一种改进的高分辨率SAR图像超像素CFAR舰船检测算法
2023-03-06陆圣涛项德良袁新哲
张 帆 陆圣涛 项德良*② 袁新哲
①(北京化工大学信息科学与技术学院 北京 100029)
②(北京化工大学软物质科学与工程高精尖创新中心 北京 100029)
③(国家卫星海洋应用中心 北京 100081)
1 引言
合成孔径雷达(Synthetic Aperture Radar,SAR)由于其高分辨率以及全天时、全天候特点,拥有很高的军用和民用价值,被广泛应用于各种监测任务中,海洋监测也已成为SAR最重要的应用之一。海洋监测的一个关键方向是对海面舰船的检测,这得到了很多学者的持续关注和研究。由于舰船目标多为金属材质,其雷达反射回波相对较强,在SAR图像上表现为具有较强的后向散射,这也成为当前舰船目标检测方法的主要出发点。由于SAR图像存在较强相干斑噪声和海杂波,舰船目标往往隐藏在噪声或杂波中,使得高海况条件下的舰船目标检测成为难点。在当前可获取的高分辨率SAR图像中,船的细节更为丰富,目标像素也更为分散,旁瓣影响以及海杂波后向散射都给舰船检测带来了挑战。
基于恒虚警率(Constant False Alarm Rate,CFAR)的目标检测方法由于算法简单和自适应等优点,是目前被广泛使用的目标检测方法之一[1-4]。由于背景杂波具有不同的统计分布,研究者提出了大量具有不同局部统计特性的CFAR检测器,如双参数CFAR检测器[5]、OS-CFAR检测器[6]、CA-CFAR检测器[7]等。为了对背景杂波进行更为准确的建模,研究者也提出了许多复杂统计模型,如广义伽马分布[8]、K分布[9]和G0分布[10]等。相比于基于深度学习的舰船检测方法[11-13],CFAR可以进行逐像素的检测,不仅可以确定舰船在图像中的位置,还可以检测舰船内部像素,这也是应用CFAR进行高分辨率SAR图像舰船检测的优势。尽管一些舰船实例分割的深度学习方法[14,15]可以实现逐像素的预测,但是需要大量的训练样本,人工标注的成本较大。此外,深度学习进行逐像素的预测会受到噪声、后向散射强度差异的影响,较难保持舰船内部细节,对近岸舰船目标检测过程中,可能导致陆地区域存在大量虚警。
针对局部均匀杂波中单一目标的情况,传统的CFAR检测方法得到了广泛应用。然而,当使用局部滑动窗口估计海杂波的统计信息时,CFAR检测器会面临很多问题。首先,当存在多个目标时,滑窗尺寸的选择变得极其敏感,难以准确自适应地分离目标和杂波背景区域,获得的海杂波估计样本可能包含其他目标像素,从而错误估计杂波分布的参数,导致检测性能降低[16,17]。为了克服这个缺点,许多研究者致力于改进传统的CFAR算法。Gao等人[18]提出了一种带有初始检测的预处理方法,从而获得准确的杂波分布参数,然而初始检测的阈值很难自适应确定。Cui等人[16]提出了一种用于SAR图像目标检测的迭代处理方法,通过迭代更新目标所在区域以达到优化检测的目的。基于这一思想,An等人[17]提出了一种改进的截尾迭代检测方案,加速了CFAR检测。这些方法虽然提高了检测性能,但由于迭代和滑动窗口技术,导致计算效率过低,同时检测结果对窗口参数仍然敏感。Hou等人[19]提出一种多层CFAR检测方法,避免了传统CFAR检测结果中出现孔洞和裂缝的情况。该方法使用全局CFAR缩短检测时间,但虚警率相对较高。Leng等人[20]提出了一种双边CFAR算法,通过考虑SAR图像中舰船的空间分布,减小相干斑噪声和海杂波对检测的影响。艾加秋等人[21]提出了一种复杂环境下改进的双边CFAR算法,通过强度与空间域信息融合,提高弱目标的对比度,从而提升舰船检测率。
