基于ERT技术的混凝土渗透无损检测
2023-03-11李昱函朱晓军任宏伟
李昱函,朱晓军,任宏伟,秦 磊
(1.济南大学 土木建筑学院,济南 250022;2.济南大学 自动化与电气工程学院,济南 250022)
现今,包括我国在内的许多国家将以强度设计方法为主的混凝土材料与结构设计向耐久性设计过渡。混凝土耐久性与安全性设计及检测成为当今结构工程发展的重要部分[1]。水是最常见的与混凝土结构接触的介质之一,而混凝土结构是一种多孔性材料,因此水的侵入是造成建筑结构的材料性能退化以及影响其安全性与耐久性的重要因素之一[2]。对混凝土渗透检测的研究对于及时发现结构中存在的耐久与安全问题具有重要意义,目前常见的渗透检测方法有中子成像技术[3]、红外热成像技术[4]、 取芯法[5]、高密度电阻法[6]、激光检测法[7]以及同位素法[8]等。
上述方法存在检测成本高、操作复杂以及难以用于结构内部检测等问题,而以CT(计算机层析成像)技术为基础的电阻层析成像技术(ERT)可以有效解决以上技术所存在的问题,并且直观反映出结构内部的渗水范围与程度。因此笔者在混凝土渗水检测试验中使用ERT技术进行结构无损检测。ERT技术利用被测物场内不同介质具有不同的电阻率这一特性,通过布置在被测物场边界的传感器进行电流或电压激励并采集测量数据,最后在终端对测量电信号数据进行反演重建为可视化图像[9]。与其他常见的检测技术相比,ERT技术有较好的经济性、便携性、时效性等,并已广泛应用在医学界[10]、工业界[11]、建筑界[12]。
1 试验系统、图像评价模块与试件制备
1.1 试验系统
1.1.1 试验系统原理
试验使用的ERT系统是由16个电极埋入式电极组成的传感器单元、基于PXI(面向仪器系统的PCI扩展)平台搭建的激励采集单元、图像重建单元3部分组成。试验开始后,由计算机控制发出激励信号,通过16电极传感器采集电信号并传输到图像重建单元,通过特定的图像重建算法实现电信号可视化处理。ERT成像原理图如图1所示(图中横线上的字母为引脚标识)。

图1 电阻层析成像原理
1.1.2 重建算法
ERT的数物基础分析是解决问题的关键,需从Maxwell方程入手[13],并将Laplace方程简化为
∇2φ=0
(1)
式中:∇为梯度算子;φ为场内电势分布。
当在电极上施加激励电流时,ERT敏感场需满足

(2)
式中:I为激励电流分布;∂φ/∂n为沿被测场域边界外法线的导数;σ为电导率;s为边界外法向量。
试验中笔者采用共轭梯度算法[14]进行试验图像重构。共轭梯度算法适用于系数矩阵对称正定的情况,需要假设被测物场内敏感场分布不变,理论上可以进行N步迭代,从而满足
V=SG
(3)
式中:G为图像灰度矩阵;V为电压测量矩阵;S为灵敏度系数矩阵。
根据上式求得G后进行图像重构。
1.2 图像评价模块
为了客观评价笔者所搭建的ERT系统进行图像重建后的质量,需要引入图像评价指标。选用余弦相似度、峰值信噪比(PSNR)、结构相似性(SSIM)等3种全参考图像质量评价[15]方法对反演重建图像进行客观分析。
1.2.1 余弦相似度
通过计算两个向量内积空间的余弦值确定两图像之间的相似性,计算式为

(4)
式中:s(x,y)为相似性,取值为01,数值越接近1说明两图像相似程度越高;X与Y都为图像矩阵;θ为两个向量之间的夹角。
1.2.2 峰值信噪比
峰值信噪比是基于图像灰度值进行统计并平均运算的,是基于误差敏感的图像质量评价方法,计算式为[16]

(5)
式中:N为像素灰度的最大值,通常采用255;MSE为原始图像与被测图像各点灰度差的平方与图像大小的比值。
由该原理可知,PSNR值越大,参加评价的两个图像相似程度越大。
1.2.3 结构相似性
SSIM指标[17]同时考虑了亮度、对比度以及人的感知对图像所含特征信息识别的差异,是一种结合结构与人眼视觉特性的图像评价方法,其计算式为

