民航维修工具智能取送车设计
2023-03-20徐伊可郭宗龙张延幸刘元杭郭洪岩马国利
曾 亮,徐伊可,郭宗龙,张延幸,刘元杭,郭洪岩,2*,马国利,2
(1.滨州学院 航空工程学院,山东 滨州 256600;2.山东省航空材料与器件工程技术研究中心,山东 滨州 256600)
根据近几年的交通运输行业发展统计公报统计数据可以发现,民航飞机出行的灵活性虽然比不上陆地交通工具,但因其速度快、路程时间短,使人们感受到的疲惫感很大程度上的降低,所以每年客机的客流量非常巨大,民航飞机的维修工具还有各种物资的种类和数量也是成倍的增加。目前为止,民航物资的运输搬运主要依靠人力,而且地勤人员的搬运方式各种各样,没有一种简单便捷的运输方式。航空物资不仅种类多,而且数量巨大。因此本设计对于物资的分拣系统具有十分重要的意义。况且机场每天的航班出入量也逐渐增加,地勤人员在搬运物资的时候往往会混淆飞机型号,导致出现错搬错运的现象,这必然会浪费地勤人员的工作时间,影响效率,也会对航空公司的效益产生影响。
为方便机务人员借用维修工具,特研制了一款民航维修工具智能取送车,采用微信小程序+智能搬运小车的方案实现本设计的功能。
1 硬件组成与核心模块介绍
本设计主要由智能搬运车和上位机控制程序组成。主体车身底部车轮采用麦克纳姆轮[1],利用直流伺服电机[2]调节电源电压有调速平滑性好、稳定性好的特点,在狭小且多变的环境通过TB6612FNG 电机驱动模块的使能引脚输入PWM 波,改变占空比使小车自由运行,依靠红外模块检测距离,实现精准避障,全方面移动。无线模块采用ZigBee 无线串口收发模块,利用无线传输技术[3],进行点对点的实时数据传送,实现串口的双向同步收发。ATK-S1216F8-BD 双定位模块,该模块采用S1216F8-BD 模组,体积小、性能优越,实现对小车的精准定位。智能搬运车的主控芯片为STM32F407,该芯片体积小、质量轻及功能强大。检测模块采用OpenMV4H7 摄像头模块对实景进行数据采集。本设计使用由DS3225MG 舵机所组成的四自由度机械臂,利用16 路舵机控制器直接驱动舵机机构,减少在底层舵机驱动上消耗的时间,优化舵机的控制。系统硬件整体设计如图1 所示。

图1 系统硬件整体设计图
1.1 摄像头模块
物体检测是智能搬运车感知的核心功能,要求对不同的物体设计不同的算法,去准确检测出所需要的航空物资。物体检测要求实时准确地完成单帧的物资检测,并借助传感器内外参标定转换矩阵,将检测结果映射到统一的车身坐标系或世界坐标系中。本设计采用的是OpenMV4H7 摄像头模块,如图2 所示。该模块具有高灵敏度、高像素及低电压等优点,适合嵌入式应用开发。且此模块具有多种自动控制功能,例如:支持自动增益控制、自动白平衡等,能够在多个不同场所情境下精准实现物体识别任务。其自带嵌入式微处理器,搭配OpenMV IDE 平台的开源库函数和资料包,能够较容易地开发,很适合机场需要运输各种种类物资的工作。

图2 OpenMV4H7 摄像头模块
1.2 舵机
DS3225MG 舵机是一种用于对产品进行一定角度定位的驱动马达,如图3 所示。不同于一般的DC 马达,此舵机可以在0~180°的范围内自由转动,适合于要求特殊角度的控制系统。这种舵机有着非常简单的构造,其由直流电机、传感器、减速齿轮和控制电路组成,是一套自动控制系统装置,具有结构简单、效率高和成本低的优势。对于舵机的位置检测就是靠输入传感器,当舵机的转动一发生转变,检测器的电阻也会发生改变,通过控制电路读取电阻值的大小,就能自动根据电阻值调整电机的速度和方向,使舵机发生特定角度的旋转,能够很好地适用机场物资搬运的任务。DS3225MG 舵机主要参数见表1。

图3 DS3225MG 舵机

表1 DS3225MG 舵机主要参数
1.3 无线模块
无线模块主要应用于远程控制领域,本设计采用ZigBee 无线串口收发模块,如图4 所示。其具有良好的与外界互通信卢的稳定性和性能。采用基于ZigBee 技术的无线传感器网络能够实现智能搬运车上对信卢的实时采集。ZigBee 是一种低速近距离内信卢实时传输的无线传输技术,相比传统的蓝牙技术具有通信距离远、传输速率快、功耗低、连接设备能力强、安全性高和和组网能力强的特点。也是一种复杂度低、使用更加方便及成本更低的近距离无线网络远程控制技术。Zig-Bee 的无线串口传输和接收模块可以通过无线方式将2 个以上的无线串行模块进行连接。通过验证,本系统可以实现点对点的数据传送,并且可以达到0.05%的失信率。此模块可实现串行不中断的传输,并能实现串口的双向同步收发,传输速度为3 300 KB/s。