随着雷达成像传感器的快速发展,当前可获取的SAR图像分辨率越来越高,SAR图像舰船检测也迎来了新的挑战。考虑到高分辨率SAR图像的特性,传统CFAR检测器会面临许多问题。一方面,高分辨率SAR图像的相干斑噪声会增加检测结果中的虚警。另一方面,舰船目标在图像中会显现出多个强后向散射,这导致舰船目标在检测结果中无法形成连通区域,丢失了舰船的结构信息。此外,仅考虑舰船和海杂波之间的像素强度差异,很难消除陆地区域人造目标的虚警[22]。理论上来讲,海面上同一舰船目标的像素应该共享相同的背景杂波统计参数,然而传统CFAR方法没有考虑待测像素的邻域关系,采用滑窗策略选取杂波区域,这容易造成杂波参数估计不准确。最后,传统CFAR对每个像素点都要进行一次杂波参数估计,这种策略较难适应高分辨率SAR图像的检测效率需求。
近年来,超像素作为一种过分割处理方法被广泛应用于图像处理,包括光学图像和SAR图像,取得了令人满意的结果[23-26]。由于超像素实现相似像素的聚类并能很好地贴合目标边界进而实现准确分割,因此能反映目标的边界和局部细节特征。理论上,SAR图像中的舰船目标都可以用一个超像素或一些连通的超像素来描述。简单线性迭代聚类(Simple Linear Iterative Clustering,SLIC)[27]是一种经典的自然图像超像素生成方法。但是,单通道SAR图像只有灰度信息且存在固有的相干斑噪声,将SLIC直接应用于高分辨率SAR图像并不能取得令人满意的结果。为了应对这个问题,一些基于SLIC的方法被提出并被证明适用于SAR图像的超像素生成[28-31]。在这些方法中,研究者大多用SAR图像像素的相异度代替原始SLIC中的欧氏距离,以此克服相干斑噪声的干扰。例如,文献[28]定义了SAR图像的像素强度和局部信息相异度,即使在噪声干扰下也能取得稳定的超像素分割结果。一些方法在重新设计像素相异度的基础上,将SAR图像的同质性引入到距离测度中,使得超像素的生成能够适应不同的SAR场景,例如文献[31]中的方法。
目前,已有一些基于超像素的CFAR目标检测方法的研究。Cui等人[32]提出了一种基于超像素建模的CFAR算法,建立了超像素级混合伽马分布来描述杂波统计模型,对陆地目标的检测具有较大优势。Yu等人[33]使用超像素估计杂波分布参数,结合改进的双参数CFAR方法进行目标检测。Pappas等人[34]使用超像素代替矩形滑窗来定义CFAR保护区域和背景区域,以此减少误检。Li等人[35]以超像素代替单个像素作为基本处理单元进行SAR图像舰船检测,在检测性能和计算效率方面优于传统CFAR方法。Liu等人[36]采用多尺度超像素对SAR图像进行海陆分割,结合CFAR检测器对岸边舰船目标进行检测。Li等人[37]将超像素进行分类,自适应选取足够数量的纯杂波超像素用于计算检测阈值。Li等人[38]将超像素分割作为预处理过程,在伽马分布的假设下,对背景窗口中的超像素进行杂波自动截断,以此保留真实的海杂波样本,对多目标情况下的舰船检测取得了较好的效果。尽管上述基于超像素的CFAR检测方法可以提高舰船检测的性能,但大多数方法仍是通过滑动窗口方案实现的,即将窗口设置在超像素上移动,检测结果对窗口尺寸比较敏感。对于高分辨率SAR图像而言,仍存在计算效率过低的问题。此外,大量的人造目标虚警难以消除,检测结果的虚警率较高。
