“海燕”号谱系化水下滑翔机技术发展与应用
2023-03-17杨绍琼李元昊孙通帅杨亚楠王延辉
杨绍琼 ,李元昊 ,孙通帅 ,杨亚楠 ,杨 明 * ,王延辉
(1.天津大学 机械工程学院,天津,300352;2.崂山实验室 海洋观测与探测联合实验室,山东 青岛,266237)
0 引言
水下滑翔机是一种主要依靠调节“重浮力差”实现升沉,借助水动力实现水中滑翔前进的新型无人水下航行器,具有长航程、全天候、自治式的特点。水下滑翔机凭借其优势,已成为海洋长时序移动式观测与探测的重要水下平台之一,在海洋资源开发利用,海洋水文信息监测及海洋灾害预警、预测等方面发挥的作用日益凸显。水下滑翔机集成水听器、深海相机、温盐深仪、湍流仪、流速计和磁力仪等声光电磁和重力等小型低功耗传感器,可以对海洋多要素环境进行精细化的长时间连续剖面观测。天津大学研制的“海燕”系列水下滑翔机历经20 余年的研发与应用,已在工作深度、续航里程和传感集成应用等方面实现了谱系化发展。
表1 列出了“海燕”水下滑翔机从2002 年至今的主要发展历程。2002 年—2005 年,天津大学“海燕”团队研发了一种温差能水下滑翔机,并于2005 年7 月—8 月,在浙江千岛湖进行了湖上试验[1]。2009 年,“海燕”(Petrel)水下滑翔机研制成功,完成了湖上试验。2014 年,在“十二五”国家高技术研究发展计划(“863”计划)的支持下,“海燕-II”(Petrel-II)混合驱动水下滑翔机研制成功,并于2015 年在南海进行了规范化海上试验,该样机连续航行42 天,航行里程达1 108.4 km[2]。同年,浅水型水下滑翔机“海燕-200”研制成功。

表1 “海燕”谱系化水下滑翔机主要发展历程Table 1 The main development process of Petrel serialized underwater gliders
“十三五”期间,在国家重点研发计划项目的支持下,长航程水下滑翔机“海燕-L”号研制成功,经多次优化后,分别于2018 年、2019 年和2021 年进行了海上试验,试验结果多次刷新中国水下滑翔机最远航行距离纪录。2020 年7 月,“海燕-L”号在马里亚纳海沟附近布放(如图1 所示[3]),并于2021 年1 月在南海附近海域回收,这次海上试验的最远航行距离达5 506 km[3]。截至目前,“海燕-L”水下滑翔机最长续航时间已超300 天,最远航行距离超过了5 500 km。
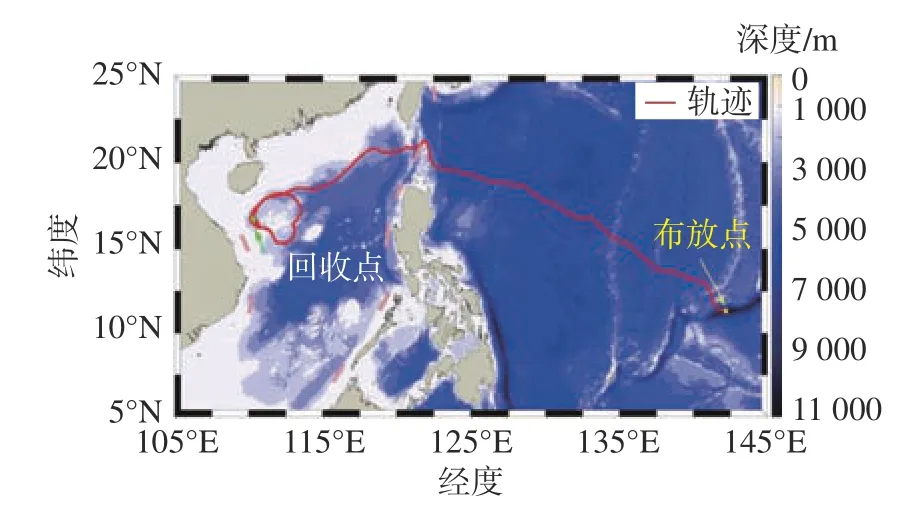
图1 “海燕-L”航行轨迹Fig.1 Navigation trajectory of Petrel-L
天津大学依托青岛海洋科学与技术试点国家实验室,先后研制了“海燕-4000”、“海燕-X”两型大深度水下滑翔机。其中,潜深4 000 m 级水下滑翔机“海燕-4000”于2017年开始研制,分别在2018 年4 月、2019 年8 月—11 月进行了海上试验;“海燕-X”万米级水下滑翔机的研制也始于2017年,分别于2018 年4 月、2020 年7 月在马里亚纳海沟附近完成了海上试验,其中最大下潜深度达10 619 m,打破并保持着水下滑翔机最大下潜工作深度世界纪录[4]。
“海燕”系列水下滑翔机可以满足远距离、长时间、多潜深的深海观测与探测应用需求,推动并引领了中国水下滑翔机技术的发展。在研发试验过程中,天津大学深海智能装备“海燕”团队不断攻关技术难题,积极共享水下滑翔机总体设计、浮力驱动、能源动力、协同组网以及海上试验应用等关键技术成果与经验,为我国无人水下航行器技术的快速发展提供了参考。
1 总体设计
水下滑翔机一般由多个部分组成,包括姿态调整装置、浮力系统装置、控制中心、耐压舱、传感器、电池包、天线以及整机外形(包括机翼与尾翼)等,如图2 所示[3]。其中,耐压舱负责承受水体压力,用来保护不能暴露在水体下的重要组件,如部分浮力驱动系统零件、控制器和电池包等;耐压舱外的组件则完全浸入水体中,如油囊和传感器等。水下滑翔机通常以下潜—上浮为1 个工作周期,进行海洋观测和探测任务。浮力驱动系统位于耐压舱段内,其自身的泵阀等系统部件协同工作,将系统内部液压油推入“外油囊”以实现自身体积膨胀,增加水下滑翔机整机浮力实现上浮,反之下沉。圆柱形耐压舱壁、整流罩、机翼、尾翼和天线是水下滑翔机整机水动力外形的重要组成部分,直接承受着水下滑翔机航行运动时的流体力。而机翼可以为水下滑翔机在下潜、上浮过程中提供升力从而使其向前行进。耐压舱内的姿态调整单元可以通过控制电池包的移动和旋转来改变水下滑翔机的重浮心相对位置,从而实现水下滑翔机的转弯等机动动作。天线负责水下滑翔机的海上指令和数据传输等通信动作。
水下滑翔机总体设计阶段一般根据设计需求,考虑其工作任务和工作环境(如工作深度、续航里程和任务需要采集的信息等)来决定其各种组件的体量、类型及材料等,即每个分系统的具体参数。
1.1 水动力外形设计
水下滑翔机的水动力外形是决定其滑翔速度、滑翔效率、转弯机动性和航向稳定性的关键因素之一[5],各种性能之间相互耦合。目前,关于水下滑翔机外形的研究主要有: 1) 基于仿生技术的水动力外形设计,包括外形仿生和运动模式仿生;2) 水动力外形设计优化,包括近似模型构建和目标函数寻优。
