无人机通信感知一体化:架构、技术与展望
2023-03-10刘晨熙马睿彭木根
刘晨熙,马睿,彭木根
无人机通信感知一体化:架构、技术与展望
刘晨熙,马睿,彭木根
(北京邮电大学信息与通信工程学院,北京 100876)
无人机应急通信作为第六代移动通信系统(6G)的一种典型应用,具有灵活部署、按需覆盖的优势。与此同时,通信感知一体化是6G的重要特征和核心使能技术之一,它可以应用于无人机应急通信中,以提升频谱效率、感知精度,降低系统成本,但二者如何结合,仍是学术界和工业界的研究热点和难点。为此,提出了一种无人机通信感知一体化的体系架构,探讨了支撑该架构的基础理论和关键技术,并展望了无人机通信感知一体化的未来发展方向及挑战。
通信感知一体化;无人机通信;智能服务
0 引言
无人机应急通信是6G的典型应用,具有灵活部署和广域覆盖的优势,近年来得到了学术界和工业界的广泛关注[1]。相较于传统地面基站,无人机具有高机动、强视距、易部署等优势,可为热点区域、应急场景等增加容量、补充覆盖。具体地,在无人机上搭载通信、感知设备,可为指定区域提供按需的数据传输和感知服务,为受灾地区提供通信保障。
与此同时,为进一步支撑智能车联网、增强现实/虚拟现实(augmented reality/virtual reality,AR/VR)等新兴智能应用,6G在适配巨容量(极致传输速率至1 Tbit/s)、极高可靠性(误码率至10−7)、极低时延(传输时延至0.1 ms)等极致通信性能需求的同时,还需要支持广域感知和高精度的定位、探测、成像等。在此背景下,通信感知一体化技术因在智能感知和高效无线传输方面的巨大潜力,已被认为是6G的重要特征和关键性赋能技术。通信感知一体化可充分发掘通信和感知技术各自的优势,通过新的一体化波形设计,利用同一无线信号同时完成通信和感知功能,可提高资源利用率,实现通信、感知性能的均衡普惠[2]。利用感知信息可以实现更精确的波束成形和波束跟踪设计,减少导频资源的开销,提升波束成形增益。同时,通过对多节点感知信息的交互与融合,可以进一步提高系统的感知精度和范围。
将无人机与通信感知一体化技术结合可以提高无人机的环境感知能力,无人机可根据感知的环境信息,为地面用户提供更加精准的覆盖,实现更加智能的无线组网。同时,无人机的强视距特性可以减少感知盲区,扩大感知的范围,实现广域感知。然而,二者的结合也面临如下挑战:首先,当前无人机通信感知一体化研究大多聚焦单无人机场景[3-6],通信和感知性能受限,亟待研究支持通信感知一体化的多无人机组网架构和方案;其次,无人机平台高抖动、强视距的特性使得无人机通信感知一体化存在易受干扰的问题,现有面向传统地面移动通信系统的通信感知一体化性能分析模型、波束追踪及成形方案难以适用,亟须研究适配无人机特性的通信感知一体化传输性能分析模型及方法;最后,现有无人机系统的研究多关注通信单一维度,难以实现无人机通信感知一体化对通信和感知性能的联合设计。为高效支撑多无人机组网下通信感知性能的多维极致需求,实现通信感知的普惠均衡,亟须研究多无人机协同感知及多维资源调配方法。
