基于不同量测数据融合的配电网状态估计研究
2023-03-10王海波吴升涛周文海翟文化蔡浩宇
王海波 吴升涛 周文海 翟文化 蔡浩宇
(国网嘉兴供电公司,浙江嘉兴 314000)
0 引言
状态估计算法主要通过增加数据的冗余度来提高状态估计的准确度,因此,状态估计也被称为滤波[1]。传统的状态估计主要用于输电网,而在配电网中应用相对较少,直到最近几年,配电网的状态估计才受到研究人员的广泛关注。但是,配电网不同于输电网络,有其自身的特点,如三相不对称。因此,输电系统的状态估计并不适用于配电网[2],有必要对配电系统的状态估计进行有针对性的研究。
随着配电自动化技术的发展,配电网的测量设备逐渐增多。在传统的SCADA 测量系统的基础上,PMU也被应用于配电网,且数据精度越来越高。文献[3]提出了一种基于高精度PMU 测量数据的配电网系统状态估计方法,但文章并没有具体说明该方法构建的细节。文献[4]重点介绍了高精度PMU 数据对状态估计的作用,分析了极坐标系和直角坐标系下状态估计的优缺点,结果表明,PMU 数据提高了配电网状态估计的准确性。一般来说,最好选择直角坐标系进行求解。文献[5]认为,未来配电网中会有PMU 测量系统,利用该高精度系统数据优化方案后,可使状态变量的误差变得更小,从而达到提高估计精度的目的。然而,这样在配电网中就会存在两种不同体系的数据。一般情况下,SCADA 数据精度不够,没有时间标记,数据刷新频率低;PMU 数据精度高,而且数据刷新频率也较高,但配电网安装数量较少。如果不进行处理,配电网状态估计的效果将大大降低,但目前这方面的研究还相对较少。
文献[6]考虑了不同测量设备传输过程中时间断面不一致的问题,因此使用时延误差来补偿由通信时延引起的误差,解决了由时间断面不一致引起的问题,最终也提高了状态估计的精度。文献[7]中采用曲线拟合的方法弥补了测量系统数据刷新频率低的问题,但数据精度有待提高。文献[8]主要考虑了PMU 数据对状态估计精度的影响,但没有提到不同系统之间的数据差异。文献[9]考虑了PMU 数据和SCADA 数据的融合,采用了混合状态估计算法,但对于时间断面不一致的问题,没有提出有效的解决方案。
基于上述研究,本文首先分析了SCADA 和PMU 数据的不同特点;然后根据它们之间的具体差异,从数据精度、时间断面、数据刷新频率三个方面给出了相应的解决方案;最后,基于配电网三相线路模型,主要考虑数据融合的问题,采用支路电流法估计配电网状态。
