移动激光扫描技术在过江大盾构隧道收敛测量中的应用
2023-03-13田有良
田有良
(南京地铁运营有限责任公司,江苏 南京 211100)
0 引言
在地下工程中,受到岩土层压力及衬砌限制等因素的共同作用,隧道的断面不再是标准的圆形,而是会发生微小形变的,隧道断面的形状更接近于离心率较小的椭圆。由于盾构隧道的断面结构发生变化,盾构隧道管壁在外力的作用下,出现裂缝、崩角、渗水、破损等病害,严重影响隧道结构的安全。因此,隧道段的地铁保护监测工作要能实现及时、准确地反馈数据信息,而针对隧道断面横向变形的收敛监测是盾构隧道段能安全运营的重要保障手段之一[1]。
现阶段,收敛监测的手段主要有手持激光测距仪监测、全站仪监测及移动三维激光扫描监测。手持激光测距仪的监测原理简单,用于监测隧道段的横向变形,数据精度较高,但因人工监测存在粗差、监测人员激光指错位置、激光测距仪底部未放到位等问题,严重影响监测数据的准确性,此作业形式的效率较低,且因人为因素极易造成监测断面出现遗漏等。全站仪收敛监测要人工进行架站,从而对隧道腰部位置进行点位数据采集,单一测站能监测到的隧道断面数据有限,要由监测人员不停搬动监测站,该方法效率较低。移动三维激光扫描技术是近年来兴起的一项数据获取技术,移动扫描车在隧道内进行点云数据的采集,将盾构隧道段进行弧度划分,并拟合出盾构隧道的收敛横向监测的最优监测部位,最终得到准确的隧道横向收敛监测数据[2]。
1 移动三维激光扫描数据获取