一般地,螺旋桨驱动的水下滑翔机依然属于欠驱动系统,其水下大范围精细化的观测与探测能力及其航行性能仍有待进一步提升。海洋环境动力场、海洋生物附着类别和海底地形地貌复杂多变,对开展观测与探测的无人水下航行器装备在海洋环境自适应能力、变航行状态能力和高机动航行能力等方面提出了更高的要求。Sun 等[5]以提升混合驱动水下滑翔机机动能力及航行性能为目标,提出了一种新型二自由度多模式可变翼机构,成功将座头鲸胸鳍的收展、扑动等运动融入混合驱动水下滑翔机,有效提升了其航行性能并拓宽了其适用的作业水域,如图3(a)所示[5]。针对水动力非线性和强耦合性的特点,采用粒子图像测速法、力学监测及试验仿真手段,开展了机翼参数、机构姿态角度对机翼的推进力、侧向力及升力的影响关系研究,得到了机翼扑动频率、振幅与水动力的映射函数,为多模式水下航行器海上试验工程样机研制与运动控制提供了理论支撑。Zhu等[6]提出了一种具有类“蝠鲼”仿生翼的水下滑翔机,其仿生翼由驱动系统和主翼(包括“基翼”和“远翼”)组成,在推进模式工作时,该水下滑翔机通过驱动由碳纤维板和柔性铰链组成的“远翼”来提供主要推力。受雨燕改变翅膀后掠角实现滑翔和俯冲2 种飞行模式的启发,Wang 等[7]提出了一种用于水下滑翔机的预设机翼后掠角策略,提升了“海燕”水下滑翔机在不同滑翔条件下的滑翔性能,如图3(b)所示。采用优化拉丁超立方抽样(latin hypercube sampling,LHS)与计算流体动力学(computational fluid dynamics,CFD)方法,建立了用于描述水下滑翔机水动力系数与机翼后掠角等设计参数之间关系的近似模型,借助动力学模型分析了机翼后掠角对水下滑翔机续航、转弯和滑翔效率等性能的影响。
除外形结构和运动模式仿生之外,水下滑翔机外形主体、机翼、附体等耦合设计参数的优化也是提升其运动性能的重要研究方向。Yang 等[8]提出了一种基于近似模型技术的水下滑翔机水动力外形优化方法(如图3(c)所示),该方法综合考虑水下滑翔机主体线型和附体机翼尺寸之间的复杂耦合关系,基于水动力系数近似模型,研究了各个水动力系数与设计参数之间的关系,并以阻力系数最小化和单位能耗航程最大为目标,完成了主体和机翼尺寸优化。结果表明,当客栈载荷(hotel loads,包括控制系统和传感器等与水下滑翔机系统工作时间相关部件的功率)约为0.5 W,俯仰角为±12°时,采用经过优化后水动力外形的“海燕-L”长航程水下滑翔机续航里程可提升约7.64%。Sun 等[9]通过对座头鲸等生物体型特征的分析和建模,提出了一种用于水下航行器的低阻仿生非回转主体外形(如图3(d)所示),给出了该类外形的数学描述方程。通过构建主体的阻力特性与外形各个特征参数的响应面近似模型,以相同排水体积和整体长度为约束,完成仿生非回转低阻外形的参数优化设计,并开展了其缩比模型的拖曳水池试验,上述优化结果均经充分验证。针对水下航行器的快速设计和功能多样化问题,Liu 等[10]基于谱系分类理论建立了包括球形、细长轴对称、细长扁平和圆碟形的主体形状谱系,采用CFD 仿真方法,研究了主体形状参数和雷诺数对球形状、细长轴对称形状和细长扁平形状流体动力学的影响。通过对CFD计算得到的数据进行拟合,建立了不同形状参数和雷诺数的主体形状谱系阻力系数的数学模型,为后续水下航行器的主体外形选择提供了参考。
水下滑翔机在变速运动时,推动它的力不仅要为增加其动能做功,还要为增加其周围流体的动能做功,这一部分流体的质量称为水下滑翔机的附加质量。张连洪等[11]提出了一种水下滑翔机通用附加质量求解方法,极大地提高了附加质量求解效率,对不同型号水下滑翔机的水动力外形设计和动力学建模都具有重要参考价值。
水下滑翔机的水动力外形也会影响其转弯运动形式。Yang 等[12]通过引入不同外形的水动力系数近似模型,建立了包含机翼位置和尾舵面积2 个设计变量的“海燕”长航程水下滑翔机六自由度动力学模型。在其动力学模型的基础上,对转向机动性能进行了分析,总结了机翼位置和尾舵面积对水下滑翔机螺旋运动模式的影响。分析结果表明,通过调整机翼位置和尾舵面积,可以实现水下滑翔机在正螺旋和反螺旋模式下的螺旋运动,其中正螺旋模式具有更高的滑翔稳定性。
1.2 耐压主体单元设计
耐压主体单元即耐压壳体作为水下滑翔机的关键承压部件,不仅为舱内提供了一个干燥密闭的环境,还对整机的续航能力产生影响,具体表现为: 1) 耐压壳体的材料、尺寸和结构形式等决定了其所能提供的净浮力,影响能源带载量;2) 耐压壳体在热力耦合作用下的体积变形量会影响浮力驱动单元的油量体积调节,进而影响整机能耗。因此,耐压壳体设计的优劣直接影响着整机的能源带载量和航行经济性。近年来,关于耐压壳体优化设计方面的研究受到了很多学者的关注,主要包括壳体形式选择、结构尺寸优化、选材加工等,其中大部分研究工作以研制轻量化、大变形量的耐压壳体为目标。
Yang 等[13]设计了一种可以提供近似中性浮力的多相交球体(multiple intersecting spheres,MIS)形式的耐压壳体,利用薄壳理论建立了壳体的静力学模型,并在此基础上结合惩罚函数法和多种群遗传算法,以重排比最小为目标,对壳体球面厚度、球面与肋骨交角等参数进行了优化,采用有限元分析和压力试验验证了力学模型的有效性。Wang 等[14]通过分析总结“海燕”水下滑翔机现有耐压壳体的设计和测试结果,基于刚度分配方法提出了一种具有非均匀弓形肋的圆柱壳体(nonuniform arch ribs cylindrical,NARC),基于响应面法建立了壳体质量、压缩率和最大等效应力等的近似模型,以壳体质量最小和压缩率最大为优化目标,完成了壳体壁厚、肋骨高度及宽度等关键设计变量的优化设计。Yang 等[15]在传统环肋圆柱壳的基础上,提出了一种具有外形光滑、压缩性大、重排比小等优点的新型环肋拱形圆柱面壳体(ringstiffened arched cylindrical,RAC),为了提升壳体优化设计效率,其在有限元模拟的基础上提出了一种基于数据驱动的不规则结构压力壳体的有效设计方法,并详细介绍了其框架。为了突破万米深渊极端压力环境挑战,Wang 等[4]采用碳化硅陶瓷材料制备了“海燕-XPLUS”深渊滑翔机[16]耐压壳体,其针对陶瓷耐压壳体最常见的管端开裂失效问题,开展了理论分析、仿真计算和试验验证研究,提出了一种近似校核方法,并给出了经验性的安全系数建议。图4 为几种耐压壳体水动力外型设计图,各种壳体性能见表2。

