基于多层LSTM模型的雷达目标航迹快速识别算法
2023-03-07李永,朱姝
李 永,朱 姝
(1.郑州西亚斯学院 电子信息工程学院,河南 郑州 451150;2.国防科技大学 计算机学院,湖南 长沙 410015)
0 引言
雷达是一种目标探测的电子设备,主要由发射机、接收机和接收天线等部分组成。探测过程中主要依据电磁波完成,以获取目标的相关信息,例如距离、径向速度和方位等[1]。目标识别是雷达领域的一个重要研究方向,但是在识别过程中,由于雷达所在位置较高,会在回波中产生显著的地杂波,导致雷达的目标识别效率较低,且效果较差,雷达显示屏上的点迹杂乱,影响点迹的凝聚和航迹的形成,干扰识别结果[2]。部分企业甚至为了降低应用成本,限制了雷达收发系统的束波扫描功能,导致接收机只能识别目标的一维信息[3],无法获取目标的多维信息,目标轨迹的识别效果受到限制。因此,为了提升雷达定位精度,研究一种高效的雷达目标航迹快速识别算法具有重要意义。
针对雷达目标航迹快速识别这一重要课题,文献[4]提出了一种基于点迹时空关系的雷达目标航迹识别算法,首先对雷达点迹数据进行属性选择,然后挖掘点迹数据在空间关系上的间距值特征,最后构建递归神经网络进一步捕捉点迹数据的时空关系特征,实现对目标航迹的分类识别,但是该方法对于目标位置的识别存在较大误差。文献[5]提出了一种基于卷积神经网络的雷达目标航迹识别算法,根据实际雷达数据特点,提出使用对数的雷达航迹预处理方法,并构建了基于卷积神经网络的深度学习模型,实现对雷达对抗中的目标航迹的识别与检测,但是在实际应用中发现该方法存在航迹识别时间较长的问题。文献[6]提出了一种利用多分辨率融合卷积神经网络实现的自动雷达波形识别算法,首先对嵌入在噪声中的信号进行处理,获得时频特征图像,然后通过插值来调整图像的大小,并发送到所提出的网络中进行训练和识别,该网络采用双通道神经网络结构来获得不同分辨率的特征,并使用连接和初始模块进行特征融合,但该算法仍存在航迹识别精度不高的问题。文献[7]提出了一种合成孔径雷达多目标交互式运动识别方法,包括运动目标检测、目标类型识别、交互式运动特征提取和多目标交互式运动类型识别,该方法对合成孔径雷达目标图像进行小波阈值去噪,然后使用卷积神经网络来实现目标识别,但是实际应用效果并不好,识别性能还有待改进。文献[8]提出了一种基于光子模数转换器和卷积神经网络的高精度自动目标识别方案,光子模数转换器采用能够获得高分辨率的范围轮廓,卷积神经网络能够保证高识别精度,实验测试结果表明,该方案具有更好的识别精度,然而该方法的运算耗时相对较长。
