月面大范围空间机动初步优化
2023-03-09吴胜宝胡冬生
任 宽,申 麟,李 扬,吴胜宝,胡冬生
月面大范围空间机动初步优化
任 宽,申 麟,李 扬,吴胜宝,胡冬生
(中国运载火箭技术研究院研究发展部,北京,100076)
月面大范围机动技术将是未来探索以及开发月球的关键技术之一,月面机动轨迹优化可以显著减少机动过程的燃料消耗。主要针对月面大范围机动轨迹进行初步优化,将整个机动轨迹分为上升段、自由漂浮段、第1次动力减速段、垂直动力着陆段,前面3个飞行阶段是对整个飞行任务的初制导,在达到飞行射程的同时使飞行终端满足垂直着陆段的降落要求,通过垂直着陆段修正初制导误差,使飞行器满足目标点精确着陆要求。首先,建立各个飞行阶段的运动学模型,将前3个飞行阶段作为一个轨迹优化问题,采用遗传优化算法对优化问题进行求解。另外,将垂直动力着陆段轨迹优化问题通过无损凸化和离散的方式转化为一个有限维的二阶锥凸问题,通过凸优化求解器求解以实现在线轨迹优化。仿真结果表明,采用的轨迹优化方法具有较高的任务适应性和鲁棒性,可以适应不同机动任务需求实现高精度垂直动力着陆。
月面大范围机动技术;机动轨迹优化;垂直动力着陆;凸优化
0 引 言
月球一直是载人探索最热门目标星球之一,美国在2017年正式宣布将重启登月计划并建立永久性月球基地,各国也纷纷将载人登月与月球开发作为未来航天发展的重点[1,2]。从人类发展角度来说,探索与开发月球是人类走出地球摇篮的必经之路,因此,研究月面大范围机动技术对未来开发月球、建立月球基地、探索月面空间运输及地月空间运输技术具有重要意义。
月面空间运输与地球空间运输有较大差别,月球引力只有地球的六分之一,同时,月球没有大气,不用考虑气动、气压对空间运输的影响。月面大范围机动轨迹设计与传统弹道设计有一定区别,需要考虑动力减速的过程,飞行任务终端需要满足较为严格的终端约束,包括位置和速度约束,同时,通常需要采用在线制导的方式以实现精确动力软着陆。
