐射噪声信号,提取复杂度特征进行分类;李余兴等[4]提出了基于变分模态分解和中心频率的舰船辐射噪声特征提取方法,对四类舰船进行了有效的区分;Xie等[5]提出了基于增强变分模态分解、归一化相关系数和排列熵的舰船特征提取方法;李余兴[6]将最优IMF的中心频率和排列熵作为特征参数并应用支持向量机进行识别;李余兴等[7]提取了集合经验模态分解最强固有模态的中心频率特征,相比于高低频能量差特征可分性更好。由于传统的特征提取方法得到的特征维数低、信息量少,很难表达舰船辐射噪声的多声源特性和舰船航行的动态复杂性,因此在复杂环境下的适应性和识别效果较差。深度学习能有效提取高维非线性特征,实现舰船工况时变规律建模,对低信噪比舰船辐射噪声具有较好的鲁棒性。此外,卷积神经网络能充分提取波形结构和局部细节信息,具有位移不变性[8],适用于图像和时间序列的识别任务。王小宇等[9]提出了改进卷积神经网络实现端到端的水声目标自动识别方法;Li等[10]提出了用于水声目标辐射噪声音色感知的卷积神经网络模型;Wang等[11]提出了多特征融合和修正的深度神经网络模型;Shen等[12]提出了类听觉机制的卷积神经网络模型;黄擎等[13]提出了小波分解和改进CNN相融合的水声目标识别方法,均取得了较好的识别效果。
为提高海上低信噪比舰船目标识别准确率,同时降低识别系统运算成本,本文提出了一种基于VMD和改进CNN的舰船辐射噪声识别方法,首先,对舰船辐射噪声信号进行预处理;然后,通过经验模态分解确定VMD的阶数,分解预处理舰船辐射噪声信号,得到若干固有模态分量;最后,将所得若干个固有模态分量进行融合,输入改进的卷积神经网络,从而得出识别结果。在传统CNN基础上,引入深度可分离卷积、批标准化和全局平均池化,提出改进的CNN模型。开展东海试验获取了12艘船舶的辐射噪声数据并对其进行识别,与其他7种舰船辐射噪声识别方法进行了对比,本文方法识别正确率具有明显的提高。
1 舰船辐射噪声数据
1.1 舰船辐射噪声数据获取
2020年1月,在东海某海域开展了舰船辐射噪声获取试验。试验地点位于航道附近,有货船、渔船及其他船只经过。将水听器固定于铁架上置于水下一定深度,被测船舶在水听器上方附近海面通过时,其辐射噪声将被自动记录下来。试验过程中,结合AIS数据记录来船信息,包括名称和航速等。试验仪器布放方案如图1所示。

图1 试验仪器布放Fig.1 Layout diagram of test instruments
1.2 舰船辐射噪声数据分析
试验过程历经3小时,获取了12艘船的辐射噪声数据,包含3艘渔船、7艘货船、1艘游船和1艘执法船。船舶目标的具体信息如表1所示。其中,信噪比由船舶经过水听器正横方向时的辐射噪声信号与无船经过时的背景噪声信号计算得到,定义为

表1 舰船目标相关信息Tab.1 Ship target related information
(1)
式中:xs为舰船辐射噪声信号;xo为海洋环境噪声信号;N为采样点数。
当目标船舶经过水听器上方海面附近时,海上可见其他船舶航行,获取的数据不可避免的受到其他船舶的干扰。由于舰船辐射噪声自身特点和声传播特性,不同频段的干扰程度有所不同。水听器记录数据的时频功率谱如图2所示。