1 SCADA 数据与μPMU 数据特性分析
在这里说明一下,在配电网中所配置的PMU 一般被称为μPMU,基本原理与PMU 相同,所以后续本文将以μPMU 进行叙述[10]。下面将对SCADA 数据[11]与μPMU数据[12]的不同特性进行分析。
SCADA 数据主要包括三相电压幅值、三相电流幅值与三相功率数据,上传数据的频率在秒级水平,数据精度较高,但是没有时间标记。μPMU 数据主要包括三相电压与电流相量数据,数据精度比SCADA 数据高,上传数据的频率在毫秒级水平,且有时间标记。由此可以看出,两种量测数据之间存在很大的不同,在进行状态估计时,需要对这些数据进行相应的处理,从而更好地适应配电网状态估计的需要。
2 两种系统数据融合分析
2.1 数据精度融合方法分析
众所周知,SCADA 系统数据的准确性要低于μPMU系统的数据,因此在混合有两种不同体系数据的配电网系统中进行状态估计时,“权重系数法”是使用最广泛的方法,即根据不同系统的数据分布误差,将误差方差的倒数作为该系统数据的权重,在此不再赘述[13]。
2.2 时间断面数据融合方法分析
在进行某一时刻的系统状态估计时,需要输入该时刻的量测数据,包括SCADA 系统的测量数据和μPMU系统的测量数据。但前者的测量数据没有被打上时间戳,所以就无法获得SCADA 数据的准确时间,那么状态估计结果的精度仅仅依靠带有时标的μPMU 系统数据将会大打折扣。
针对上述情况,本文将以毫秒级水平上传数据的μPMU 系统的实际上传频率为参考,假定为10个毫秒,即10 ms上传一次数据。通过分析,笔者认为在如此短的时间区间内,且电力系统处于正常运行状态下,上传的数据发生异变的概率非常低。
在计算机技术中存在一种缓冲区的概念,即在计算机中由于存在高速传输组件及低速传输组件,这两种组件的数据传输速率不一致,所以计算机中往往会设置一个用于临时存储高速数据的空间,这就是所谓的缓冲区。
基于上述分析,考虑到要为SCADA 测量数据打上时标,并且在同一时间断面上要保证既有μPMU 测量数据,也有SCADA 测量数据。据此,本文引入了所谓“时间缓冲区”的概念,来为SCADA 数据打上时标。具体做法是,以10 ms上传一次数据的μPMU 数据作为参考,将其数据上传时刻作为起点,10 ms为一个时间间隔,即缓冲区。在这个缓冲区内出现SCADA 上传数据,就将其打上μPMU 数据的时标,同时也保证了两者的数据在一个时间断面上。