由于整个月面空间机动将会经历多个飞行阶段,所以月面机动轨迹优化应该是一个整体优化的过程,各个飞行阶段相互制约,相互影响,并且需要适应不同发射任务。本文主要研究中远射程(≥500 km)的月面机动轨迹优化,将整个机动轨迹分为4个阶段,分别是上升段、自由漂浮段、第1次动力减速段、垂直动力着陆段。根据月面机动各飞行阶段特性建立其动力学模型,将整个机动过程轨迹优化问题分为2个轨迹优化问题,分别是月面机动任务轨迹优化问题和终端垂直动力段在线轨迹优化问题。随后,针对几种飞行任务的机动轨迹优化问题进行了数值分析,同时考虑垂直着陆段初始状态偏差进行蒙德卡洛仿真分析,验证了轨迹优化算法的有效性及多任务适应性。
1 月面机动动力学模型
整个月面大范围机动轨迹如图1所示。
1.1 月面机动参考坐标系
为便于各个飞行阶段的动力学建模,本文采用图2所示的3组坐标系。
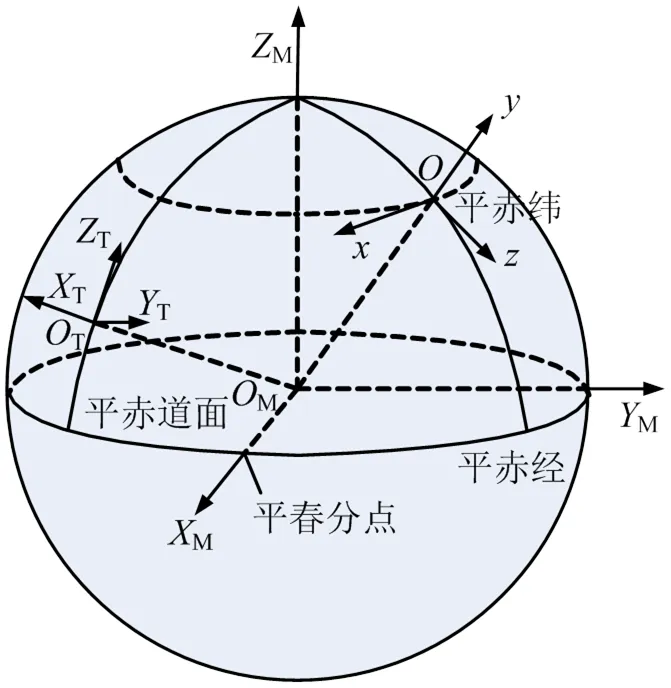
图2 月面机动坐标系示意
考虑到月球自转周期较长,忽略月球自转的影响,假设月球为匀质圆球,不考虑月球摄动以及地球引力的影响,假设飞行器在飞行过程中处于瞬时平衡状态。
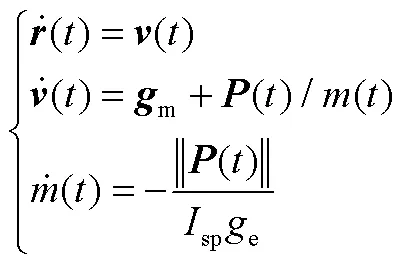
1.2 上升段
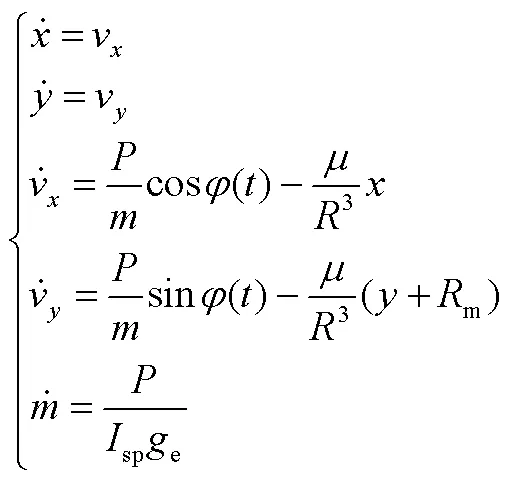
在月面大范围机动轨迹设计过程中,上升段是飞行器最初动力加速的阶段,上升段的终端参数决定了整个机动轨迹的射程。控制飞行器在发射平面内飞行,忽略侧向运动,建立发射坐标系下月面机动的动力学方程为
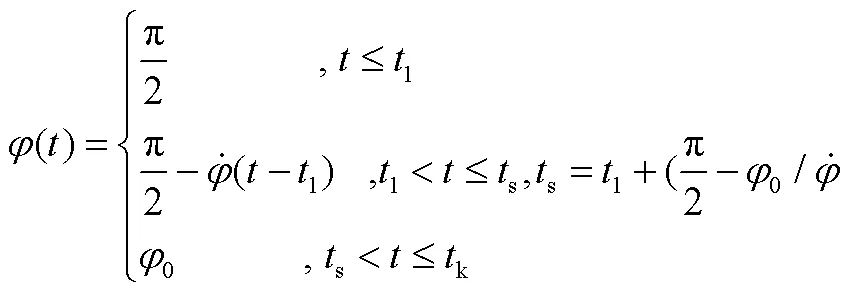
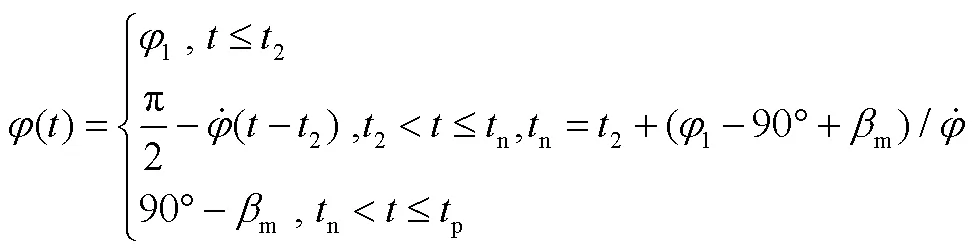
对于上升段轨迹,需设计的是俯仰程序角,一般将上升段轨迹分为垂直上升段、程序转弯段、瞄准段。
设计俯仰程序角表达式为