表2 新型水下滑翔机不同壳体性能对比Table 2 Performance comparison of four underwater glider shells
水下滑翔机水动力外形设计和耐压壳体设计参数之间相互耦合,例如壳体圆柱段的直径和外径尺寸参数同时影响其水动力性能和壳体的重排比和压缩性。Wang 等[17]基于水下滑翔机的续航里程模型,采用将协同优化(collaborative optimization,CO)方法和近似模型技术相结合的多学科设计优化(multidisciplinary design optimization,MDO)设计框架,完成了对壳体重排比、压缩性、水动力系数和运动参数等关键参数的协同优化,并开展了海上试验验证。结果表明,当客栈负载为0.5 W时,优化工作可以提升“海燕”长航程水下滑翔机约83.3% 的续航里程。此外,水下滑翔机系统设计优化涉及多个子系统,如耐压壳体、水动力外形、控制导航、能源带载等,这些系统相互耦合并影响着水下滑翔机的续航能力。与传统的优化方法相比较,多学科设计优化为涉及交叉学科的复杂工程问题提供了一种更有效的方法。Yang 等[18]通过系统分析,建立了“海燕”长航程水下滑翔机的通用学科框架,包括流体力学、结构力学、机器人动力学及液压传动等。在学科耦合分析之后,提出了一种基于并行子空间优化、惩罚函数法和多种群遗传算法相结合的水下滑翔机系统设计优化方法,可以满足水下滑翔机在不同观测任务中的多样化设计要求,最后通过海上试验对设计结果进行了验证。海上试验回收现场如图5 所示。

图5 多学科优化后的“海燕-L”长航程水下滑翔机海上试验回收现场Fig.5 Sea trial recovery scene of Petrel-L long-rangevoyage underwater glider after multidisciplinary optimization
2 浮力驱动技术
浮力驱动系统作为水下滑翔机的“心脏”,是一套机、电、液耦合的液压驱动与体积调整系统,其可靠性与可工作深度将直接决定水下滑翔机的可靠性与运行深度等级。同时,水下滑翔机的航速、航程以及机动性等方面均不同程度地受到其浮力驱动系统性能的影响。目前,“海燕”水下滑翔机一般采用可变体积式浮力驱动系统,通过改变外皮囊体积实现其净浮力的调节。经过逾20 年的发展,“海燕”水下滑翔机浮力驱动系统在全海深高效稳定浮力调节、多样化被动浮力调节方法与主动浮力调节策略的研究上均取得进展。
为了满足全海深观测与探测需求,“海燕”团队研制了能够满足不同任务工作深度浮力调节需求的多型号浮力驱动系统。在1 000 m/1 500 m级浮力驱动系统研发中,Wang 等[19]利用AMESim软件对浮力驱动系统双级液压泵驱动过程进行了性能仿真分析,并通过试验验证了仿真结果的有效性,降低了浮力驱动系统的研发成本,该系统原理见图6。
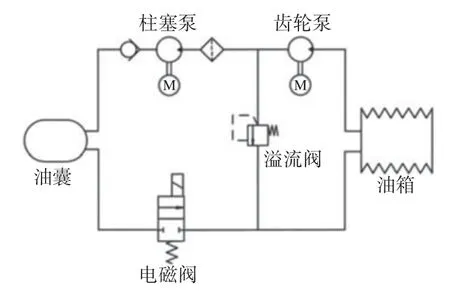
图6 水下滑翔机双级液压泵浮力驱动系统原理图Fig.6 Schematic diagram of an underwater glider twostage hydraulic pump buoyancy drive system
为了满足4 000 m 级水下滑翔机的需要,Liang等[20]在双级液压泵驱动式浮力驱动系统基础上,使用了硅油补偿液作为辅助,并充分考虑硅油补偿液的热特性,实现了对其净浮力的精确预测,并结合水下滑翔机动力学模型与能耗模型,进一步分析了补偿液对水下滑翔机姿态稳定性和节能性等方面的影响。
为了实现万米深渊极端环境下的可靠浮力驱动,Wang 等[21]提出了一种综合了双浮力驱动系统主动浮力调节与硅油补偿液被动浮力调节的方案,实现了自适应浮力调节,并经过马里亚纳海沟的海上试验,验证了该浮力驱动系统在极端环境下的工作能力,该系统实物图见图7。

图7 “海燕-X”水下滑翔机浮力驱动系统实物图Fig.7 Physical drawing of Petrel-X underwater glider buoyancy drive system
在水下滑翔机运行过程中,由于环境参数的变化,其净浮力实际处于实时改变状态(下潜和上浮过程均减小,通常将此现象称为浮力损失)。这要求水下滑翔机具有更为多样化的被动浮力调节方法,以及更加灵活的运行策略。4 000 m 和万米级浮力驱动系统中使用的硅油补偿液,即为一种有效的无能耗被动浮力调节方法。由于其自发的浮力调节效果刚好与环境参数变化导致的水下滑翔机净浮力变化方向相反,所以,被动式浮力调节过程常被称为浮力补偿,其本质是一种有规律的自适应浮力调节过程。鉴于单一的浮力补偿装置难以达到预期的浮力补偿效果,Xie 等[22]综合了弹簧式蓄能器、充气式蓄能器以及硅油补偿液等补偿方法,提出了一种新型混合被动浮力补偿系统(如图8 所示),建立了浮力调节数学模型,并使用遗传算法与禁忌搜索算法对设计参数进行了优化。研究结果表明,新型混合被动浮力补偿系统的使用对减小水下滑翔机运行过程中的净浮力变化、提高其运动稳定性及能量利用效率等方面效果显著。另外,受鱼鳔结构的启发,Liang 等[23]提出了一种新型类鱼鳔的二级浮力驱动系统,在水下滑翔机浮力驱动系统中使用2 个不同的预充压力充气式蓄能器进行了被动浮力调节,并在建立水下滑翔机环境模型、净浮力模型和动力学模型的基础上,使用遗传算法对蓄能器设计参数及安装位置进行优化,在50~950 m 深度范围内,水下滑翔机实际俯仰角与目标俯仰角偏差不超过2°,下潜过程的垂直速度最大变化量为0.041 m/s,有效提高了水下滑翔机的姿态稳定性和速度稳定性,该系统如图9 所示。在浮力驱动系统运行控制策略的研究方面,严升等[24]对水下滑翔机纵垂面运行中变浮力过程进行了建模,并且优化了其控制策略,结合南海实际海上试验数据,验证了模型的有效性,并采用比例积分微分(proportional-integral-derivative,PID)控制进行了数值仿真,结果表明,优化后的控制策略方案可以显著提高水下滑翔机的运动性能。Yang 等[25]提出了一种协同控制外皮囊体积与电池包位置的浮力补偿新方法,通过在水下多次进行主动浮力调节,有效降低了水下滑翔机的净浮力变化及其带来的运动稳定性方面的负面影响。为了进一步提高能量利用效率,Yang等[26]将水下滑翔机运行深度等分为5 段,通过建立水下滑翔机续航里程模型的代理模型,对不同客栈负载下的最优控制参数进行了优化。优化结果表明,当客栈负载为0.5 W 时,水下滑翔机的续航里程提高约10.47%。