1 无人机通信感知一体化体系架构
本节提出了一种无人机通信感知一体化的体系架构,并讨论了支持该架构的基础理论。
本文所提的无人机通信感知一体化体系架构如图1所示。具体来说,该架构通过对目标用户的感知,实现对目标区域的精确覆盖,提高系统容量,改善用户的服务质量(quality of service,QoS);通过对感知信息的传输实现感知信息的数据融合,实现无人机的全局感知,提升了感知精度和感知范围。该架构主要由非系留式无人机和系留式无人机组成。其中,根据自身负载能力的不同,非系留式无人机可选择搭载通信感知一体化基站或射频拉远头(remote radio head,RRH),机载通信感知一体化基站配备轻量化人工智能(artificial intelligence,AI)引擎,具有一定的存储计算能力,能够执行相关AI算法对感知数据的预处理,实现对局部区域的感知,机载RRH则能为热点地区进行补充覆盖,且具备初步的感知功能。系留式无人机与地面指挥中心通过光纤连接,可以进行信息的回传与分发,实现感知信息的融合与无人机状态的监测与控制。
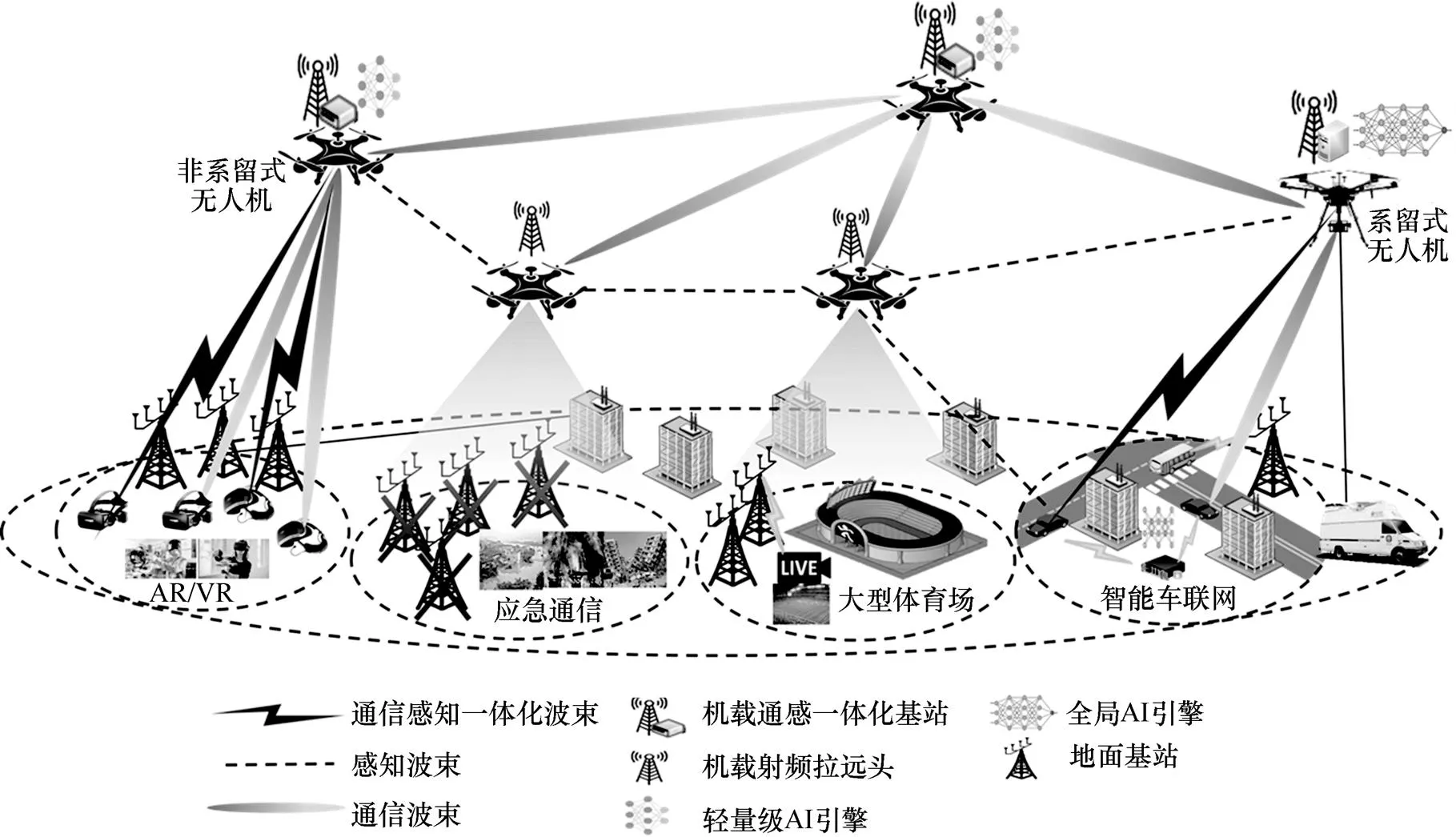
图1 无人机通信感知一体化体系架构
通信感知一体化无人机能够发射3种波束:通信感知一体化波束、感知波束、通信波束。利用通信感知一体化波束,非系留式无人机在为地面用户提供通信服务的同时,通过反射的回波信号实现对地面用户的探测、定位;感知波束则可用于实现相邻无人机的位置感知,避免发生机间碰撞。此外,感知波束还可以实现无人机对地面障碍物分布情况的感知,提升无人机的视距传输性能;非系留式无人机对地面用户和物理环境的感知信息将会通过通信波束回传到系留式无人机,系留式无人机感知信息回传至地面控制中心,同时将控制信息发送至各分布式通信感知无人机,实现对各无人机的灵活部署。
该架构的优点在于非系留式无人机节点搭载的通信感知一体化基站能够在服务地面用户的同时,实现对用户和环境的探测,利用感知信息对波束成形方案进行设计,使得通信感知波束能够尽可能精确地对准服务用户,实现对目标用户的精准覆盖,同时降低了用户间的相互干扰,利用感知信息提升了通信服务性能;另一方面,无人机的随机抖动等因素,会影响无人机对通信感知回波信号的接收,使得局部感知信息误差增大。为了实现对局部感知信息的误差修正并获取全局感知信息,该架构借助系留式无人机和地面控制中心的AI决策能力对各非系留式无人机上传的局部感知信息进行误差分析校正,并对校正后的感知信息进行数据融合,生成全局感知信息。全局感知信息包括地面用户和环境信息(用户分布情况、速度、加速度和障碍物分布情况等)以及各分布式通信感知无人机的空间部署情况和自身状态信息(三维位置、飞行速度、剩余能量、用户连接情况等)。系留式无人机根据全局信息,对各无人机的部署方案进行灵活调整,在提升无人机感知性能的同时,增强了无人机系统的鲁棒性。
