从近期战争冲突看无人机的抗干扰防欺骗问题
2023-03-07郑勇峰孔红华鄢家志
郑勇峰 孔红华 鄢家志


现代战争中,无人机相对于有人机具有高效能、低成本、人员风险小等优势,因此越来越受到青睐,战术地位不断提升。由于无人机自身的技术特点,软杀伤具有明显优势,但严重依赖于导航系统、通信系统、网络系统,在任务执行中极易受到干扰/欺骗或摧毁。目前,对无人机进行电子干扰和信息欺骗仍是反无人机作战的主要手段,出现了许多成功的作战案例。面对这一问题,无人机系统在设计和过程中应综合利用多种无人机抗干扰、防欺骗的技术手段,全面提升抗干扰/防欺骗能力,提升了战场生存力和在复杂战场环境下的任务成功率。
反无人机主要干扰/欺骗/毁伤方式
通信干扰/欺骗主要方式
(1)通信干扰/欺骗
通信干扰可有效阻断无人机和控制站之间的指控链路和情报链路,从实施方式看,通常可分为压制性干扰和欺骗性干扰。压制性干扰按照干扰频道的宽度可以分为瞄准式干扰、半瞄准式干扰和阻塞式干扰。瞄准式干扰的中心频率与对方无人机数据链信号频率重合。半瞄准式干扰,频率重合的准确度较差,即干扰信号频谱与对方数据链通信频谱没有完全重合。阻塞式干扰辐射的频率很宽,通常能够覆盖对方数据链的整个工作频段。欺骗性干扰主要有2种:一种是在对敌方数据链信号进行截获并解析的基础上,实施干扰; 另外一种是通过长期的侦听,获得敌方数据链的工作频段,对接收到的数据链信号进行复制(经过延迟、放大)后,发射给敌方无人机数据链设备实施的干扰
(2)网络入侵
现在很多小型无人机采用使用手机和平板电脑进行操控,无人机与遥控器之间采用WiFi信号进行通信,因此可以使用成熟的黑客技术来劫持无人机。
导航干扰/欺骗主要方式
(1)导航干扰
无人机一般利用卫星导航定位系统对自身位置进行定位,对卫星导航系统进行干扰对抗引起了广泛的关注,干扰样式、平台、策略、效能等诸方面都被深入分析。通过对无人机实施卫星导航信号干扰阻断,可使无人机丢失卫星导航信息,不得不切换至惯性导航等其他导航模式,从而影响无人机的飞控系统,干扰无人机的飞行精度和任务完成。由于卫星导航信号较弱,此种干扰手段容易实现。
此外,也可以对地面无线电信标的导航信号实施电磁干扰,使无人机在返场降落阶段丢失精准进场导航信息而被迫切換至其它导航方式降落,增加其降落的危险系数。
(2)导航欺骗
欺骗信号生成方式可分为转发式欺骗和生成式欺骗:
转发式欺骗就是指在待欺骗目标周边放置一台GPS接收机,在获取真实GPS信号的基础上,进行存储并转发至待欺骗对象,从而起到欺骗的效果。按照延迟中有无人为延迟又可将转发式干扰分为直接转发式欺骗干扰和延迟转发式干扰。
其中,直接转发式欺骗干扰,即对真实卫星信号进行接收、放大后直接通过发射天线辐射出去,中间没有人为的选择性延迟。延迟转发式干扰在真实卫星信号的分离处理阶段按照一定算法对不同的卫星信号进行选择性人为延迟,以使欺骗目标生成伪导航星座,从而达到诱骗导航的目的。
利用欺骗设备,根据预先指定的期望用户位置,实时计算出在该位置上用户所需接收到的GPS信号的码相位延迟、载波多普勒、导航电文等必要参数,并在此基础上生成在该点的虚假GPS信号并通过发射天线辐射到欺骗对象,以虚假信号的功率优势遮蔽真实GPS信号,使其逐步跟踪捕获到欺骗信号指定的伪码相位和载波多普勒上,从而使得待欺骗对象得到错误的伪距测量值,进而解算出错误的位置信息,最终达到欺骗目的。
定向能武器毁伤