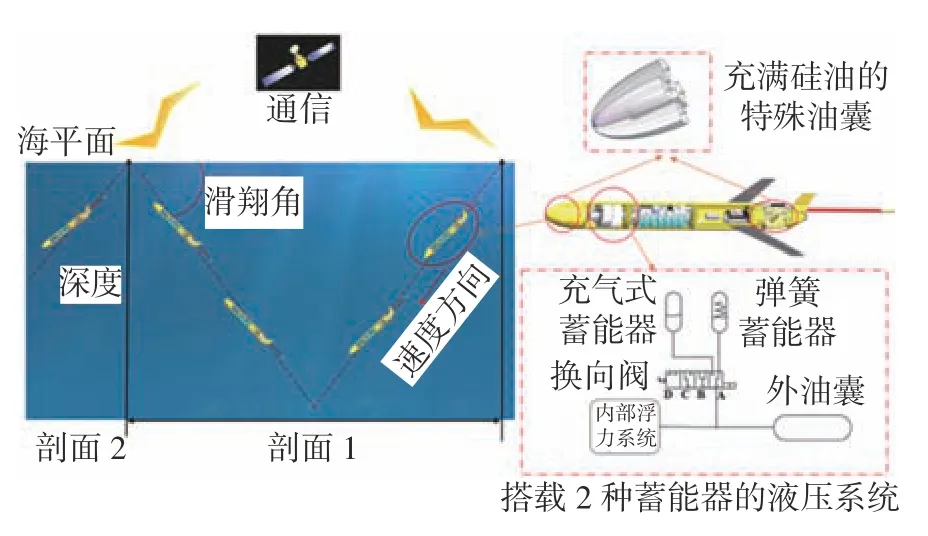
图8 “海燕”水下滑翔机混合被动浮力补偿系统Fig.8 Hybrid passive buoyancy compensation system of Petrel
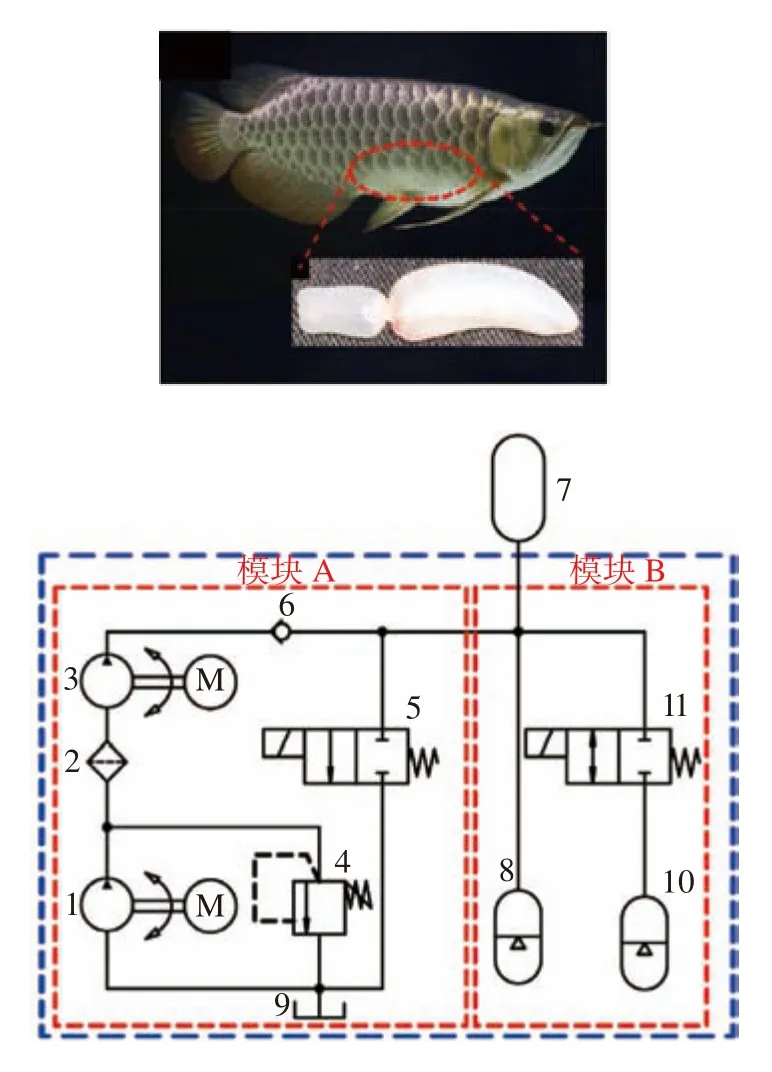
图9 鱼鳔及类鱼鳔二级浮力驱动系统Fig.9 Fish bladder and Fish-bladder-like buoyancy drive system
3 能源动力技术
3.1 能耗预测与运动精度控制
能源动力技术是水下滑翔机实现远续航、长在位作业时间的主要手段,亦是保障水下滑翔机航行安全的基础。经过20 余年的发展,“海燕”团队在水下滑翔机能耗预测与优化、可再生能源利用和新型动力系统设计与升级等方面取得了长足进展。
1) 针对能耗预测与优化问题,Song 等[27]基于水下滑翔机动力学模型及其工作流程提出了纵平面能耗模型,并进一步推导出续航里程模型,其中能耗模型误差仅为2.68%,处于行业先进水平。上述模型揭示了水下滑翔机水动力系数、运动参数、控制参数与能耗和航程之间的关系;并通过Sobol方法,辨识出影响水下滑翔机能耗和航程的关键参数,以指导优化优先级;最后,通过关键参数优化,提升了水下滑翔机能源效率。为了进一步探究海洋环境中水下滑翔机的能耗,Song 等[28]基于上述研究,结合拉格朗日动力学方程和海洋深平均流推演方法,建立了包含海水密度梯度和计及洋流的能耗模型,海上试验数据表明,该能耗模型可以有效地实现海洋环境中水下滑翔机能耗的预测;仿真分析进一步揭示了海洋环境中水下滑翔机运动参数和深平均流与能耗的关系,可以为任务规划与优化提供指导。另外,水下滑翔机姿态调节能耗易受海洋环境影响,且传统的能耗模型难以考虑水下滑翔机运动特性,为了解决上述问题,Song 等[29]采用最小二乘支持向量机(least squares support vector machine,LSSVM)方法并结合粒子群优化(particle swarm optimization,PSO)算法,建立了基于数据驱动的水下滑翔机能耗模型—LSSVM-PSO 模型。通过与实际海上试验数据的对比,探究了基于不同核函数的模型性能,并充分讨论了LSSVM-PSO 模型与传统代数模型的差异,确定了最优训练样本数量,结合代数模型与LSSVMPSO 的优点,提出了混合能耗模型概念。该研究为水下滑翔机能耗预测提供了新途径,使水下滑翔机智能化程度得到进一步提升。
2) 运动精度是水下滑翔机另一重要性能指标。水下滑翔机作为在深远海复杂环境中运行的长期观测与探测平台,监测其运动状态可以实时调整运行参数和及时诊断故障,对提高任务效率、节省能源和降低成本尤为重要。Yang 等[30]提出了一种新型的水下滑翔机运动监测方法,利用大量动力学模型的历史数据集训练和测试深度学习网络,并结合多目标优化问题,分析参数的变化趋势,以监测水下滑翔机三维运动状态。研究结果表明,在正常运行状态下,该方法识别的可变参数可以用于实时优化调整运行参数以提高水下滑翔机滑翔效率和运动精度。水下滑翔机在长时间运行时,生物污损是影响其运动精度和单剖面运行时间的重要因素,而如何应对生物污损一直是长航程水下滑翔机的研制难点。针对此问题,王延辉等[31]基于数据驱动提出了一种检测水下滑翔机生物污损的方法,采用机器学习方法,根据已有大量未发生生物污损的关键数据建立了水下滑翔机单剖面运行时间预测模型,利用其单剖面运行时间预测偏差,快速获取水下滑翔机在海上运行过程中的性能变化,并指导海上试验过程中控制参数制定和任务规划;同时,该方法也为生物污损影响下的水下滑翔机运动精度和能耗预测研究提供了技术支撑。水下滑翔机运动精度与能耗之间存在一定耦合关系,针对此,Wu 等[32]结合水下滑翔机动力学模型与弗罗贝尼乌斯(Frobenius)范数,提出了考虑非均匀水流的水下滑翔机运动轨迹精度定量评价方法;利用试验设计方法和数值仿真模型获取样本点,基于径向基函数(radial basis function,RBF)神经网络建立了以其控制参数为输入,用于快速计算运动精度和能耗的高精度代理模型;进一步结合代理模型与第二代非劣排序遗传算法(non-dominated sorting genetic algorithm-II,NSGAII)开展多目标优化计算,确定能够同时保证水下滑翔机高运动精度和低能耗的控制参数值,得到了帕累托最优解集。研究结果表明,其能耗与运动精度存在一定矛盾关系,所提出的研究方法为水下滑翔机综合性能优化提供了理论指导,并提升了水下滑翔机在实际海上试验应用中的作业质量。
3.2 温差能源捕获与利用
目前,多数水下滑翔机依靠自身携带的电池包供给负载等所需能量。因其装载的电池能量存在上限,水下滑翔机的续航能力和自持力受到制约,尚无法满足未来深远海全天候长期观测与探测任务的需求。特别是我国“走向深蓝”重大战略部署的实施对国产水下滑翔机的自持力提出了更高要求。例如,当前“海燕”水下滑翔机的续航力超5 000 km、自持力300 d,但与1~2 年长期在位观测与探测需求仍存在显著差距。