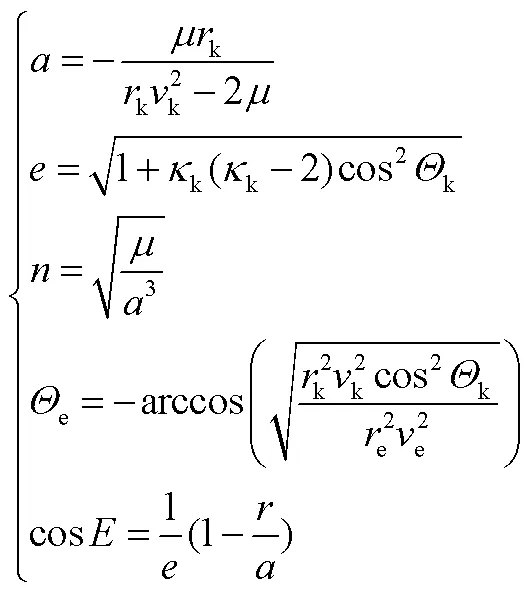
1.3 自由漂浮段
a)自由漂浮段射程计算。

因此,自由漂浮段的射程为
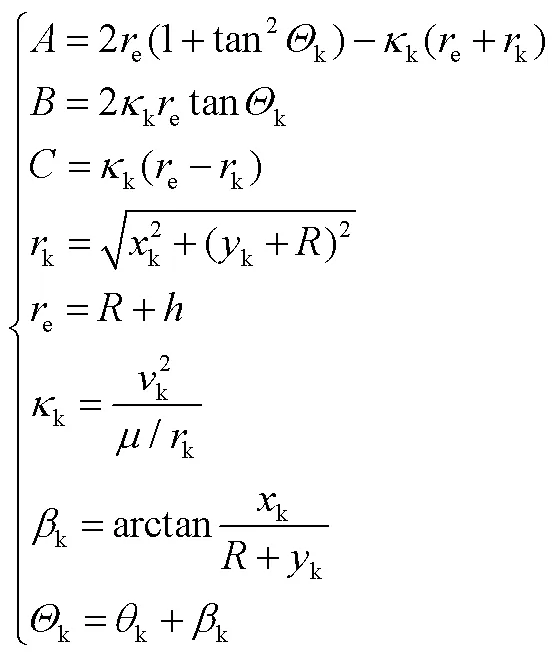
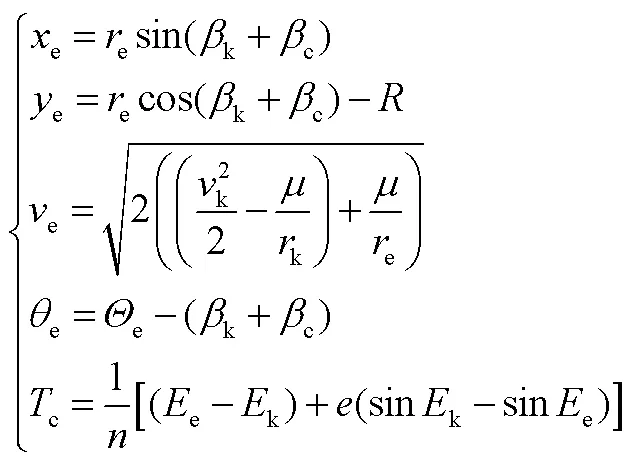
b)自由漂浮段段终端参数计算。
在发射坐标系下,自由漂浮段段终端参数为
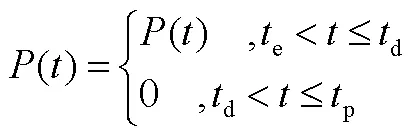
1.4 第1次动力减速段
第1次动力减速段是在自由漂浮段之后,开始动力减速,主要作用是在降低飞行器的飞行速度的同时对准目标点,使其终端的速度,速度倾角满足实现垂直动力软着陆的要求。第1次动力减速段在发射坐标系下的运动学方程与式(1)一样。但推力在发动机关机后为零,即:
对于第1次动力减速段,同样需要设计俯仰程序角,可将第1次动力减速段分为固定程序角减速段、程序转弯段、垂直下降段,如图3所示。
设计俯仰程序角表达式为
1.5 垂直动力着陆段
前3个飞行阶段设计采用跟踪标准轨迹的制导方法(即标称制导法),本文主要对月面机动任务标称轨迹进行优化,而最后垂直动力着陆段要求将飞行器精确地降落到目标点且终端速度接近于零。为了实现垂直动力着陆段在线精确制导,本文采用基于凸优化的在线制导方式,切换高度设置在2000 m,主要研究基于凸优化的在线轨迹优化方法。
2 月面机动任务轨迹优化



c)终端约束:
采用经典的四阶龙格库塔法对运动学方程积分以得到整个机动轨迹的终端参数,采用遗传算法对整个优化问题进行求解,将终端约束作为优化问题的非线性约束,控制优化变量使目标函数最小,同时,对遗传算法多次循环迭代避免陷入局部最优,最终得到优化后的机动轨迹。
3 垂直动力着陆段在线轨迹优化
垂直动力着陆段是飞行器着陆最后的修正阶段,要实现这一阶段的在线制导,首先需要研究的就是这一阶段的在线轨迹优化算法,对于在线轨迹优化算法,近年来以凸优化为基础的在线轨迹优化算法具备较强的可行性,本文在垂直动力着陆段轨迹优化采用无损凸化的在线轨迹优化算法。