(1)激光武器拦截
利用定向激光束产生的烧蚀等效应实施精确打击,具有速度快、精度高、成本低和抗电磁干扰能力强等优点,对低空慢速小型目标和突然出现的近距离目标非常有效。但激光武器作用距离较近,对电源功率要求高,装备通常比较笨重,而且受云层和烟雾等天气和战场环境影响大,使用条件比较苛刻。
(2)高功率微波武器攻击
通过定向辐射的高功率微波束,可直接攻击无人机电子系统,使其失能或损毁,能够在一定波束面内同时毁伤多个目标,具有速度快、毁伤面积大、适用平台多、可重复使用、受环境影响小等优点。不足是辐射距离较近,对电源功率要求高,装备通常比较笨重。
常规手段直接击落
使用高炮、机枪和空空/地空导弹等传统物理毁伤手段,对构成威胁的敌对无人机直接毁伤或击落。密集阵和传统的高炮、高机手段,优点是成本低,缺点是精度差距离近。便携式(肩扛式)地空导弹有效提升了打击精度,但射高通常也只能达到3000-5000米。而远中近程地空导弹用于反无人机优点是射程射高与精度都能满足需求,不足是反应速度慢和发射成本过高。
无人机主要抗干扰/防欺骗技术方法
无人机系统主要对抗技术措施
(1)隐身低辐射设计
综合采用无人机平台低可探测性外形设计,S形进气道,任务载荷内置,机体涂敷吸波材料,机体采用航空迷彩和天空灰等伪装涂装,减少发动机红外辐射特征,降低发动机噪声等手段,最大程度减小无人机的雷达截面积(RCS),改善无人机的视觉和听觉隐身性能,降低被探测发现和干扰攻击的概率,可有效提升无人机战场生存能力。
(2)余度设计技术
余度设计也称为容错技术,是通过在无人机机载系统中增加额外的资源,利用仲裁管理模块对资源进行合理的选择和分配,来保证在子系统受到干扰时保持正常工作,提高系统与产品的安全性与可靠性。
(3)空射诱饵与反辐射攻击
在遭受敌方地空导弹和空空导弹等锁定攻击威胁时,除传统的空射红外弹和箔条弹外,还可采用空射有源诱饵等方式对抗。此外,也可采用无人机挂载反辐射导弹,对电磁干扰威胁源实施反辐射攻击,从物理上直接清除威胁。
通信抗干扰/防欺骗主要措施
(1)安全通信技术
按作用域分:码域抗干扰,如直接序列扩频(Direct Sequence Spread Spectrum,DSSS);功率域抗干扰,如直接增加功率抗干扰;频域抗干扰,如跳频;空域抗干扰,如多天线波束赋形。通过多种抗干扰措施,可大大降低无人机通信链路被侦察截获和干扰风险。同时,对其遥控遥测和通信链路信号进行复杂的信源和信道加密,高增益纠错编码等措施进一步提升抗干扰能力。针对通信资源受限和移动节点频繁进出网络等情况,重点研究轻量化认证协议及认证保密机制。
(2)频谱管理技术
通过对固有频率分配体系的及时、合理优化,并结合实际环境条件完成对频谱宽度的检测,同时落实对备用频段的合理、充分预留。
导航抗干扰/防欺骗主要措施
(1)自主导航
GNSS拒止条件下,无人机常用的两种自主导航:
惯性导航(INS),不易受到干扰,可在卫星导航信号受到干扰时完成导航任务。与大气数据计算机结合还可组合成为大气数据惯性基准系统。
视学导航(Vision-Based Navigation,VBN)主要是指通过飞行器机载的可见光、红外、SAR等视觉成像设备对地面进行拍照,对所获影像进行导航参数测量,并通过图像匹配算法与包含地理位置信息的数字景象基准图进行比对从而实现导航的方式。视觉导航按傳感器类型可分为被动视觉导航和主动视觉导航,按照是否需要导航地图可分为地图型导航和无地图导航。