水下滑翔机每进行一次下潜和上浮运动,浮力驱动系统工作2 次,需要消耗大量的能量,特别是在大深度浮力驱动系统中尤为明显。利用海洋热能(温差能)等环境能源实现浮力驱动能源多样化,为解决水下滑翔机长续航需求与有限的能源携带量之间的矛盾提供了可能。王树新等[33-34]设计开发了温差能浮力驱动系统及温差能水下滑翔机原理样机,在水域试验中完成了25 次剖面运动,热交换功率可达47 W,满足了水下滑翔机对浮力驱动系统的要求,验证了温差能浮力驱动系统的可行性。在“十二五”国家“863”计划项目支持下,Yang 等[35]开发了搭载有温差能-电能复合动力的浮力驱动系统的温差能驱动水下滑翔机(Petrel Thermal),可以在温差能不稳定时使用电能作为驱动能源,提高了系统的稳定性与环境适应性,其浮力驱动系统示意图见图10。海上试验中,搭载该浮力驱动系统的水下滑翔机连续运行677 km,运行剖面112 个,运行时间为29 d,验证了浮力驱动系统的有效性。Petrel Thermal 水下滑翔机是我国迄今唯一使用自然能源实现水下长航程观测与探测任务的无人航行器,能耗经济性相较电能水下滑翔机提升约20%,运输经济性提升约33%[36]。为了进一步扩大温差能在水下滑翔机中的应用,“十三五”期间,“海燕”团队还开展了温差能相变发电技术的研究,Wang 等[37]研究了热电转换技术,通过建立能量转换过程综合效率模型,对液压油、液压马达及发电机等的参数进行了优化,海上试验结果表明,平台单剖面发电量达1.86 Wh,转换效率约0.396%。至今,温差能相变驱动、发电涉及的相变介质隔离、紧凑化设计、集成匹配等关键技术已获突破,但样机性能与理论期望指标仍存在差距,还需开展进一步研究,该系统工作原理见图11。
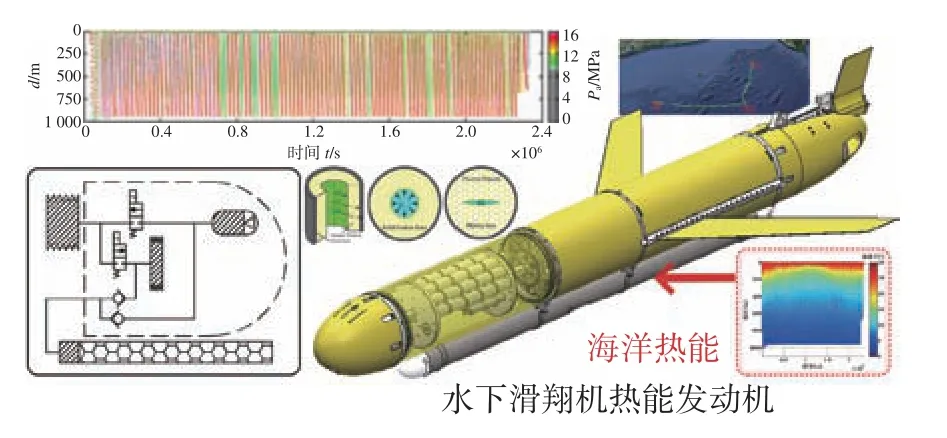
图10 温差能水下滑翔机及其浮力驱动系统Fig.10 Thermal energy underwater glider and its buoyancy drive system
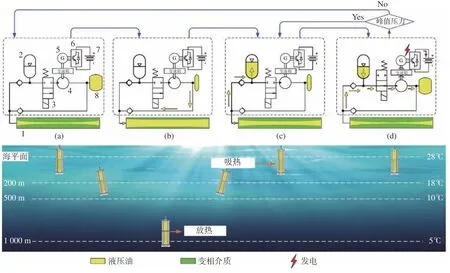
图11 热电转换浮力驱动系统工作原理Fig.11 Working principle of the thermoelectric conversion buoyancy drive system
Wang 等[38]还提出水下滑翔机在往复多次穿越冷、热水层的过程中,可以借助固-液相变材料的热胀冷缩特性实现海洋温差能捕获,进而破解水下滑翔机长期能源供给难题。该技术途径对提高水下滑翔机“能量自给”水平具有重要价值。图12 为海洋温差能固-液相变工作原理。
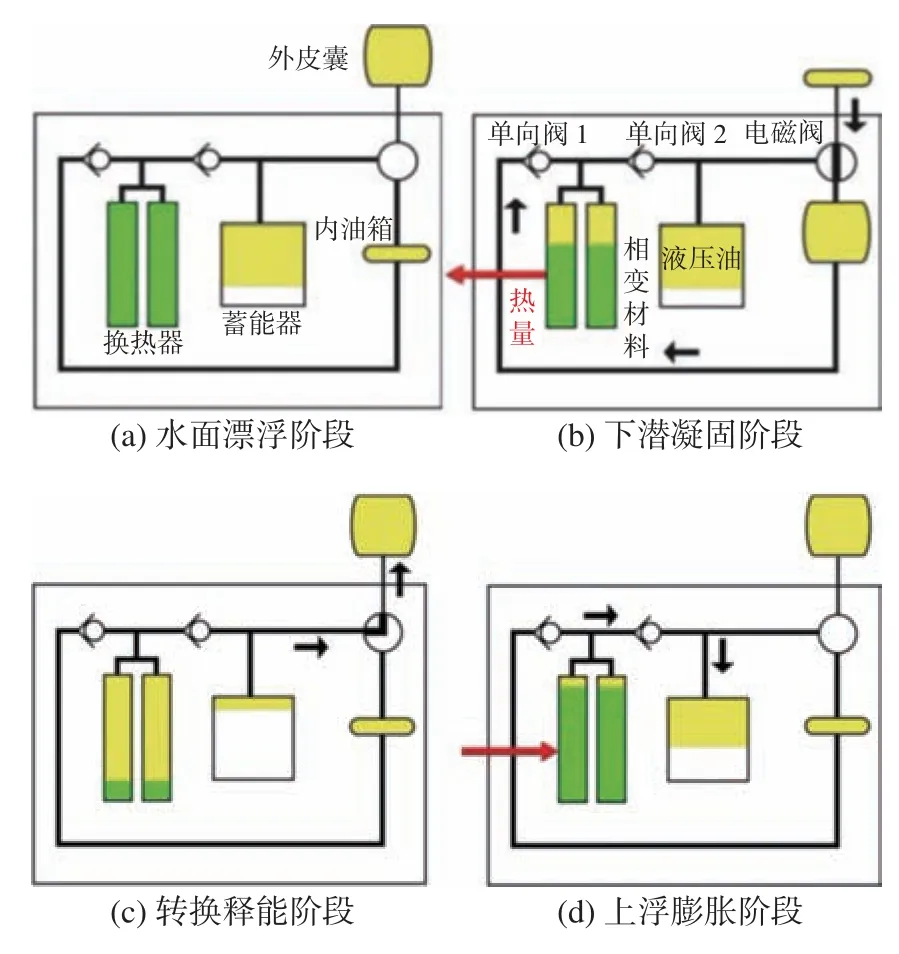
图12 海洋温差能固-液相变工作原理图Fig.12 Working principle of the solid-liquid phase change of ocean thermal energy
固-液相变换热器是一种可以实现温差能捕获利用的关键装置。多年来,针对宏观固-液相变换热过程、微观材料固-液相变机理等领域的理论研究不断深入。Zhang 等[39]基于焓法模型建立了固-液相变传热数学模型,基于相变液相分数场分布提出了体积变化量计算方法,研究成果对换热器相变过程预测具有指导作用。此外,“海燕”团队还在焓法相变模型基础上引入压力项因子,进一步修正了模型的准确性,同时实现相变传热过程与液压蓄能过程间的解耦,提出了固-液相变过程转换能量计算方法;采用分子动力学方法系统性地揭示了压力对温差固-液相变材料密度、相变温度、导热率、相变潜热以及比热容等热物理性质的影响,首次研究了高压条件下添加石墨烯结构的相变材料增强换热微观作用机理,揭示了石墨烯添加比例与相变传热速率之间的内在联系,得到了以传热速率最快为目标的石墨烯添加最优比例[40-42]。
近年来,为了破解因温差能水下滑翔机总体系统庞杂而导致的研发难度大、成本高,且与同期电池驱动水下滑翔机相比技术成熟度差距较大的难题,“海燕”团队还提出并发展了紧凑化的海洋温差能驱动/发电单元装置,作为模块化赋能单元提供给现有成熟水下滑翔机等无人航行器外置搭载使用[43-45]。此项技术在一定程度上避免了因加入新装置而导致水下滑翔机本体布局结构的巨大变动,降低了研发的复杂度、周期和成本,实现了海洋温差能捕获技术的快速转化应用(捕获装置如图13 所示)。目前已完成模块化的温差能驱动/发电装置研制与测试,并在水下滑翔机、深海智能浮标等无人水下航行器上进行了集成搭载使用,效果良好。其中温差能驱动水下滑翔机实现了连续无故障运行40 d,完成191 个剖面,水面距离累积续航里程达到706.4 km,实现了国产工程样机重大突破。
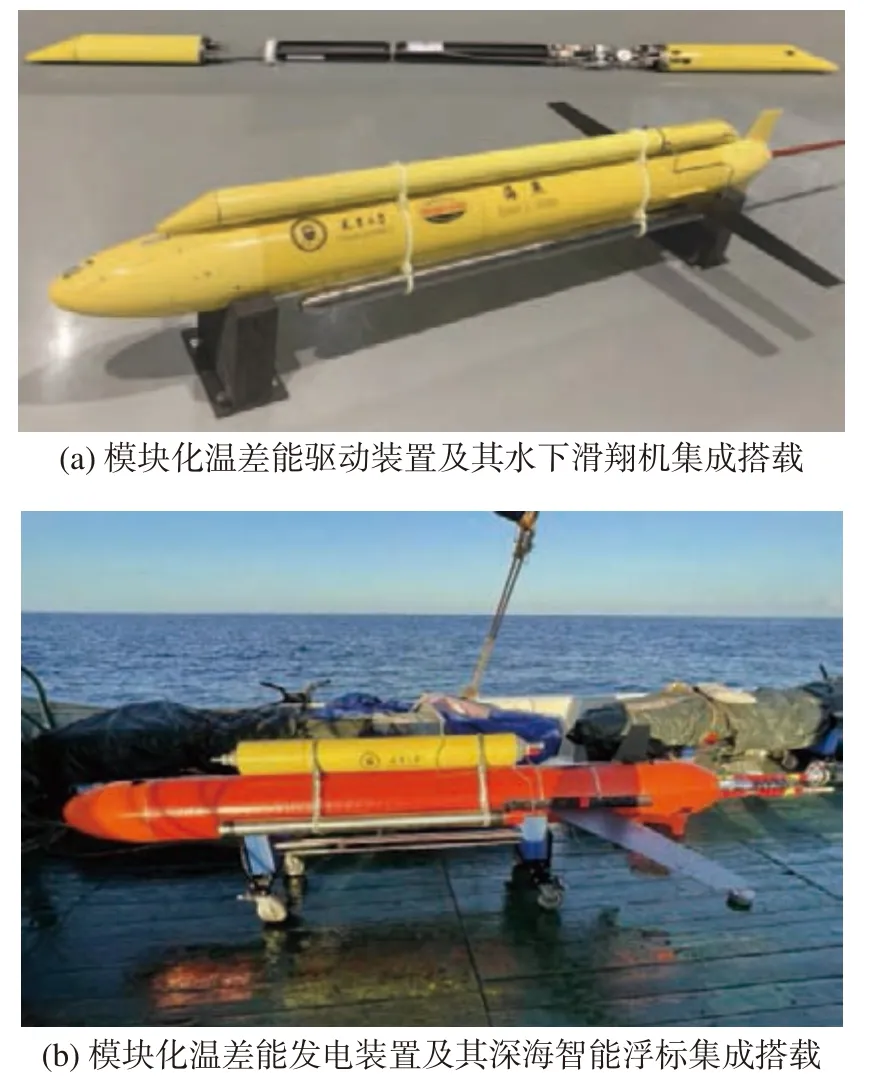
图13 水下滑翔机集成搭载模块化温差能捕获装置Fig.13 Underwater glider with integrated modular thermal energy capture device
3.3 风能捕获与利用
海表面风气流在海洋中广泛存在,利用风帆捕获风能以直接推动船舶行进是一种经典的海洋环境能源利用途径,至今已有数千年历史,具有能量转换环节少、转换方式简化等优势。近年来,随着无人驾驶、智能控帆等技术的快速发展,风帆推进技术逐步成熟,“海燕”团队也在水下滑翔机平台集成使用了相关技术[46-47],研制成功了风帆驱动水面/水下多航态航行器,其工作模式见图14。
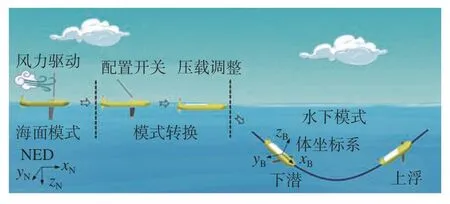