该架构可以满足不同业务的需求,对多种应用场景进行灵活适配。例如,利用通信感知无人机实现地面基站故障时的应急通信、热点地区的补充覆盖,以及在车联网场景中的车辆信息实时监测和交互。利用无人机上部署的自适应AI算法可以完成对物理世界的实时感知和建模,为实现智能车联网、AR/VR等对感知精度要求较高的智能化业务提供支撑。需要注意的是,通信系统和感知系统的设计准则不同。通信系统的设计目标为,从包含干扰的信道中无失真地恢复信源信息,其主要聚焦的性能指标包括吞吐量、能耗、时延、能量效率、频谱效率等。香农公式阐释了在给定信噪比的条件下信道容量的理论上界。感知系统的设计目标则是利用测量信息或经验数据,尽可能精确地对未知环境参数进行估计,最小化参数估计的误差,提升感知精度和准确度。刻画感知性能的指标主要包括识别精度(识别准确率、分辨率等)、估计精度(均方误差、克拉美罗界等)以及检测精度(虚警概率、检测概率)。此外,传统的无线探测理论表明,无线感知精度及参数估计误差与信干噪比关系密切,回波信号的信干噪比会直接影响感知的距离、分辨率以及准确度等,这为通信感知一体化的设计提供了理论依据[7]。
基于以上理论,下面讨论无人机通信感知一体化体系架构中感知如何增强通信、通信如何增强感知以及如何实现通信感知性能的普惠均衡。
(1)感知增强通信
搭载通信感知一体化基站的非系留式无人机可以通过回波信号对地面用户的位置进行感知,获取相关的用户角度信息,利用该信息能够提升无人机的波束成形增益,实现更智能的无线资源分配,提升无人机系统的整体通信性能。具体而言,在波束成形方面,对于静止或移动速度较小的用户,无人机可根据感知的角度信息,设计较窄的波束对其进行精准覆盖,精确地指向用户的接收天线,提高波束成形增益并降低用户间的干扰,从而提升传输速率。对于移动速度较快的用户,如地面车辆等,无人机可先用较宽的波束对其相邻几个时隙内的角度信息进行探测,并利用分布自适应的AI算法对该用户的运动状态信息进行分析预测,再设计较窄的波束对该用户进行跟踪覆盖,从而提升通信性能。与传统地面移动通信系统基于导频的波束跟踪方法相比,该方案不仅提升了波束跟踪的准确性,还减少了信令的开销,提升了资源利用率。在无线资源分配方面,由于地面用户的分布不均且移动性差异较大,无人机的资源分配和用户调度出现了挑战。基于感知信息,非系留式无人机可以获取地面用户的分布情况和相关的物理环境信息,如障碍物位置信息等;并由系留式无人机对各节点的状态信息进行融合分析,从而动态调整无人机的无线资源分配方案,进一步提升无线资源的利用率。
(2)通信增强感知