移动扫描车作为扫描仪器的载体,是获取数据的重要基础。由于盾构隧道位于地下,信号受影响,因此移动扫描车要装备里程计、角度传感器等外部装置,从而保证扫描仪能正常工作。盾构隧道中的轨道设有计轴器,为了不影响运营地铁列车的安全,扫描车经过该区段不可触碰到计轴器及其他传感器。因此,移动搭载设备选取某单位定制研发的地铁隧道移动扫描车,如图1所示,可避免对运营隧道产生影响,从而保证自身数据的准确性。
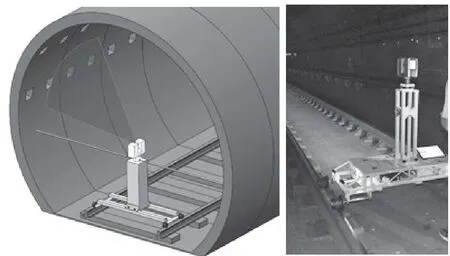
图1 隧道移动扫描车工作原理示意图和实物图
移动三维激光扫描现场作业根据作业经验可分为三部分,即作业前准备、现场作业、作业结束整理。详细的作业流程如图2所示。
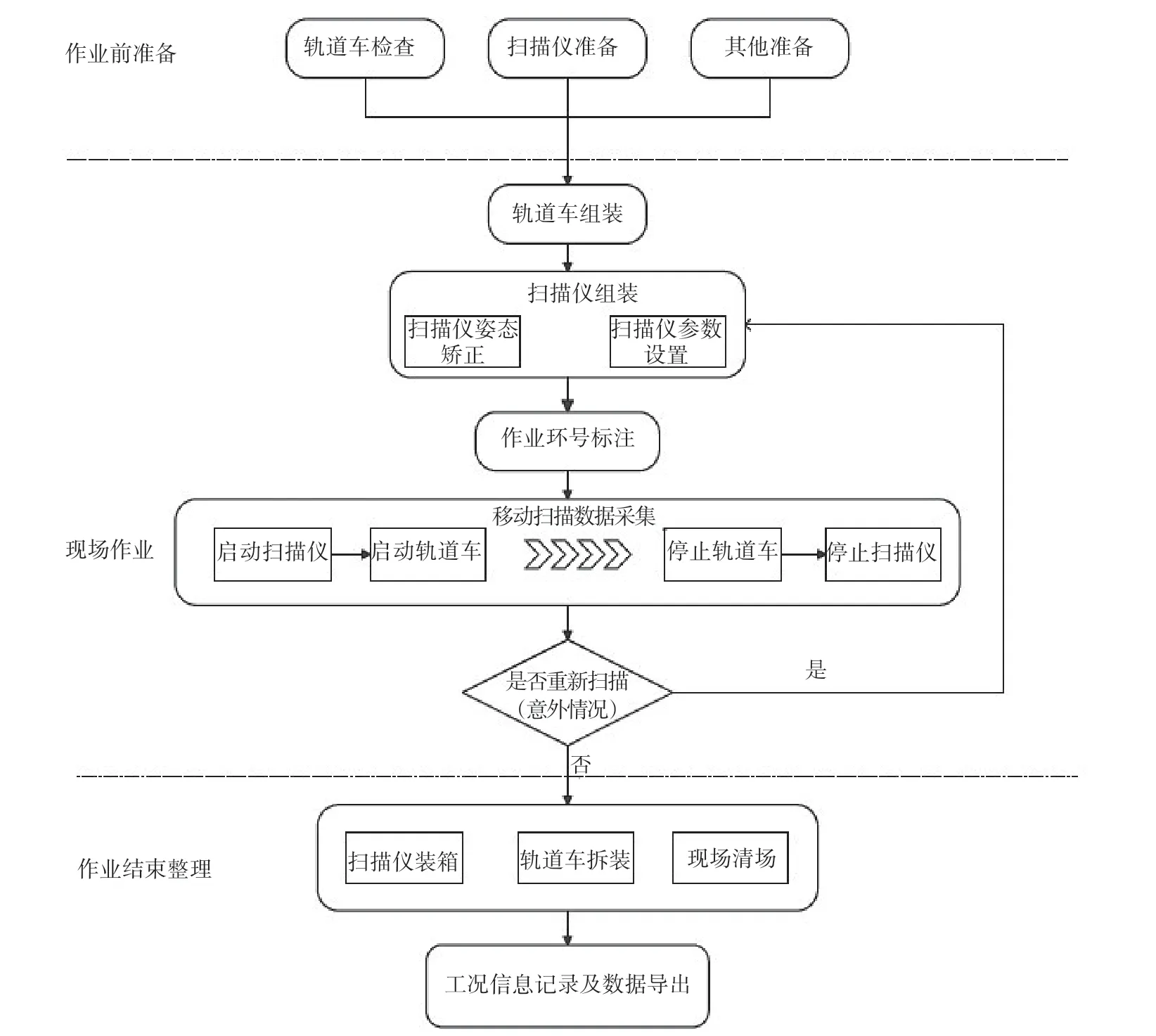
图2 移动三维激光扫描作业流程示意图
1.1 作业前准备
因为隧道内的铁轨带电,而移动扫描车架设在两侧的铁轨上,所以要保证扫描车轮绝缘,不能成为导电体。从而避免两根铁轨导电引起地铁车控制报警,影响列车的安全运营。轨道车对盾构隧道某个区间进行扫描时不能出现间断,因此要保证轨道扫描车及扫描仪的电池电量能满足作业需求。因扫描数据量较大,要保证仪器的自身存储空间足够,在进行扫描前要检查仪器存储空间的使用情况。
1.2 现场作业