为此,本文引入深度学习概念,提出基于多层长短期记忆网络(Long Short-Term Memory,LSTM)模型的雷达目标航迹快速识别算法,期望能够进一步提高雷达目标航迹的识别效果。本文主要创新点如下:
①改进一般循环神经网络存在的长期依赖问题,构建多层LSTM模型提取雷达目标航迹特征,提高了对于时间序列数据处理性能,雷达目标航迹特征提取效果较好;
②在多层LSTM模型中设计了融合模块,对提取得到的特征进行了融合处理,改善单一特征分析的不足,提高多层LSTM模型的可分类性;
③对模型超参数进行了优化,动态调整超参数,避免模型过快收敛;
④在仿真实验中,选取多个数据集和多个指标,通过反复测试验证本文算法性能。
1 雷达目标航迹信息采集与预处理
雷达在对目标航迹实行快速识别时,电磁波会获取目标运动的多种特征,包括目标的面积、长度和亮度均值等[9],这些信息能够充分体现目标的轨迹情况,因此,需要采集这些信息,用于后续识别研究使用。
导航雷达是依据接收机获取目标的测量信息,其接收到的雷达目标航迹如图1所示。
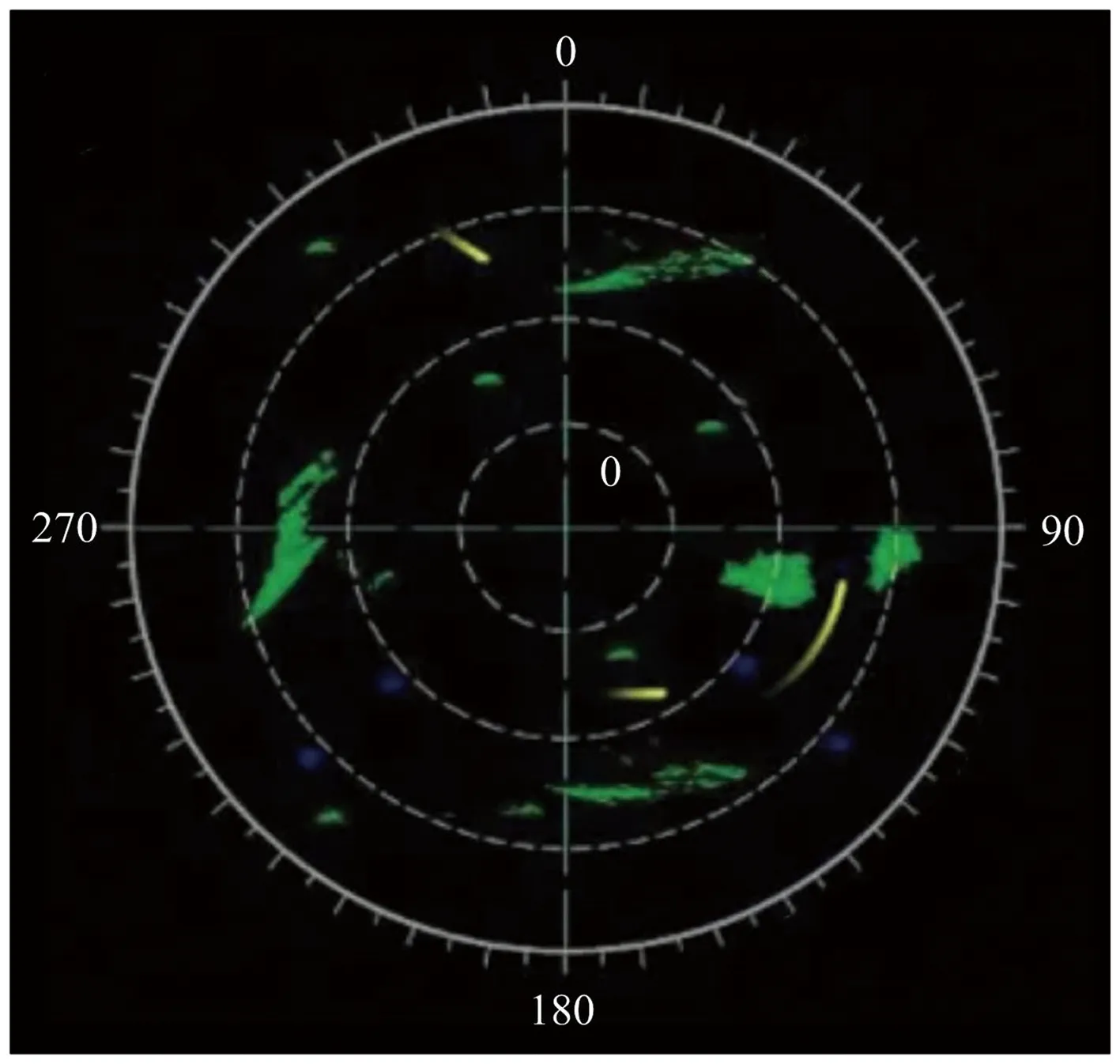
图1 雷达目标航迹Fig.1 Radar target track map
雷达目标航迹中,接收机测量获取的距离为:
rs=(el+ei)Trx+εiHi,
(1)
式中,i=1,2,…,N;rx为目标航迹位置矢量,且rx=[ag,bg,cg]T,T表示转置;Hi为航迹序列;εi表示距离和测量误差,对应第i个接收机;el和ei均为单位方向矢量,分别对应目标和发射机之间、目标和第i个接收机,二者的计算公式分别为:
(2)
(3)
式中,位置矢量用ql=[al,bl,cl]T和qi=[ai,bi,ci]T表示,前者对应发射机,后者对应第i个接收机。
N个距离和表达式结合后形成一组非线性方程,对该方程实行求解后[10-11],即可获取雷达目标的精准三维位置。
获取三维位置后,第i个接收机的速度量测公式为:
vs=(el+ei)v+rsζi,
(4)
式中,v=[va,vb,vc]T表示雷达目标的三维速度矢量;ζi为速度测量误差,对应第i个接收机。
完成雷达目标的局部速度计算后,对噪声和杂波的干扰实行抑制[12],并在此基础上获取第i个目标的扫频段航迹:
(5)

为避免噪声干扰,对采集得到的雷达目标航迹信息进行去噪处理,计算公式为:

(6)
式中,U为去噪函数;div为噪声散度因子;∇为梯度因子;‖∇I‖为噪声扩散幅值;h(‖∇I‖)为降噪因子。
2 基于多层LSTM模型的航迹识别模型
以采集得到的雷达目标航迹信息为原始数据,构建多层LSTM模型用于提取雷达目标航迹特征[13-14],并对多层LSTM模型的超参数进行优化,提升模型训练效果,高效完成雷达目标航迹快速识别。基于多层LSTM模型的识别结构如图2所示。
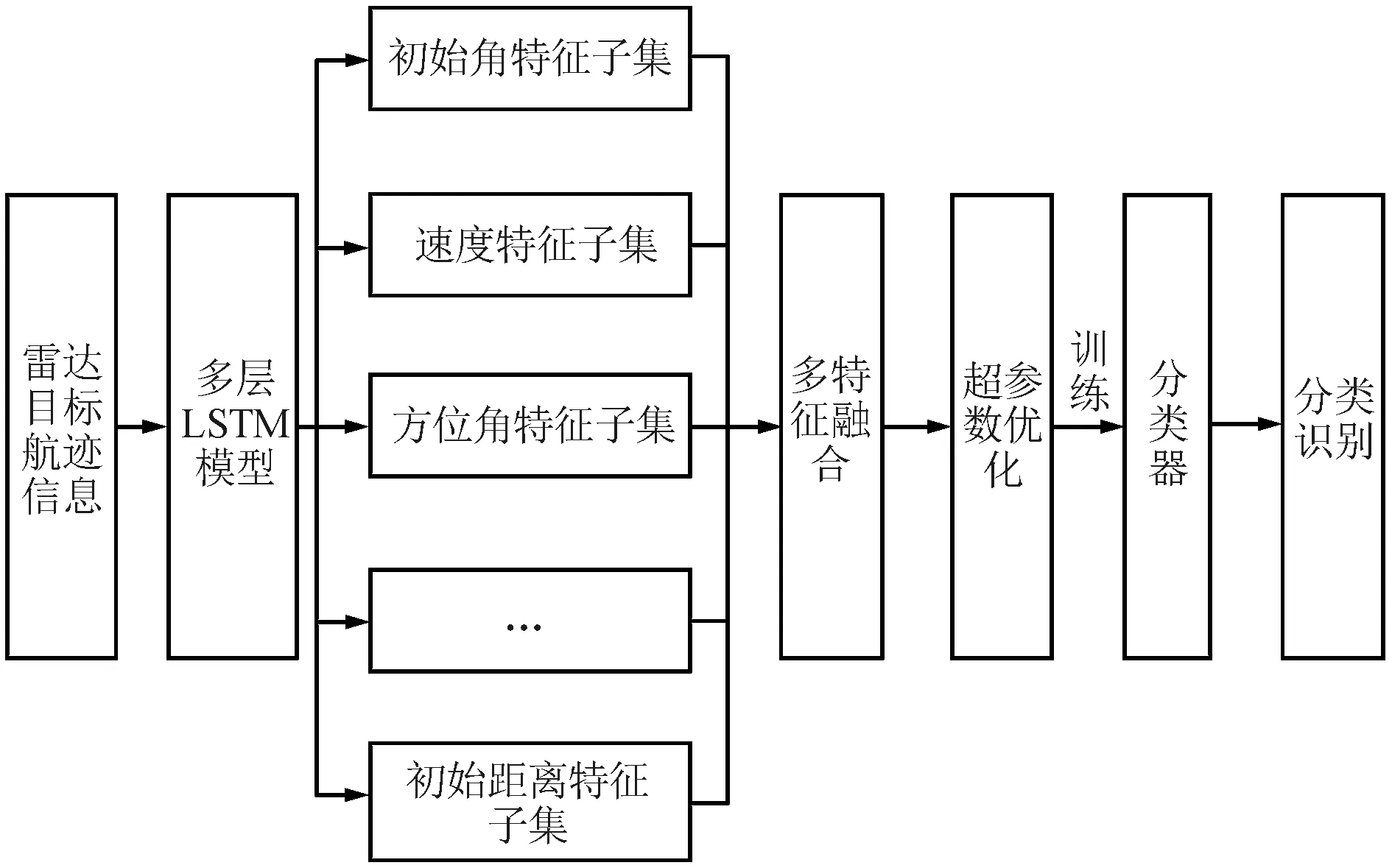
图2 基于多层LSTM模型的识别结构Fig.2 Identification structure based on multi-layer LSTM
图2的识别结构中,将采集并预处理完成的雷达目标航迹信息输入多层LSTM模型中,利用多层LSTM模型提取初始角特征子集、速度特征子集、方位角特征子集和初始距离特征子集等多维度特征。在多层LSTM模型中设计特征融合模块,融合多维度特征并优化模型超参数,最后通过设计与训练分类器,完成雷达目标航迹的快速识别。
2.1 多层LSTM的目标航迹特征提取与融合
LSTM是循环神经网络的一种改进模型,为解决一般循环神经网络存在的长期依赖问题而设计,在时间序列数据处理方面具有非常好的性能[15]。本文设计多层LSTM模型,通过多层LSTM网络自主学习获取雷达目标航迹特征数据,具体如图3所示。
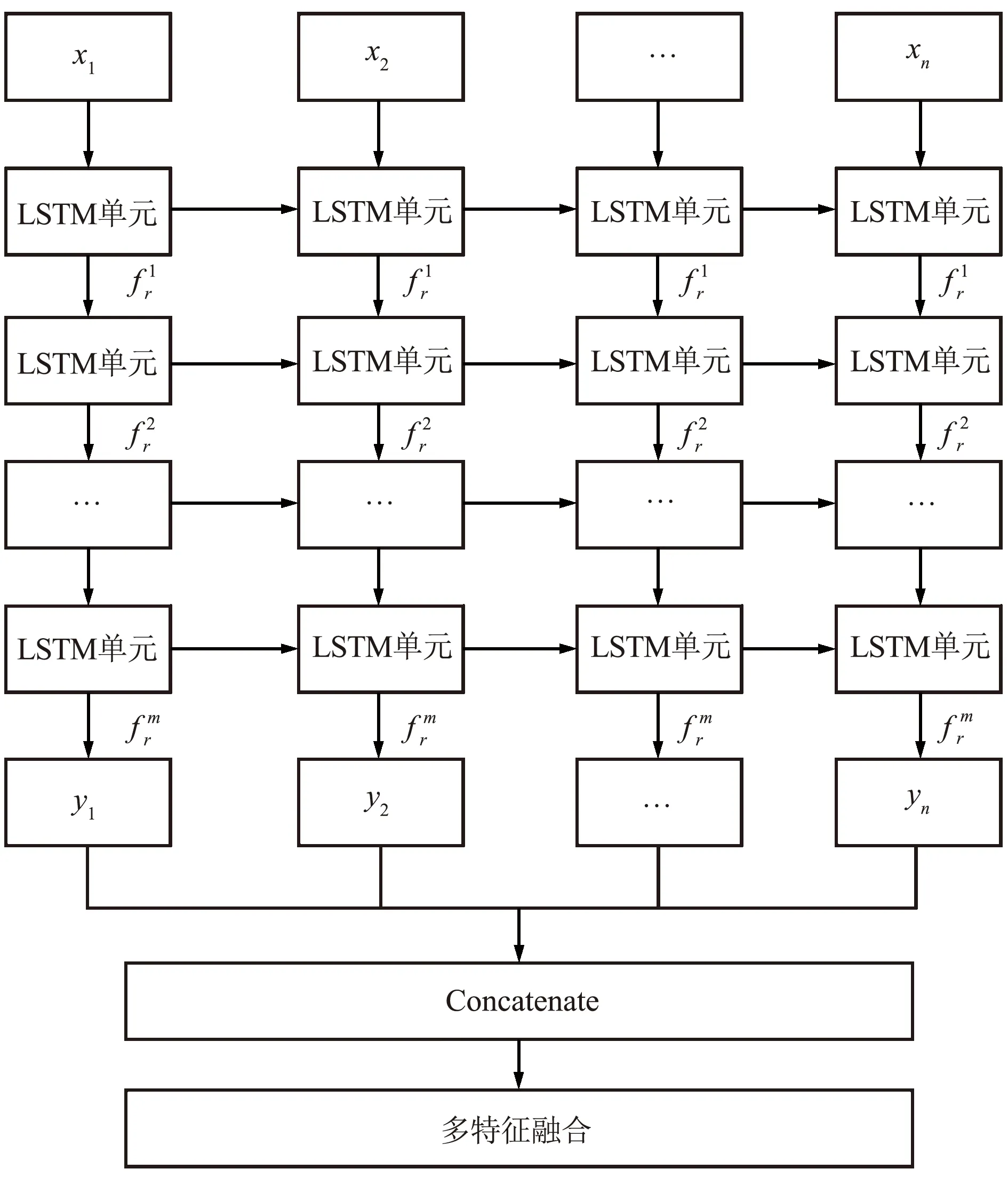
图3 多层LSTM的目标航迹特征提取与融合Fig.3 Target track feature extraction and fusion of multi-layer LSTM

多层LSTM前向传播公式为:
(7)

通常单一特征的直接输入不利于模型的进一步分类识别研究,为提高多层LSTM模型的可分类性[16],以前向传播提取得到的雷达目标航迹特征为基础,在LSTM模型中设计多特征融合模块对多个特征子集进行信息融合,即:
Yfusion=[y1,y2,…,yn]。
(8)
根据上述计算完成多层LSTM模型输出,利用多层LSTM模型得到雷达目标航迹特征融合向量。
2.2 基于Adam算法优化超参数
深度学习模型运行中,超参数的取值非常关键,对于模型的训练效果具有重要影响,因此本文利用Adam算法进行超参数优化,此处主要对多层LSTM模型的学习率进行优化[17-18]。
Adam算法是一种可替代随机梯度下降的一阶优化算法,利用该算法动态调整学习率过程中,首先需要计算梯度的一阶矩阵和二阶矩阵,即:
mt←γ1mt-1+(1-γ1)∇f(θ),
(9)
dt←γ2dt-1+(1-γ2)∇f(θ)2,
(10)
式中,t表示时间步;λ1和λ2表示一阶矩阵和二阶矩阵的衰减速率;f(θ)表示参数θ的随机函数值。
对一阶矩阵和二阶矩阵进行修正:
(11)
(12)
依据修正后的矩阵调整多层LSTM模型的学习率:
(13)
式中,τ表示常数。
根据上述计算完成多层LSTM模型的超参数优化,优化后的超参数能够根据模型训练情况实时调节学习率,避免模型过快收敛问题。
2.3 雷达目标航迹快速识别分类器
以目标航迹特征融合结果和超参数为基础,训练多层LSTM模型,基于训练完成的模型,通过损失函数计算实现雷达目标航迹的快速识别,算法描述为:
输入:雷达初始位置信息;
输出:雷达目标航迹识别结果。
初始化多层LSTM模型参数以及雷达目标运动数据,首先对多层LSTM模型进行训练,训练完成后输入雷达初始位置信息,构建雷达目标航迹快速识别分类器,完成目标航迹识别,步骤如下:
①在多层LSTM模型中输入雷达初始位置数据,提取航迹特征值,获取特征向量。
②对多特征向量进行融合处理,获取多特征融合向量集Yfusion。
③采用分类识别问题中经常使用的多分类交叉熵(Categorical Cross-Entropy,CCE)函数作为损失函数,由Softmax激活函数和损失函数Cross-Entropy共同构成,其中Softmax激活函数为:
(14)
式中,gi为多特征向量值,i为样本序号;I为样本数量。
通过Softmax激活函数处理后,特征向量值的取值[0,1],便于后续样本数据的分类识别。