图14 风帆驱动水面/水下多航态航行器工作模式示意图Fig.14 Schematic diagram of the working mode of saildriven surface/underwater multi-mode vehicle
“十三五”期间,“海燕”团队在国内率先启动了风帆驱动双航态水下滑翔机关键技术与设计理论研究,突破了衡重特性变换、机构联动切换、风帆智能控制等关键技术,于2020 年成功研制了Petrel Dual 原理样机。该样机在水面航态利用弧形风帆捕获风能实现闭环轨迹航行(如图15 所示[46]);在水下航态时则收折起风帆,以锯齿轨迹滑翔模式完成了200 m 剖面下潜。

图15 风帆驱动多航态水下滑翔机原理样机及其水域闭环航迹图Fig.15 Principle prototype of wind-sail driven multi-mode underwater glider and its closed-loop track diagram
未来,“海燕”团队将不断提升风帆驱动双航态水下滑翔机技术成熟度,增强其深远海高海况下的耐候性与生存性,进一步明确任务场景,以持续提升风帆驱动双航态水下滑翔机新型平台的实用性。
4 组网应用技术
水下滑翔机等装备协同组网技术是目前快速发展的深海关键技术之一。针对海洋环境要素的复杂性以及时变特征,克服水下通信带来的控制延迟难点,“海燕”团队在水下滑翔机组网协同控制方面也取得了一定研究进展。
文献[48]回顾总结了潜水器组网的国内外研究进展,包括协作观测、协同组网和异构潜水器组网等,重点介绍了我国“十三五”期间相关国家重点研发计划项目的最新海上试验进展,并对相关技术发展趋势进行了展望,为后续我国无人水下航行器技术提升和海上组网应用提供了科学思路和技术优先发展方向的有益参考。
针对复杂环境下的海洋观测和探测任务,Yang等[49]提出了一种基于人工势场法的异构控制系统,其将水下航行器编队系统视为一个多体系统,利用人工势场法和凯恩方法实现了水下滑翔机编队系统的运动规划,生成水下滑翔机编队轨迹,并采用最小化原理将连续轨迹转化为离散点,实现了水下滑翔机编队系统的运动控制。为了合理规划水下滑翔机的组网布局,Xue 等[50]基于多体力学分析理论和人工势场方法,考虑海洋流场和水下滑翔机能耗模型,针对水下滑翔机自主感知、自主控制、近实时通信及其运动耦合等工作特点,提出了多层级水下滑翔机编队协同控制模型,并设计了水下滑翔机编队任务控制系统(见图16),最终通过数值分析和水域试验,证明了该任务控制系统的可行性,实现了对海洋特征的时空同步观测。

图16 水下滑翔机多层级编队协同控制系统结构Fig.16 Architecture of the multi-level formation collaborative control system of underwater glides
此外,沈新蕊等[51]基于水下滑翔机国内外发展现状,总结了其动力学与控制领域的研究成果,概述了国内外具有代表性的协作组网观测技术,并且对传感器设计集成技术、数据格式与协议以及水下滑翔机功耗优化等方面进行了综述。Li等[52]基于涡旋温度异常场的参数化模型,利用不同配置的水下滑翔机观测网采集中尺度涡三维结构信息并进行重构的能力,进行了数值仿真分析及海域试验验证,确定了协同观测网中水下滑翔机的最优数目和最佳布局结构。Li 等[53]基于“海燕-II”水下滑翔机观测平台,对面向南海北部中尺度涡三维结构观测的水下滑翔机观测网有效性进行了验证,并通过分析组网中的水下滑翔机断面观测数据,揭示了中尺度涡内位势温度、盐度及位势密度异常垂直分布特征,就涡内溶解氧、叶绿素及有色溶解有机物浓度的垂直分布进行了讨论分析,全面揭示了反气旋中尺度涡的垂直结构特征。Zhang 等[54]结合3 台“海燕”水下滑翔机在南海北部的定点观测数据,采用经验克里金(Kriging)方法重构出了该区域的深度平均流场,解释了南海北部海洋流场的时空分布特征,为后续水下滑翔机的组网路径规划与实施决策提供了数据参考。此外,Zhang 等[55]采用改进Kriging 插值方法进行了海洋动力环境场重构,考虑采样数据的离散性和非均匀特征,利用积合模型改进Kriging插值时空变异函数,根据7 台“海燕”水下滑翔机编队组网观测资料,重构了三维温盐场和特征面,揭示了南海北部水团温盐流场结构特征。针对异构海洋滑翔机编队及变换问题,Ma 等[56]提出了一种基于离散信息并采用一致性算法的异构多滑翔机编队控制新算法,建立了其非线性离散水下滑翔机动力学模型,采用前向速度控制和纵向路径跟踪相结合的方法设计了无法直接获得速度信息的异步通信编队控制协议,并得到了网络系统稳定的充分条件。在水下滑翔机组网稳定性方面,张润锋等[57]对强扰动环境下组网构型稳定性进行了分析,考虑水下滑翔机组网队形动态变化,提出了基于复杂网络理论的稳定性评估方法,之后采用领导-跟随者法建立了有无扰动下的运动学模型,并对编队构型稳定性进行分析仿真,验证了不同编队构型的稳定性,为水下滑翔机规模化组网提供了理论支撑。
5 海上试验应用
5.1 传感集成应用
水下滑翔机作为一种新型海洋观测与探测平台,以海洋现象观测和目标探测为目的,需要搭配相应的任务传感器,同时集成的任务传感器还需要保证水下滑翔机低能耗、长续航等的观测与探测能力要求。因此,需要在水下滑翔机的体积、质量和能耗等方面进行适应性集成和改进。目前,如湍流传感器、水听器、深海相机、电磁海流计(electromagnetic current,EMC)、温盐深仪(conductivity-temperature-depth,CTD)、多波束测深探测仪及全球定位系统(global positioning system,GPS)等多种传感器已经在“海燕”号谱系化水下滑翔机上实现了集成应用。图17 为集成有湍流传感器、EMC 和CTD 的“海燕-L”水下滑翔机。