现场作业要安装好电池和仪器平台,检查扫描仪基座与移动扫描车是否安装牢固,在安装完仪器后,对扫描模式、分辨率设置、现场扫描方向确认等进行设置。当轨道扫描车移动到合适位置后,设置前进挡位,保证扫描车匀速前进,从而保证扫描仪数据采集的稳定性。遇到障碍物后要停车,且在障碍物排空后,要将轨道扫描车后退至已扫描的最后一个断面,继续进行扫描。
1.3 作业结束后整理工作
在完成现场作业后,要及时关闭扫描仪,将关机后的扫描仪放于仪器箱中,扫描车拆解后放于仪器箱中,检查作业现场,要做到工完料清,保证列车的运营环境安全,待撤离作业现场后,要及时将数据信息导出保存,从而避免数据的丢失[3]。
2 数据处理
隧道移动扫描数据的处理流程如图3所示。先导入原始扫描数据,利用现场扫描的环境数据及特征点云数据来生成定位文件,并进行成果结算。
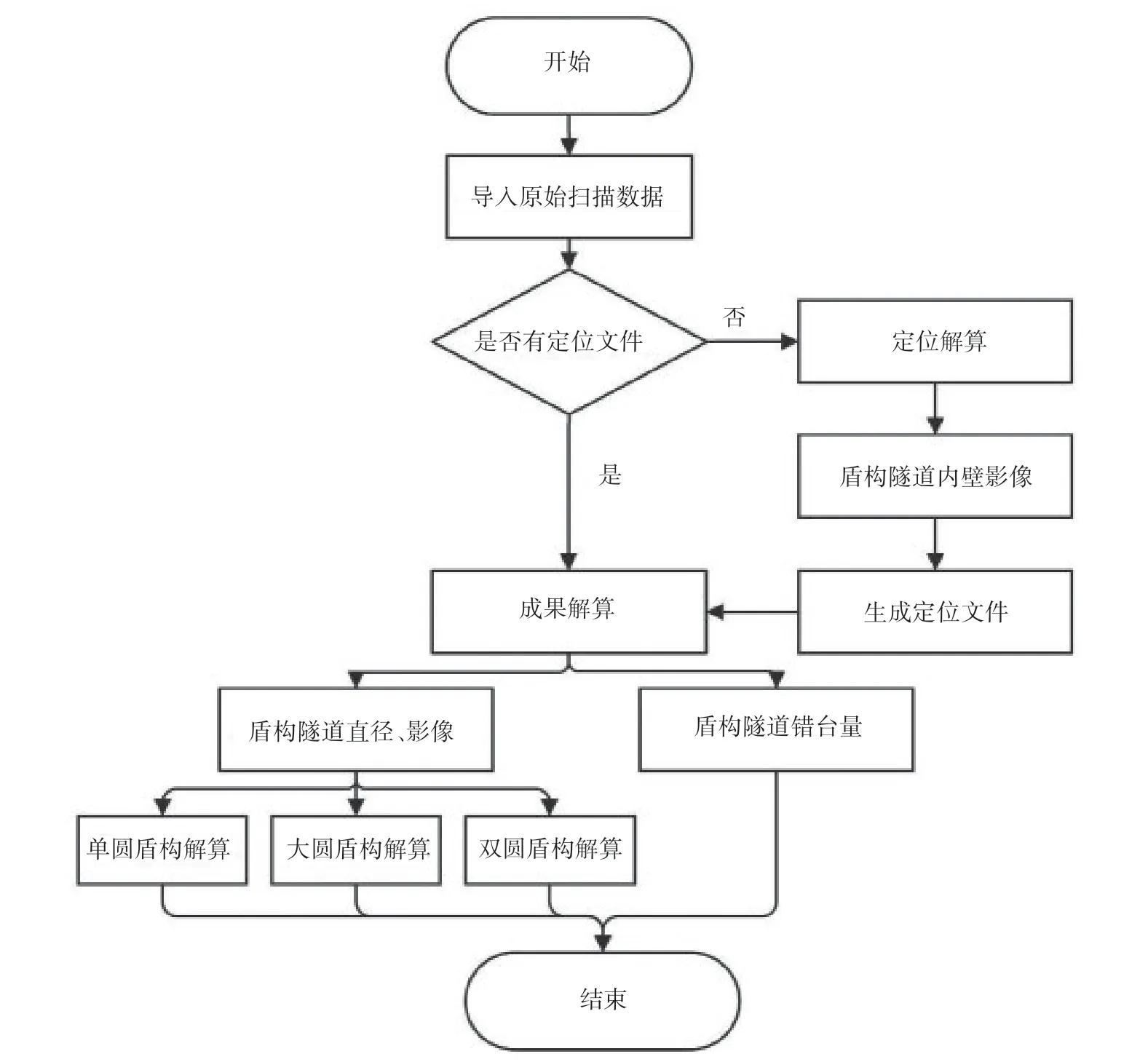
图3 隧道移动扫描数据处理流程示意图
大盾构直径隧道因中隔墙的存在,要根据扫描数据进行弧左、弧右划分,分别计算出左右水平横径,并加上隔墙厚度,即为大盾构隧道水平直径的收敛值。本研究分别使用全站仪及三维激光扫描对同区间的大盾构隧道直径收敛数据进行采集,并进行比对。
2.1 全站仪
直径量测采用全站仪极坐标法,左线瞄准直径点H点和D点,一测回盘左坐标为(X Hl,YHl,ZHl)、(X Dl,Y Dl,ZD l),盘右坐标为(XH r,YH r,Z Hr)、(XD r,YDr,ZD r)。盘左、盘右分别计算H点和D点的空间直线距离,较差小于2 mm时,取两者的平均值作为实测左线横径R。大盾构收敛监测示意,如图4所示。