损失函数Cross-Entropy的计算公式为:
(15)
④通过调节超参数训练CCE函数,同时输入多特征融合向量集Yfusion构建并训练分类器。
⑤通过分类器训练完成雷达目标航迹快速识别。
综合上述分析,完成基于多层LSTM模型的雷达目标航迹快速识别,流程如图4所示。
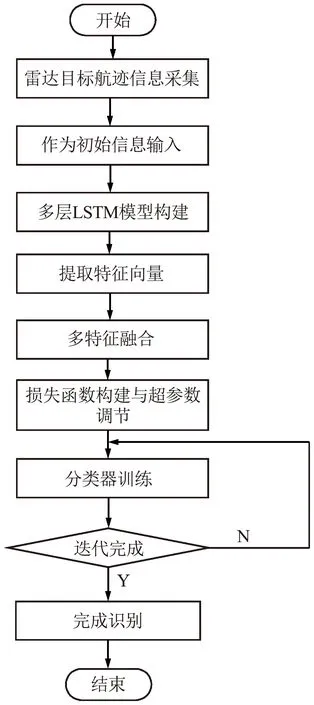
图4 雷达目标航迹快速识别流程Fig.4 Flow chart of rapid identification of radar target track
3 实验分析
3.1 实验参数
为验证本文算法的有效性,搭建仿真环境进行模拟测试。使用一台64 GB固态硬盘、16 GB高速缓存、8核高速处理器,系统为Windows 10的计算机,在其内部设置SQL Server 2019数据库和Matlab7.0软件,以提升实验运算速度,保证实验的科学可靠性。
3.2 实验数据集
为测试本文算法对雷达目标航迹的快速识别应用情况,选择3种数据集作为测试数据,对本文算法进行应用测试,3种数据集分别为海上航迹数据集、空中航迹数据集和MSTAR数据集。
海上航迹数据集来自于我国某海域探测数据,用HS-A表示,其采用的雷达系统工作频率为4.7 MHz,获取数据率为1 帧/min,共选择数据量为300帧,船舶全长19.5 m、型宽6.5 m、型深2.6 m、吃水1.1 m。
空中雷达数据选择某飞机实验室的测试数据FS-A,其中共混合2类飞机的飞行数据,分别用FS-1和FS-2表示。该数据使用的雷达系统中心频率为5 520 MHz,带宽为380 MHz,获取数据率为1 帧/min,飞机的长、宽和高分别为14.2,16,4.5 m和17.5,18,4.5 m。
MSTAR数据集的实验数据采用美国国防高等研究计划署(DARPA)支持的MSTAR计划所公布的实测合成孔径雷达地面静止目标数据,无论是在国内还是国际上,针对合成孔径雷达图像目标识别的研究基本上是基于该数据集而展开的。采集该数据集的传感器为高分辨率的聚束式合成孔径雷达,该雷达的分辨率为0.3 m×0.3 m。工作在X波段,所用的极化方式为HH极化方式。对采集到的数据进行前期处理,从中提取出像素大小为128 pixel×128 piexl,包含各类目标的切片图像。