图17 “海燕-L”长航程水下滑翔机Fig.17 Petrel-L long-range underwater glider
2013 年,Wang 等[58]基于天津大学与中海油田服务股份有限公司合作开发的一艘深海自主式潜水器平台相关任务传感器观测数据的对比,得出了TUCOS-I 型自主水下航行器的测量误差来源。其传感器的分布如图18 所示,包括SBE49 型号的CTD、EM 2040(M)型号的多波束测深系统、超短基线(ultra short base line,USBL)应答器、导航定位系统(navigation and positioning system,NPS)。建立的估计模型,为该水下航行器多波束测量误差分析提供了一种简单可行的方法。这些工作对多波束测深探测仪系统的集成和提高测量精度给予一定的指导意义。
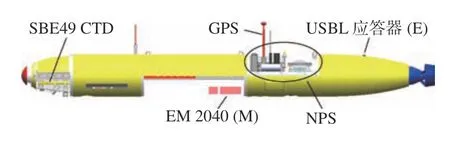
图18 TUCOS-I 型自主水下航行器传感器分布Fig.18 Sensors distribution of the TUCOS-I autonomous undersea vehicle
Li 等[59]开发了一款集成有水质监测传感器的混合驱动水下滑翔机“海燕-II”,并于2014 年7 月在丹江口水库进行了应用试验。该水下滑翔机携带水质监测传感器,运行平稳,为国家“南水北调”工程应急水质监测提供了先进平台技术支持。
自由落体微结构剖面仪(free-fall micro-structure profilers,FFMP)是测量海洋湍流微结构的有效平台之一。“海燕”团队成功开发了FFMP1000 湍流剖面仪,其前端集成有微结构轮廓仪、剪切力传感器、CTD 以及压力传感器等。Liu 等[60]通过采用流固耦合仿真和实船海上试验,对FFMP 的振动特性和机理进行了研究,利用FFMP1000 型湍流剖面仪在黄海海域进行了海上试验,发现FFMP1000在自由下落过程中存在一个0.14°小角度的复摆振荡,并对于给定的船体形状,以运动惯量、恢复力矩和下降速度为自变量,推导了预测船体振动频率和振动加速度幅值的经验公式。该公式可方便、有效地预测FFMP 的振动频率和加速度,甚至可以在初步设计阶段计算FFMP 的低端检测限,进而为改进FFMP 的设计提供指导,具有集成于水下滑翔机等深海装备平台的应用前景。
Ma 等[61]通过在水下滑翔机上集成电磁速度传感器,优化电磁式速度传感器布置位置和距离,得到了能更准确地反映水下滑翔机动力学行为的水动力参数。在2016 年8 月—2017 年9 月,集成有EVS(enhanced vision system)、GPCTD(glider payload CTD)、TCM 3 型数字罗盘的“海燕-II”水下滑翔机在中国南海进行了海上试验,共完成了156 次下潜,最深达1 000 m。针对不同俯仰角,水下滑翔机收集了大量稳态数据,为其垂向速度的计算及其理论研究提供了数据支撑。
此外,水下滑翔机还具有对海洋环境噪声进行长时序大范围的观测能力。尹云龙等[62]开展了水听器与“海燕”水下滑翔机的集成应用研究,结合CFD 仿真,优化了水听器在水下滑翔机本体的安装位置,并于2019 年在南海试验过程中取得了大量声学数据。
目前,任务传感器设计与集成技术发展迅速,“海燕”号谱系化水下滑翔机已经实现与水听器、深海相机、CTD、湍流仪、流速计和磁力仪等声光电磁和重力等小型低功耗传感器的集成,广泛应用于海洋环境参数的观测与探测等海上试验研究任务,效果显著。
5.2 科学观测应用
水下滑翔机搭载多类型的任务传感器,在众多的海洋观测与探测平台中,具有重要优势和应用前景。水下滑翔机的长续航、大范围和自主性等特点在科学观测中被充分证明,与其他观测手段的互补使用,可使针对海洋现象的观测立体化、精细化。杨绍琼等[63]从水下滑翔机发展历程、运行方式以及专用传感器三部分出发,结合国内外海洋学综述文献,重点对水下滑翔机观测典型海洋现象(包括中尺度涡、内波、海洋锋面及声学等)的应用进行了综述总结。
水下导航定位精度的提高对于水下滑翔机完成海洋环境观测与相关目标探测等任务至关重要。吴尚尚等[64]研究归纳了水下导航技术原理、分类以及常用算法,综述了水下滑翔机导航相关技术研究与应用的国内外现状,探讨了水下滑翔机冰下导航的技术难点和发展趋势。在观测过程中,水下滑翔机还容易受到海流等因素影响发生航向偏离,针对理论出水位置和实际出水位置偏离的问题,何柏岩等[65]提出了基于变分模态分解(variational mode decomposition,VMD)和LSSVM方法的深平均流预测模型,可指导水下滑翔机进行有效航向修正和局部路径规划。
湍流是发生在各类流体中的普遍现象,海洋湍流对海洋中的动量、热量以及物质的扩散,对海洋中物质和能量的输运,以及全球气候变化都有着重要的影响。近年来,随着海洋湍流的相关理论和技术不断发展,海洋湍流混合观测技术和现场试验进入了一个新的研究阶段。Liu 等[66]使用“海燕-湍流”水下滑翔机研究了海洋湍动能耗散率与时变的滑翔参数之间的关系,建立了基于模拟退火算法的滑翔参数模型,并在127 d 的湍流观测海上试验中获取了准确的滑翔参数,校正了水下滑翔机在下潜和上浮剖面的耗散率测量误差,为减少不确定性因素对水下滑翔机湍流微结构观测研究的影响提供了一种有效方法。图19 为该次试验回收现场图。
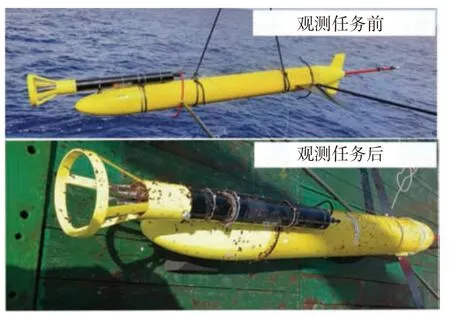
图19 “海燕-湍流”水下滑翔机为期127 d 湍流观测海上试验任务的布放与回收现场图Fig.19 Petrel-turbulence underwater glider deployment and recovery of its 127-day marine turbulence observation mission