(2)导航系统主要抗干扰/防欺骗技术
无人机配装自适应抗干扰卫星接收天线,其采用多个接受阵元从不同方向接收卫星导航信号,进行对比,剔除受干扰的信号。使用相关峰位置、窄相关、RAIM等技术,在信号捕获、跟踪、计算等各个环节减小转发式干扰对导航定位的影响,加强相关算法设计,如空域、时域、频域处理或者空时、空频联合处理方案,提升长时间受干扰状态下导航设备的自动重启、导航信号重新捕获和导航系统快速恢复正常能力。
反电磁干扰主要措施
电磁干扰可分为两种:传导干扰和辐射干扰。通常传导干扰可采取滤波和限幅措施,辐射干扰可采用屏蔽和接地等措施。
滤波器可以对特定频率进行有效滤除,主要包括:低通滤波器、高通滤波器、带通滤波器、带阻滤波器几种类型。限幅器的主要特性:(1)小信号输入时,插损小;(2)大信号输入时,插损大;(3)限幅速度快,需达到ns级;(4)大信号消失后,快速恢复到低插损
影响屏蔽因素:缝隙、开孔、电缆穿透等。孔缝泄漏量的因素主要有两个:孔缝面积和孔缝最大线度尺寸。常见的屏蔽处理方式:金属罩屏蔽、铜箔屏蔽等。
无人机主要抗干扰/防欺骗战术方法
融入作战体系
无人机对抗干扰战法设计首先应融入作战体系,并得到整个作战体系的有力支撑。无人机系统不只是一套装备,而是作为体系节点而存在。其作战使用应融入体系统一规划,统筹使用,其作战效益也应以其体系贡献率为根本依归,坚决防止单打独斗。为此,应将无人机与其他作战节点进行信息交链,实现互联互通。例如,在无人机受到电磁干扰丢失导航定位信息时,可以由其他空地预警系统对其进行雷达探测,并将所获位置信息提供给无人机控制站或直接向无人机注入导航定位数据进行辅助定位。此外,作战体系中的专用电子战飞机或其他作战力量也可对战场干扰源进行溯源定位,采取本机或它机电磁压制或发射发辐射导弹直接摧毁等方式尽快消除干扰威胁。
加强作战筹划
加强对战场电磁目标及其威胁范围的侦察掌握,周密实施作战筹划和航路规划,视情采取精心选择出动时机、雷达盲区隐蔽出航、利用有利地形掩护、主动减少电磁辐射、合理确定侦察区域和发射阵位等战法,主佯结合,虚实结合,降低被对手雷达、技侦和其他手段探测发现和实施干扰攻击的概率。
威胁分级处置
完善无人机抗干扰/防欺骗应急处置标准作业程序,对威胁进行合理的分级分类,按照轻重缓急设置不同的处置流程,采取地面控制人员干预和飞管计算机自动逻辑判定相结合的方式灵活处置。大体可区分为以下三种情况:
一般威胁:当出现干扰等意外情况时,系统能迅速识别并做出正确响应,合理采取规避威胁、排除故障、盘旋待机等方式,提高任务成功率。
重大威胁:无人机遭遇强电磁干扰攻击且无法完成任务时,应启动自动返航程序,及时脱离危险区,尽量确保无人机安全返回着陆。
致命威胁:当无人机不能安全返回着陆时,应尽快将关键数据传回地面或销毁,并努力使无人机不要坠落到敌方占领区、政治敏感区、城市人口密集区、重要能源/工业区。
技术战术方法结合
加强无人机各作战场景下的抗干扰战法设计和仿真验证,进一步完善抗干扰方案预案。遭遇干扰欺骗时,灵活采用人工/自动频率捷变、旁瓣对消、旁瓣匿影、通道/链路切换等技术战术措施迅速处置应对,最大程度减少和消除信息干扰带来的影响和损害,提升无人系统战场生存率和任务成功率。
战例分析
RQ-170被伊朗成功诱捕
(1)战例概况
