无人船联合多波束在水工建筑物检测中的应用研究
2023-03-10毕继鑫
毕继鑫
(浙江华东测绘与工程安全技术有限公司,浙江 杭州 310014)
水电工程是我国经济发展的重要基础,截至2021年年底,我国已建水库大坝9.8 万多座,总库容达8 983亿m3,基本覆盖我国境内所有大江大河,与河道、堤防、蓄滞洪区构成的流域防洪工程体系能够在暴雨洪水发生时保障人民群众的生命财产安全。然而,我国80%以上水库大坝修建于20 世纪50 年代至70年代,运行期间水工建筑物受勘测设计缺陷、施工质量漏洞、管理不到位等人为因素以及洪水、地震、滑坡等自然因素的影响存在不同程度的老化、塌陷错位、冲蚀磨损、泥沙淤积等病险,极易造成不良后果,给国家和社会造成巨大经济损失。因此,对水库大坝周边水下基础设施或地质情况进行定期检查,了解水工建筑物的水下运行状态,提供保养维护、除险加固的检测依据,成为水电站运行管理的重要基础工作。
受限于水电站水下检测设备发展缓慢,相关研究尚处于起步阶段。来记桃等[1]综述了多波束测深系统、侧扫声呐、三维实时声呐、水下摄像机在雅砻江流域水电站水下检测中的应用;王瀛勇等[2]采用SeaBat 8125 多波束测深系统获取坝面点云数据,基于Mi⁃croStation 平台构建不规则三角网形成了水电站坝面平整度检测方法;张智敏等[3]基于SONIC 2024 多波束测深系统研究了水电站围堰淤积监测及冲淤分析方法;刘海宝等[4]将SONIC 2024 多波束测深系统应用于水电站坝前铺盖检测,重点介绍了其数据采集及处理工作。上述研究都是将多波束测深系统搭载于有人船完成水工建筑物的检测,然而,水电站普遍地处非通航水域,水上作业安全隐患较大。基于此,本文以白沙河水电站为研究对象,将华微6 号无人船联合NORBIT多波束测深系统应用于水电站各类水工建筑物的水下检测,重点研究其岸基通信、数据采集、数据处理、数据分析等关键技术,以期为白沙河水电站的管理及除险加固提供依据。
1 无人船联合多波束测深系统工作原理
1.1 NORBIT 多波束测深系统
NORBIT 多波束测深系统是挪威NORBIT 公司推出的新一代集成化、轻便化、高精度的多波束测深系统,系统量程0.2~275.0 m,中心频率400 kHz(支持200~700 kHz 可调),波束角度0.5°×1.0°(垂直航线×沿航迹),波束开角7°~210°可调,最大输出频率达60 Hz,每脉冲击发含256 个波束。NORBIT 多波束测深系统集成一体化见图1,系统将换能器基阵、POS MV Wave⁃master 定位定向测姿硬件、AML Smart SV 表面声速探头集成一体化,甲板单元仅由1 根网线便可解决同类系统至少需要5 根连接线才能接通多波束测深系统的问题。

图1 NORBIT 多波束测深系统集成一体化
1.2 多波束无人船平台
把NORBIT 多波束测深系统搭载于华微6 号碳纤维可拆卸式无人船平台进行水工建筑物检测,见图2。船体尺寸1.80 m×0.50 m×0.25 m,吃水0.15 m,最大载重50 kg,能在5 级风3 级浪环境下稳定工作。NORBIT 多波束换能器与含橡胶的无人船套筒通过法兰盘及连接螺丝固定于无人船船底,换能器接收阵列朝船头方向,后天线为定位天线,前天线为定向天线;船头接有2 根网桥天线用于远程监测(基站、视频、数据通信),船尾接有两根遥控天线用于无人船遥控通信;无人船内嵌的PC 主机安装QINSy 软件用于实时存储多波束测量数据,声呐电缆、定位定向电缆、网线、电源线等插入甲板单元对应接口,同甲板单元安置于船体前舱。此外,无人船内有3 块电池,分别用来对主控和左桨供电,对右桨供电,对换能器、甲板单元、网桥以及串口服务器供电。

图2 华微6 号无人船
1.3 多波束测深系统检测水工建筑物原理
NORBIT 多波束测深系统采用指向性正交的两组换能器基阵对声呐波束进行发射和接收(见图3),发射基阵平行于无人船首尾线排列,接收基阵垂直于无人船首尾线排列。