感知信息的共享和融合可以提升通信感知一体化无人机的感知精度和感知范围。具体地,由于无人机的随机抖动等因素,单台非系留式无人机的感知信息存在一定的误差。为了提升感知精度,各无人机可将感知信息传输到系留式无人机上进行信息融合处理,该融合过程并不是简单的信息拼接,而是利用全局AI决策算法对局部信息进行误差修正。具体地,由于感知误差的存在,相邻非系留式无人机对同一用户的感知信息存在偏差,而系留式无人机将会利用基于AI的智能决策算法,如强化学习算法,对同一用户的多组感知信息进行分析处理,得到该用户的最终位置信息,尽可能地对感知误差进行修正,提升感知精度;另一方面,障碍物的遮挡等因素,使得单台非系留式无人机在其服务范围内存在一定的感知盲区,而上述感知信息融合的方式,可为每台无人机提供全局感知信息,扩大了感知的范围。
(3)无人机通信感知性能的普惠均衡
通信感知的均衡关系是无人机通信感知一体化设计中需要考虑的一个重要因素。一方面,为了增强信道容量、扩展覆盖范围、改善用户的QoS,无人机需要为通信波束分配更多的无线资源,如功率、频谱等;另一方面,为保障无人机的感知性能,需要为感知波束分配无线资源,牺牲一部分通信性能,换取更高的感知精度和感知范围。为了获取最大的通信感知性能增益,需要根据不同的场景,设计合理的资源分配方案,做到通信感知性能的均衡与折中,达到系统效益的最大化。无人机自身的移动特性对通信感知性能的影响也不容忽视。无人机的轨迹和位置的灵活规划,可以减少障碍物的遮挡,改善无人机与用户之间的视距信道条件,这为无人机的感知和通信覆盖创造了有利条件,能够同时提升感知精度、增加信道容量。然而,无人机的随机抖动也会加大无人机-无人机、无人机-用户之间的感知通信难度。由于无人机需要通过通信感知一体化信号反射的回波实现对地面用户的探测感知,无人机的移动和抖动会严重影响无人机回波的接收,降低无人机的感知性能。另一方面,无人机的移动和抖动还会影响相邻分布式通信感知无人机之间的空间位置感知,使得局部感知信息的误差增大。为了解决上述由无人机的移动和抖动带来的通信感知性能下降的问题,需要对无人机上传的局部感知信息进行修正,提高全局感知信息的精度,实现对分布式通信感知无人机的灵活控制和管理,提升系统的整体通信感知性能。
2 关键技术
为实现无人机通信感知一体化,需要突破通信感知一体化波形设计、波束成形和波束追踪,以及资源分配和轨迹规划等关键技术。
2.1 适配无人机的通信感知一体化波形设计
波形设计是通信感知一体化技术的重要组成部分。通信感知的设计原则和目标不同,使得现有波形难以适配无人机对通信感知一体化的需求。根据复用方式的不同,目前的通信感知一体化波形可分为通信感知复用波形和通信感知一体化波形。通信感知复用波形设计方案示意图如图2所示,前者主要采用时分复用或频分复用的方式,为通信和感知功能分配相互正交的资源,资源利用率较低。而后者的研究还处于起步阶段,主要包括基于正交频分复用(orthogonal frequency division multiplexing,OFDM)的一体化共用波形和基于正交时频空间(orthogonal time frequency space,OTFS)的一体化共用波形[8-10]。然而目前的通信感知一体化波形设计方案往往仅针对特定的场景,与无人机的适配性较差。此外,无人机的一些固有特性,如无人机的移动性等,与通信感知一体化波形的设计相互耦合,进而加大了一体化波形的设计难度。
