下肢康复机器人对脑梗死后偏瘫患者异常步态及下肢功能的改善作用
2023-03-18何海峰通信作者洪卫军周慧青罗莎
何海峰(通信作者),洪卫军,周慧青,罗莎
浙江省台州医院 (浙江台州 318050)
脑梗死是康复科较常见的一种神经系统疾病,可引起患者大脑功能受损,治疗后往往遗留单侧偏瘫,出现肌痉挛、异常步态等运动功能异常,影响下肢运动及步行功能[1]。以往临床对脑梗死后偏瘫患者常采用多种康复训练方法,其中步行训练是最重要的康复方法,但由于训练时步幅和步速较难掌握,患肢体感较差,缺乏稳定感,总体效果不甚理想[2]。近年来,机器人康复系统在下肢功能康复中的应用逐渐受到关注,该系统不仅具有模拟正常步行姿势作用,而且可通过减重装置训练下肢运动及平衡功能,对下肢行走具有较强的辅助治疗作用[3-4]。基于此,本研究分析下肢康复机器人对脑梗死后偏瘫患者异常步态及下肢功能的改善作用,现报道如下。
1 资料与方法
1.1 一般资料
选取2021 年1 月至2022 年4 月于我院就诊的脑梗死后偏瘫患者70 例,随机分为两组,各35 例。研究组中男19 例,女16 例;年龄48~81 岁,平均(63.83±5.74)岁;左侧偏瘫17 例,右侧偏瘫18 例;病程2~10 周,平均(5.94±0.72)周。对照组中男21 例,女14 例;年龄45~84 岁,平均(63.31±5.57)岁;左侧偏瘫20 例,右侧偏瘫15 例;病程2~9 周,平均(5.57±0.76)周。两组性别、年龄、偏瘫侧别和病程等情况比较,差异无统计学意义(P>0.05),具有可比性。
纳入标准:与《中国脑血管疾病分类2015》[5]制定的脑梗死诊断标准相符;存在单侧肢体偏瘫,且存在不同程度踝关节内翻和足下垂;首次发病。排除标准:非脑梗死中因素引起的偏瘫;合并其他下肢感觉及运动障碍性疾病。
1.2 方法
对照组予以常规康复训练,包括良肢位摆放、关节活动度训练、肌力强化训练、步态训练和日常生活活动训练等。
研究组在对照组基础上加用下肢康复机器人(广州一康医疗设备实业有限公司,A1 型)辅助步行训练:患者仰卧在机器人上方,用束缚带固定躯干、膝关节和脚背,调整站立角度 为90°,根据患者具体情况设定步长、步频、步速及步行时间等步态参数,30 min/次,1 次/d,5 d/周。
两组均连续训练8 周。
1.3 评价指标
(1)比较两组治疗前、后的步态参数指标:治疗前、后,采用足印分析法测量患者患侧平均步长、步宽及步速。(2)比较两组治疗前、后的下肢运动功能指标、平衡功能指标:治疗前、后,分别采用Fugl-Meyer 下肢运动功能量表(Fugl-Meyer assessment scale for lower extremity,FMA-LE)和Berg平衡量表(Berg balance scale,BSS)评估,FMA-LE总分34 分,得分越高,下肢运动功能越好;BSS 总分56 分,得分越高,平衡功能越好。(3)比较两组治疗前、后的步行功能指标:治疗前、后,采用10 m 最大步行速度(maximum walking speed,10 m MWS)测试评估患者步行速度;采用Holden 功能性步行分级法(functional ambulation category,FAC)评估患者步行能力,总分5 分,得分越高,步行能力越好。