a)推力大小约束。
推力大小不能超出发动机的可调节范围,即满足:
b)推进剂约束:
可用推进剂量满足如下约束条件:

c)地形约束:
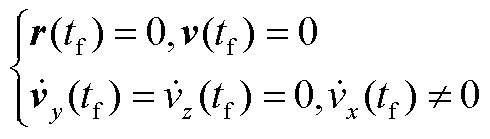
d)着陆终端约束:
着陆终端要求飞行器的位置、速度相对目标点偏差均为0。同时,要求着陆时水平横向和侧向加速度为0,考虑推力方向沿着飞行器轴向的假设,即要求降落姿态保持垂直。
参见文献[4],将非凸推力约束引入一个松弛变量进行无损凸化,可以将整个垂直动力着陆问题转化为凸优化问题,再将整个凸优化问题离散得到一个二阶锥凸问题(SOCP),具体推导过程见文献[4]和文献[7],这里直接给出得到的离散化的二阶锥凸优化问题。
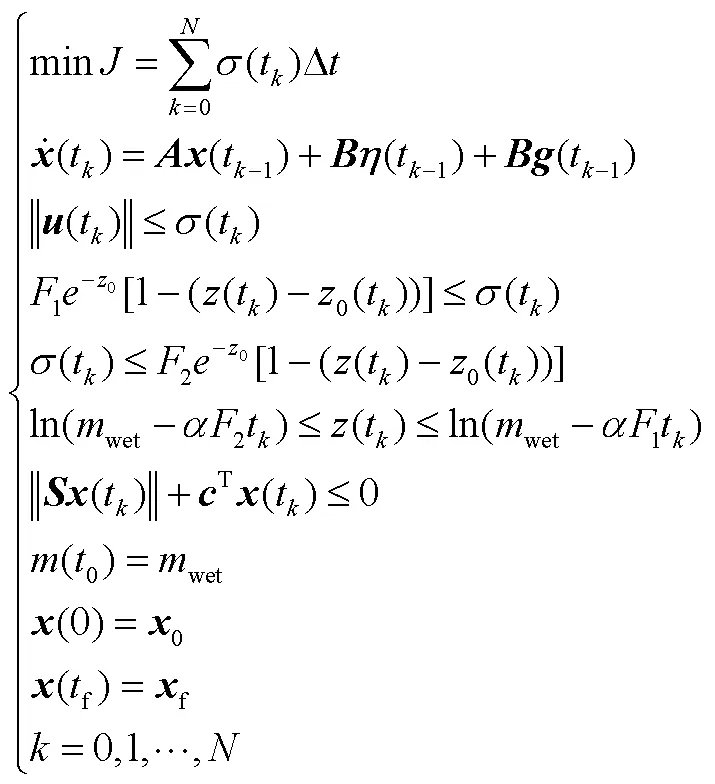
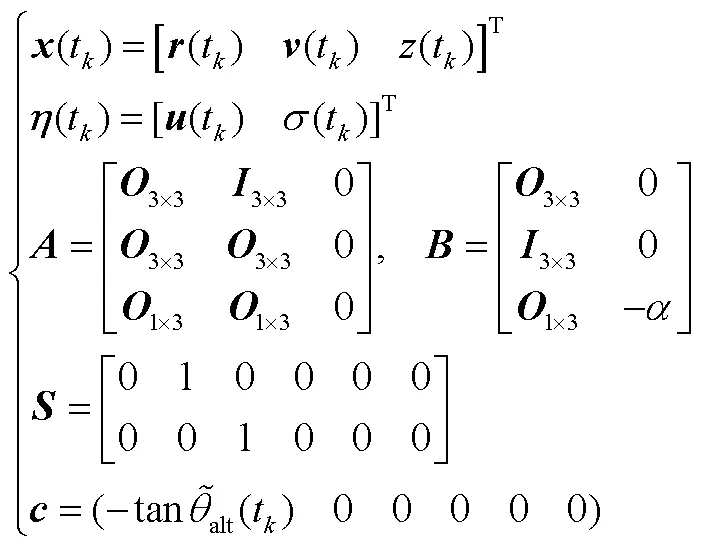
针对上述离散化的二阶锥问题,可以通过内点法求解器进行求解。
4 月面机动任务轨迹优化仿真
月面机动任务轨迹优化主要是针对飞行目标设计一条燃料消耗较少的机动轨迹,仿真考虑设置3种不同射程距离的飞行任务,具体的任务参数和仿真参数设置见表1,优化后的优化变量列于表2。
表1 机动轨迹优化仿真参数
Tab.1 Optimization Simulation Parameters of Maneuvering Trajectory
任务参数 飞行任务1 发射点经纬度/(°)(-138,-9.5)目标点经纬度/(°)(-53,32) 飞行任务2 发射点经纬度/(°)(-138,-9.5)目标点经纬度/(°)(-63,-51) 飞行任务3 发射点经纬度/(°)(-138,-9.5)目标点经纬度/(°)(-162,30) 弹道参数 垂直起飞时间/s5俯仰角速率/(°/s)5 终端最大速度m/s120终端高度/m2000 飞行器参数 起飞质量/t20干重/t7 比冲/s380额定工作推力/N100000 月球环境参数 月球引力常数4.904×1012月球半径R/km1738