如图1所示,SCADA 数据在μPMU 数据所设置的10~20 ms的缓冲区间内出现,根据前述分析,在缓冲区内可以认为数据没有变化。那么,在μPMU 上传时刻的SCADA 数据与缓冲区真实上传的SCADA 数据基本一致,所以认为上传的SCADA 数据上传时间在10 ms处。
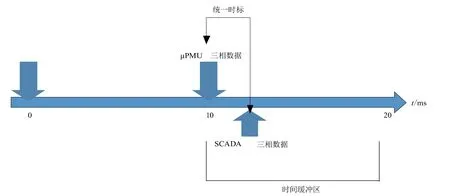
图1 添加SCADA 三相数据时标并保持时间断面一致的方法
2.3 数据刷新频率融合方法分析
考虑到两种系统的数据上传频率存在差异,上传频率为秒级别的SCADA 数据和上传频率为毫秒级别的μPMU 数据,在一个时间段内,可以明显看出两者上传的数据在数量上的差异。即在SCADA 数据两次上传的时间区间内,μPMU 数据已经大量上传到系统内。但单靠这些数据又无法进行状态估计,这就造成了巨大的数据浪费,致使系统调度人员不能更精准地掌握系统状态信息。
如图2所示,2 s上传速率的SCADA 系统数据与10 ms上传速率的μPMU 数据,存在巨大的数量差异。
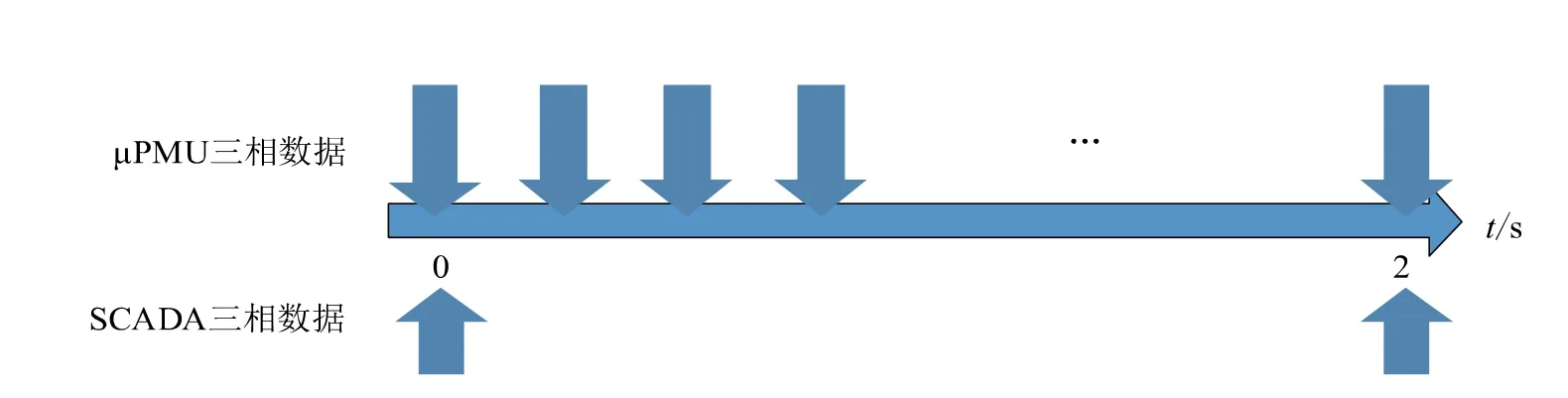
图2 SCADA 数据与μPMU 数据上传速率差异
基于上述分析,电力系统运行在正常工况下,且负荷也处于稳定变化的情况下,如相关负荷数据处在秒级别的时间区间内,在此条件下,本文认为数据特性应当是稳定且线性变化的,比如在2 s的时间间隔内。所以,可以利用线性变化规律来处理数据上传频率不一致的问题。
本文分析认为目前解决线性问题的主要方法有拉格朗日低次线性插值算法,简称插值方法,在此将其应用于状态估计数据频率融合中。该插值方法主要对数据进行拟合,以获取数据的变化规律。通常做法是对数据进行分段线性拟合,即把数据点按某一规律划分成一个个小区间,以区间为单位进行拟合,这样会得到较高的拟合精度。
一般情况下,内插方法和外插方法是该算法的两个主要方向,但这两个方向的应用场景有所不同。对区间外部数据进行分析拟合一般用外插算法,对区间内部数据进行分析拟合一般用内插算法。本文将根据这些特点,综合利用这两种方法,分析改善状态估计效果的方法。
2.3.1 频率融合的内插方法
如图3所示,为了获取较好的插值效果,当插值区间T2变为插值区间T1时,可以看到X1明显比X2更加靠近X。因此,较小的插值区间带来的是更好的拟合效果。
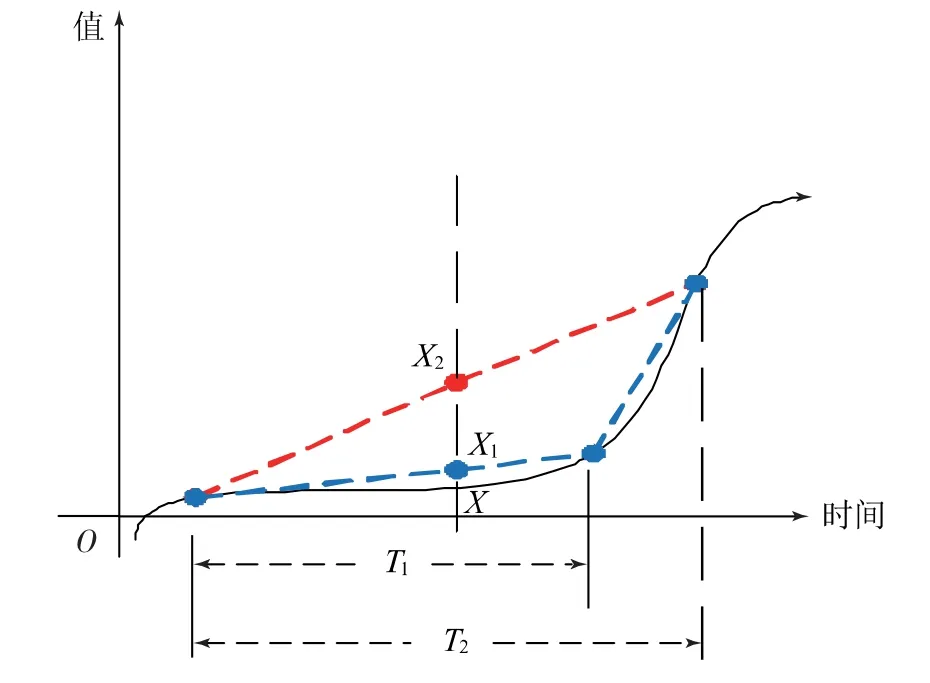