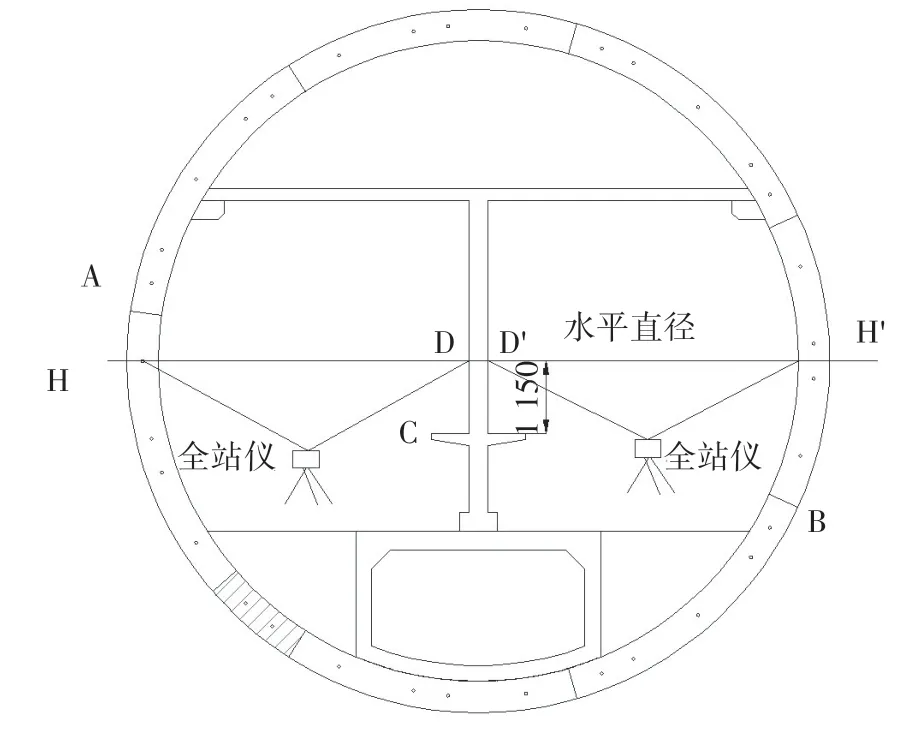
图4 大盾构收敛监测示意图(单位:mm)
相关计算公式见式(1)、式(2)。
式中:R L为全站仪盘左监测的左线横径值;R R为全站仪盘右监测的左线横径值。
计算出盘左和盘右两组空间的直线距离,取其平均值,即为左线横径的实测值,见式(3)。
式中:R左线为大盾构隧道左线横径值。
同理可得,在右线用全站仪无棱镜极坐标法,左线瞄准直径点H'点、D'点,分别计算出盘左盘右监测的两点之间的直径R'L、R'R,取其平均值,即为右线横径实测值,见式(4)。
式中:R'L为全站仪盘左监测的左线横径值;R'R为全站仪盘右监测的左线横径值;R右线为大盾构隧道右线横径值。
左线横径和右线横径相加,再加上隔墙厚度,即为水平直径的实测值,见式(5)。
式中:R水平直径为大盾构隧道直径的收敛值;R左线为大盾构隧道左线的横径值;R右线为大盾构隧道右线的横径值;D隔墙为大盾构隧道隔墙的厚度。
2.2 三维激光扫描仪
利用大直径盾构隧道错缝拼装施工工艺,以扫描车前进方向及中隔墙为基准,将盾构隧道划分为弧左、弧右两部分,弧左及弧右同环同断面均划分为4个弧段,进而拟合出各自的圆心,取极角为90°和270°两个方向值为弧左及弧右的水平径值,分别记为R L、R R,中隔墙厚度为R隔墙,则三维激光解算大盾构水平直径见式(6),大盾构直径解算示意,如图5所示。