表2 优化结果
Tab.2 Result of Optimization
优化变量飞行任务1飞行任务2飞行任务3 上升段关机时间t2/s269.173 0259.904 2237.993 1 上升段终端俯仰角/(°)23.155827.563435.6203 开机高度/m50 299.099 454 772.116 154 519.886 6
续表2

减速段固定俯仰角/(°)76.248 889.451 8108.050 6 固定程序角减速时间/s147.760 3144.416 0134.544 1 垂直动力减速时间/s0.594 71.094 10.070 34 轨迹终端参数 燃料消耗/kg11 617.527 511 268.734 910 240.213 4 终端速度/(m·s-1)119.503 2119.314 8119.305 0
飞行参数变化如图4至图6所示。
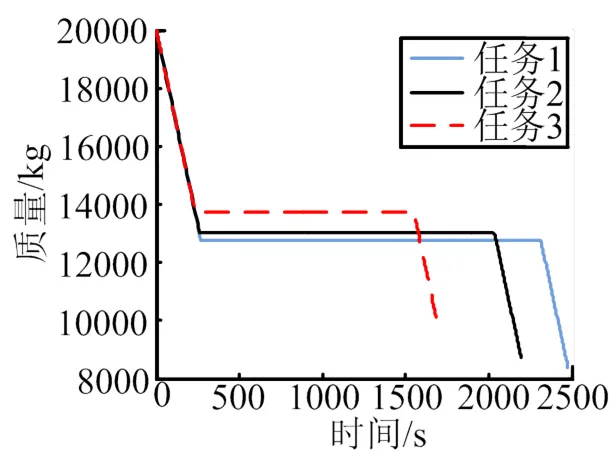
图4 质量变化
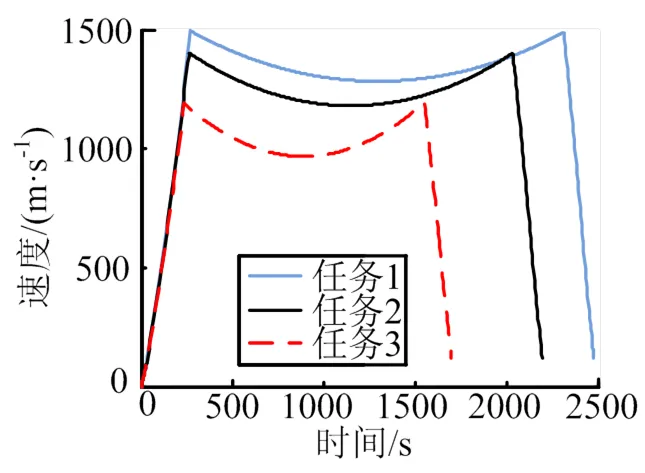
图5 速度变化
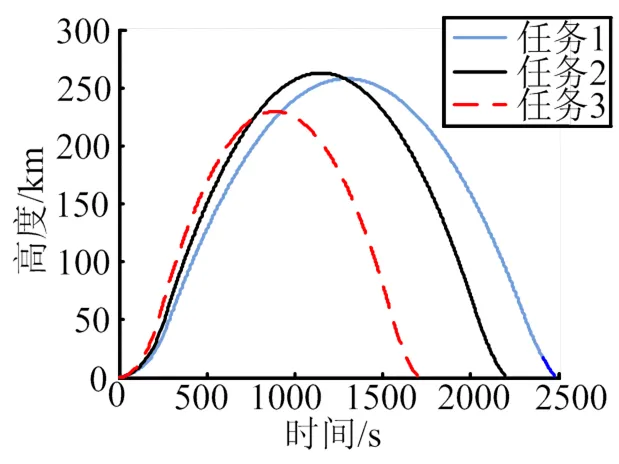
图6 高度变化
从仿真优化的机动任务轨迹可以看出,终端高度,速度,俯仰角均满足飞行任务终端约束,燃料消耗占总质量的58.09%(任务1),56.34%(任务2),51.20%(任务3)。从表2、图5对比不同射程飞行任务的轨迹优化结果发现,上升段终端速度随目标射程增大而增大,而上升段终端俯仰角随射程增大而减小。这是因为飞行器无动力滑行占据绝大部分射程,滑行时间主要由上升段纵向速度分量决定,当目标射程越短需要的上升段终端速度越小,俯仰角较大可以增大纵向速度分量,使得无动力滑行时间更长,飞行射程更远;而目标射程越长需要的上升段终端速度越大,只需较小的俯仰角就可保证足够的无动力滑行时间,更大的横向速度分量可以使得飞行器射程更远。