1.4 统计学处理
采用SPSS 21.0 统计软件进行数据处理,计量资料以±s表示,采用t检验,计数资料以率表示,采用χ2检验,P<0.05 为差异有统计学意义。
2 结果
2.1 两组步态参数指标比较
治疗前,两组步长、步宽、步速比较,差异均无统计学意义(P>0.05)。治疗后,两组步长、步宽、步速均大于治疗前,且研究组大于对照组,差异有统计学意义(P<0.05),见表1。
表1 两组步态参数指标比较(±s)
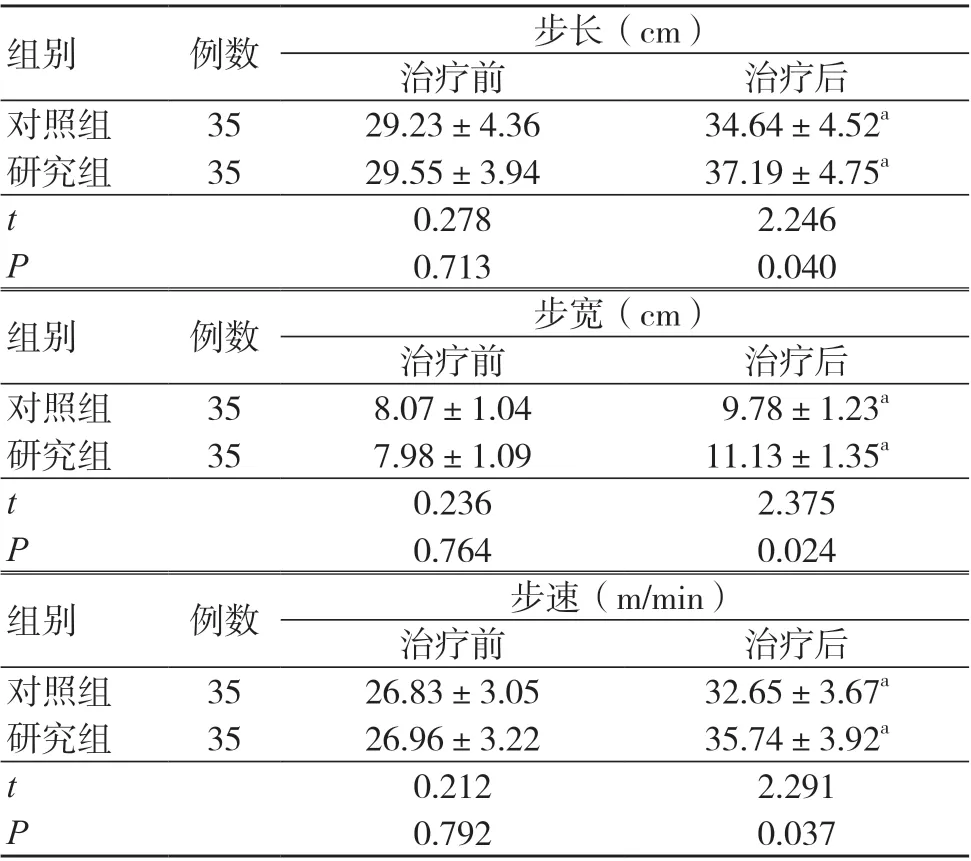
表1 两组步态参数指标比较(±s)
注:与同组治疗前比较,aP<0.05
组别 例数 步长(cm)治疗前 治疗后对照组 35 29.23±4.36 34.64±4.52a研究组 35 29.55±3.94 37.19±4.75a t 0.278 2.246 P 0.713 0.040组别 例数 步宽(cm)治疗前 治疗后对照组 35 8.07±1.04 9.78±1.23a研究组 35 7.98±1.09 11.13±1.35a t 0.236 2.375 P 0.764 0.024组别 例数 步速(m/min)治疗前 治疗后对照组 35 26.83±3.05 32.65±3.67a研究组 35 26.96±3.22 35.74±3.92a t 0.212 2.291 P 0.792 0.037
2.2 两组FMA-LE 评分和BSS 评分比较
治疗前,两组FMA-LE 评分、BSS 评分比较,差异均无统计学意义(P>0.05)。治疗后,两组FMA-LE 评分、BSS 评分均大于治疗前,且研究组大于对照组,差异有统计学意义(P<0.05),见表2。
表2 两组FMA-LE 评分和BSS 评分对比(分,±s)
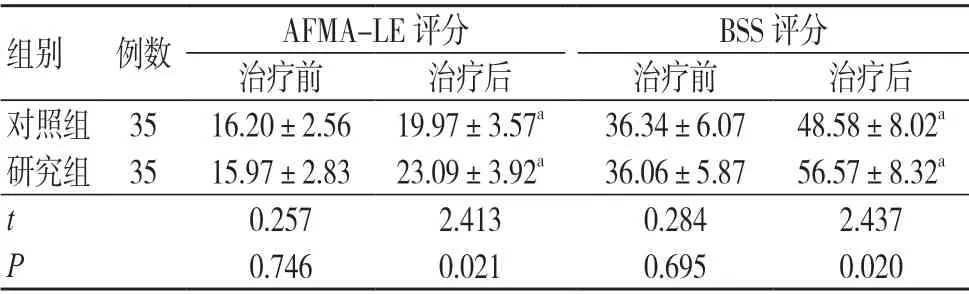
表2 两组FMA-LE 评分和BSS 评分对比(分,±s)
注:与同组治疗前比较,aP<0.05;FMA-LE 为Fugl-Meyer下肢运动功能量表,BSS 为Berg 平衡量表
组别 例数 AFMA-LE 评分 BSS 评分治疗前 治疗后 治疗前 治疗后对照组 35 16.20±2.56 19.97±3.57a 36.34±6.07 48.58±8.02a研究组 35 15.97±2.83 23.09±3.92a 36.06±5.87 56.57±8.32a t 0.257 2.413 0.284 2.437 P 0.746 0.021 0.695 0.020