从以上3个实验数据集中分别选取10组数据,以300×3的数字序列形式进行存储,形成实验数据集,其中8组用于多层LSTM模型训练,2组用于实验测试使用。
3.3 实验指标
(1)目标特征信息提取效果
以雷达目标的长度、初始距离、方位角和初始速度作为特征信息,以验证本文对于这些特征信息的提取效果,该结果与实际结果越接近,目标特征信息提取效果越好。
(2)目标特征融合效果
对雷达目标特征信息进行融合后,速度、方向、位置以及方向角特征分布越规范、冗余特征越少,目标特征融合效果越好。
(3)航迹识别效果
利用本文算法对雷达目标航迹进行识别,分析船舶目标和FS-1飞机目标发生中间航迹断裂情况下的识别效果,该结果与实际结果越接近,目标识别效果越好。
(4)位置识别误差
位置识别误差是指跟踪雷达目标过程中目标实际位置与不同算法的目标识别位置之间的差值,该指标的计算公式为:
error=K1-K2,
(16)
式中,K1表示目标实际位置;K2表示不同算法的目标位置识别结果。
(5)航迹识别时间
雷达目标航迹识别时间是指识别雷达目标航迹的所有时间消耗,识别时间越短,效率更高,该指标的计算公式为:
(17)
式中,ti表示第i个雷达目标航迹识别的时间消耗。
3.4 实验结果
(1)目标特征信息提取效果
为测试本文算法对于雷达目标空间运动多种特征的获取效果,以上述3个雷达目标的长度、初始距离、方位角和初始速度为主要测试特征信息,获取本文方法对2个目标特征信息的获取结果,如表1所示。
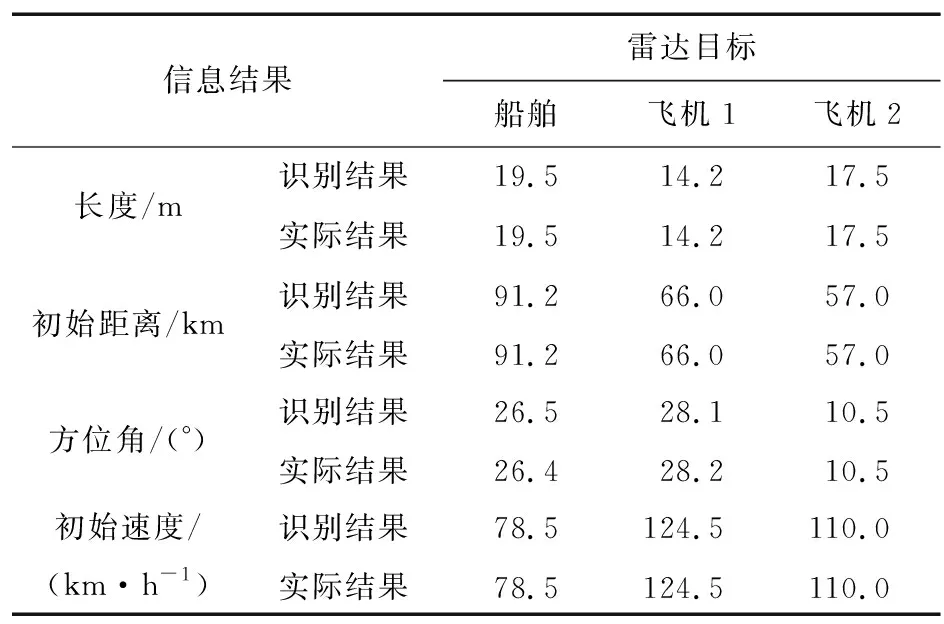
表1 3个目标特征信息的获取结果Tab.1 Results of the acquisition of the 3 target feature information
分析表1的测试结果可知,本文算法能够获取不同雷达目标的多种特征,并且获取的特征结果与实际结果一致。因此,本文方法能够可靠获取雷达目标的多特征信息,并且可区分不同雷达目标的特征信息结果,为雷达目标航迹快速识别提供可靠依据。
(2)目标特征融合效果
为测试本文算法对雷达目标多特征的融合效果,获取2种雷达目标在不同的扫描周期内,获取目标的特征信息融合结果,为了更直观体现本文算法的融合效果,以FS-1数据为目标数据,随机抽取获取该目标部分特征数据,采用本文算法对其实行融合,获取特征融合结果,如图5所示。