图3 内插法分析示例
在本文实际分析中,2 s是SCADA 数据的最小上传速率,那么就将SCADA 数据的插值区间设置为2 s。具体的SCADA 数据插值公式如式(1)所示:
式中:φ为相序号;Tinsert为目标插值时间点;Tzone1为插值区间的首端时间点;Tzone2为插值区间的末端时间点,且Tzone1<Tinsert<Tzone2;M为在上述相关脚标下的值。
2.3.2 频率融合的外插方法
通过分析发现,对当前时间断面或者未来时间断面进行状态估计,内插法可能无法弥补前述时间断面缺失的SCADA 数据,状态估计也将无法有效运行。针对此种情况,本文利用外插法进行分析计算,方法如图4所示,通过插值区间T来获取未来某一时刻的X值近似的X1值。
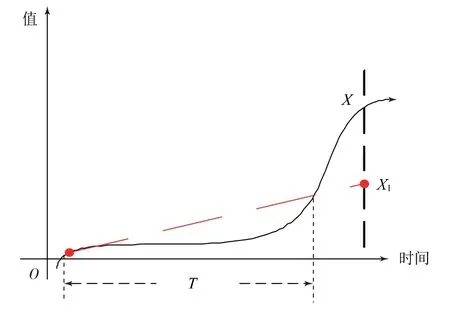
图4 外插法分析示例
基于此,利用外插法来补足该场景下所缺少的SCADA 测量数据,进而解决刷新频率融合问题。具体的SCADA 数据插值公式如式(2)所示:
式中:Tinsertzone1为插值区间的首端时间点;Tinsertzone2为插值区间的末端时间点,且Tinsertzone1<Tinsertzone2<Tinsert;M为在上述相关脚标下的值。
3 数据融合下的配电网状态估计分析
加权最小二乘法是本文状态估计主要方法,状态变量选用支路电流幅值与相角,从而利用支路电流法构建状态方程,并进行状态估计求解计算[14]。
进行配网状态估计,需要计及三相不对称。基于此,支路阻抗矩阵如式(3)所示:
式中:Zaa、Zbb、Zcc为线路自阻抗;Zab=Zba,Zca=Zac,Zbc=Zcb为线路互阻抗。
此外,为了加快状态估计速度,本文简化了配网三相不对称模型,即不考虑互阻抗对配网线路的影响,只考虑配网三相自阻抗。基于此,得到简化后的配网支路阻抗矩阵如式(4)所示:
综合分析,建立数据融合下的配电网状态估计方法,其基本流程如下:
步骤1,从SCADA 系统与μPMU 系统读取数据,并为SCADA 数据添加时标、统一时间断面;
步骤2,若SCADA 系统未上传数据,则利用插值分析方法填补数据;
步骤3,初始化状态估计的初值,整理相关网络参数数据,为状态估计做准备;
步骤4,利用加权最小二乘法求解状态变量的迭代值;
步骤5,利用状态变量迭代值更新状态量;
