地铁接触轨几何参数测量的技术要点
2023-03-06吴木生
吴木生
(中铁二院工程集团有限责任公司,四川 成都 610000)
在地铁运行中,接触轨是为列车提供能源的重要系统,确保接触轨的几何参数处于正常状态,对于地铁的安全运行具有重要影响。为了促进地铁的安全运行,需要提高对地铁接触轨几何参数的重视程度,对几何参数的测量技术要点内容进行分析。
1 几何参数测量基本原理
1.1 测量系统数学模型
在城市化进程不断加快的时代背景下,地铁的高效运行为缓解城市交通压力起到了重要的作用。地铁在运行中,需要以接触轨为基础,为列车的安全运行提供重要的能源支持。为了保证地铁的安全运行,必须对接触轨几何参数进行测量,了解几何参数测量的基本原理,建立测量系统数学模型。测量系统数学模型主要包含转换坐标系、镜头畸变以及结构光三角测量三种数学模型,该数据模型以小孔成像原理为基础构建[1]。
1.2 摄像机内参标定
在接触轨几何参数测量中,摄像机是主要的设备之一,为了保证测量数据的准确性,需要对摄像机内部固有的参数进行标定。张正友标定法的效率和提取精度相对较好,因此在摄像机标定中,张正友标定法的应用范围较为广泛。在对摄像机内部固有参数进行标定的过程中,主要包含空间圆的圆心偏差分析、空间圆环的圆心偏差分析、摄像机内参标定原理分析以及摄像机内参标定试验等方面的内容。
以空间圆的圆心偏差分析为例,通过对投影变换的几何关系进行分析可以得知,空间圆的圆心偏差可以数学模型的方式进行表示[2]。
1.3 光平面外参标定
光平面外参标定也是核心的内容之一。在对光平面外参进行确定的过程中,结构光平面和摄像机之间的外层是核心内容。光平面结构参数标定,对于检测数据的精准性具有直接影响,因此在对接触轨几何参数进行测量中,光平面外参标定也是最为主要的内容之一。光平面外参标定主要包含外参标定原理、光平面特征点的提取方法、外参标定试验三方面的内容。
以光平面特征点的提取方法为例,在对外参进行求取的过程中,已经建立了基础的数学模型,为了不断提高外参的精准度,需要对特征点的提取过程进行重点关注。光平面特征点的提取方法主要有直接提取法和间接提取法。
光平面特征点直接提取方法如图1所示。
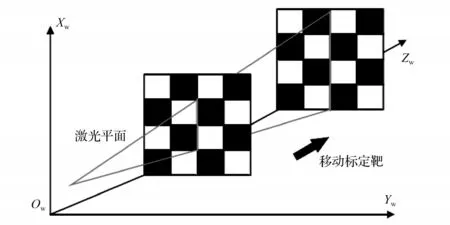
图1 光平面特征点直接提取方法
光平面特征点的间接提取方法如图2所示。
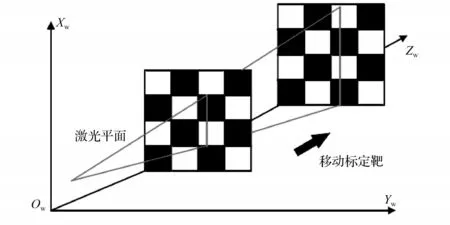
图2 光平面特征点间接提取方法
2 光条主体提取方法
2.1 最大类间方差法
在对地铁接触轨几何参数测量技术进行分析的过程中,光条主体提取方法是核心提取内容之一,只有保证光条主体提取工作的顺利开展,才能保证接触轨几何参数测量工作的顺利开展。最大类间方差法是主要的提取方法之一。
最大类间方差法在实际应用的过程中,以图像的灰度特征为基础,将图像分为前景和背景两个部分,以此实现提取。
2.2 形态学法
在对图像进行处理的过程中,形态学法也是一种常用的处理方法,尤其是在对光源背景进行分离的过程中,形态学法的应用价值较高。在形态学法实际应用中,包含了膨胀、腐蚀等基本运算。形态学法的计算过程与卷积算法的计算过程相类似,都是以模板为核心进行集合运算。通过形态学法的应用,可以在接触轨几何参数测量中,将图像中的噪点有效去除,保留实际需要的光源背景,最终得到需要保留的光条部分。