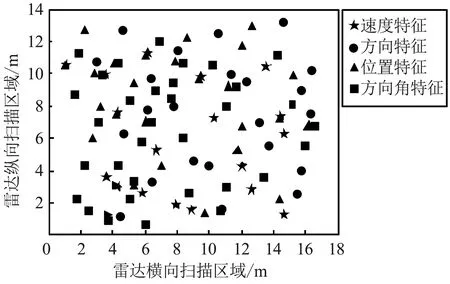
(a)FS-A数据集混合特征分布结果
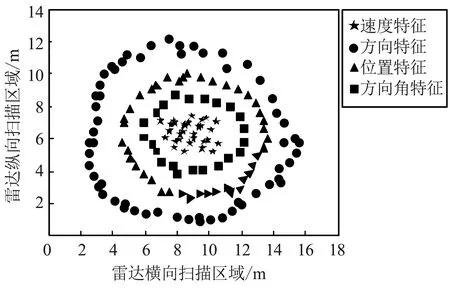
(b)FS-1目标数据特征融合结果图5 雷达目标的特征融合测试结果Fig.5 Feature fusion test results of the radar targets
分析图5的测试结果可知,采用本文算法对获取FS-1数据的2个雷达采集的目标数据的特征实行融合后,融合的结果中能够精准结合2个雷达的扫描结果,并且对于重复的冗余特征可实行有效删除,实现不同特征的有效融合。因此,本文多层LSTM模型的多特征融合效果良好,可有效获取雷达目标的特征融合结果。
(3)航迹识别效果
为衡量本文算法的目标航迹识别性,获取船舶目标和FS-1飞机目标发生中间航迹断裂情况下,本文算法对于航迹的识别结果,如图6所示。
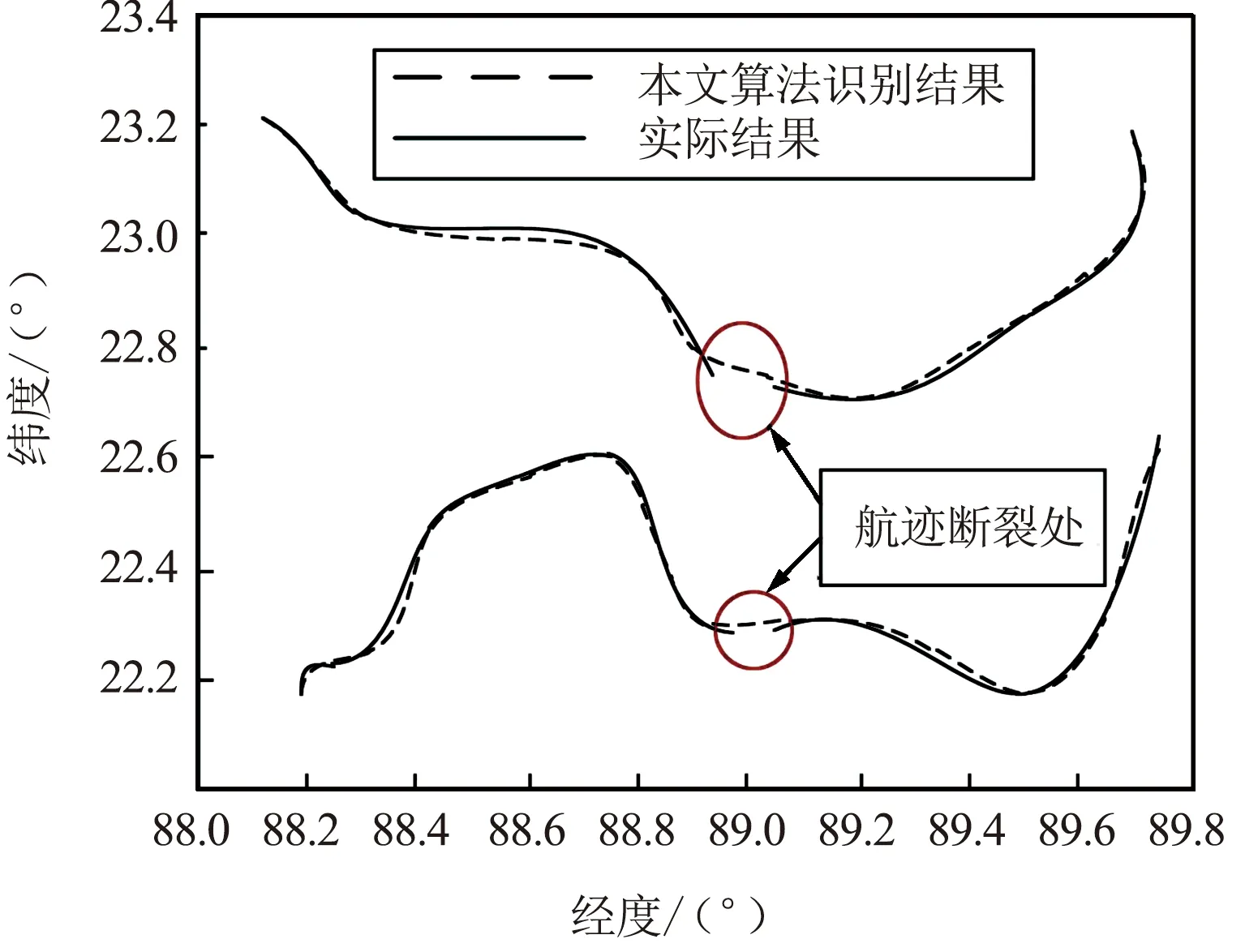
图6 雷达目标航迹的识别结果Fig.6 Identification result of the radar target track
分析图6的测试结果可知,2个雷达目标在不同的经、纬度下发生中间航迹断裂后,本文算法依旧能够完成航迹的可靠识别,信息的丢失没有对航迹识别结果造成影响,是因为本文方法在航迹识别时,优化了多层LSTM模型的超参数,进而保证了本文算法良好的目标航迹识别性能。
(4)目标位置误差
为直接验证本文算法对雷达目标航迹的快速识别效果,本文算法应用后得出的雷达目标航迹结果如图7所示。
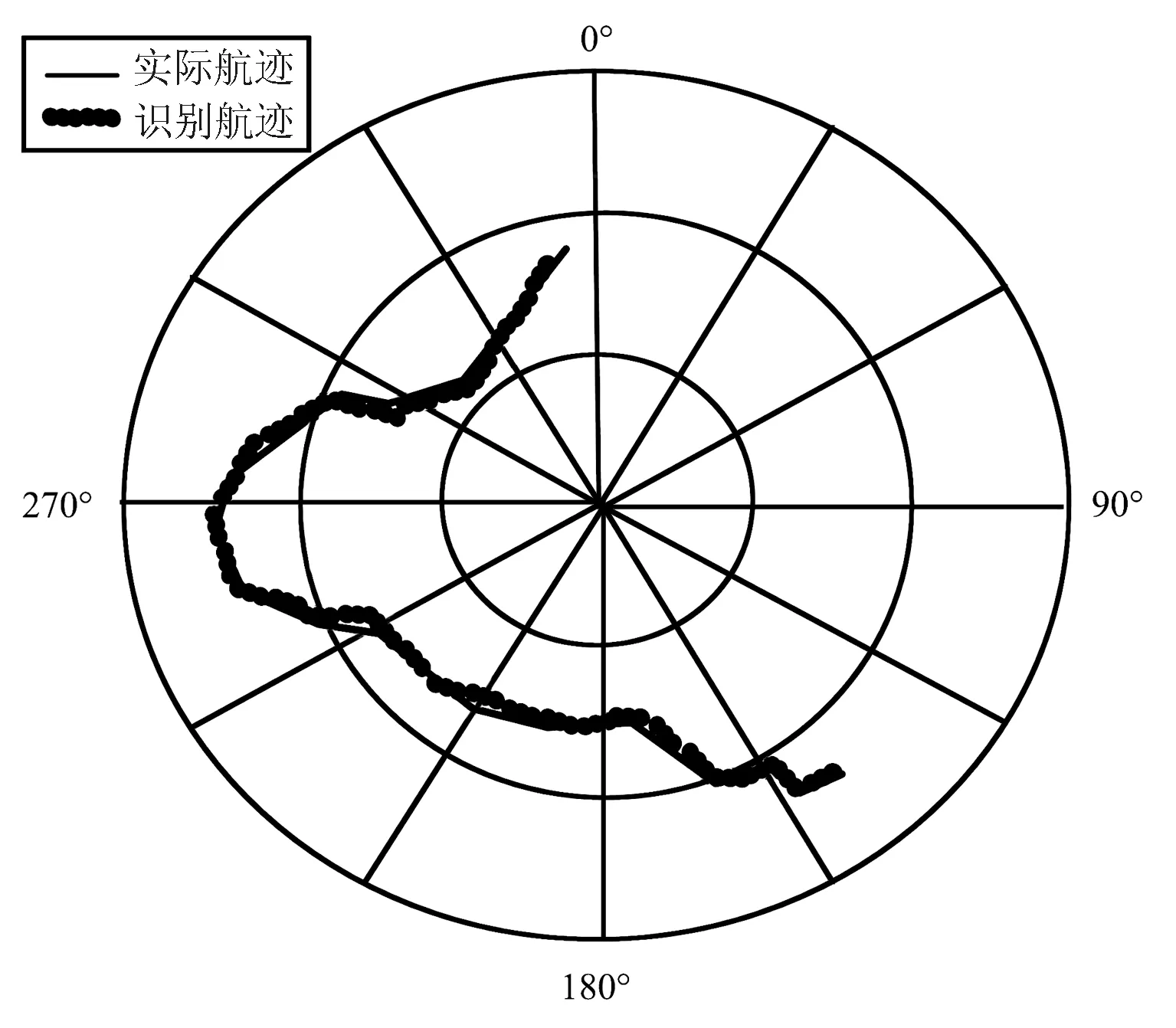
图7 雷达目标航迹识别测试结果Fig.7 Radar target track identification test results
由图7的测试结果可知,本文算法能够依据雷达目标的点迹扫描结果,生成目标的航迹图,并且该结果与目标的实际航迹结果一致,因此,本文算法能够精准完成雷达目标航迹快速识别。这是因为本文算法在进行航迹识别时,采用多层LSTM模型进行特征提取,充分发挥了多层LSTM模型对于数据的高效处理功能,因此能够获取精准的航迹识别结果。