图2 水听器数据的时频功率谱Fig.2 Time frequency power spectrum of hydrophone data
大型船舶航速低,产生的低频噪声辐射距离远。由图2可以看出,在120 min时大型货船经过水听器正横位置,并呈现出一定的通过特性,结合AIS数据、观测记录和听觉感知可知,其通过正横位置的前后各50 min的时间,对其他目标船舶辐射噪声产生了干扰,在低频部分尤为明显。考虑到舰船辐射噪声的通过特性,以目标船舶经过水听器正横位置的时间为中心截取数据,得到12艘船时长各4 min的辐射噪声数据,采样率为20 kHz。为了减少低频噪声的干扰,降低不同船舶因干扰噪声产生的相似性,对获取的数据进行高通滤波,截止频率为200 Hz。
2 VMD
2.1 VMD原理
变分模态分解是一种新的基于维纳滤波、希尔伯特变换及混频的自适应分解方法,通过搜寻约束变分模型的最优解可将原信号分解成一组具有稀疏特性的IMF分量。不同于EMD方法,VMD将每个IMF定义为调频-调幅信号,可表示为
uk(t)=Ak(t)cos(φk(t))
(2)
式中:Ak(t)为瞬时幅值;φk(t)的导数为瞬时频率。假设每个模态uk具有中心频率和有限带宽,约束条件为每个IMF的估计带宽最小,且所有IMF之和等于输入信号,约束模型表示为
(3)
式中:K表示IMF的数量;f为输入信号;{uk}={u1,u2,u3,…,uK}表示分解得到的K个有限带宽的IMF分量,{wk}={w1,w2,…,wK}表示各个IMF的中心频率。为了解决式(1)的约束性变分问题,引入惩罚因子α和Lagrange算子λ(t),将式(1)变为非约束性变分问题,得到扩展的Lagrange表达式为
L({uk},{wk},λ)=
(4)
采用交替方向乘子算法(alternate direction method of multipliers,ADMM)求取式(2)的“鞍点”得到估计的uk及相应的wk。在频域对uk,wk,λ进行更新,表示为
(5)
(6)
(7)
式中,τ为更新因子。算法具体的实现步骤下:
步骤3:重复步骤1~步骤2,直到满足迭代停止条件,即
(8)
式中,r为阈值。经过以上步骤,VMD分解完成并得到k个IMF分量。
2.2 舰船辐射噪声信号的VMD处理
舰船辐射噪声主要由机械噪声、螺旋桨噪声、水动力噪声组成,是多声源耦合的宽带的非平稳信号。从物理意义上看,机械、设备等周期性的运动和轴承、螺旋桨转动产生的周期线谱是频谱低端的主要成分;螺旋桨空化噪声,气缸点火和部件摩擦等产生的高频谐波分量是频谱高端的主要成分;机械噪声和螺旋桨噪声的大多成分则以线谱和连续谱的形式存在于舰船辐射噪声的中间频段。
VMD处理可有效降低舰船辐射噪声非平稳性,并且分解为一组有限带宽的固有模态分量,可用以表征舰船辐射噪声在不同频带上的特性,能有效反映舰船的固有物理特征。分解的所有模态中有包含主要信号的模态和包含噪声的模态,相对于原信号,可减小环境噪声和其他船只辐射噪声的干扰。虽然其作用类似于带通滤波器,但其自适应分解能体现出除了物理特征之外的信号内在特征,如中心频率和带宽等。
接下来,对某次试验获取的2艘船(船A和船B)的辐射噪声数据做VMD处理。通过经验模态分解(EMD)所得固有模态阶数,确定VMD的阶数k=8。船A和船B的时域波形(WAVE)、IMF分量及其对应的归一化频谱分别如图3(a)、图3(b)以及图3(c)、图3(d)所示。

(a) 船A时域波形和IMF分量

(b) 图(a)对应的归一化频谱

(c) 船B时域波形和IMF分量

(d) 图(c)对应的归一化频谱图3 时域波形和IMF分量及其归一化频谱Fig.3 Time domain waveform, IMF component and their normalized spectrum
由图3可以看出,通过VMD处理,舰船辐射噪声被分解成为不同中心频率和带宽的IMF分量,其中,1阶IMF分量能够体现原信号的包络特征及其他波形特点,具有更好的平稳性,2艘船的1阶IMF分量存在差异;各阶IMF分量的幅度比反映了舰船辐射噪声的能量分布特点,即低频部分能量较高,高频部分能量较低,两艘船各自的IMF分量能量比不同;由图3(b)和图3(d)可以看出,虽然中心频率高的IMF分量幅度小,但其归一化频谱仍存在一定的特点,也能反映舰船特征;IMF存在明显的局部结构,可作为识别舰船的特征。因此,提取IMF的局部细节特征,并充分利用各阶IMF分量包含的特征,可以对舰船辐射噪声实现更好的特征提取和识别。
3 改进CNN
3.1 CNN原理
3.1.1 深度可分离卷积
在传统的卷积计算过程中,每一步都对所有通道对应区域进行计算,计算过程会产生大量参数。而MobileNet网络[14]提出了深度分离卷积(depthwise separable convolution, DSC),先对每一通道的区域进行卷积计算,然后进行通道间的信息交互,实现了通道内卷积和通道间卷积的分离。
传统标准卷积既过滤输入又将过滤后的输出进行组合,假设输入图像大小为DF×DF的M通道图像,使用尺寸为DK×DK的卷积核与之进行卷积计算,得到一组新的N通道输出特征图,其计算量可以表示为
DK·DK·M·N·DF·DF
(9)
深度分离卷积将一个标准卷积分解成一个深度卷积和一个逐点卷积[15]。深度卷积在输入的每个通道使用DK×DK的卷积核进行特征提取,产生与输入通道数个数相同的结果,最后将得到的各个通道对应的卷积结果作为最终的深度卷积结果,完成输入特征图的过滤,其计算量为
DK·DK·M·DF·DF
(10)
逐点卷积过程与标准卷积类似,将深度卷积的结果作为输入,利用N个卷积核大小为1×1的点卷积完成对深度卷积输出的线性组合[16],实现通道间的信息传递,能够改变通道数量,完成升维或降维的功能。逐点卷积的运算量为
M·N·DF·DF
(11)
(12)
因此,深度分离卷积的计算量与标准卷积计算量比值可以由式(12)给出。当使用5×1大小的卷积核时,深度可分离卷积的计算量可以减小至标准卷积的五分之一。相比标准卷积来说,使用深度分离卷积能够更好地节约计算资源,减少分类时间,提高分类性能。
3.1.2 批标准化
为了更好的提取特征,减少参数间依存关系,缓解可能发生的过拟合现象,在特征提取网络中每经过一个深度卷积和逐点卷积后,都会使用ReLU[17]或Tanh[18]函数进行处理,以加强非线性表达能力。同时,为了加快网络的收敛速度,防止梯度爆炸,提高模型的精度,会在激活函数前加批标准化(batch normalization, BN)层[19]。BN层计算过程可见公式(13)。
(13)