2.3 散射噪声分割法
在对光条主体提取方法进行分析的过程中可以发现,除了最大类间方差法以及形态学法可以应用于光条主体提取外,散射噪声分割法也是主要的一种提取方法。散射噪声分割法是以感兴趣区域为基础应用的一种光条主体提取方法。在对图像进行处理的过程中,通过最大类间方差法可以有效去除轨道背景和背景光源,但处理后的边缘存在许多毛刺。在对这个位置进行线宽提取的过程中,难度相对较大。针对这种情况,可以对感兴趣区域应用散射噪声分割法进行提取。散射噪声分割法在实际应用中,可以有效去除边缘噪声,得到线宽均匀的光条。将处理后的感兴趣区域,接回到原有图像之内,可以获得所需要的光条主体图像。
3 结构光中心特征点提取方法
3.1 结构光中心特征提取算法
在对地铁接触轨几何参数进行测量中,除了要对几何参数测量基本原理以及光条主体提取方法进行分析外,也需要对结构中心特征点提取方法进行探讨。结构光中心特征提取算法主要指以Heesian矩阵为基础的结构光中心特征提取算法[3]。结构光中心特征提取算法在实际应用的过程中,以曲线拟合法为基本原理。但在对像素法线方向进行定位的过程中,是以图像的二阶偏导数为基础进行定位。与传统的特征提取算法相比,结构光中心特征提取算法在提取精度方面具有较大优势。
3.2 Steger算法优化
在对结构光中心特征点提取方法进行分析的过程中可以发现,结构光中心特征提取算法,是一种应用价值相对较高的提取方法。但随着时代的进步和发展,该算法也必须与实际情况相结合,不断进行优化,才能为接触轨几何参数测量工作的全面开展提供重要的支持。在对Steger算法进行优化的过程中,主要包含光条骨架定位、简化卷积运算两方面的内容[4]。以简化运算为例,传统的Steger法在实际运算中,运算量十分庞大。简化之后,在对某一行光带进行中心点提取的过程中,只需要计算一次,使Heesian矩阵的计算效率得以大幅度提升,对于提高结构光中心提取速度也有积极影响。
3.3 提取试验
在地铁接触轨几何参数测量中,想要对结构光中心特征点提取方法进行验证,就需要开展提取试验,对测量数据的准确性进行有效的评估。在提取试验正式开展中,需要以地铁接触轨模型为前提,利用结构光检测装置对地铁接触轨模型进行试验。地铁接触轨在实际应用的过程中,会存在表面深度差距,因此在试验中不同光条存在偏折和断联的现象。通过提取试验可以得知,以结构光中心特征提取算法为基础的新型算法,在实际应用中,整体的运算时间大幅度缩减,提取效果也得到提高,还能够规避传统端部提取中多个特征点的问题。
4 几何参数特征提取
4.1 提取方法分析
在地铁接触轨几何参数测量中,了解几何参数测量基本原理,确定光条主体提取方法,且对结构光中心特征点提取方法进行优化后,需要对几何参数特征进行提取。常用的提取方法有基于切片统计的特征提取法和建立约束连线的特征提取法。以建立约束连线的特征提取法为例,在对几何参数特征进行提取的过程中,由于特征点较少,在提取中很容易出现较大的误差。针对这种情况,可以利用约束连线的方式提取,能够反映实际几何参数的特征点。