2011年12月4日,伊朗宣布在伊东部边境地区击落一架入侵的美国RQ-170“哨兵”隐身无人侦察机。目前在RQ-170被诱捕的众多原因猜想中,最广为人知的是伊朗使用电子战手段俘获。伊朗利用美国无人机GPS“信号微弱、易于操纵”的弱点,通过对通信链路进行干扰,迫使这架飞机进入自动驾驶状态,然后重构它的GPS坐标,无需破译来自美国指挥中心的遥控信号和通信联系,引导它降落在伊朗境内,而这架无人机误认为其已返回在阿富汗的基地。
(2)过程及原理分析
RQ-170“哨兵”无人机机身两侧机翼上表面有两个突出的鼓包,可能装载用于波束扫描的抛物面天线或板状天线。机身下方任务载荷舱可安装主动电子扫描阵列雷达、红外/电视侦察设备等可执行多种任务的情报侦察载荷。通过对飞机外形尺寸的分析,可以得到无人机进行数据链通信、遥控操作和图像数据回传信号的天线尺寸;根据天线尺寸与信号半波长的关系,可以得知电磁信号波长;根据电磁波频率公式f=c/λ(频率=光速/波长),可以推测出电磁信号的大致频率范围,从而对重点关注的信号可以进行针对性地侦察。
压制式干扰是在敌方通信信号中强行注入频率相同、特征参数相同、功率更大的干扰信号。在RQ-170被美国操作员远程控制飞行阶段,伊朗以“捕获”行动前期侦察到的电磁信号相关参数为基础,通过定向天线对目标发射大功率的宽频带压制式干扰信号,使无人机与地面失去联系,被迫选择自动驾驶状态。在自动驾驶状态,无人机利用GPS卫星确定相关坐标,执行返航操作。从原理上说,由于压制干扰信号具有与无人机远程控制信号及其相似的特性且功率较大,因而无人机很难摆脱这种性质的有源干扰。
与压制式干扰相比,灵巧式干扰可以对目标信号的关键数据帧进行替换,从而伪造出与真实信号电磁特征参数、数据帧结构、编码样式完全相同的假信号,从而不影响GPS乃至组合导航设备的正常工作。通过长时间的缓慢诱骗,可以使进入自动驾驶状态的无人机逐渐偏离正常的航线,甚至沿干扰方预设的轨迹运行。公开资料显示,美国的GPS卫星信号报文有多种编码格式,可以简单地分为军码和民码,其军码信号经过加密无法解析,而民码信号所有特征参数、编码样式、数据帧结构均被美国完全公开,任何组织的个人都可能制造出与真实GPS信号格式相同的伪造信号。在行动中,伊朗可以先通过压制式干扰将GPS军用频段信号进行压制,迫使无人机使用民用频段进行导航,随后伊朗不断发射伪造的民用GPS信号报文,对无人机进行“诱骗”,從而使其顺利降落于伊朗秘密基地。
俄罗斯在叙利亚内战中挫败无人机袭扰
(1) 战例概况
2018年1月8日,俄驻叙利亚防空部队成功拦截了13架无人机群的袭扰。俄电子战部队成功夺取6架无人机的控制权,使3架降落、3架坠毁在俄军基地外,剩下7架被“铠甲”-S1弹炮合一防空系统击落。来袭无人机为简易组装的固定翼无人机,配装气压高度计、GPS接收机和自动驾驶仪,依靠GPS信号按照预先设定航路自动飞行。
俄综合运用了电子战和火力杀伤手段进行拦截。电子战手段方面,俄未公布本次拦截中使用的装备型号,但可能是在叙部署的“汽车场”或“驱虫剂”电子对抗系统,二者均具有对抗无人机群袭的能力。
(2)过程及原理分析
俄罗斯军队在叙利亚试验了对抗无人机(蜂群)大规模袭击的战术。俄军用来保护叙利亚军事设施的电子战系统被认为是抵御恐怖分子无人机的有效且廉价的办法。这些电子战系统都能在半径40-150km的范围内对来袭无人机群(的遥控信号)进行有效电子压制。除了笨重的固定式电子干扰设备之外,俄军士兵还配备了重约10kg的便携式反无人机干扰装置,它们很容易被安装在保护设施周围,帮助拉起抵御无人机的“帘幕”。其他对付无人机的方法也在研究中。最有前景的是“欺骗式攻击”:在攻击时向无人机的接收器发送模拟导航信号,向无人机提供假导航数据。这样就可以完全“劫持控制”来袭无人机。