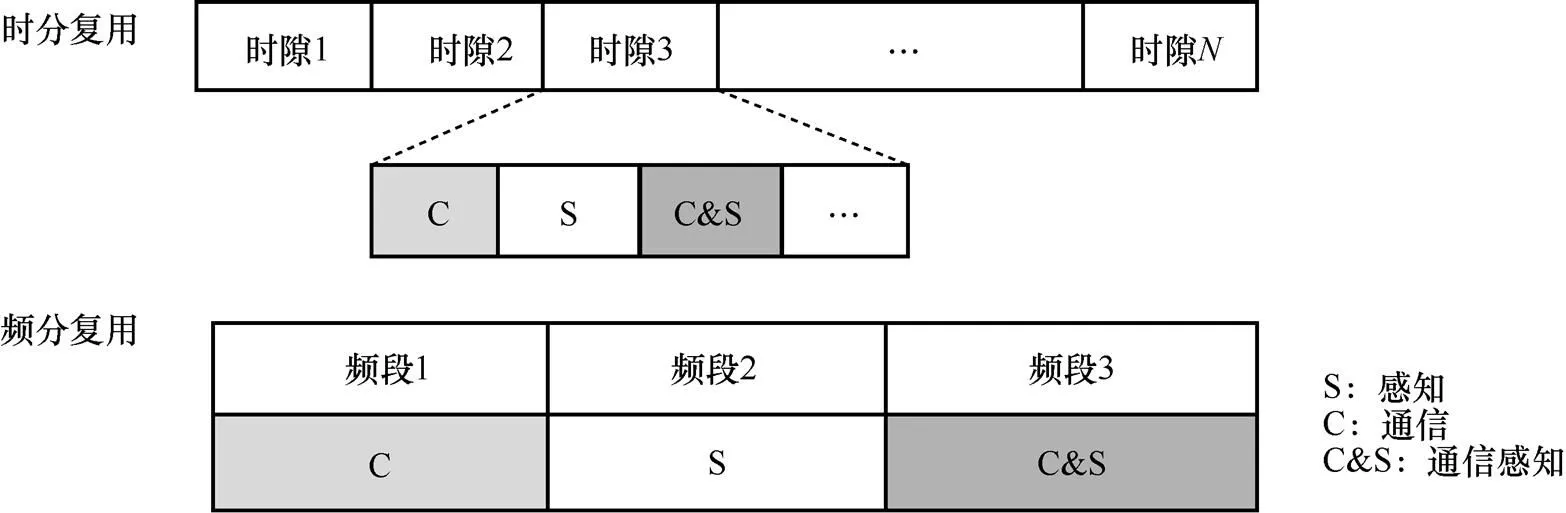
图2 通信感知复用波形设计方案示意图
因此,亟须研究一种适配于无人机的通信感知一体化波形,综合考虑无人机的移动性对通信和感知性能的影响,明确设计指标,包括最大用户服务数量、最大感知范围、感知精度以及资源开销等,进一步明晰适配于无人机通信感知一体化的波形设计方案。明确该方案的关键参数,进而优化无人机通信感知一体化的通信和感知性能。
2.2 波束成形和波束追踪
无人机感知的一个重要任务是实现对地面用户或非通信实体的方位角探测和位置估计,这对波束成形和波束跟踪技术提出了更高的要求。一方面,现有的波束成形技术依赖于完美的信道状态信息(channel state information,CSI),然而在实际系统中由于干扰、噪声等因素,信道估计的误差难以避免,提高信道估计的准确度往往需要消耗更多的导频资源。因此,如何设计一种基于不完美CSI的信道估计与波束成形方案仍需要进一步研究;另一方面,无人机和用户的移动性也会增加波束成形的难度。具体地,对于移动速度较快的地面用户,如地面车辆,为了实现实时的波束追踪,需要频繁地进行信道估计,更新信道状态信息,进一步增大了导频的开销,无人机的抖动等因素也会影响信道估计的准确性,进一步加大了波束成形的难度。此外,波束成形往往依赖于多天线技术,需要对高维参数进行优化设计,增大了优化算法的复杂度。为此,亟须研究一种导频开销小、复杂度低的波束成形方案,以满足无人机对移动性的需求。
2.3 资源分配和轨迹规划
传统的无人机资源分配和轨迹规划方案仅关注提升通信性能,无人机通信感知一体化则需要考虑无人机的环境感知能力,这为资源分配方案的设计和无人机的灵活部署带来了新的挑战[11]。首先,目前的通信感知联合性能指标不明确,缺乏对通信和感知性能的联合评估体系,使得资源分配的优化目标多聚焦于通信或感知,维度单一,难以适配无人机通信感知一体化对通信感知的联合性能优化需求;另一方面,引入感知功能往往需要额外的系统开销,且需要考虑更多与感知相关的系统参数,如参数估计误差、感知分辨率等,进而增加了资源分配方案的设计难度。在轨迹规划方面,无人机的位置和移动速度等因素会在一定程度上影响无人机的感知性能,如移动速度较快时带来的多普勒频偏会降低无人机的感知精度。因此,资源分配和轨迹规划设计流程如图3所示,亟须明确通信性能和感知性能的耦合关系和系统约束条件,并设计一种兼顾无人机复杂度和感知性能的资源分配和轨迹规划方案。
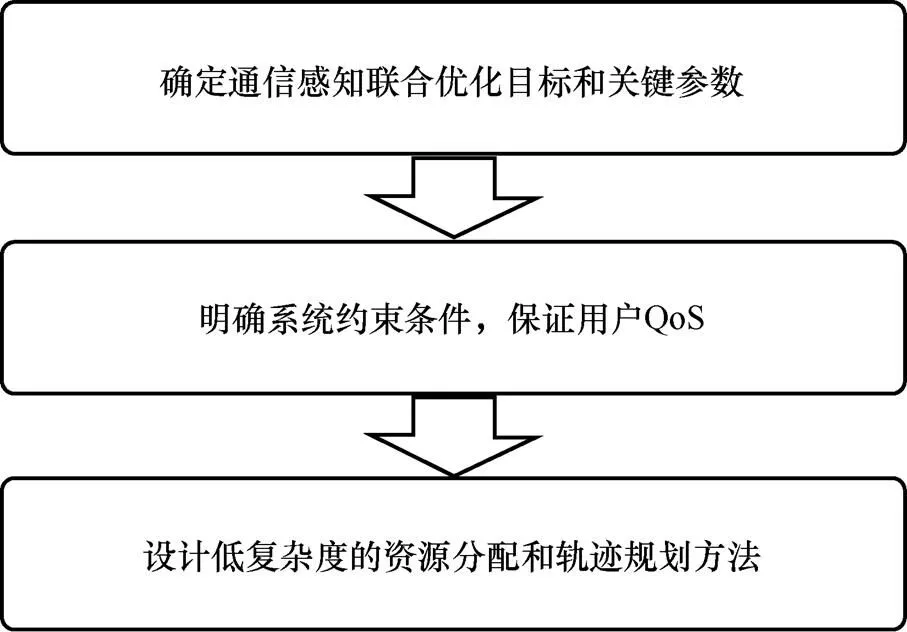