5 垂直动力着陆段在线轨迹优化仿真


表3 垂直着陆段轨迹优化仿真参数
Tab.3 Optimization Simulation Parameters of Vertical Landing rajectory
任务参数 目标位置/m[0;0;0]终端速度m/s[0;0;0] 最大斜坡角/(°)10最大推力/N100000 最小可调推力/N0.3最大可调推力/N0.8 飞行器参数 干重/kg7000比冲/s380 仿真参数 月球引力加速度/(m·s-2)1.618飞行时间/s35

图7 三维轨迹
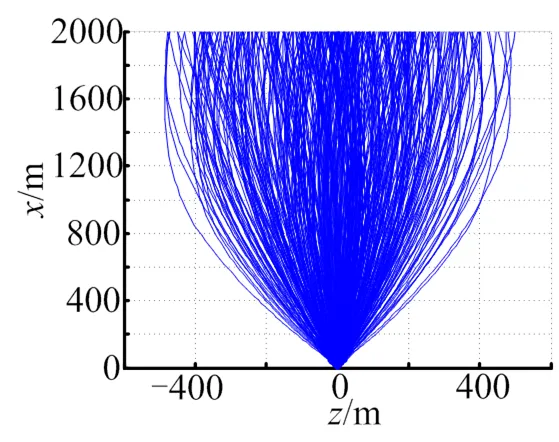
图8 x,z坐标变化
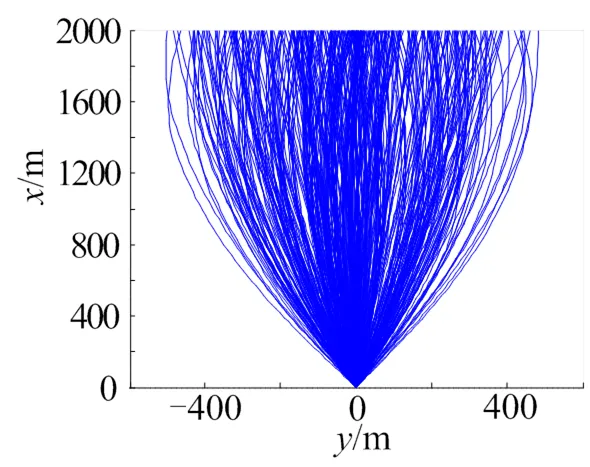
图9 x,y轴坐标变化
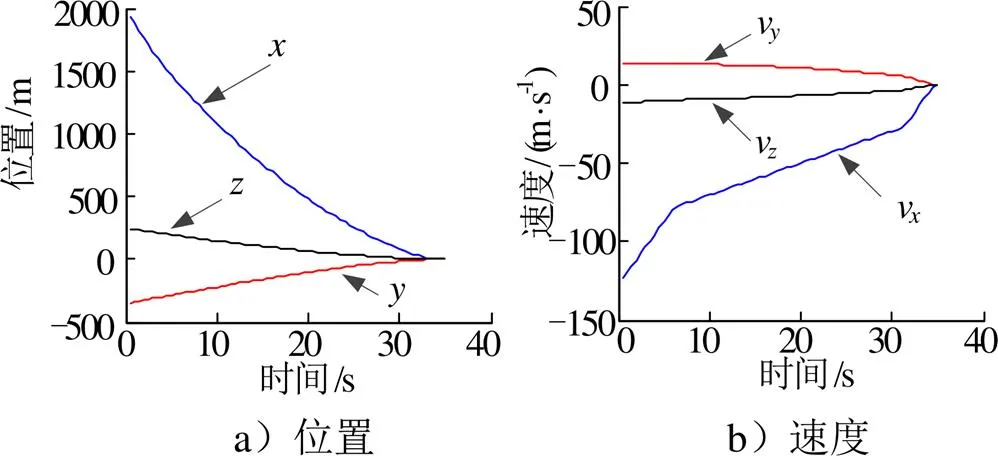
图10 位置和速度变化
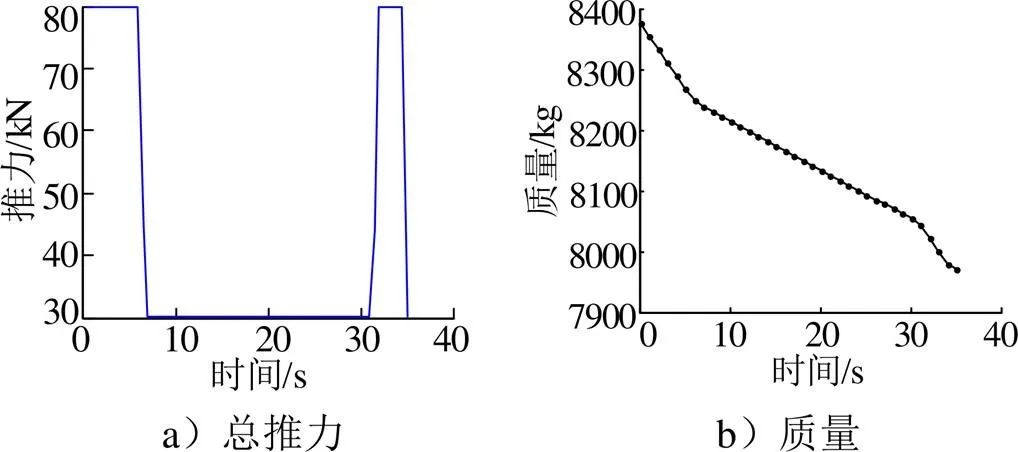
图11 总推力大小和质量变化
根据初始状态的概率分布函数随机生成400组垂直着陆段初始状态,将垂直动力着陆轨迹优化问题通过凸化处理得到二阶锥凸问题,仿真采用CVX凸优化工具包求解二阶锥凸问题,内置求解器选择Mosek求解器,单次优化平均时间在0.7 s左右,若采用定制化得凸优化求解器可以进一步提升求解速度,使其具备弹上机条件。仿真结果表明各个初始状态均能通过该算法得到到达目标点的优化轨迹,且优化轨迹均满足约束条件。在所有初始状态仿真中,燃料消耗最大为474.175 6 kg,最小为348.944 8 kg,平均燃料消耗为405.923 0 kg。燃料消耗均小于剩余推进剂质量,因此算法优化得到的轨迹可行。