3.1.3 全局平均池化
在一些传统的卷积神经网络中,卷积层提取的特征输送到分类器前至少需要经过一个全连接层(Dense),如图4所示。该层含有较多的训练参数,增加了模型的复杂度和计算开销,且容易造成模型过拟合。此外,该层和其所连接的密集层产生的各种排列组合输送到分类器产生分类结果时,并不清楚究竟是哪种排列组合对分类结果产生作用,结果的可解释性低。

图4 全连接层工作原理Fig.4 Working principle of full connection layer
全局平均池化[20](global average pool,GAP)对每一个上层通道进行全局平均,从而学习每个特征图的全局信息,每个特征图均被映射为一个特征值,从而得到一组特征向量,如图5所示。该过程不引入额外的训练参数,能有效防止模型过拟合。全局平均池化起到了连接特征图和分类器的桥梁作用,赋予每个通道实际的类别意义,剔除了密集连接层的黑箱结构,使特征提取具有更好的可解释性。
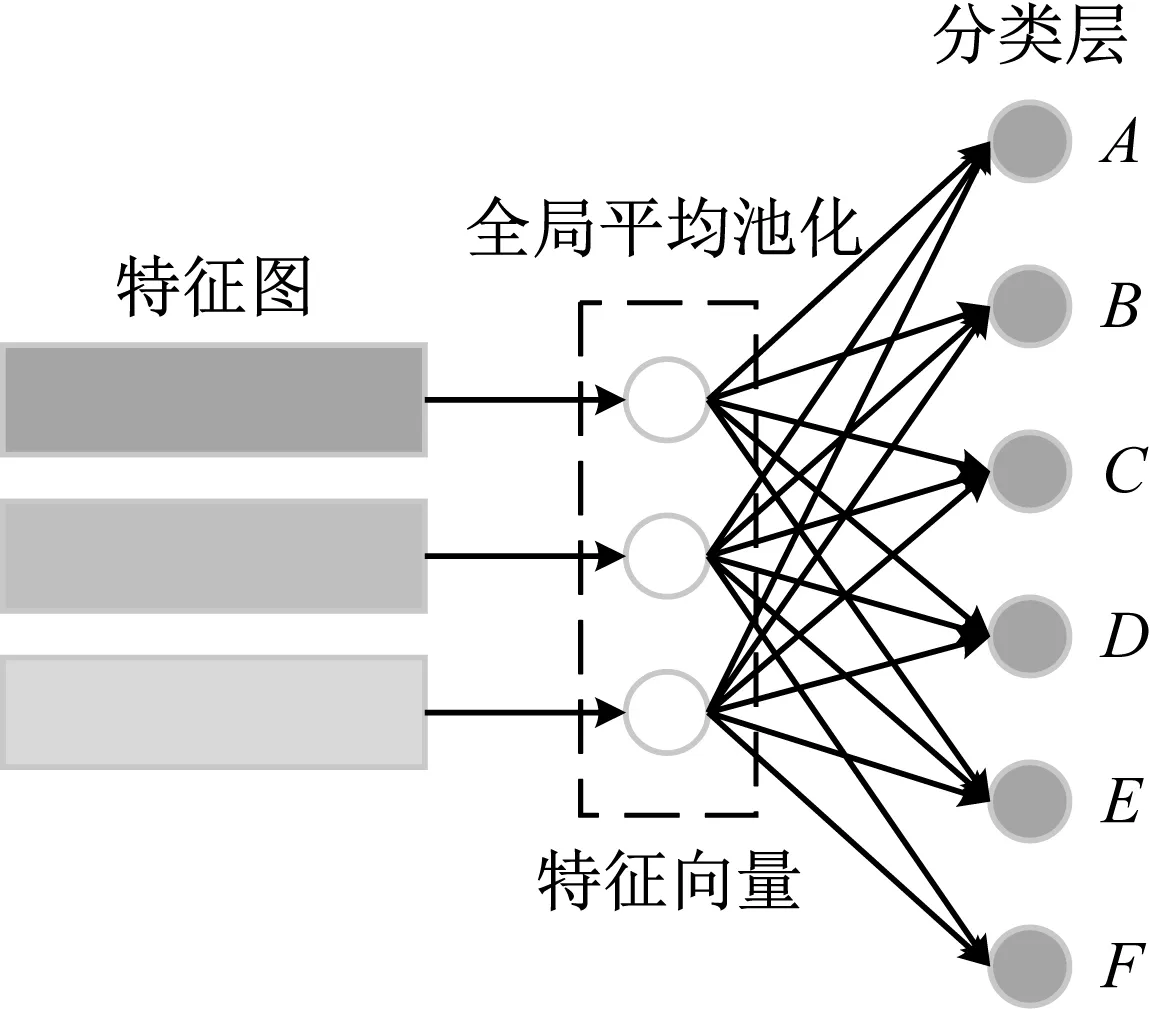
图5 全局平均池化层原理Fig.5 Principle of global average pooling layer
3.2 改进CNN模型
舰船辐射噪声的产生机理及其周期、时变的特性决定了它的时域信号存在特殊的波形结构和局部细节特征,可用来对舰船目标进行识别。卷积神经网络不仅具备深度学习的非线性建模能力,而且能够提取信号的局部模式,具有时移不变性,适应周期性非平稳舰船辐射噪声信号的特征提取和分类识别任务。传统卷积神经网络的特征提取部分通过卷积运算提取特征并利用最大池化运算进行特征降采样,在这一过程中应用激活函数实现非线性特征提取;在分类部分,应用Flatten层将前级特征图展平为一维向量,然后通过全连接层和Softmax分类器拟合特征向量到分类结果的映射关系。其结构如图6所示。
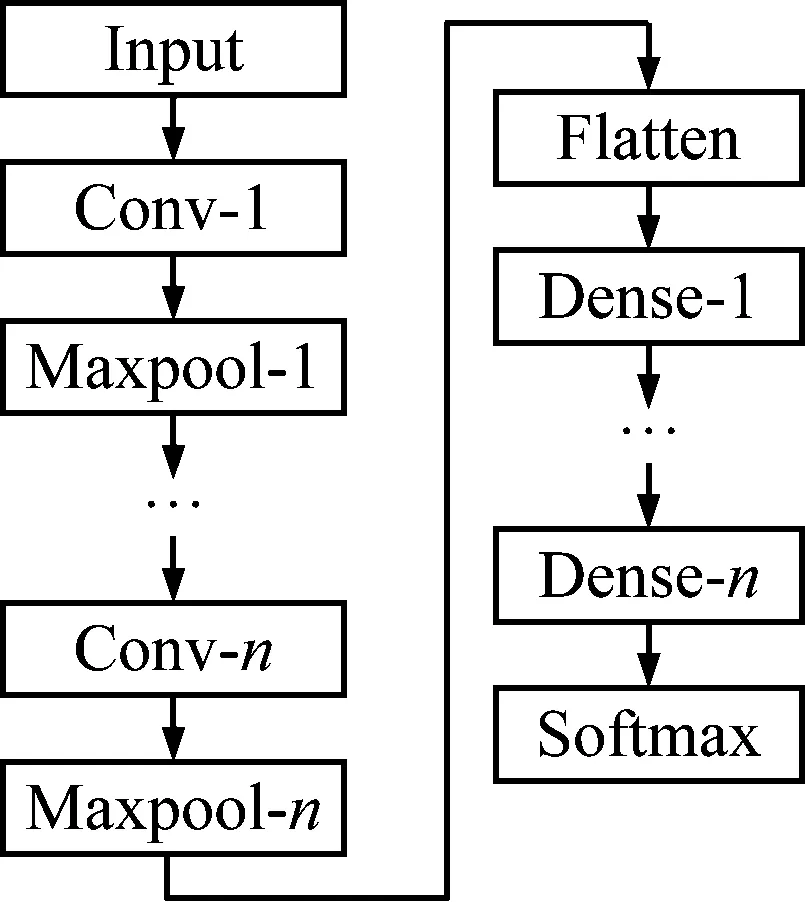
图6 传统卷积神经网络结构Fig.6 Structure of traditional convolutional neural network