图3 资源分配和轨迹规划设计流程
3 未来展望
本节展望了无人机通信感知一体化的未来发展方向和挑战,包括AI驱动的无人机通信感知一体化、智能超表面辅助的无人机通信感知一体化及通信感知一体化辅助的无人机算力网络。
3.1 AI驱动的无人机通信感知一体化
随着智能车联网、AR/VR等智能业务的不断涌现,人工智能技术将成为未来6G的关键性赋能技术,并在无人机通信感知一体化中发挥重要的作用。一方面,感知能为人工智能技术采集更加丰富的训练数据,基于感知信息,人工智能技术能够训练出更加精确、更加适配当前环境的模型;另一方面,利用人工智能技术能实现感知数据的预处理和感知信息的智能融合,可为无人机带来更高的感知精度并扩展感知的范围。此外,无人机上部署的一些基于AI的环境预测算法,可以提高无人机的环境适应能力。然而,面向无人机通信感知一体化的人工智能技术还存在着诸多的挑战。首先,传统的人工智能技术计算复杂度高,对计算能力和存储能力都提出了更高的要求,难以适配机载资源有限的无人机场景,亟须设计低复杂度的人工智能算法。此外,无人机的高移动性也对其搭载的人工智能算法提出了更高的要求。具体地,无人机的灵活移动,使得环境信息时刻变化,为了避免机间碰撞,并为地面用户提供更加精准的通信感知服务,需要设计精确度较高的AI模型。
3.2 智能超表面辅助的无人机通信感知一体化
智能反射表面(intelligent reflecting surface,IRS)作为6G的潜在关键技术之一,在提升系统传输容量和感知性能方面表现出巨大的潜力。该技术能够通过对无线传输信道的灵活重构,扩展信号的覆盖范围,实现对盲区的覆盖和感知[12]。在通信感知一体化的无人机上部署IRS可以进一步提升无人机的通信和感知能力。具体地,虽然无人机具有强视距的特点,但由于局部地区物理环境的复杂性,其仍存在障碍物的遮挡问题,易形成通信和感知盲区,会严重影响无人机在该区域的通信和感知性能。智能超表面辅助的无人机通信感知一体化示意图如图4所示,搭载IRS可以提高无人机对无线环境的适应能力,IRS通过对入射通信感知一体化信号的灵活调整,实现无人机对盲区的感知和覆盖。此外,作为一种无源或半无源的器件,IRS为无人机带来性能增益的同时,对能耗的要求较低,进一步提升了系统的能量效率。然而,在通信感知一体化的无人机上部署IRS仍面临许多挑战,如无人机的抖动会对IRS相移矩阵的设计带来困难,降低了IRS所带来的性能增益。此外,IRS需要对发射端波束和IRS半无源波束等多种不同波束进行联合设计,增大了信道估计和波束成形的设计难度。
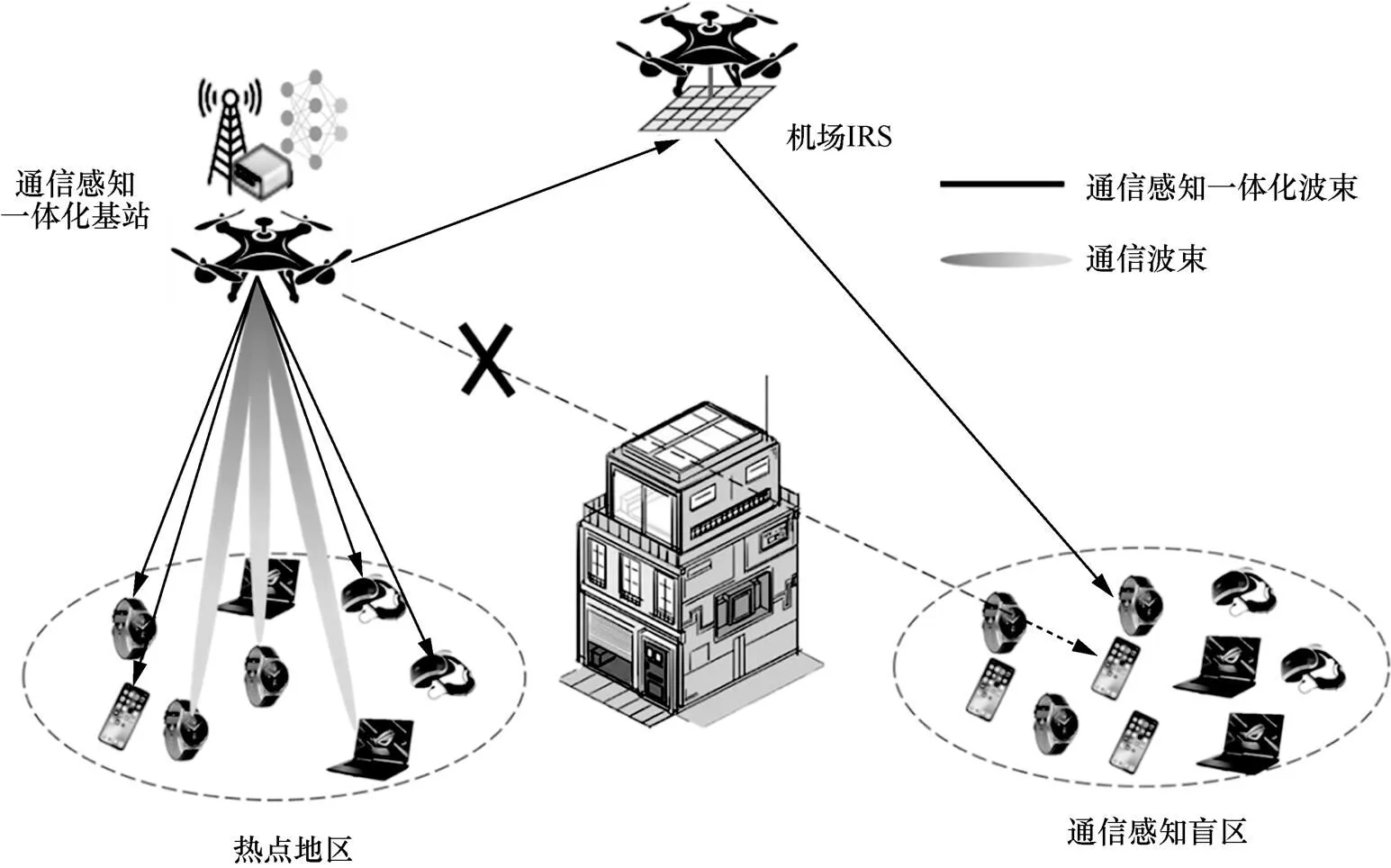
图4 智能超表面辅助的无人机通信感知一体化示意图
3.3 通信感知一体化辅助的无人机算力网络