图4 ZigBee 无线模块
2 系统硬件设计
2.1 串口通信设计
在进行无线功能开发时,通常情况下,都会选用无线通讯模块,这一模块的主要功能是设定无线通信接口和无线通信协议。在无线接口配置的时候,首先要确定频率、速率、带宽及调制方法等参数。要对无线通信的模块端口进行时钟使能然后复位,设置终端的功能模式,并对其参数进行初始化,最终完成端口中断功能的处理。串口通信过程如图5 所示(其中RXD 为接收数据的引脚,TXD 为发送数据的引脚)。
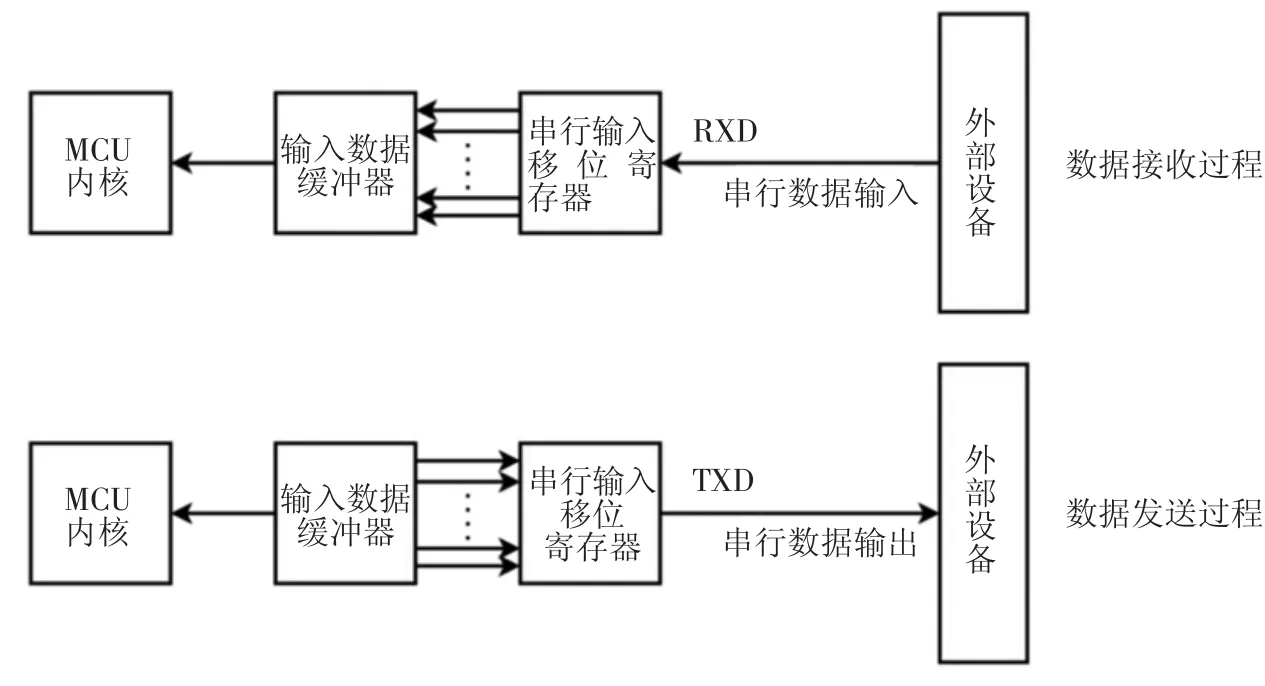
图5 串口通信过程
2.2 驱动系统设计
要想实现对小车的速度、方向控制,就要对TB6612FNG 电机驱动模块的使能引脚输入PWM 波,改变占空比的大小便可以调节小车运动状态。小车驱动系统主要是配置单片机与电机之间的连接,只需要对单片机的特定端口设置推挽输出模式便可实现相应的功能。要完成小车的运动,需要电机两端产生高低电平差,这样电机就能实现运转。电机驱动流程图如图6 所示。

图6 电机驱动流程图
2.3 机械臂设计
智能车的机械臂需要由舵机控制器来控制完成,通过串口通信的方式进行控制指令的传达,机械臂就可根据各个舵机的转动实现各种动作。舵机控制器通过调整PWM 波的占空比,改变脉宽的时间来控制机械臂上舵机的运转方向[4]。与此同时要注意的一点是,舵机控制器接收到的指令是由主控芯片所发送的控制信号的PWM波的时间参数,舵机控制器只能接收十六进制的数据格式,所以主控芯片也需要将控制指令数据格式转为十六进制。机械臂控制设计图如图7 所示。

图7 机械臂控制设计图
2.4 摄像头模块设计
智能搬运车通过STM32F407 单片机+OpenMV H7 摄像头模块,上位机通过按键控制摄像头模块采集照片,并依靠串口将照片发送给上位机。上位机采集照片将图片数据处理之后,与数据库相对比,当识别返回数据后,上位机对返回数据进行解析提取,最后将识别结果显示出来。摄像头模块流程图如图8 所示。