同时,凸优化在线轨迹优化可以与模型预测控制结合,这种制导方法的核心是将轨迹优化算法作为制导指令生成器,通过在线滚动时域内执行优化计算,不断根据当前状态更新最优指令,并将最新指令直接用作制导信号,因此这种在线制导方式具备较强的鲁棒性,且制导精度与更新计算效率相关,同时整个制导方法还必须保证每个更新周期内优化问题求解的递归可行性,即如在初始时刻优化问题计算可行,那么在问题时域内任何一次优化更新计算均可行。文献[8]对基于MPC框架中凸优化算法的递归可行性进行了证明。因此对于垂直着陆段,如果以误差范围内的初始状态设计的优化轨迹可行,那么整个着陆过程的更新计算均可行。
综合分析,任务1、任务2、任务3机动方案燃料消耗率(加上垂直着陆段燃料消耗)分别约为60.11%、58.37%、53.23%。燃料消耗均小于初始推进剂质量,优化轨迹满足任务要求。
4 结束语
本文主要研究中远射程(不小于500 km)的月面机动轨迹优化,根据月面机动各飞行阶段的特性分别建立动力学模型,将整个机动过程的轨迹优化问题分为两个轨迹优化问题:月面机动任务轨迹优化问题和终端垂直动力段在线轨迹优化问题,分别对两个轨迹优化问题进行了数值分析,验证了轨迹优化算法的有效性及多任务适应性。首先,针对不同目标点飞行任务进行大范围机动轨迹优化,优化得到的机动任务轨迹均满足飞行任务终端约束以及较低的燃料消耗。继动力减速段之后,垂直着陆段考虑初始状态偏差进行蒙德卡洛仿真分析,仿真结果表明基于凸优化的在线轨迹优化算法具有较高的计算效率且鲁棒性较强。最后结合两部分的轨迹优化结果可以大致估算出整个机动任务的燃料消耗,任务的燃料消耗满足燃料约束条件,故整个机动优化轨迹可行。
[1] Bridenstine J. Artemis plan—NASA’s lunar exploration program overview[R]. NASA, 2020.