专家认为,对付多轴旋翼飞行器和固定翼无人机最极端的电子战手段是用强大的微波辐射压制机载电子设备,可以直接烧毁无人机控制设备的电子线路板。俄罗斯技术公司宣布成功测试了射程可达10km以上的(反无人机)超高频微波防空系统,不排除这种微波炮在叙利亚被使用过。
俄乌冲突中的反无人机干扰
俄乌冲突初期,乌克兰的TB-2无人机的偷袭曾给俄军造成了不小的威胁和损失,有效迟滞了俄方进攻势头,鼓舞了乌方抵抗力量的军心士气。但随着俄罗斯迅速部署Borisoglebsk 2 MTLB 和 R-330Zh Zhitel等电子干扰反无人机系统,并加强了地面防空火力掩护,乌克兰TB-2型机战损迅速增加,作战效能明显下降,逐步失去了战场明星光环。正如无人和机器人军事系统分析专家塞缪尔·本德特说的那样:“与冲突的前几个月相比,俄罗斯的电子战和防空系统变得更有组织和有效,俄罗斯军队正在使用预警雷达来识别无人机和电子战系统,以干扰手段破坏其通信。此外,他们还使用各种武器,如机枪和道尔防空导弹系统来击落无人机”。据俄国防部统计,截至2023月1月1日,俄罗斯防空系统共摧毁了2741架各型无人机。
反无人机技术装备
俄罗斯
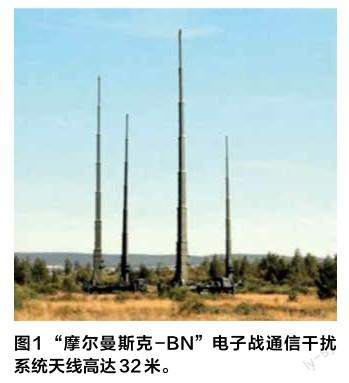
(1)“摩尔曼斯克-BN”电子战通信干扰系统
俄罗斯“摩尔曼斯克-BN”电子战车辆干扰卫星通信系统,专门设计用于干扰北约和美国的高频军用卫星通信,干扰频率:3-30MHz,干扰区域:640,000km2,干扰距离:5,000-8,000km。
(2)Stupor反无人机枪
俄罗斯国防部主要机器人研究与测试中心还开发了Stupor反无人机枪,用于在直接可见度下对抗包括直升机在内的无人驾驶飞行器。枪发射单独的电磁脉冲来阻塞用于引导无人机的通道,使无人机与控制器失去联系并坠毁。该设备不会对无人机硬件造成损坏,因此可以在被机枪压制后重新启动。
(3)Krasukha-S4
据美国陆军数据库称, Krasukha-S4旨在干扰约160km外的卫星信号以及监视雷达和雷达制导武器。该系统还能够对敌人的电子战(EW)系统和通信造成损害。Krasukha-S4被描述为对抗“飞行雷达”的工具。在基辅附近部署Krasukha-S4将使乌克兰军队及其国际伙伴更难通过雷达在该地区发现和瞄准俄罗斯部队。
(4)Borisoglebsk-2
Borisoglebsk 2是俄罗斯的MTLBU地面车载多功能电子战武器系统,旨在干扰卫星通信和无线电导航系统,并检测、定位和干扰战术级指挥和控制无线电网络和通信线路。

(5)R-330Zh Zhitel
R-330Zh设计用于检测、测向和分析来自100-2000MHz频率范围内的无线电源的信号。此外,该设备能够拦截和抑制无人机控制信道,对半径20-30km范围内的卫星通信系统、导航设备和GSM-900/1800蜂窝通信系统的基站产生无线电干扰。
乌克兰
(1)EDM4S Sky Wipers
EDM4S是一款手持式反无人机步枪,操作员将其对准空中目标,扣动扳机会激活电磁脉冲(EMP)效应,从而导致无人机通信信号的部分或完全中断,可能导致飞机从空中坠落、(自动)反转航向以返回其发射点,或执行紧急着陆。该武器的射程可达5km。