图3 多波束测深系统检测水工建筑物的工作原理
检测水工建筑物时发射基阵形成的扇形声波波束照射无人船正下方的狭窄水域并启动计数器,声波接触水域底部水工建筑物时发生反射[5]。各反射点空间位置不同使波束返回时间各不相同,接收基阵接收的回波中包含水下各反射点的空间信息,对各回波信号进行固定方向的多波束形成、幅度检测、能量累积等处理,直至接收基阵对所有待测角度的回波接收完毕,即完成一次条带式测量,此时根据对应角度波束的计数值和测量声速值可计算各反射点距离换能器的距离,再经三角变换可得到水工建筑物多点位的深度信息。
使用多波束测深系统对水工建筑物检测时通过布设密集的测线保证各次测量的条带边缘具有一定重叠度,以此实现水工建筑物的全覆盖精确水深测量,对测深数据进行潮位、声速、定位、姿态等辅助参数改正后,基于离散水深数据三维建模法实现水工建筑物可视化检测。
2 无人船联合多波束测深系统对水电站数据采集与处理
2.1 水电站概况
白沙河水电站位于湖北省竹溪县兵营乡境内的泉河流域,以发电为主,兼有航运、养殖等综合效益,电站装机容量50 MW,工程规模属大(2)型,大坝为混凝土面板堆石坝,水库最大库容2.476 亿m3,最大坝高104 m。水电站坝前防渗铺盖顶部高程380 m,顶宽4 m,坡比1 ∶2.5,其中下层铺盖采用粉质黏土铺盖,上覆石渣混合料,下层粉质黏土铺盖顶宽2 m,坡比1 ∶2.0。采用华微6 号无人船联合NORBIT 多波束测深系统进行水下扫测检查,检查区域主要为上游大坝坝前及右岸水工建筑物。
2.2 岸基通信与测线布设
无人船和操作平板均设有连接网桥主机的无线网桥天线,PC 端通过网线连接电脑,配套使用华微6 号无人船Auto Planner 软件进行测线布设,通过设置TCP 连接、远程主机IP 和端口号进行无人船遥控通信与远程测量监控(见图4),其测量数据实时存储在无人船内部嵌入的主机内存盘。水电站测量分为计划自动测量和现场人工测量,对于白沙河水电站坝前开放水域设置自动控制航线,航线间距为40 m;对于坝前边界水域,为防止无人船撞岸倾覆,切换为手动控制航线。

图4 无人船测线布设及远程测量监控
2.3 校准测量
开展白沙河水电站检测作业前进行艏向校准工作(见图5),先操纵无人船绕8 字行驶3 次,然后反向航行30 s,最后同向前进航行30 s,重复上述操作直至艏向均方根值低于0.5°,NORBIT 多波束测深系统自动解算GPS 相对位置关系。

图5 艏向校准
2.4 数据采集
采用快速静态法获取白沙河变形监测点TN01、TN02、TN03、TN04、TN05 在WGS-84 椭球下的平面坐标和大地高程,在监测点TN03 架设Trimble R8 GNSS接收机作为基准站并开启静态测量模式,无人船联合多波束测深系统现场工作见图6。采用WBMS GUI 声呐软件对NORBIT 换能器声呐进行控制,无人船基于内嵌的POS MV Wavemaster 定位定向测姿系统自动记录GNSS 数据、来自IMU 的角速度和加速度以及来自方位角测量系统的航向数据,采用毫秒级的时间精度同步位置、方向、涌浪、速度等指标。在QINSy 数据采集软件Setup 模块添加NORBIT 声呐、GNSS、罗经、姿态传感器并配置参数,设置白沙河水电站地理参数及上述传感器相对位置,基于Online 模块进行XTF 格式的多波束数据采集、数据质量控制及数据存储,实时生成DTM 模型进行3D 显示。

图6 无人船联合多波束测深系统现场工作
2.5 数据处理
2.5.1 定位数据处理
基于TN03 基准站的静态数据对无人船轨迹POS数据进行单基站紧组合差分GNSS 后处理[6]和定位测姿数据中误差计算,以GPS 历元为横坐标,分别以后处理定位中误差、后处理姿态误差为纵坐标,绘制无人船实时轨迹数据定位测姿误差变化图(见图7)。分析可知,北坐标平均中误差为0.014 m,东坐标平均中误差为0.012 m,高程平均中误差为0.026 m,横摇平均中误差为0.748 arc-min,纵摇平均中误差为0.749 arcmin,艏向平均中误差为1.970 arc-min,上述中误差值均小于相关规范要求,因此单基站紧组合差分GNSS后处理可极大提高水电站多波束检测数据的定位精度。