Wang 等[67]提出了一种悬臂和压电陶瓷片的优化设计方法,为了验证该剪切探针传感器的实用性,研制了一种用于携带剪切探针测量海洋剪切速度的海洋微结构剖面仪。2010 年11 月—2011年1 月,该剖面仪历经50 d 的巡航,测量了西太平洋的湍流。马伟等[68]以团队自主研发的翼型剪切流传感器为核心测量单元,开发了面向海洋微结构湍流测量的水下滑翔机系统,并于2015 年2 月在中国南海进行了海试测试,获得了南海春季200 m 以浅剖面的湍流动能耗散率分布情况。
内孤立波(internal solitary waves,ISW)是海洋(特别在南海)中经常能够观测到的现象,它们携带有巨大的能量,并在传播过程中保持形状和速度。ISW 会引起海水严重的垂向混合,对海洋能量输送和海洋环流产生重要影响,并进一步影响声传播和海洋设备的安全。研究如何科学观测ISW 并获得研究数据对进行海洋科学发展具有重要意义。2017 年8 月,Ma 等[69]利用“海燕-II”水下滑翔机在南海北方开展了ISW 观测活动。一般情况下,在吕宋海峡产生的向西传播的内波会变陡,并演变成大振幅的ISW,可以在卫星图像中识别。在对中等分辨率成像分光仪真彩色图像分析的基础上,利用内波效应验证了温盐起伏的存在。同时采用水下滑翔机模型计算了其垂直速度,估计得到了ISW 的特征。Ma 等[70]利用水下滑翔机搭载声学多普勒双海流剖面仪测量了南海海域的流速,并将其应用于南海北方ISW 的现场观测。2017 年8 月,“海燕-II”水下滑翔机在南海北部海上试验时捕捉到了一个典型ISW,并通过分析海水温度和水下滑翔机垂直速度的波动特征进行了确认。
中尺度涡是一种普遍存在的中尺度海洋现象,通常指时间尺度为几天至几个月、空间尺度达到几百公里甚至上千公里的封闭式涡旋,对海洋环境中的温盐输运、能量传递、浮游生物的浓度及海洋气候等具有较大影响。目前在太平洋、大西洋等海域进行的大量面向该现象的海上试验充分验证了水下滑翔机对其观测的适用性。Li 等[71]利用“海燕”水下滑翔机在南海对中尺度涡进行了精细化观测,4 台“海燕”沿着东北-西南方向穿过涡旋,得到了其垂直方向的现场观测数据,采用复合分析的方法在以涡心为原点的坐标系中构建了反气旋涡旋的三维结构,结果显示,该涡旋温度影响深度达700 m、盐度影响深度达300 m。
温度和盐度是重要的海洋动力环境水文要素,在水团划分以及海洋环流研究过程中起着重要作用。此外,溶解氧的分布也是海洋生态系统的重要参数之一,在一定程度上可以反映海水中的生物活动和物理化学过程。杨绍琼等[72]采用在2019 年夏季中国第10 次北极科学考察中使用的3 台“海燕”水下滑翔机在北极海域组网观测得到的温度、盐度和溶解氧数据,对北极白令海海盆区水团分类、温度和溶解氧分布特征等进行了分析研究,观测结果如图20 所示,为我国认识极地、探索极地提供了新的应用示范。
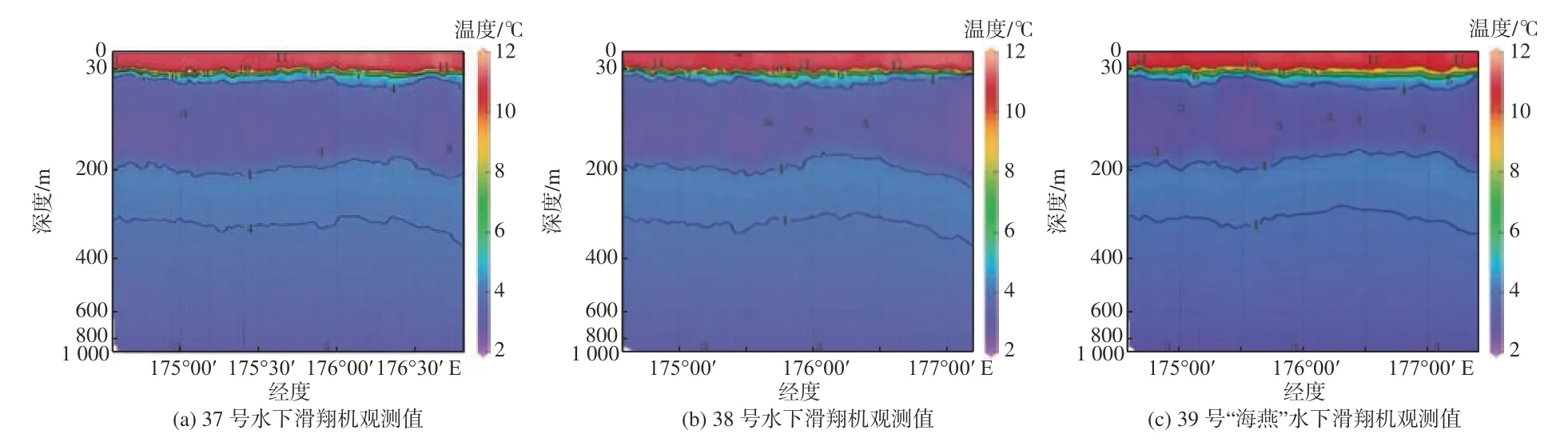
图20 2019 年夏季中国第10 次北极科学考察中“海燕”水下滑翔机观测区域内垂直断面温度分布Fig.20 Vertical distribution of temperature observed by Petrel underwater gliders in the summer of 2019,China’s tenth Arctic scientific expedition
6 结束语
作为执行海洋观测与探测等任务的重要工具之一,“海燕”号谱系化水下滑翔机技术发展受到国家部委等重点支持,近几年得到快速发展。为了满足我国海洋科学研究、海洋经济发展、海洋灾害预防等需求,近年来“海燕”号谱系化水下滑翔机在外形设计、耐压主体设计、浮力驱动单元设计、能源捕获与利用、协同组网和任务传感器集成应用等方面均取得了重要进展,并开展了大量的海上试验应用。
而随着新一代信息技术在工业上的广泛应用,数字孪生为复杂装备系统的智能设计与全生命周期智能运维提供了新的技术手段。当前“海燕”号谱系化水下滑翔机产业化发展主要有两大挑战: 1) 海洋观测与探测任务的日益多样化发展趋势,对工作深度、续航里程及任务负载等多维度、多层次、多学科的谱系化水下滑翔机系统的快速智能化设计提出了更高的要求;2) 复杂多变的海洋环境存在着海流、生物污损及腐蚀等多源不确定性,为长续航下水下滑翔机系统的全生命周期管理带来巨大挑战。基于“海燕”团队多年的基础理论创新与工程应用经验,Yang 等[3]提出了数字孪生驱动的水下滑翔机产业化发展框架(见图21),并将其分为“数字模型”、“设计优化”、“虚拟验证”和“工程应用”等4 项关键技术,为“海燕”号谱系化水下滑翔机的产业化进程指明了发展方向,也为我国其他深海装备与技术的产品化和产业化提供了一定的借鉴。
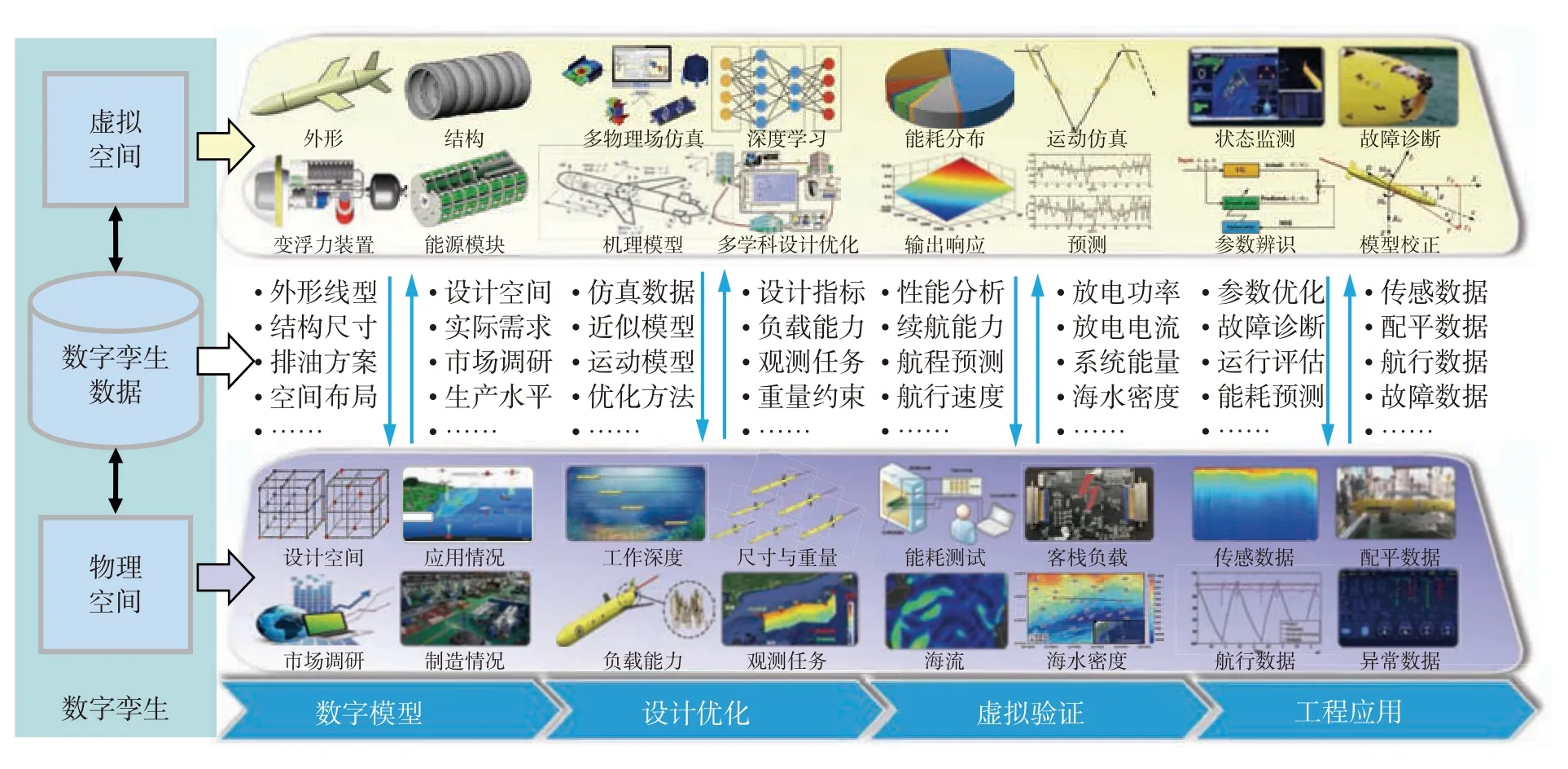
图21 数字孪生驱动的快速个性化设计和全生命周期体系结构水下滑翔机管理框架Fig.21 Architecture of Digital twin-driven rapid individualized design and full lifecycle management of underwater gliders
未来,随着水下滑翔机等深海智能装备平台继续应用于深远海,其探索能力不断增强,也必然会面临更多的技术难题和未知挑战,“海燕”团队将继续开展系列关键技术攻关,坚持为国家海洋事业和经济社会发展做好服务。
致谢 感谢编辑部邀稿及专家辛勤审稿,天津大学深海智能装备“海燕”团队发展刚逾二十载,感谢国家大力支持,同仁鼎力相助,团队潜心攻关,又喜逢《水下无人系统学报》创刊三十周年庆,谨以此文,同贺共进步。