2.3 两组10 m MWS 和FAC 评分比较
治疗前,两组10 m MWS 和FAC 评分比较,差异均无统计学意义(P>0.05)。治疗后,两组10 m MWS 和FAC 评分均大于治疗前,且研究组大于对照组,差异有统计学意义(P<0.05),见表3。
表3 两组MWS 和FAC 评分比较(±s)
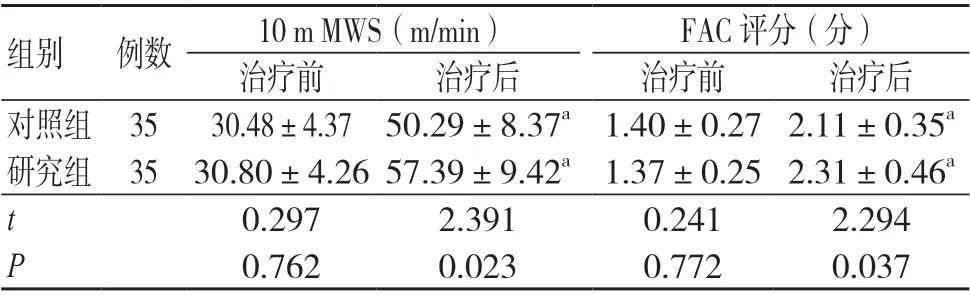
表3 两组MWS 和FAC 评分比较(±s)
注:与同组治疗前比较,aP<0.05;10 m MWS 为10 m 最大步行速度,FAC 为Holden 功能性步行分级法
组别 例数 10 m MWS(m/min) FAC 评分(分)治疗前 治疗后 治疗前 治疗后对照组 35 30.48±4.37 50.29±8.37a 1.40±0.27 2.11±0.35a研究组 35 30.80±4.26 57.39±9.42a 1.37±0.25 2.31±0.46a t 0.297 2.391 0.241 2.294 P 0.762 0.023 0.772 0.037
3 讨论
偏瘫是脑梗死后常见的后遗症,主要是由于脑梗死引起上运动神经元受损,对肢体运动的控制力下降,使被抑制的运动反射释放,干扰正常运动信号的传导,难以将负重、平衡和步行3 要素有机地结合,出现运动模式异常,常出现踝内翻、足下垂和髋外展外旋的划圈步态,使得下肢难以正常负重,影响其平衡和步行功能[6-7]。以往临床常通过步态训练等来纠正脑梗死后患者的划圈样异常步态,虽能在一定程度上帮助患者正常站立或提高行走的稳定性,但不能提供准确的感觉反馈,难以纠正异常步态,且患者对步态训练的步幅、步速难以掌握,需依靠人工辅助,会耗费辅助人员大量体力,因此,积极寻求安全有效的康复手段是临床的迫切需要[8-9]。
下肢康复机器人通过让患者进行定时、定量、不断重复的规范化和系统化练习,形成参数化训练,不仅可达到降低医务人员工作强度及提高患者康复主动性的目的,而且可使训练更有一致性和持续性,从而提升康复效果[10-11]。本研究结果显示,治疗后,两组步长、步宽、步速、FMA-LE 评分、BSS 评分、10 m MWS 和FAC 评分均大于治疗前,且研究组大于对照组,差异有统计学意义(P<0.05)。可见,下肢康复机器人用于脑梗死后偏瘫患者中不仅可改善异常步态,而且有助于下肢运动、平衡及步行功能的恢复。其原因为,下肢康复机器人通过刺激下肢关节和肌腱内的本体感受器,提高感觉信息传入,改善患侧下肢的运动感知,从而改善患肢控制能力,降低患肢肌张力,纠正异常步态[12-14];此外,下肢康复机器人将负重、平衡和步行这3 方面有机结合,从而逐渐建立正确的运动模式,有效改善下肢功能障碍和步行能力[15-16]。
总之,下肢康复机器人用于脑梗死后偏瘫患者中不仅可改善异常步态,而且有助于下肢运动、平衡及步行功能的恢复。