目前舰船辐射噪声识别方法的研究大多将若干舰船分为3-5个类别,本文基于实测舰船辐射噪声数据,将舰船目标分为12类进行识别,分类数量的增加对卷积网络的特征提取和分类能力提出了更高的要求;海上低信噪比舰船辐射噪声识别任务,需要更多的卷积层提取足够数量的可识别特征,卷积层的增加和全连接层的作用,不仅导致训练参数的增多,增加运算成本,降低识别速率,还容易使网络产生严重的过拟合。
因此,本文兼顾识别能力和运算成本,提出一种改进的卷积神经网络模型,主要改进内容如下:
(1) 改进的卷积网络引入DSC层和BN层。有5个卷积模块,它的深度结构能实现更高层次的特征提取;每个卷积模块包含3个DSC层和3个BN层,代替传统CNN网络的普通卷积操作,保证特征提取能力的同时实现网络的轻量化。
(2) 改进的卷积网络使用两种尺寸的卷积核提取特征。卷积模块中间的DSC层卷积核尺寸为1×1,可增强局部特征的表达能力,并实现特征图的跨通道结合;卷积模块两端的DSC层卷积核尺寸为5×1,与1×1卷积核组合能够提取不同尺度的特征,提高局部信息的感知能力。
(3) 最后一个卷积模块的MaxPool层的通过GAP层与Softmax分类器相连接,取代了全连接层的过渡方式,减少训练参数,提高特征提取的可解释性和网络的拟合能力。
改进的卷积网络结构如图7所示。网络的输入层有m个通道,用于输入VMD的m阶固有模态分量,能够融合提取各阶模态的局部模式和细节特征。
4 舰船辐射噪声识别试验
为了验证本文所提方法对多类别低信噪比舰船辐射噪声的识别性能,利用东海试验获取的12艘船舶的辐射噪声数据进行测试,同时与传统CNN模型和其他几种方法进行对比。
4.1 改进CNN识别试验及结果
首先,考虑到VMD的运算速率和改进卷积网络的输入尺寸,将1.2节中所述12艘船舶的辐射噪声数据按照5 000个采样点进行截取并归一化,共得数据11 520段,每艘船960段,每段数据时长为0.25 s。通过12艘船部分样本的EMD阶数确定VMD阶数k=8,然后对所有分段数据进行VMD处理,得到相应的IMF分量。将每个样本的IMF分量按中心频率由低到高的顺序排列,分别记为IMF1~8。随机取每艘船560个样本作为训练数据,训练集样本数为6 720。每艘船剩余的400个样本作为测试数据,测试集样本数为4 800。然后,应用本文提出的改进CNN模型进行识别。CNN模型的输入为8个IMF分量,输入方式如图8所示。

