基于Simulink 仿真的施肥机模糊神经网络PID 控制方法
2023-03-20张荣丹梁春英邹立雯李圳鹏
张荣丹 ,梁春英 ,李 普 ,王 淞 ,邹立雯 ,李圳鹏
(黑龙江八一农垦大学工程学院,黑龙江 大庆 163319)
随着自动化技术的成熟,自动化技术在农业生产领域得到了广泛应用,并与农业装备相结合。但大部分用于农业生产的自动化装备还处于研制阶段,大部分施肥机与自动化技术的结合度较低。施肥机的主要部件是施肥机构,目前施肥机构有外槽轮式、转盘式、离心式、螺旋式、星轮式、振动式等多种类型,不同类型的肥料释放机构具有不同的特性和功效。通过对比分析,螺旋杆施肥机构最适合田间自动变量施肥装置。基于自动化技术的螺旋排肥机构的主要工作原理如下:将电机与排肥器相连接,然后依靠电机带动带有螺旋叶片的转轴工作,螺旋杆排肥机构在电机驱动下在封闭的肥箱内旋转,肥箱内有进肥口和出肥口,通过叶片螺杆的转动推动肥料从进肥口进入,从出肥口排出,控制器可根据实际施肥情况调节电机的控制参数控制施肥量。农用电气设备的部件十分复杂,易受到环境因素的影响,但农用设备通常在高温、潮湿等恶劣的工作环境下进行作业,极易降低实际效果,无法准确控制施肥量,且易导致农用电气设备故障频发[1]。因此,需要一种成本低、运行稳定、施肥量控制精确、受工作环境影响小的施肥机控制系统。而控制系统的控制方法是整个农机设备电气控制的核心,也是保证农机设备稳定运行的关键[2]。本文根据农业需要,结合农业装备研究现状,将步进电机模糊神经网络PID 控制方法应用于农业施肥装备,该方法可自动调节系统参数,使设备适应不断变化的田间复杂环境,以提高农机设备的可靠性和稳定性。
1 建立电机数学模型
自动化施肥装置主要由控制器、步进电机、步进电机控制器、直流电源和排肥机构5 个部分组成。除了这5 个主要的硬件组成外,还需要有软件技术等相应的支持,主要包括控制程序和控制系统软件,控制系统软件的主要任务是控制步进电机的转速和旋转角度。自动化电动变量施肥装置的工作原理是将电机连接到施肥机排肥机构转轴上,控制器通过对电机的控制调节施肥量。