随着未来通信系统对算力需求的不断增加,用户设备的本地计算资源将不足以支撑各类智能化业务,如AR/VR业务。一种潜在的设计方案是将计算资源部署到网络边缘,为用户提供边缘缓存与计算服务[13]。基于未来通信系统的这一发展趋势,无人机在通信和感知的基础上,还需要引入计算能力。通信感知一体化辅助的无人机算力网络示意图如图5所示,可在无人机上同时搭载边缘计算服务器和通信感知一体化基站,构建通-感-算互利共惠的无人机体系架构。该架构不仅能够为用户提供通信、感知服务,还能进一步缓解用户的本地计算压力。值得一提的是,这里的感知不仅包括无线感知,还将扩展到用户的算力感知和算力需求感知。无人机将对用户在空间上的业务分布进行感知和分析,明确热点地区的分布情况,并对不同区域用户所需的算力进行预测和判断。基于此,对不同算力的无人机进行智能化部署,实现无人机通信感知一体化的灵活算力调配,以满足未来各类智能化业务对算力的需求。然而,通信感知一体化辅助的无人机算力网络仍面临一些挑战。首先,目前算力和通信感知性能的耦合关系不明确,缺乏算力和通信感知性能的联合设计指标,需要进一步明确二者的联合性能指标和关键参数,并制定联合通信感知性能的算力调度方案;其次,现有的感知方案多聚焦于对用户位置的感知,缺少对用户算力需求的感知方式,如何对地面的算力需求进行感知仍需要进一步探讨;最后,目前的计算卸载方案局限于地面边缘计算网络,边缘计算节点位置固定,难以满足无人机的移动性和灵活部署的需求,亟须设计一种通信感知一体化辅助的无人机网络算力调配方案,权衡无人机的感知、通信和计算能力,提升无人机的资源利用率和整体性能。
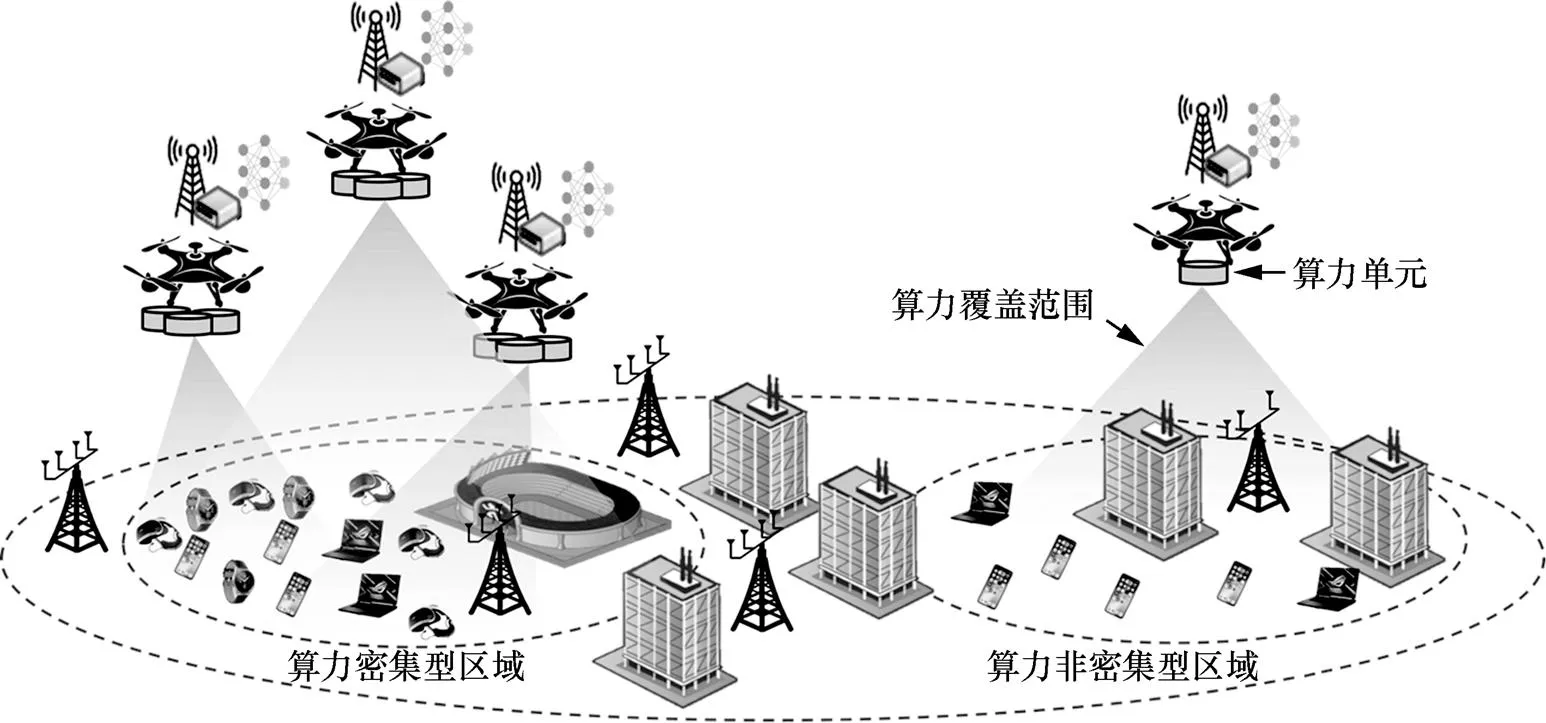
图5 通信感知一体化辅助的无人机算力网络示意图
4 结束语
本文提出了一种无人机通信感知一体化体系架构,探讨了实现该体系架构的基本原理和其中通信感知性能的折中关系。在此基础上,明确了利用无人机实现通信感知一体化需要突破的关键技术。最后,对无人机通信感知一体化的未来发展方向及挑战进行了展望。
[1] MOZAFFARI M, SAAD W, BENNIS M, et al. A tutorial on UAVs for wireless networks: applications, challenges, and open problems[J]. IEEE Communications Surveys & Tutorials, 2019, 21(3): 2334-2360.
[2] WU Q Q, XU J, ZENG Y, et al. A comprehensive overview on 5G-and-beyond networks with UAVs: from communications to sensing and intelligence[J]. IEEE Journal on Selected Areas in Communications, 2021, 39(10): 2912-2945.