图8 CNN模型的输入Fig.8 Input of CNN model
试验采用的主要硬件配置为,CPU:i5-10400F(2.9 GHz);GPU:GTX1660Ti(6GB);内存:16 GB。试验首先采用基于python语言的TensorFlow和Keras环境搭建改进CNN网络模型,利用CUDNN加速运算。使用误差反向传播算法和多分类交叉熵损失函数进行迭代,其中,损失函数见公式14。
(14)

接下来,通过大量试验确定网络模型的超参数如下:根据IMF的数据分布特点采用Tanh函数在BN层之后进行非线性激活;批次样本数(Batch Size)设置为64;迭代次数设置为150;采用Optimizer优化器进行梯度优化,学习率为0.000 2。改进CNN在训练集和测试集上的迭代结果如图9所示。

(a) 正确率曲线

(b) 代价函数曲线图9 改进CNN模型的迭代曲线Fig.9 Iterative curve of improved CNN model
由图9可以看出,随着迭代次数的增加,改进CNN模型的正确率曲线和损失曲线均稳定地趋于收敛,说明网络具有良好的拟合泛化能力,可用于舰船辐射噪声的识别。通过多次试验,改进CNN网络迭代150次,对测试集的平均识别正确率为98.6%,平均损失为0.06,识别结果具有较高的正确率和可信度。为了明确改进CNN模型对每艘船的特征提取和识别情况,应用T-SNE算法可视化GAP层的256维特征向量如图10所示,计算识别结果的混淆矩阵如图11所示。
由图10和图11可以看出,改进的CNN模型提取的特征向量具有高区分度特点,对多艘舰船的样本能够准确识别。但编号为“02”、“03”、“04”的3艘船特征向量存在部分重叠,识别错误率主要来自于3艘船的混淆。
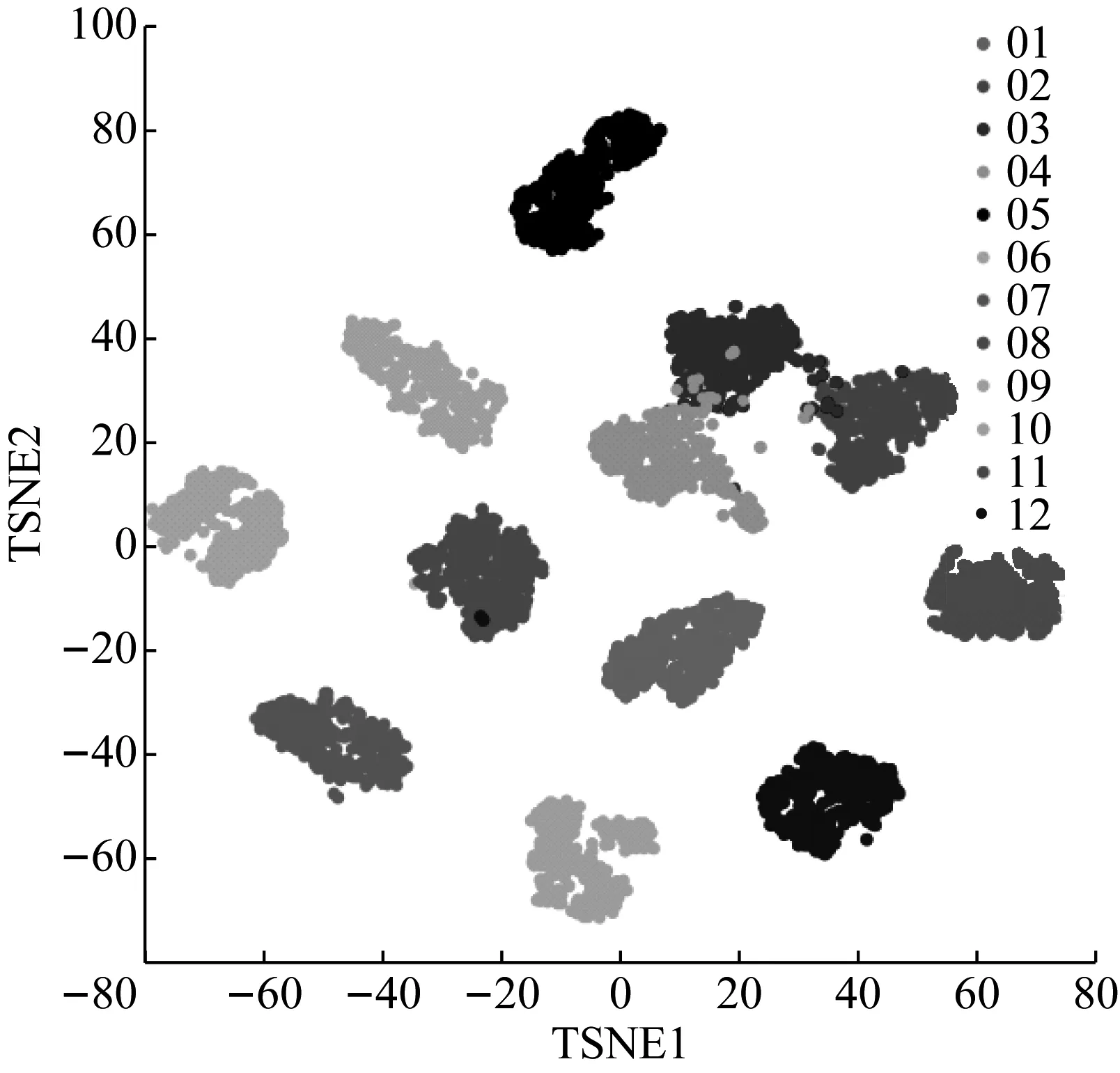
图10 GAP层特征向量的T-SNE可视化结果Fig.10 T-SNE visualization results of GAP layer eigenvectors
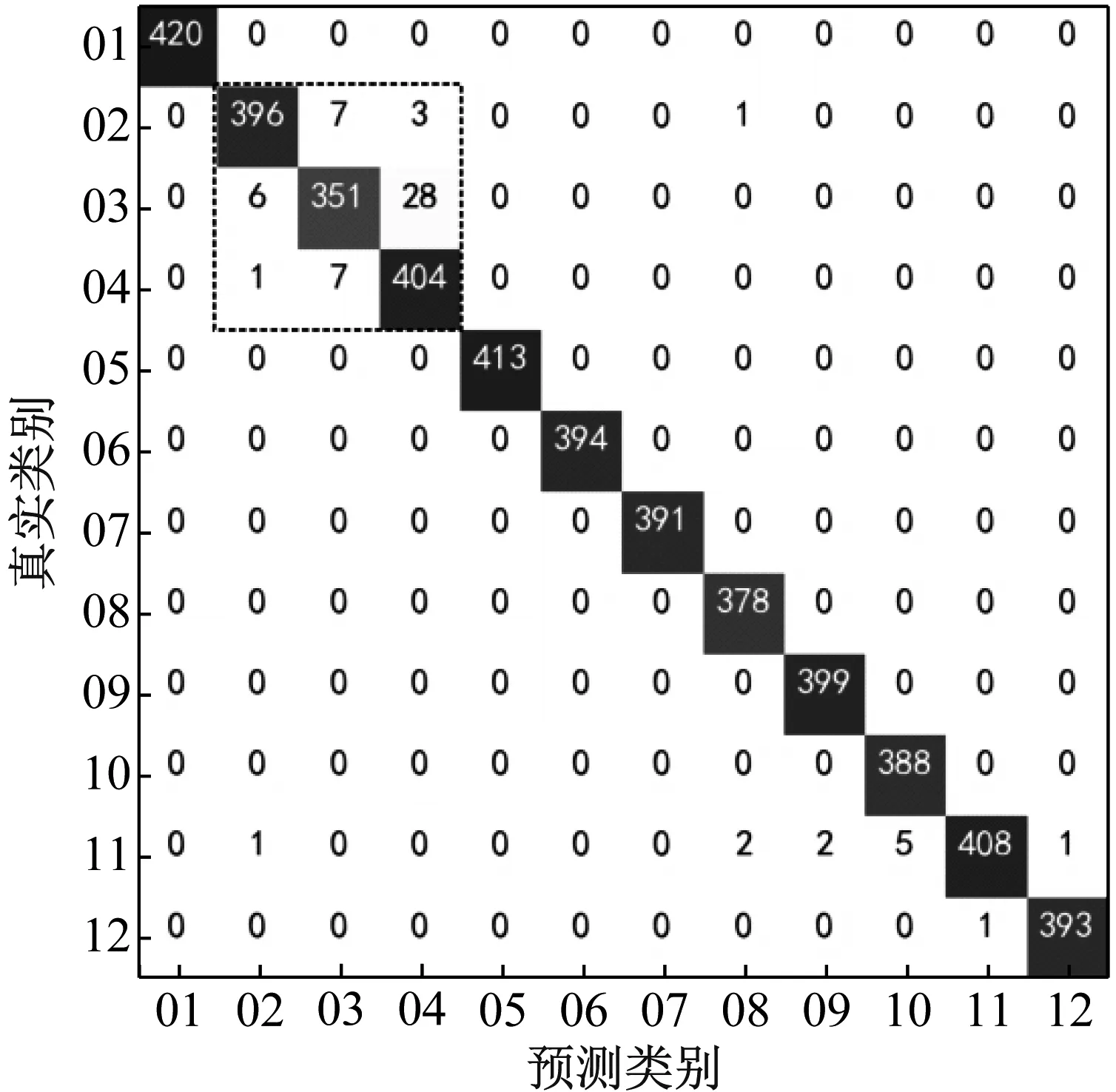
图11 识别结果的混淆矩阵Fig.11 Confusion matrix of identification results