本文采用二相混合式步进电机,其电路方程为:
其中,U是给步进电机施加的电压;由于线圈中的电流作用,E是由电流而产生的反电动势;L是线圈的等效电感;R为等效电阻;i为相电流。反电动势E正比于转速,则:
电机的转矩与线圈中电流也呈线性关系,即:
可以推出,以电机轴作为研究对象的运动方程为:
其中,JM为步进电机的转动惯量;θi为电机转角;σ为丝杆摩擦系数;TL为等效负载转矩;TE为电机输出转矩。负载转矩为:
其中,负载的转动惯量用JL表示;θ0表示丝杆转角。联轴器的刚性系数乘以其形变量等于负载转矩,可以表示为:
其中,用K表示联轴器的刚性系数;θi表示电机转角。因此,将步进电机转角乘以相应的一个系数之后,可以得到平台的位移,平台位移为:
其中,P为丝杆螺距。
综合上述式子,可以得到步进电机运动平台的数学模型[3],如图1所示。

图1 步进电机运动平台的数学模型
2 模糊神经网络PID控制
2.1 模糊神经网络结构
人工神经网络是一种根据人脑特性研究设计的智能控制理论,具有很强的数据调整和模式识别能力。人工神经网络具有自学习能力,当神经网络在运行过程中遇到不确定的系统和环境时,可以自动调整系统的参数以最快的速度适应新的环境。人工神经网络具有非线性映射的能力,可以根据各种排列组合来描述任何非线性系统,许多神经元以最简单的方式排列和连接可以构成复杂的非线性系统。同时,人工神经网络结构工作效率高,数据处理速度快,行为能力强,容错性强。人工神经网络包含很多神经元,每个神经元在网络中的贡献和包含的信息量是均匀分布的,当局部神经元出现错误或功率不足时,不会对整个网络系统造成过多影响,所以可以提高整个系统的容错性和耐久性。人工神经网络利用学习规则调整权值,使神经网络获得一套适应环境变化的数据结构体系。神经网络的结构基本分为两类,即反馈网络和前馈网络。本文采用前馈网络进行设计研究,前馈网络是由多个神经元相互连接而成的神经网络。前馈网络具有分层结构,由于同一层由多个彼此不连接的神经元组成,所以从输入层到输出层的信号通过神经元从一层到另一层单向连接传播,同一层的神经元之间没有连接[4]。本文设计的模糊神经网络结构如图2 所示,神经网络由输入层、模糊化层、模糊推理层、归一化层和输出层组成[5-6]。