[3] HU S Y, YUAN X, NI W, et al. Trajectory planning of cellular-connected UAV for communication-assisted radar sensing[J]. IEEE Transactions on Communications, 2022, 70(9): 6385-6396.
[4] MENG K T, WU Q Q, MA S D, et al. UAV trajectory and beamforming optimization for integrated periodic sensing and communication[J]. IEEE Wireless Communications Letters, 2022, 11(6): 1211-1215.
[5] JIANG W W, SHEN C, AI B. UAV-assisted sensing and communication design for average peak age-of-information minimization[C]//Proceedings of 2022 IEEE International Conference on Communications Workshops (ICC Workshops). Piscataway: IEEE Press, 2022: 1005-1010.
[6] LYU Z H, ZHU G X, XU J. Joint maneuver and beamforming design for UAV-enabled integrated sensing and communication[J]. IEEE Transactions on Wireless Communications, 2022(99): 1.
[7] 彭木根, 刘喜庆, 刘子乐, 等. 6G通信感知一体化理论与技术[J]. 控制与决策, 2023, 38(1): 22-38.
PENG M G, LIU X Q, LIU Z L, et al. Principles and techniques in communication and sensing integrated 6G systems[J]. Control and Decision, 2023, 38(1): 22-38.
[8] 姜大洁, 姚健, 李健之, 等. 通信感知一体化关键技术与挑战[J]. 移动通信, 2022, 46(5): 69-77.
JIANG D J, YAO J, LI J Z, et al. Key technologies and challenges for integrated sensing and communication[J]. Mobile Communications, 2022, 46(5): 69-77.
[9] 江甲沫, 韩凯峰, 徐晓燕. 6G通信感知一体化系统的性能指标[J]. 中兴通讯技术, 2022, 28(5): 39-45.
JIANG J M, HAN K F, XU X Y. Performance metric for 6G integrated sensing and communication system[J]. ZTE Technology Journal, 2022, 28(5): 39-45.
[10] 李国琳, 郭文彬. 雷达通信一体化波形设计综述[J]. 移动通信, 2022, 46(5): 38-44.
LI G L, GUO W B. Waveform design for integrated radar and communication: a survey[J]. Mobile Communications, 2022, 46(5): 38-44.
[11] MU J S, ZHANG R H, CUI Y H, et al. UAV meets integrated sensing and communication: challenges and future directions[J]. IEEE Communications Magazine, 2023(99): 1-7.
[12] LIU C X, HU X L, PENG M G, et al. Sensing for beamforming: an IRS-enabled integrated sensing and communication framework[C]//Proceedings of ICC 2022 - IEEE International Conference on Communications. Piscataway: IEEE Press, 2022: 5567-5572.
[13] 刘晨熙, 刘炳宏, 张贤, 等. 面向智能服务的雾无线电接入网络:原理、技术与挑战[J]. 智能科学与技术学报, 2021, 3(1): 10-17.
LIU C X, LIU B H, ZHANG X, et al. Intelligent service oriented fog radio access network: principles, technologies and challenges[J]. Chinese Journal of Intelligent Science and Technology, 2021, 3(1): 10-17.
The National Key Research and Development Program of China (No.2021YFB2900200), The National Natural Science Foundation of China (No.62001047), The Young Elite Scientists Sponsorship Program by China Institute of Communications (No.YESS20200064)
UAV-enabled integrated sensing and communication:architecture, techniques, and future vision
LIU Chenxi, MA Rui, PENG Mugen
Beijing University of Posts and Telecommunications, School of Information and Communication Engineering, Beijing 100876, China
UAV emergency communication has been regarded as a typical application of the sixth generation mobile communication system (6G), and it can be flexible deployed and provide on-demand services. Meanwhile, integrated sensing and communication (ISAC) is a key feature and enabling technology for 6G. With the aid of the ISAC techniques, the spectral efficiency and the sensing accuracy of UAV emergency communication can be improved, while the system costs can be simultaneously reduced. However, how to efficiently integrate the ISAC techniques into the UAV emergency communication remains a hot and challenging research issue for both the academia and industry. Against these backdrops, a UAV-enabled ISAC architecture was proposed. Then, the fundamental principles that supported the proposed architecture were discussed. Finally, the future directions and challenges in UAV-enabled ISAC were provided.
integrated sensing and communication, unmanned aerial vehicle communication, intelligent service
TP393
A
10.11959/j.issn.1000–0801.2023029

刘晨熙(1989-),男,博士,北京邮电大学信息与通信工程学院副研究员、博士生导师,主要研究方向为无人机通信感知一体化网络。
马睿(1996-),男,北京邮电大学信息与通信工程学院博士生,主要研究方向为无人机通信感知一体化网络。

彭木根(1978− ),男,博士,北京邮电大学信息与通信工程学院院长、教授、博士生导师,网络与交换技术国家重点实验室副主任,IEEE Fellow,中国电子学会会士,中国通信学会会士。主要研究方向为智简无线网络、空天地海一体化网络、通信感知计算融合等。担任《电信科学》副主编,期刊指导委员会委员,、、等期刊的编委等。
专题策划人:彭木根
2023-01-15;
2023-02-07
国家重点研发计划项目(No.2021YFB2900200);国家自然科学基金资助项目(No.62001047);中国通信学会青年人才托举项目(No.YESS20200064)