[2] NASA. Roscosmos sign joint statement on researching, exploring deep space[N/OL].(2017-09-27)[2018-01].https://www.nasa.gov/feature/nasa- roscosmos-sign-joint-statement-on-researching-exploring-deep-space.
[3] 陈克俊, 刘鲁华, 孟云鹤. 远程火箭飞行动力学与制导. 北京: 国防工业出版社. 2014.
Chen Kejun, Liu Luhua, Meng Yunhe. Launch vehicle flight dynamics and guidance. Beijing: National Defense Idustry Press, 2014.
[4] Acikmese B, Ploen S R. Convex programming approach to powered descent guidance for mars landing[J]. Journal of Guidance Control & Dynamics, 2007, 30(5): 1353-1366.
[5] Blackmore L, Acikmese B, Scharf D P. Minimum landing error powered descent guidance for mars landing using convex optimization[J]. Journal of Guidance Control & Dynamics, 2010, 33(4): 1161-1171.
[6] Acikmese B, Carson J M, Blackmore L. Lossless convexification of nonconvex control bound and pointing constraints in the soft landing optimal control problem[J]. IEEE Transactions on Control Systems Technology, 2013, 21( 6): 2104-2113.
[7] 张志国, 马英, 耿光有, 余梦伦. 火箭垂直回收着陆段在线制导凸优化方法[J]. 弹道学报, 2017, 29(1): 9-16.
Zhang Zhiguo, Ma Ying, Geng Guangyou, Yu Menglun. Convex optimization method used in the landing-phase online guidance of rocket vertical recovery[J]. Journal of Ballistics, 2017, 29(1): 9-16.
[8] 王劲博. 可重复使用运载火箭在线轨迹优化与制导方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2019.
Wang Jinbo. Research on online trajectory optimization and guidance methods for reusable rocket[D]. Harbin: Harbin Institute of Technology, 2019.
[9] 马林. 垂直起降运载火箭动力软着陆轨迹优化方法研究[D]. 杭州: 浙江大学, 2019.
Ma Lin. Trajectory optimization or powered landing of vertical takeoff and vertical landing launch vehicles[D]. Hangzhou: Zhejiang University, 2019.
Initial Optimization of Lunar Large-scale Space Maneuver
Ren Kuan, Shen Lin, Li Yang, Wu Sheng-bao, Hu Dong-sheng
(R&D Department, China Academy of Launch Vehicle Technology, 100076, Beijing)
The large-scale lunar maneuvering technology will be one of the key technologies for future exploration and development of the moon. The optimization of lunar maneuvering trajectory can significantly reduce fuel consumption during the maneuvering process. The initial optimization of the lunar large-scale maneuvering trajectory is focused on, and the entire maneuvering trajectory is divided into ascending section, free-floating section, first dynamic deceleration section, vertical dynamic landing section. The first three flight sections are the initial guidance for the flight mission. While reaching the flight range, the flight terminal meets the landing requirements of the vertical power landing section, and the vertical power landing section is to correct the initial guidance error so that the aircraft can accurately land at the target point. Firstly, the kinetic model of each flight section, the first three flight sections is established are considered as a trajectory optimization problem, and genetic optimization algorithm is used to solve the optimization problem. In addition, the trajectory optimization problem of the vertical dynamic landing section is transformed into a finite-dimensional SOCP (second-order cone program) problem through lossless convexification, and solved by the convex optimization problem solver to achieve online trajectory optimization. The simulation results show that the trajectory optimization method adopted has high task adaptability and robustness, and can achieve high-precision vertical power landing adapting to different maneuver task requirements.
large-scale lunar maneuvering technology; optimization of lunar maneuvering trajectory; vertical power landing; convex optimization
2097-1974(2023)01-0052-07
10.7654/j.issn.2097-1974.20230111
V476.3
A
2020-09-18;
2021-01-23
任 宽(1996-),男,工程师,主要研究方向为飞行器制导与控制。
申 麟(1970-),男,研究员,主要研究方向为飞行器总体设计。
李 扬(1981-),女,研究员,主要研究方向为飞行器总体设计。
吴胜宝(1985-),男,高级工程师,主要研究方向为飞行器总体设计。
胡冬生(1982-),男,高级工程师,主要研究方向为弹道总体设计。