4.2 系统全局标定
全局标定是以ICP算法为基础,实现的系统全局标定。ICP算法于1992年被首次提出,ICP算法主要应用于三维空间的点云配准。通过ICP算法的应用,可以有效实现点集间的配准,在逆向工程、计算机视觉和曲面质量检测等领域,ICP算法都有重要的应用价值。在对系统进行全局标定中,也可以以ICP算法为基本原理,设计新型的标定方法。想要在系统全局标定过程中,对ICP算法进行充分应用,首先要了解ICP算法的基本原理,在试验中对全局标定结果进行检测。通过试验可以得知,以ICP算法为基础的系统全局标定,能够实现点集间高精度的配准,具有良好的稳定性,在系统的全局标定过程中具有较高的应用价值[5]。
5 几何参数检测技术的建设要点
5.1 检测系统硬件建设要点
随着地铁的快速进步和发展,地铁实际运行中承载的人数也越来越多,需要不断提高地铁的安全水平,这也是开展地铁接触轨几何参数检测的重要目的。在几何参数检测中,首先需要对检测部分的硬件进行设计,其次需要对标定及测量试验平台进行设计,保证检测工作的全面开展。检测部分硬件主要包含显示器、控制按钮、水平校准模块、电源、单片机、控制板、激光发射器、CCD相机、微型工控机等硬件设备。
检测系统主要硬件模块如图3所示。
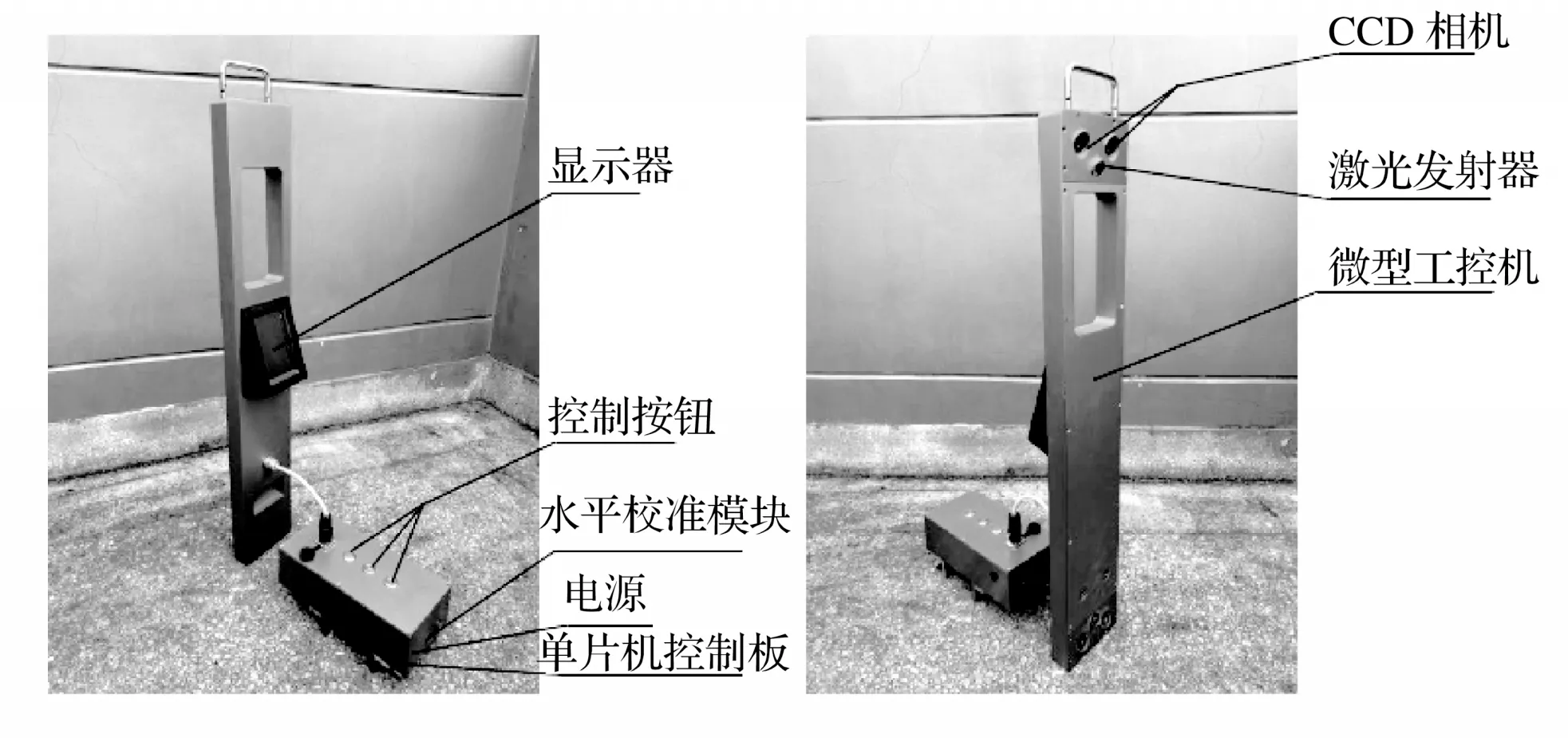
图3 检测系统主要硬件模块
5.2 检测系统软件建设要点
接触轨几何参数检测的全面应用,与检测系统软件具有密切的关系。只有保证软件建设的标准性,才能保证检测工作的顺利开展,这也是保证检测数据准确性的重要基础条件。因此,应当提高对检测系统软件建设要点的关注程度,对软件结构和软件界面进行设计。以软件界面设计为例,软件界面要直观地显示几何参数的测量结果,还要有能够反映测量过程数据、存储情况、通信状态的相关指示标识。用户在实际测量中,才能够对当前的检测状态进行全面了解,对于提高地铁接触轨几何参数检测工作效率具有积极影响,也是在信息化时代背景下提高检测技术应用价值的一种重要方式。
5.3 验证试验
为了对地铁接触轨几何参数检测技术的实际应用价值进行评估,需要通过试验的方式进行验证。在验证中,需要开展传统接触轨测量尺测量试验、系统参数标定、暗光环境下接触轨检测试验、外界光照环境下接触轨检测试验等四方面的内容。验证检测系统在不同的环境下的稳定性,对于提高接触轨几何参数检测数据的准确性具有重要作用。以暗光环境下接触轨检测试验为例,地铁在实际运行中,大部分都是在地下轨道运行,暗光环境下接触轨检测试验具有较高的价值。在整个试验中,室内不能提供光源,且要对测量结果和测量中所消耗的时间进行准确记录。除此之外,为了对系统的稳定性进行检测,同一个位置至少需要测试10次,取10次测试结果的平均值作为最终的检测结果。
6 结语
地铁接触轨几何参数测量工作对于保证地铁安全运行有重要的意义。在实际测量中,要对几何测量参数基本原理进行分析,对光条主体提取方法、结构光中心特征点提取方法以及几何参数检测技术的建设要点进行全面分析,不断提高接触轨几何参数检测工作的准确性,保证地铁的安全运行。