(6)
式中:ux为图像x的均值;uy为图像y的均值;σx与σy为图像像素值的标准差;σxy为图像x与y的协方差;c1=(k1L)2与c2=(k2L)2是用来维持稳定的常数,一般取L=255,k1=0.01,k2=0.03。
SSIM的取值为01,试验评价值越靠近1,说明图像失真度越小。为了方便快速处理反演图像,笔者基于MATLAB GUI软件,编写了图像质量评价模块(见图2)。

图2 图像质量评价模块界面
1.3 试件制备
试件为直径200 mm,高180 mm的圆柱体,试件中心区域制作了一个直径为30 mm,高90 mm的孔洞,将16个电极传感器均匀布置在试件90 mm高度处,试件的配比参数如表1所示,具体模型图与实物如图3所示。

表1 试件的配比参数

图3 混凝土试件模型与实物
2 试验结果与分析
首先在为加水前进行一次数据采集与图像重建,以此为对照便于作为图像评价模块的参考。试验开始后利用大容量注射器向试件孔洞中注入清水直至清水充满整个孔洞后,进行数据采集与图像重建,之后每隔1 h向试件中心孔洞注满清水同时进行数据采集与图像重建,并记录该时间段内注入的清水体积。混凝土渗透试验现场如图4所示。试验完成后对数据进行处理,得到试件吸水总体积与时间(T)的关系(见图5)与图像重建数据(见图6)。
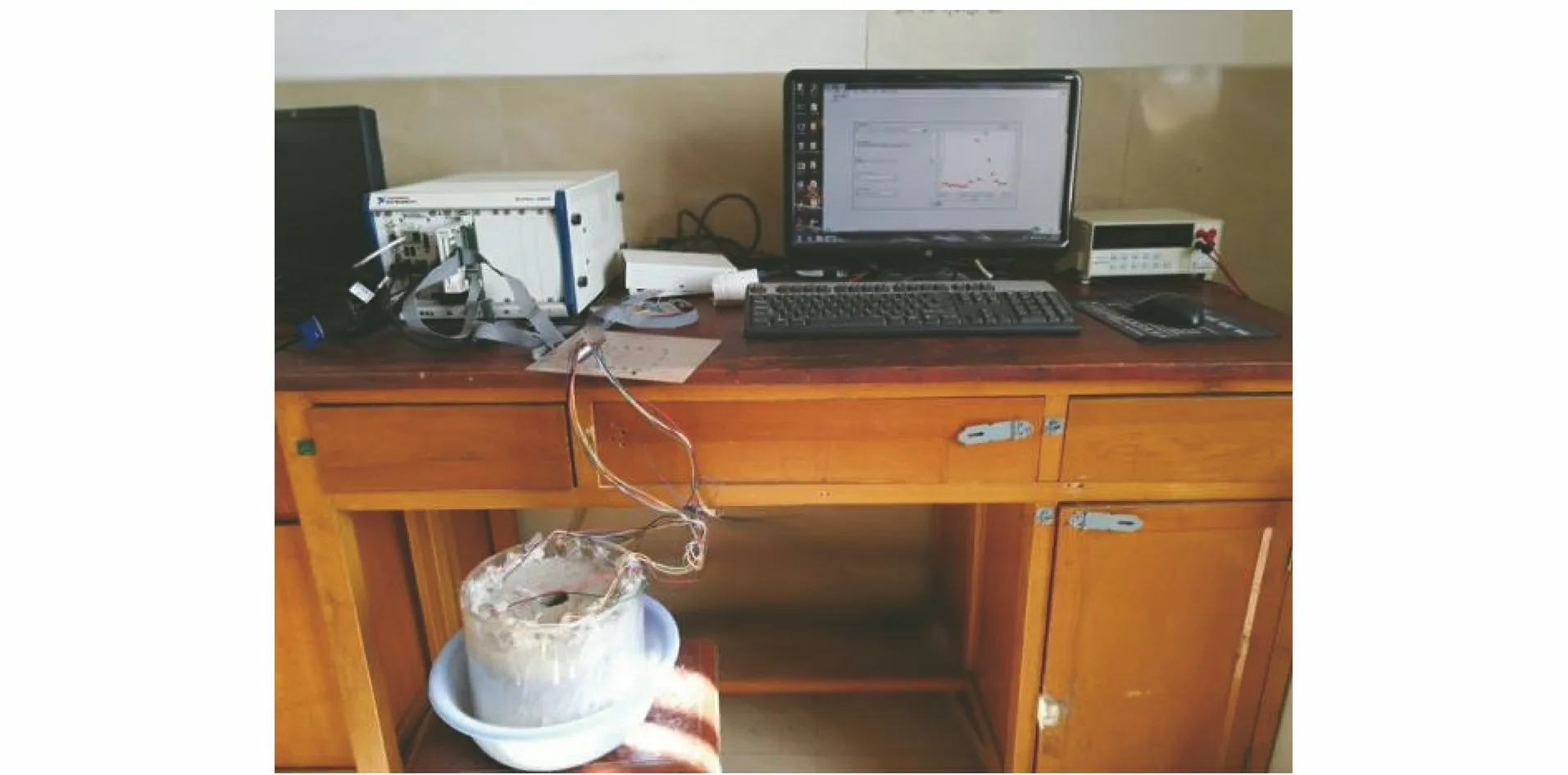
图4 混凝土渗透试验现场