2022年5月,乌克兰地面部队(Sukhoputni Viyska)的士兵在乌克兰东部和南部战线使用立陶宛EDM4S Sky Wiper(反无人机干扰器)对抗俄罗斯无人机。

(2)KVSG-3干扰器
ANTIDRONE KVSG-3能够抑制试图进入保护区的敌方无人机的控制和导航通道。它的总输出功率为50W,可以击中最远约1km以外的低空飞行物体。该设备重约6kg(13.2lb),电池电量耗尽前的最长工作时间为40分钟。
美国
(1)高能激光武器系统
2019年10月,美国空军接收了1台搭载在1辆小型全地形车上的高能激光武器系统(HELWS)。HELWS系统由美国雷神公司研制,采用光电/红外传感器及高能微波系统对敌方或未经授权的无人机进行探测、识别和跟踪,并干扰其导航系统,一旦锁定目标,便可通过激光使其在数秒内失效。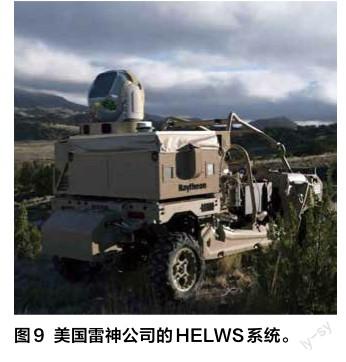
(2)防空综合系统
2019年美国海军陆战队防空综合系统(MADIS)完成了海外试验。该系统采用干扰手段和机枪武器对付无人机,可搭载在MRZR全地形车、联合轻型战术车辆及其他平台上。2019年6月,搭载在LHD-4“拳师”号两栖攻击舰上的海军陆战队利用MADIS使一架靠近该舰、被认为构成威胁的伊朗无人机失效。
(3)多任务高能激光
美国陆军正在开发更高效的固态高能激光(HEL)技术,使激光武器能够安装在更小、机动性更强的陆军平台上,从而提高这些平台的作战能力。这辆编号为MV094B的美國陆军战车上,贴出了多任务高能激光器(MMHEL)的战绩图,显示该系统已击落了64架各式无人机。
土耳其
(1)Sahin反无人机武器系统
土耳其军队装备了一款名为“沙欣”(Sahin)的反无人机武器系统。该系统由土耳其Aselsan公司开发,旨在摧毁迷你或小型无人机,可为军事基地、边境地区或防空设施提供必要的保护。
Sahin采用了单轴拖车的设计,装备了一部远程自动武器站,配备有一挺40mm MK19 Mod 3榴弹发射器,备弹64发,最大射程700m,炮塔可进行360°旋转,仰角为-10°至+60°。加上其他配件后,该系统战斗全重2500kg,全长3.72m,宽2.45m,高2.67m。通过雷达进行目标跟踪和弹道计算,最终交由武器站实施打击的作战方式,可有效针对小型无人机进行拦截。

结论
导航和链路是无人机飞行和完成任务最重要的两个环节,在对抗程度日益加剧的现代战争环境下,作战无人机在设计之初应提出“对卫星导航用而不靠、对无线链路用而不靠”的设计理念,从“设备级”和“系统级”两个层面开展设计工作。
(1)在设备级层面,导航采用抗干扰卫星导航天线等技术;链路设备采取直接序列扩频和跳频抗干扰等措施技术。
(2)在系统级层面,组合导航系统进行综合管理与防劫持设计,针对不同飞行阶段,对惯导、卫星等多导航源进行组合使用,多源判断采信合理的数据源。不依靠卫星导航信息飞行和完成任务的能力,在这种情况下主要是通过纯惯性模式加气压高度修正的方法进行飞行控制随着技术的发展,导航系统抗干扰技术将朝着体系抗干扰、多域融合和智能化方向发展。在数据链路的使用上,在物理层和链路层提高链路系统容量和鲁棒性的各种抗干扰技术, 协作通信技术以及认知无线电技术被研究、并逐步应用于无人机数据链,利用感知频谱环境并进行系统重构的技术将是无人机数据链智能抗干扰的主要发展方向。