(a) 正确率曲线
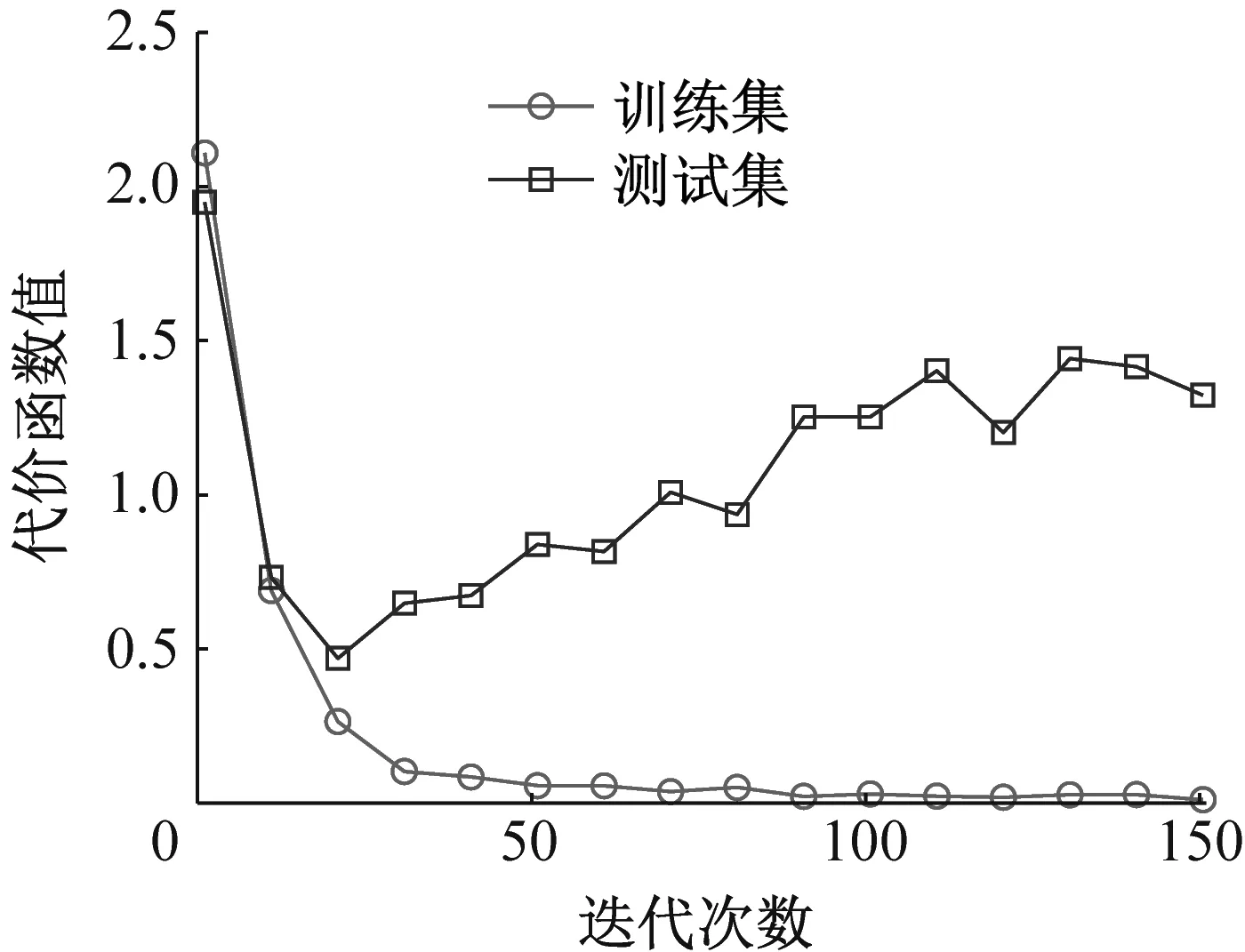
(b) 代价函数曲线图12 传统CNN模型的迭代曲线Fig.12 Iterative curve of traditional CNN model
4.2 识别方法对比
首先,与传统CNN网络模型进行对比。为了体现改进CNN模型设计的合理性和轻量性,这里将作为对比的传统CNN模型与改进CNN模型设定为相同的输入尺寸和卷积模块结构,传统卷积网络的最后一个卷积层输出特征图通过Flatten层展平为一维向量,并添加丢弃率为0.1的Dropout层降低过拟合。同时为减少训练参数,分类部分采用一个256节点的全连接层和Softmax分类器相连接。具体结构参数,如表2所示。然后,采用和改进卷积网络相同的方式进行训练,训练和测试曲线如图13所示。