步骤6,判断状态变量的迭代值是否满足收敛要求,即迭代值是否小于收敛值且迭代次数k是否小于等于最大迭代次数maxnum,若满足则输出状态量,若不满足则继续步骤4,或者得出状态估计不收敛的结果。
4 算例分析
综上所述,本文利用IEEE 33节点系统平台进行仿真算例研究。详细步骤如下:利用潮流计算方法对仿真系统进行计算,获取50 s时间内的相关潮流结果。考虑到现实条件,假设μPMU 上传频率为1 s(实际为毫秒级),SCADA 数据上传频率为10 s(实际为2 s)。随后,为验证本文插值方法的有效性,将某一节点设置为SCADA 系统的测量装置,并将该点50 s潮流结果作为其真实值,最后以10 s为一个时间区间进行仿真插值计算,并分别以外插法和内插法进行验证,得到的结果如下。
4.1 内插法仿真分析
利用内插法进行插值求解,获取仿真结果,即全量测值与插值仿真之间的效果。在此对仿真节点的A 相有功负荷进行了分析,分析结果如图5所示。

图5 A 相有功负荷内插分析
4.2 外插法仿真分析
通过外插法同样进行了上述仿真分析,同样对相关节点A 相有功负荷进行分析,获取的仿真结果如图6所示。
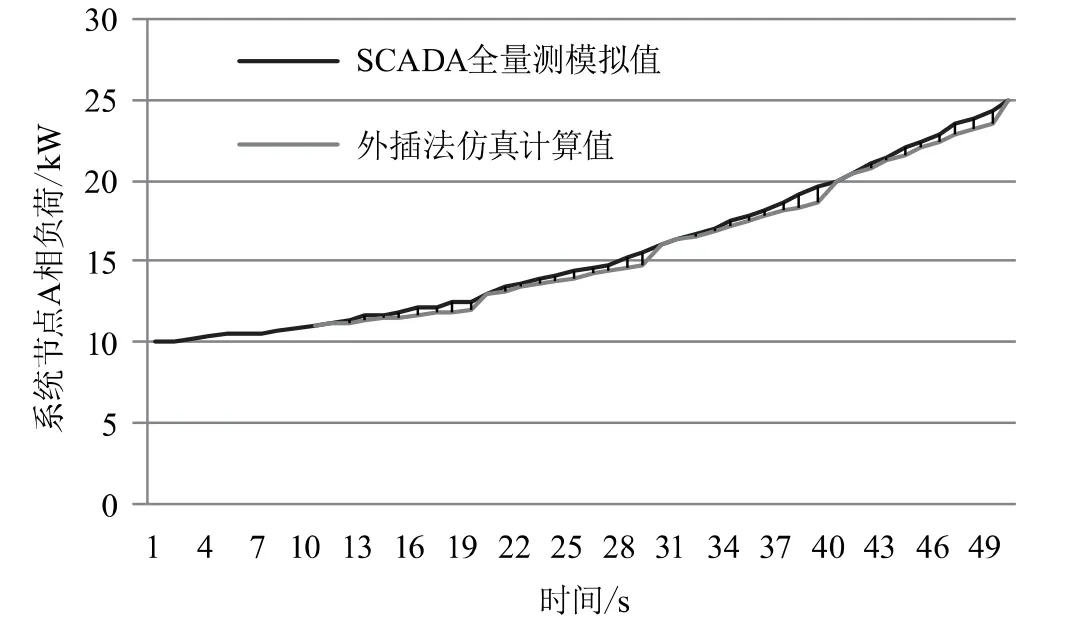
图6 A 相有功负荷外插分析
4.3 状态估计仿真分析
从上述结果可以看出,内插法的精度要高于外插法,所以本文利用内插法所得数据进行状态估计计算。
在IEEE 33节点系统中,节点4、6、8、12、17、19、23配置μPMU 量测系统,其余节点配置SCADA 量测系统。其中μPMU 的测量量添加标准差为0.1% 的正态分布误差,SCADA 的测量量添加标准差为1% 的正态分布误差。结果如图7所示,可见状态估计具有较高精度。

图7 数据融合下的状态估计分析
5 结语
通过对上述两种插值效果进行分析可以发现,内插法要明显优于外插法。此外,通过量化计算可以得知,内插法计算得到的有功负荷的平均误差为0.5%,而利用外插法计算得到的有功负荷的平均误差为2% 。据此分析,外插法在精度方面要劣于内插法。本文通过研究认为,这主要是由于内插法分析对象是在已知的趋势基础上进行的,而外插法则基于数据的未知趋势来进行分析计算。但正因如此,内插法和外插法各有优劣,从而本文认为可以将它们结合起来进行运用,即在进行状态估计时,首先利用外插法进行当前或未来时间断面的计算,然后利用高精度的内插法对外插法的结果进行修正、循环计算,就可以提高相关数据的精度,而且状态估计值也可以得到计算与改善。