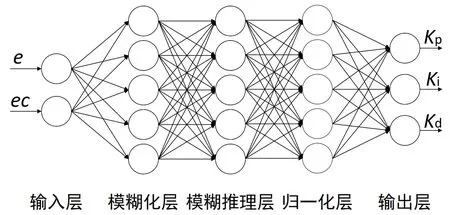
图2 神经网络结构图
2.2 控制器的设计
模糊神经网络PID 是将模糊神经网络推理与PID控制器结合起来,构建神经网络结构推理模型,隶属函数表和模糊规则,学习和训练控制模型,使输出层神经元的输出参数与PID 控制器的Kp、Ki、Kd参数相结合,Kp为比例系数、Ki为积分系数、Kd为微分系数。神经网络和模糊处理逻辑根据施肥机系统运行条件实时对控制器参数进行调整和处理,从而使PID 参数性能指标时刻处于最优状态。基于神经网络的模糊PID 控制器由传统PID 控制器、模糊模块、神经网络3个部分组成[7]。模糊神经网络PID 控制系统原理如图3所示。
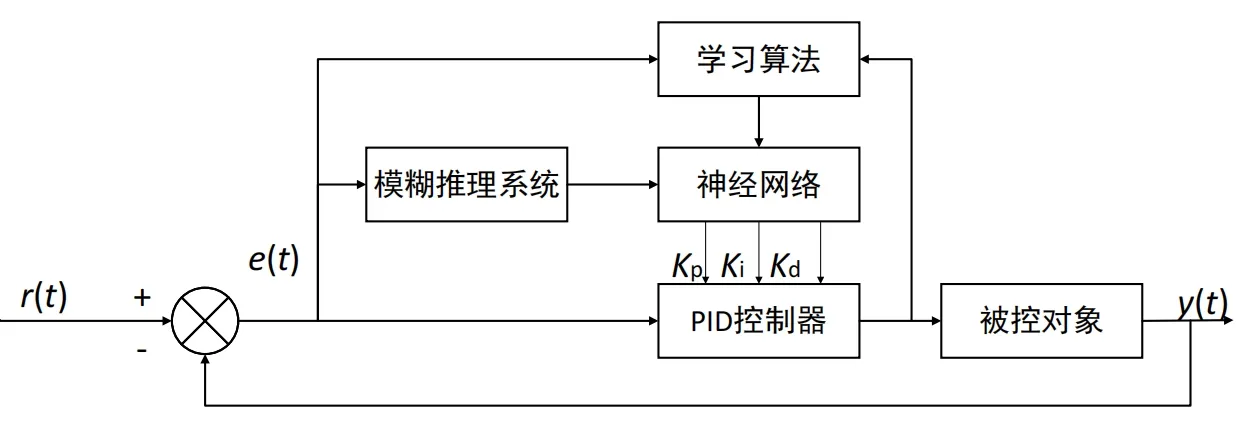
图3 模糊神经网络PID 控制系统原理图
模糊控制具有简化系统复杂度等诸多优点,特别适用于田间设备等非线性、时变、模型不完备的系统[8-9]。模糊控制技术是使用控制律来描述系统变量之间的关系的,49 条模糊控制规则如表1 所示。根据模糊规则表计算出比例系数Kp、积分系数Ki和微分系数Kd,并将其加到参数设定的初值中,即为PID控制模糊校正值。调节规则如下:上升时提高Kp,超调时降低Kp;采用积分分离法调整Ki,当误差不为零且接近于零时,Ki取0,其他情况Ki取正。自适应神经网络模糊推理模块可以对误差和误差变化率数据进行推理,在线得到一组修正的PID 参数,并提供给传统PID 调节器。该方法实现了实时参数调整,使PID 调节器能更好地适应不断变化的农田作业环境,使控制系统的动态性能和静态性能更好[10]。
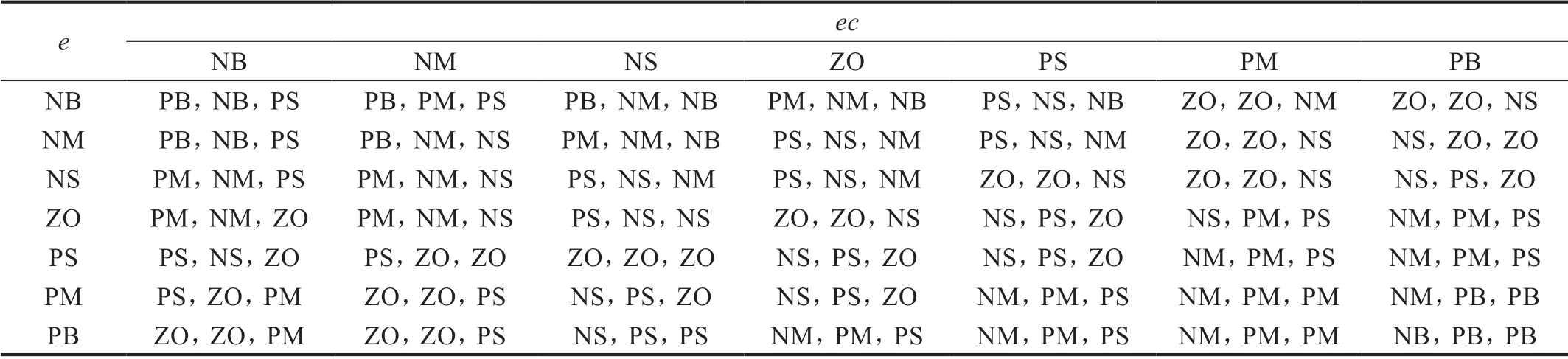
表1 模糊控制规则表
