多平台LiDAR 测量技术在公路改扩建勘测中的应用
2023-03-11岳祥楠杨淑芬
岳祥楠,朱 盼,杨淑芬
(中交第二公路勘察设计研究院有限公司,湖北 武汉)
引言
随着我国综合交通基础设施的基本建成,为确保路网运营安全畅通,提升服务质量,对现有公路进行扩容改建和提档升级,逐渐成为交通运输行业的重点。公路改扩建工程对测量的精度要求远高于新建道路工程,现有的道路改扩建勘测大多采用低空航空摄影测量辅之以人工上路实测的方法,费时费力,不仅会干扰正常交通秩序,还存在较大安全隐患,在效率、安全和成本等方面均难以满足我国日益增长的公路改扩建工程需求。
三维激光扫描测量技术(Light Detection and Ranging,LiDAR)[1]是近年来兴起的高新测绘技术,可快速获取地面三维坐标,具有数据精度高、点云密度大等优势。陈楚江、余绍淮等[1-2]研究了直升机机载激光测量技术在公路勘察中的应用,并利用“高空+低空”两次飞行生成满足公路改扩建详测与施工图设计精度要求的激光数据。张霄、罗博仁等[3-4]进行了车载激光测量在公路改扩建项目中的应用实践。公维强,林伟恩,孟凡利等[5-7]进行了不同搭载方式的激光雷达在公路勘察中的应用研究。琚宝林,顾鹏飞等[8-9]将无人机LiDAR 应用于公路工程勘测。研究表明LiDAR测量技术可快速获取既有道路路面及道路周边的三维地形信息,可在不中断现有交通情况下,实现对道路交通设施基本信息的安全、高精度和快速获取。
公路改扩建工程通常需要采集公路设计线位两侧各150~200 m 范围内三维地形数据,本文提出基于多平台LiDAR 测量技术的公路改扩建工程勘测设计方法,利用无人机LiDAR 技术获取道路两侧三维空间数据,而在车流量较小时进行车载LiDAR 测量,获取路面范围内更高精度的点云数据,两者都不会中断交通。
1 多平台LiDAR 测量技术公路改扩建勘测方法
高速公路改扩建工程对路面和路外的精度要求不同,基于多平台的LiDAR 测量技术可快速获取公路改扩建项目所需的基础测绘资料,其主要工作原理见图1。
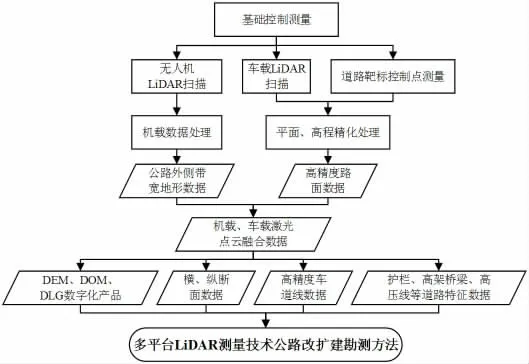
图1 多平台LiDAR 测量技术公路改扩建勘测方法
1.1 无人机LiDAR 测量技术
无人机LiDAR 测量视角开阔,不易被遮挡,自上而下的扫描视角和多次回波采集数据也更容易穿透植被而获取真实地表信息,数据更加完整。利用无人机LiDAR 可实现路线一定宽度范围内高精度激光点云与高分辨率彩色数码影像的采集。
无人机LiDAR 测量外业数据采集完成后,获取的数据包括激光原始数据、地面基站观测数据、飞行轨迹文件(POS)数据等。需对原始数据进行处理:一是数据预处理,使用IE 软件进行POS 解算,而后使用HD数据融合软件进行点云融合得到LAS 格式的点云数据;二是进行点云精度检查;三是进行选择合适的分类参数进行地面点分类,辅以人工检查编辑,获取实际地面点云,完成数字高程模型(DEM)制作,并基于DEM、原始彩色影像、POS 等数据生产数字正射影像图(DOM),生产纵横断面等。