图7 无人船实时轨迹数据定位测姿误差变化
2.5.2 水深数据处理
基于CARIS 软件并采用无验潮模式对水电站多波束水深数据进行后处理,由于多波束搭载于已出场检定的无人船上,因此不需进行校准测量求取系统的横摇校准值、纵摇校准值、艏向校准值。水深数据处理流程具体如下:
(1)新建船型文件并在船型文件中输入多波束测深系统各传感器的相对位置信息,然后利用船型文件新建工程文件。
(2)将XTF 格式的多波束测量数据导入CARIS软件,其中Ship Navigation 格式选择含有GNSS 高程数据的Raw Navigation Records,其他导入设置与传统验潮模式相同,之后将POS Pac 解算的含有无人船定位信息的SBET 数据文件导入CARIS 软件。
(3)进行导航数据、姿态数据、航向数据和水深数据的质量检查。
(4)在Sound Velocity Correction 模块进行声速改正,基于Single Height 模式并结合POS Pac 计算的无人船GNSS 天线大地高程在Compute GPS Tide 模块计算GPS 潮位数据。
(5)通过Merge 功能对水深数据、GPS 潮位数据、罗经数据、无人船GNSS 天线三维坐标及其与换能器的相对高度进行合并,实现条带水深转换计算,输出坝前水底大地高程。
(6)基于TPU 值以及监测点与曲面网格节点的距离,通过CUBE 算法对节点进行改正[7],生成网格化水深地形曲面。
(7)根据网格模型对水深数据分子区进行编辑,建立水下地形表面网格模型(见图8),基于此模型导出0.1 m 格网间距的点云数据。

图8 白沙河水电站坝前水下地形表面网格模型
2.5.3 坐标转换
白沙河水电站多波束测量数据成果主要为WGS-84 椭球下的平面坐标系(高斯-克吕格投影,3°分带,中央经线111°00′00.00″E)、大地高程系统,而水电站设计图纸及日常运维均采用挂靠于BJ-54 椭球的白沙河独立坐标系(中央经线109°33′02.325647″E、高程投影面450 m)、1956 年黄海高程基准。为使多波束测量成果与水电站系统基准保持一致,首先基于式(1)的布尔萨七参数坐标转换模型,以TN01、TN02、TN03、TN04 为公共点,通过最小二乘法平差计算坐标转换七参数;再把TN05 作为检核点,检核点转换残差为毫米级;最后结合坐标转换七参数和布尔萨七参数坐标转换模型[8],将多波束测量坐标系转换为白沙河坐标系。
式中:x2、y2、H2为白沙河坐标;x1、y1、H1为多波束测量坐标;Δx0、Δy0、ΔH0为平移参数;εx、εy、εH为旋转参数;m为尺度比参数。
3 水电站多波束检测成果分析
将白沙河水电站总布置图中的防渗铺盖顶部平台、发电进水口、导流放空洞等水工建筑物与多波束扫测点云数据进行叠加,结果见图9。
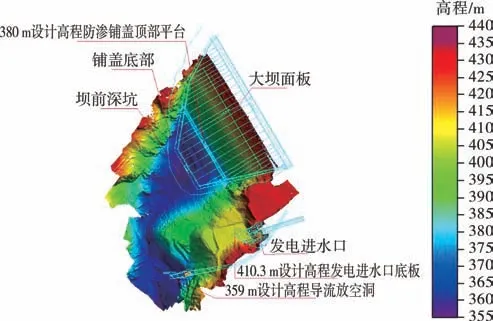
图9 白沙河水电站水下建筑物分布
3.1 防渗铺盖顶部平台
采集白沙河水电站坝前防渗铺盖顶部平台边界横剖面点绘制其横剖面图,见图10。分析可知,防渗铺盖顶部平台不再保持水电站建立时的水平状态,目前防渗铺盖顶部平台呈现由下游向上游倾斜的状况,即防渗铺盖顶部平台靠近下游边界高程均高于上游边界高程。防渗铺盖顶部平台的高程变化规律分为3 段:①沿坝轴线相对于左岸距离35.0 m 范围内,防渗铺盖顶部平台高程平均值从左至右自379.956 m 递减至377.426 m;②沿坝轴线相对于左岸距离105.0~128.5 m范围内,防渗铺盖顶部平台高程平均值从右至左自378.864 m 递减至377.523 m;③沿坝轴线相对于左岸距离35.0~105.0 m 范围内,防渗铺盖顶部平台高程变化幅度较小、趋于一致,平均高程为377.427 m。