3 仿真结果分析
将训练好的模型数据保存并导入MATLAB 工作区,设计模糊神经网络PID 仿真控制器,并在Simulink 中搭建基于模糊神经网络PID 的控制系统。模糊神经网络PID 控制整体仿真模型如图4 所示,该仿真模型主要分为模糊神经网络PID 控制系统、步进电机驱动模块、步进电机控制模块、两相混合式步进电机模型等模块,如图5~图8 所示。模糊神经网络PID 控制系统仿真模型的仿真时间为0.8 s,并且0.4 s 时位置指令值由50 变为100。采样周期设置为0.01 s,输入仿真系统的误差为e、误差的变化率为ec。系统根据误差及误差的变化率不断改变权重因子,调整输出参数,使输出值始终处于最优值范围内,从而维持系统稳定。

图4 模糊神经网络PID 控制整体仿真模型
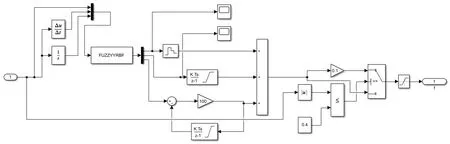
图5 模糊神经网络PID 控制系统
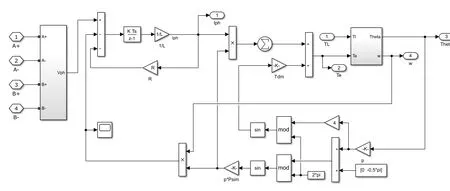
图8 两相混合式步进电机模型
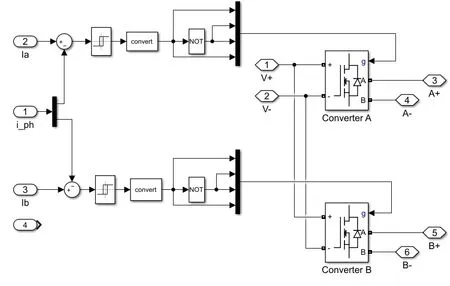
图6 步进电机驱动模块
本文通过运用MATLAB 的模糊控制工具箱设计模糊控制器,然后用MATLAB 的Simulink 进行了仿真。阶跃响应曲线如图9 所示,通过分析阶跃响应曲线图可以得知:位置指令由0 上升到50 时和位置指令由50 上升至100 时的响应时间均为0.1 s,系统响应曲线比较稳定且无超调量,系统响应效果比较理想。
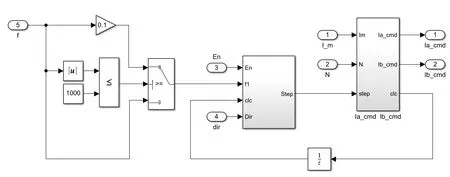
图7 步进电机控制模块
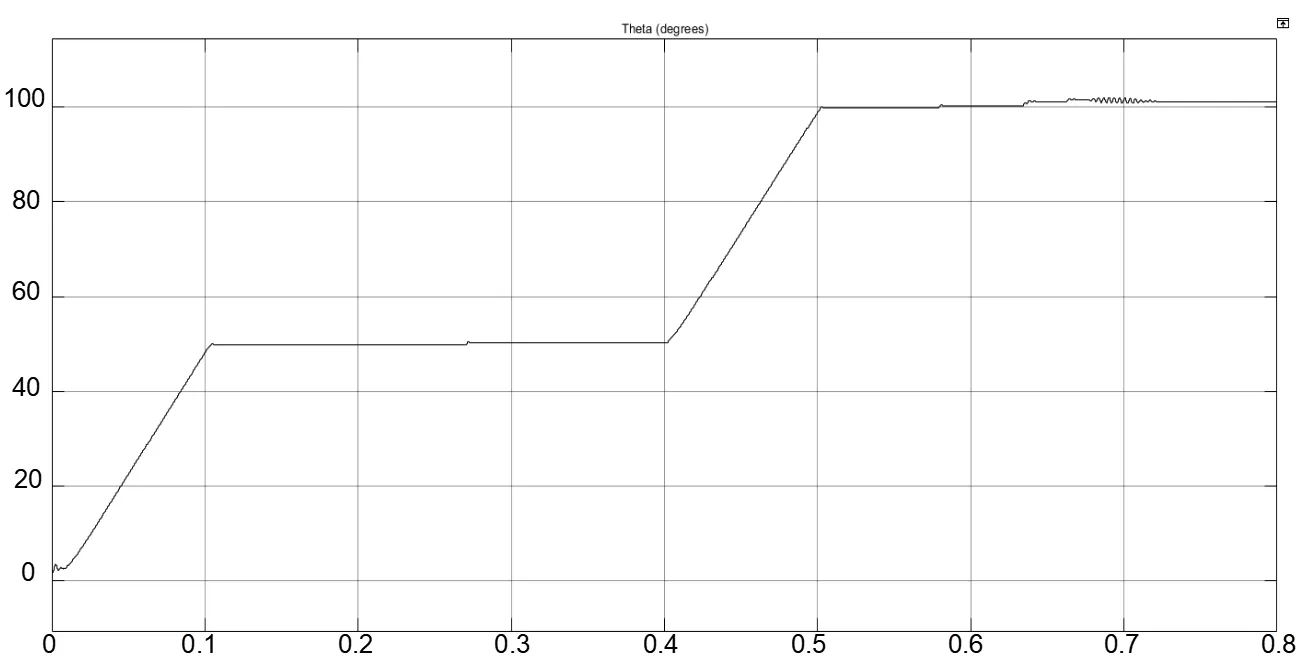
图9 阶跃响应曲线
4 结论
仿真结果表明,采用模糊神经网络PID 的算法应用在控制施肥的步进电机上时控制性能较好,无超调量、响应速度快、稳定性好、控制精度高,为进一步促进变量施肥设备的自动化发展奠定了基础。