图5 试件吸水总体积与时间的关系
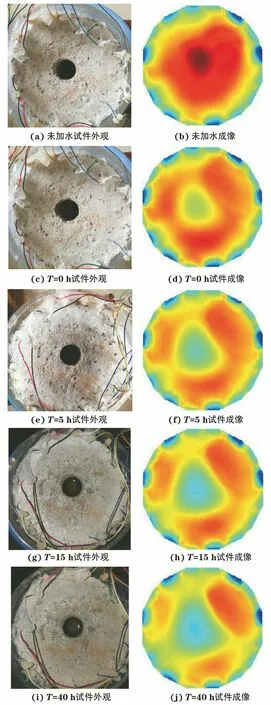
图6 混凝土渗透过程及成像结果
由于混凝土结构在干燥状态下是一种近乎绝缘的物体,其导电性与清水的导电性有较大差距,又因混凝土从宏观与微观的角度来看都是多孔性结构,故当混凝土结构中渗入清水时,其电阻率会发生变化。引入图像评价指标对重建图像进行分析,评价结果如图7所示(评价指标无量纲),图中a,b,c,d分别指代时间T为0,5,15,40 h时的重建图像。

图7 混凝土渗透试验图像评价结果
综合主客观因素分析试验结果,当试件中心孔洞还未加水时,重建图像中心颜色最深区域即为试件中心圆形孔洞的位置;当向试件中心孔洞注入清水后,与参照组相比可以看出,重建图像中心区域颜色变浅(即中心区域电阻减小),并且由于刚注入的清水暂时未渗入至混凝土孔隙中,故对孔洞周围的电阻影响不大;随着渗透试验的进行,可以看出T为5,15 h时,重建图像中心孔洞区域周围电阻的变化与T为0 h时相比有较明显差异,即随着渗透时间的增加,试件中心孔洞中的清水不断向混凝土孔隙渗透,导致孔洞周围电阻率不断下降,结合图像评价模块所得的数据发现,各项指标均有下降,说明此时重建图像与未加水前的图像差距在不断变大,这与对应试验基本相符;但在T为40,15 h时,直接观察发现孔洞四周渗水区域仍有较大变化,并结合图7可知,由于混凝土试件的含水量仍未趋于饱和状态,实际的渗透图像与ERT检测成像数据和图像评价模块所得数据相比存在一定差距。由上述分析可以得出,所搭建的16电极下的ERT系统在试验前期与中期具备确定混凝土试件缺陷位置与形状以及渗水位置的能力,但在试验后期,由于试验仪器采集精度以及ERT逆问题病态性严重等问题影响,成像效果不佳。
综合上述分析可知,ERT技术在混凝土渗水检测中是可行的,所搭建的16电极下的ERT系统初步具备了混凝土渗水检测能力。
3 结语
(1) ERT技术可以实现混凝土结构的渗水检测,能够比较准确地检测出渗水位置与范围,并可通过建立的图像评价模块进行分析,但在渗透试验后期,重建图像与实际试件渗透图像的相关性变小。
(2) 所用试件为砂浆试件,由于水的渗透往往伴随氯离子的侵入,对在正常使用中的钢筋混凝土试件损害更为明显,下一步需要研究ERT技术对钢筋混凝土试件的渗透探测能力。
(3) ERT的逆问题病态性严重制约着其发展,为了使ERT技术可以更广泛地应用于建筑领域,还需进一步优化数据采集能力与图像重建算法,随着目前硬件的升级迭代与算法的不断更新,将来ERT技术必定可以实现定量分析。