1.2 车载LiDAR 测量技术
无人机LiDAR 测量获取的点云对路面标识线无法准确辨识,而车载LiDAR 可获取高精度的三维密集点云,用于提取公路改扩建所需的既有公路路面车道标识线、中央分隔带、护栏等信息,是以汽车为载体,搭载激光扫描仪,在汽车的正常行进过程中快速采集路面基础数据。
为满足公路改扩建勘测要求,路面范围内激光点云数据成果平面中误差不大于0.05 m、高程中误差不大于0.02 m,需沿既有公路路面上布设一定数量的靶标控制点用于精度纠正。靶标控制点的布设原则为沿既有公路两侧每隔400 m 布设1 个,两侧交叉布设,即可保证道路两侧每隔200 m 左右有一个靶标控制点,靶标控制点在道路上的布设方案见图2。

图2 激光点云靶标控制点分布示意
靶标控制点的平面位置采用GPS-RTK 平滑采集,高程按四等水准要求测量。利用道路两侧交叉布设的靶标控制点进行点云高程和平面的精化处理,从而提高点云数据精度,以达到公路改扩建勘测设计的精度要求。
2 工程应用与分析
为了验证多平台LiDAR 测量技术应用于公路改扩建勘测方法的有效性,选取沈阳至海口国家高速公路火村至龙山段改扩建工程(简称北二环改扩建项目)进行了试验。
2.1 项目概况
北二环高速是广州北部贯通东西的重要通道,近年来交通量快速增加,而且大型过境货车多、重载交通量大,造成服务水平下降,为保障车辆通行安全顺畅,迫切需要对其进行改扩建。北二环改扩建项目路线起始于与广深高速相交的火村互通,终止于与广清高速相交的龙山互通,并与东二环、西二环高速公路相接,改扩建路线全长约38.4 km。
数据采集范围为道路中线两侧各150 m,无人机LiDAR 测量视角开阔,一去一回两条航带即可完成道路两侧数据采集,但其路面精度很难达到公路改扩建项目勘测精度要求,车载LiDAR 测量可获取完整、更高精度的路面信息,但由于扫描高度和视角的限制,受道路两旁建筑物以及树木的遮挡,无法覆盖全部测区。因此无法采取单一LiDAR 测量技术,故北二环改扩建项目采用多平台LiDAR 测量协同作业方法。
2.2 多平台LiDAR 与数据处理
本项目激光雷达设备采用中海达ARS-1000L 三维激光移动测量系统,分别采用无人机LiDAR 和车载LiDAR 对项目全线进行数据采集和处理,满足精度要求后,对机载、车载LiDAR 测量得到的激光点云数据进行了融合处理,并进行相关生产应用。
2.2.1 无人机LiDAR 测量与数据处理
本项目无人机LiDAR 测量采用科卫泰KWT 六旋翼无人机搭载激光雷达设备对项目全线进行了数据采集,同步获取测区设计线位两侧的激光点云和影像数据。本项目飞行相对高度为150~250 m,激光扫描仪开角为90°,扫描宽度为300 m。
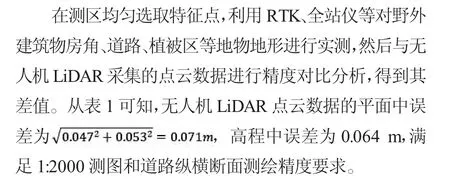
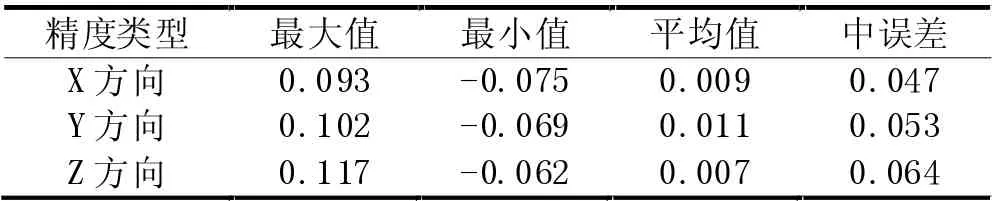
表1 无人机LiDAR 点云数据精度统计(单位:m)