表2 传统卷积网络结构Tab.2 Traditional convolution network structure
在相同的卷积模块结构下,通过图12和图9对比可以看出,虽然传统CNN模型较改进CNN模型收敛速率快,但传统CNN在迭代20次后发生过拟合,且迭代过程较改进CNN模型在测试集上的正确率低、损失值大。两种模型识别正确率和平均损失对比如表3所示,其中传统CNN取第20次迭代时模型的平均损失。

表3 模型识别性能比较Tab.3 Comparison of model recognition performance
本文改进CNN模型的识别正确率比传统CNN模型高出14.1%,平均损失比传统CNN模型小,说明改进CNN网络更好地提取了IMF特征,识别结果置信度更高。由表4可以看出,改进的CNN模型训练参数数量和运算量均显著减少,因此,可节省运算成本,提高识别速率。

表4 模型参数和运算性能比较Tab.4 Comparison of model parameters and operation performance
然后,应用本文提出的改进CNN网络模型,将输入层通道数m设为1,通过某一阶归一化的IMF分量识别舰船辐射噪声,调整合适的超参数设置保证网络良好拟合。识别结果如表5所示。

表5 改进CNN模型识别IMF结果Tab.5 Identification results of improved CNN model
本文提出的改进CNN模型可以对舰船辐射噪声VMD固定阶数的IMF分量进行识别,识别正确率随着阶数增大而增大,识别置信度除1阶IMF之外随着阶数的增大而减小,这是因为海上舰船目标辐射低频干扰更严重,利用低频信息识别舰船目标相对困难,但是1阶IMF识别置信度高于2阶和3阶IMF,这一现象可通过主轴磨损与发动机点火噪声的基频和低次谐波主要集中在IMF1的共有频段,以及VMD噪声模态中扔包含原信号的部分信息两个方面来解释。所得结果表明高频分量差异性和局部细节特征更有利于低信噪比海上舰船目标辐射噪声的识别。但相比于本文融合IMF分量输入改进CNN模型识别的方法,识别正确率至少降低7.9%,识别置信度也有不同程度的减小。
最后,基于本文舰船辐射噪声数据集,将提出的基于VMD和改进CNN的舰船辐射噪声识别方法与时域波形、功率谱估计(PSD)、梅尔倒谱系数(MFCC)、IMF中心频率作为特征的几种识别方法[21-23]进行对比,结果如表6所示。使用PSD或MFCC作为特征参数时,深度神经网络(DNN)比支持向量机(SVM)识别正确率更高,分别为81.6%和90.6%;文献[6]提出的SVM识别IMF中心频率的方法识别正确率为85.5%;传统CNN模型直接对舰船辐射噪声时域信号识别正确率为81.8%,而本文改进CNN模型对时域信号识别正确率为93.4%,相比之下提高了11.6%;本文方法识别正确率最高为98.6%。

表6 8种方法的识别结果Tab.6 Identification results of 8 methods
5 结 论
本文提出了基于VMD和改进CNN的舰船辐射噪声识别方法,适用于海上低信噪比舰船辐射噪声的识别问题。结合舰船辐射噪声的特点对VMD方法和改进CNN模型进行了分析,使特征提取和识别结果更具可解释性。在东海试验12艘信噪比不高于5 dB的船舶辐射噪声数据上对方法进行了验证,识别正确率明显高于其他7种对比方法。另外,本文提出的改进CNN模型可用于对其他表征舰船辐射噪声的时间序列进行识别,在运算成本和速率上较传统CNN模型更具优势。