图8 摄像头模块流程图
3 上位机软件设计
HBuilder 是DCloud(数字天堂)推出的一款支持HTML5 编程语言的Web 开发APP 软件。该软件轻巧、极速,C++架构,启动速度、编码提示响应极快。有强大的语法提示,语法提示精准、全面、细致,转到定义和重构完善等特点。
通过手机进入软件后,在主界面显示物资分类、物资选取及手册和个人中心。在物资选取界面内能够选择所要搬运的物资,然后在个人中心提交命令,指令就会传递给搬运小车进行搬运任务。上位机操作流程图如图9 所示。
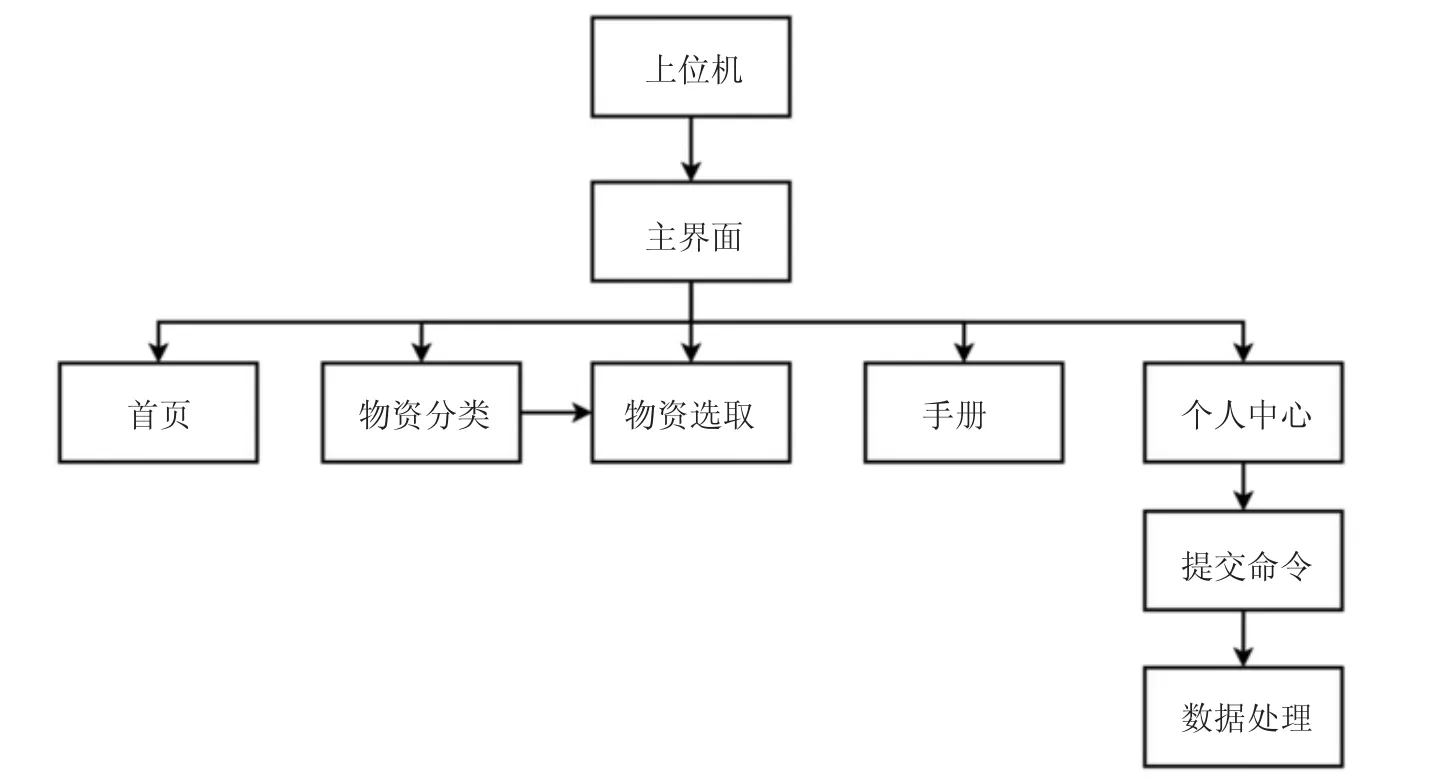
图9 上位机操作流程图
4 结束语
本设计结合实际生活现状,通过翻阅大量相关文献对当前民航物资搬运工作做出深入分析,发掘出当前机场物资搬运现状的不足,并设计了一款基于单片机的航空物资智能搬运车系统,充实了当前智能车在机场中的应用,也减少了不必要的人力资源的消耗。本设计分为硬件设计和软件设计2 部分,把物联网和互联网相互结合,具有很高的创新性和实用性[5]。本设计相比较传统的人力物资运输,能够更高效、更精准地完成工作,通过上位机发出指令到智能搬运车,搬运车前往指定地点并通过摄像头识别所需物资,最后通过导航模块到达目的地,在完成任务后进入待机状态。本设计既能提高地勤人员工作效率,减少不必要的劳动力流失,又能提高民航效益,促进民航业的发展。