2.2.2 车载LiDAR 测量与数据处理
本项目车载LiDAR 测量采用汽车搭载激光雷达设备进行数据采集,扫描过程中车速应控制在60~70 km/h,尽量保持匀速行进。车载LiDAR 测量数据处理包括POS 解算与点云融合、点云精化处理,精度检查。
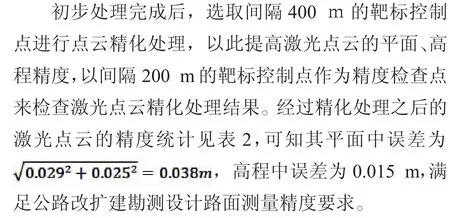
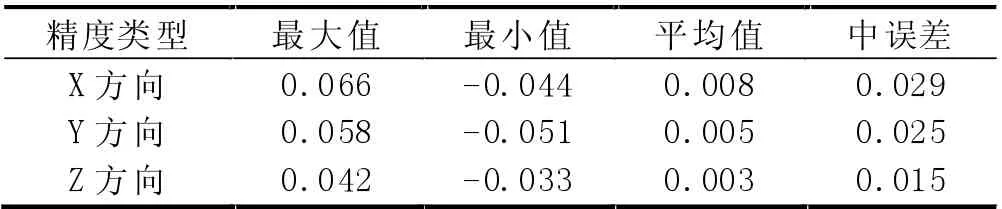
表2 车载LiDAR 点云数据精度统计(单位:m)
2.3 多平台LiDAR 测量技术应用
2.3.1 既有道路车道线识别
在公路改扩建勘察设计阶段,需要全面掌握既有道路的平纵横线形参数、路线桩号等信息。基于车载激光点云数据的强度信息,可恢复4 条车道标识线,分别为中央分隔带附近2 条车道线和靠道路外侧护栏的2 条车道线,用于道路平纵横线型拟合,见图3。
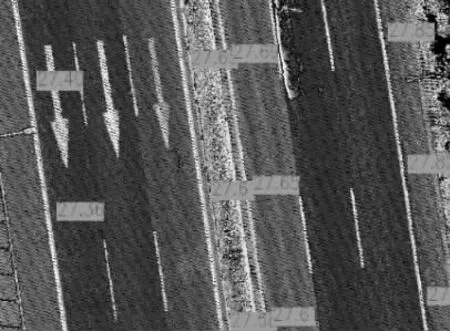
图3 既有车道标识线提取示意
2.3.2 纵横断面线快速提取
纵横断面测量是公路勘察设计中的一项重要工作,目前主要采用的方法是先利用GPS-RTK 或者全站仪放样出中桩位置,然后再测出每个横断面点的高程,此方法需要耗费大量的人力物力,且效率很低。而基于机载、车载LiDAR 融合点云数据,按中桩距离法/中桩左点法生成全线路线主线、互通、涵洞通道等纵横断面三维地面线数据,如图4 所示,此方法生成的横断面对微小地貌形态特征表现的更为细致,且极大地减少了野外横断面测量工作。
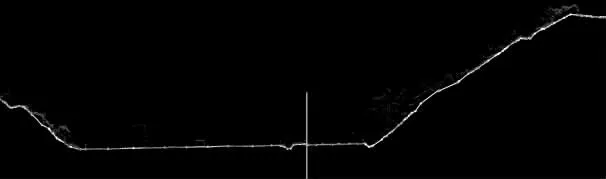
图4 横断面三维地面线
2.3.3 高压线测量
传统高压线测量方法是采用全站仪免棱镜方式测量电塔位置和高压线悬高。测量工作量大且存在一定的安全隐患,同时路线一旦调整,又需要重新测量。多平台LiDAR 测量技术通过激光点云获取高压电塔位置和高压线悬高,即使路线方案调整也不需要重新测量,见图5。

图5 高压电塔、电线激光点云
3 结论
公路改扩建工程项目,既有公路交通流量大、勘测设计工期要求紧,获取设计路线两侧三维地表信息及基础资料较为困难。多平台LiDAR 测量技术,实现了无人机LiDAR 和车载LiDAR 测量技术间的优势互补,可有效解决车载LiDAR 测量在路面范围以外的测量盲区和无人机LiDAR 难以满足改扩建既有公路路面测量精度要求的双重问题。
(1) 无人机LiDAR 数据采集范围广,适用于3D数字产品和横断面生产,车载LiDAR 的点云密度和精度高,适用于既有公路路面测量及道路附属信息提取;
(2) 多平台LiDAR 测量技术不仅可以满足公路改扩建勘测的精度要求,使工作效率得到显著提升,且不会不中断交通,保证测设人员和仪器设备安全;
(3) 基于机载、车载LiDAR 融合处理后的激光点云数据,可生成任意位置、方向和宽度的横纵断面三维地面线数据,有利于改扩建工程设计方案比选与优化,且方案变更也无需重新上路测量。