为进一步分析本文算法对雷达目标航迹的识别性能,采用文献[4-8]的算法进行雷达目标位置识别,结果如表2所示。

表2 位置识别误差Tab.2 Position Identification Error
由表2的测试结果可知,本文算法的目标位置平均识别误差仅为0.31 m,文献[4]算法的目标位置平均识别误差最大,达到2.55 m,其次是文献[7]算法,目标位置平均识别误差为2.50 m,文献[5]算法的平均识别误差相对较低,为1.41 m,但仍远远高于本文算法,可见本文算法的目标位置平均识别误差更低、精度更高。由此可知,本文算法的航迹识别效果良好,可在设定标准内完成雷达目标航迹快速识别。本文对雷达目标航迹的多特征进行了融合处理,避免了冗余特征干扰,提高了识别准确度。
(5)航迹识别时间
比较文献[4-8]算法以及本文算法的雷达目标航迹识别时间,结果如表3所示。

表3 雷达目标航迹识别时间Tab.3 Radar target track identification time 单位:s
分析表3中的数据可知,文献[4]算法的雷达目标航迹识别时间平均值为1.43 s,文献[5]算法的平均值为2.06 s,文献[6]算法的平均值为1.52 s,文献[7]算法的平均值为1.87 s,文献[8]算法的平均值为1.53 s,本文算法的雷达目标航迹识别时间平均值为0.56 s,与对比实验算法相比,本文算法的雷达目标航迹识别时间更短、效率更高,证明本文方法可以快速识别雷达目标航迹,这得益于本文设计的多层LSTM模型对于数据处理的高效性。
4 结束语
雷达目标航迹扫描对于实际航行具有重要作用,针对传统方法存在的不足,提出了基于多层LSTM模型的雷达目标航迹快速识别算法,并将该算法用于雷达航迹数据集中进行相关测试。结果显示,提出得方法能够良好地获取雷达目标的特征信息,并且能够有效融合雷达目标的特征信息,在发生航迹断裂后,依旧能够实现航迹的准确识别,识别位置误差更低、时间更短。
但是雷达目标航行场景多样,本文对于场景带来的影响考虑并不充分,在下一步的研究中,将考虑更多样化的场景因素,同时在实验中使用更多的数据集进行测试,更加全面地分析雷达目标航迹识别相关问题,为雷达目标的场景化应用提供理论依据。