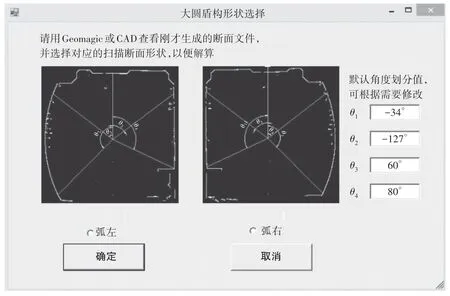
图5 大盾构直径解算示意图
3 工程实例
3号线柳州东站-上元门站区间是大直径的盾构隧道,采用双面楔形环错缝拼装,在进行曲线模拟和施工纠偏时分别旋转32.727 6°、130.909 2°、229.090 8°、327.2724°,从而实现错缝拼装。此区段长为3.4 km,共布设224个监测断面,平均每隔20 m布设一个监测断面。
为了解该区段三维激光扫描解算水平直径的精度,对使用人工手持激光测距仪、全站仪监测方法三维激光扫描解算的水平直径收敛值进行对比,得出的结果如图6、图7所示。
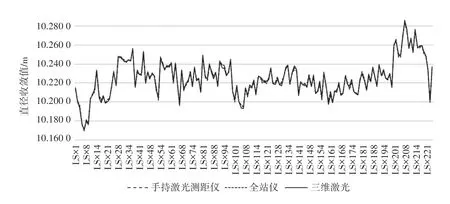
图6 三种监测方式数据对比图
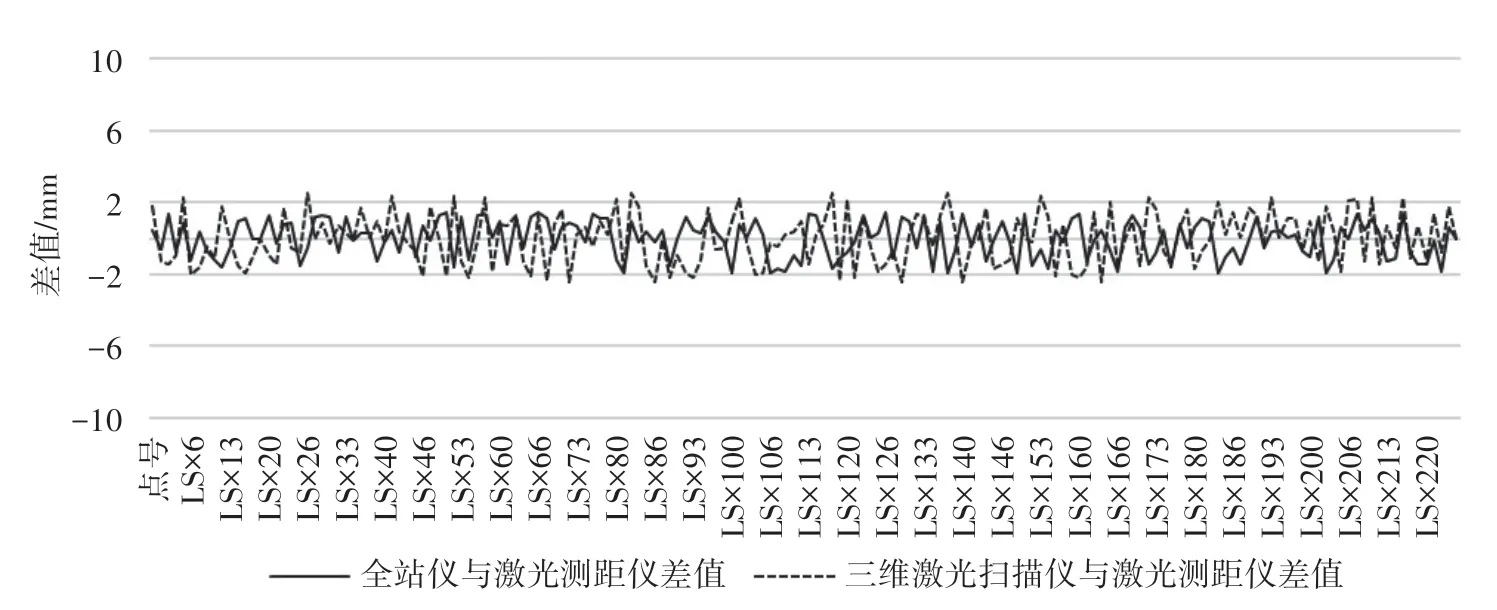
图7 全站仪、三维激光扫描分别与激光测距仪收敛值对比图
由图6和图7可知,三维移动激光扫描解算的水平直径收敛与人工测距仪及全站仪监测数据吻合,监测数据的差值分布在-2.5~2.5 mm,外符合精度为1.9 mm。
4 结论
本研究通过介绍移动三维激光扫描技术在过江大盾构隧道中的水平直径解算,并将解算值与人工激光测距仪及全站仪采集到的数据进行对比,验证结果与人工监测到的水平直径值吻合。其作业效率较传统监测方法有大幅度提升,具有一定的实用价值。