图10 白沙河水电站坝前防渗铺盖顶部平台边界横剖面
3.2 防渗铺盖底部
白沙河水电站坝前防渗铺盖底部横剖面见图11,防渗铺盖底部平均高程为359.232 m、最大高程为365.687 m、最小高程为356.908 m。通过比较水电站原布置图中坝前防渗铺盖底部高程347.80 m,可知坝前最小淤积厚度为9.108 m、最大淤积厚度为17.887 m、平均淤积厚度为11.432 m。

图11 白沙河水电站坝前防渗铺盖底部横剖面
3.3 左、右岸山体及坝前深坑
水电站原布置图中标记坝前深坑底部高程为347.8 m的平坦区域,发电前左岸山体有多条穿插小路。本次多波束检测成果显示左、右岸山体清晰可见,但将检测成果与原布置图记录的左、右岸山体及坝前深坑高程进行对比,发现左岸山体下侧整体高程提高,分析原因是水库淹没导致山体上端不稳固区域产生滑坡堆积至坝前深坑。防渗铺盖底部坝面高程361.0 m以下呈现出滑坡体(见图12),覆盖坝面左侧约1/2 面积,坝前深坑淤积情况与防渗铺盖底部淤积情况保持一致。

图12 坝前深坑滑坡体
3.4 发电进水口
上游发电进水口多波束检测三维成果见图13。图13(a)为多波束检测结果与水电站原布置图叠加后的局部放大,其中绿色线为发电进水口侧平台外立面原始上轮廓线、红色线为水工建筑物其余轮廓线,图13(b)为发电进水口区域检测三维模型,综合对比可知发电进水口侧平台边缘冲蚀磨损严重。此外,进水口底板塌陷成3 个区块,其中:区块1 平均高程为410.9 m(与水电站原布置图一致),区块2 平均高程为409.6 m(平均塌陷0.7 m),区块3 平均高程为407.0 m(平均塌陷3.9 m)。

图13 发电进水口多波束检测三维成果
3.5 导流放空洞
导流放空洞洞口横剖面见图14,与水电站原布置图中导流放空洞洞口高程359.0 m 相比,白沙河水电站导流放空洞洞口存在0.6~1.6 m 厚度的淤积。
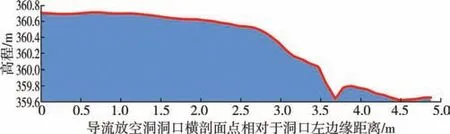
图14 导流放空洞洞口横剖面
4 结 语
华微6 号无人船外观小巧、安装方便、航行稳定、速度快、续航能力强、不易搁浅,极其适用于地处非通航水域的水电站声呐检测工作。通过开展无人船联合NORBIT 多波束测深系统在白沙河水电站水工建筑物检测中的应用研究,验证了无人船联合NORBIT 多波束测深系统的可行性和可靠性,主要成果如下:
(1)对NORBIT 多波束测深系统采集的水电站实测数据处理后,其结果能如实反映水工建筑物水下真实情况,水下微地形地貌清晰可辨,可为水工建筑物检修设计与施工方案的完善、变更等提供依据。
(2)无人船联合多波束测深系统对水工建筑物塌陷错位、泥沙淤积、冲蚀磨损情况检测效果较好。白沙河水电站发电进水口底板、防渗铺盖顶部平台产生一定程度的塌陷错位,防渗铺盖顶部平台靠近下游边界高程均高于上游边界高程。防渗铺盖底部坝面高程361.0 m 以下呈现出滑坡体,水电站坝前深坑、导流放空洞洞口均存在不同程度的淤积。水电站发电进水口侧平台边缘冲蚀磨损明显,检测成果可以清晰判断其冲刷磨损范围及程度。