为了解决上述问题,本文将超像素应用到CFAR目标检测中,提出了一种针对SAR图像舰船目标的无窗快速CFAR检测方法。该方法使用作者先前提出的基于密度的快速噪声空间聚类(Density Based Spatial Clustering of Applications with Noise,DBSCAN)超像素生成方法[39]生成SAR图像的超像素,该方法可以较好地克服相干斑噪声干扰,对不同场景SAR图像超像素分割具备鲁棒性。同时,DBSCAN在融合阶段将局部小超像素合并到其邻域超像素中,使最终的超像素分割更为紧凑和准确,有利于后续CFAR检测较好地保留舰船目标的边界和内部细节。在超像素生成之后,本文定义了超像素相异度,即使在多目标的情况下也可以自适应选取杂波超像素,从而估计每个像素的杂波分布参数。同时,超像素内部像素的杂波分布参数共享,大大提升了CFAR检测效率。此外,本文定义了局部超像素对比度来优化CFAR检测,从而消除大量陆地区域人造目标虚警。
2 传统CFAR检测算法
CFAR检测算法是一种适应性阈值检测方法,其工作原理是根据假设的背景概率密度函数p(x)估计目标周围的统计分布,从而保持恒定的虚警率Pfa。CFAR检测算法将单个像素点的灰度值与某一门限进行比较,从而判断该像素点是否属于目标像素点。确定这一门限需要3个要素,分别是预先设定的虚警率Pfa、假定的杂波统计模型、CFAR滑窗检测器。传统CFAR检测算法的流程如图1所示。

图1 传统CFAR检测算法通用流程Fig.1 General flow of the traditional CFAR detection algorithm
传统CFAR检测器通过滑动窗口遍历SAR图像中所有像素点,实现逐像素的目标检测。目前最常用的CFAR滑动窗口是空心滑窗,由内而外可分为3个组成部分,分别是目标区域、保护区域和背景杂波区域,如图2所示。
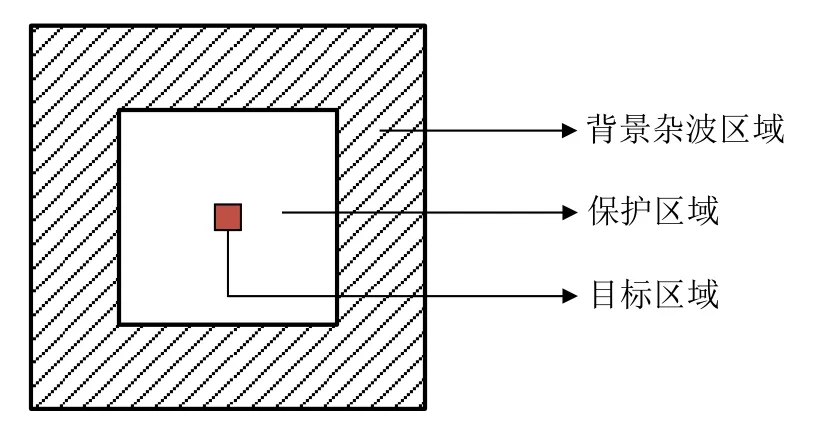
图2 传统CFAR检测器滑动窗口示意图Fig.2 Schematic diagram of the sliding window in the traditional CFAR detector
设定虚警率为Pfa,背景杂波区域的概率密度函数为p(x),则可以得到:
此时根据CFAR检测原理,判别依据可以表示为
其中,x为被检测像素点灰度值,T为依据式(1)求出的检测阈值。传统CFAR算法对滑窗尺寸的选择极其敏感,难以准确自适应地分离目标和局部背景区域,从而难以得到准确有效的杂波分布参数。同时,传统CFAR方法对每个像素点都要进行一次杂波参数估计,这种逐像素滑窗策略的检测效率过低。
CFAR检测器中使用的典型统计模型包括高斯分布、瑞利分布、K分布和G0分布等。为了提高背景杂波拟合精度,一些复杂分布模型被提出,例如广义重尾瑞利分布模型[40]、广义伽马分布模型以及广义伽马混合分布模型[41]。混合瑞利分布可高效准确地用于高分辨率SAR图像的杂波建模[42],在文献[42]中,作者通过海杂波真实数据拟合分析,详细验证了混合瑞利分布适用于各种复杂SAR场景的杂波建模。同时将混合瑞利分布应用于CFAR目标检测中,证明了其在海杂波建模和CFAR检测中的有效性。在混合瑞利分布中,每个瑞利分布按其区间内的数据量成比例加权,因此概率密度函数和累积分布函数形式如下:
式中,Ma为混合模型中瑞利分布的数量,k为混合瑞利分布指代参数,wk为第k个瑞利分布的权重,λk为第k个瑞利分布的比例参数。混合模型中权重计算方式如下:
3 基于超像素的快速CFAR舰船目标检测算法
本文在传统CFAR检测算法的基础框架上,提出了一种基于超像素无窗快速CFAR的目标检测算法,避免了传统CFAR算法的滑窗设计,提升了CFAR检测的性能,具体流程如图3所示。首先,利用作者先前提出的快速DBSCAN超像素生成方法对SAR图像进行分割。由于阴影超像素没有雷达回波,会干扰后续的杂波参数估计,因此本文在超像素生成之后进行了阴影超像素的去除。之后,通过聚类将超像素分为潜在目标超像素与背景超像素,后续的CFAR检测只针对筛选出的潜在目标超像素,这大大提升了检测效率。为了自适应选取纯杂波超像素,本文定义了超像素相异度,即使在多目标的情况下也可以准确估计待测像素的杂波分布参数。由于同一超像素中的待测像素共享相同的杂波背景像素,因此不需要逐像素地估计杂波分布参数,从而提高了检测效率。此外,基于SAR图像变异系数,本文定义了一种局部超像素对比度来优化CFAR检测,以此消除大量人造目标虚警。

图3 本文提出的基于超像素无窗快速CFAR的目标检测算法流程Fig.3 Flow chart the proposed superpixel non-window fast CFAR strategy
3.1 SAR图像快速DBSCAN超像素分割
文献[39]中的快速DBSCAN超像素生成算法包括聚类和融合两个阶段。在聚类阶段,针对SAR图像的特性对DBSCAN策略进行了优化,提出了一种新的自适应像素相异度计算方法。融合阶段,在初始超像素的基础上,定义了一种新的超像素相异度,将局部小超像素融合到其邻域超像素中,使最终的超像素分割更为紧凑和规则。值得指出的是,为了使生成的超像素可以较好地保持图像边界,文献[39]中像素相异度和超像素相异度均考虑了SAR图像的边缘信息。然而,为了简化过程,同时提升超像素分割的效率,本文没有考虑超像素生成的边缘损失,因此像素相异度Ω(i,j)可以定义为
式中,像素点i与j的强度相异值δ(i,j)可以由其为中心的5×5像素块Pi与Pj的似然比检验统计量定义,数学形式如下:
聚类阶段是一种区域生长过程,在获得足够多具有不同标签的像素后,生成了初始的超像素。融合阶段将超像素进行合并以消除局部小超像素,如果一个初始超像素内的像素数小于一个阈值,将此超像素与其相异度最低的邻接初始超像素合并,得到最终的超像素结果。超像素相异度Ω(SPm,SPn)定义为
式中,size(·)代表超像素大小。从式(9)可以看出,超像素相异度考虑了强度值与同质性信息,因此两个具有相似均匀度和散射强度的超像素很容易被合并。有关实现快速DBSCAN超像素生成的更多详细信息,请参见作者先前工作文献[39]。
3.2 阴影超像素去除
SAR图像中的阴影区域没有雷达回波,无法显现出目标散射回波成像的纹理信息,如果将其作为背景杂波则会干扰统计分布参数的估计,导致CFAR检测性能降低。因此,本文在选择杂波超像素之前应先消除没有雷达回波的阴影超像素。通过设定一个超像素平均强度阈值Tsh来判断该超像素是否属于阴影区域,平均像素强度低于Tsh则被视为阴影超像素,将其从超像素集中去除。
3.3 杂波超像素选取与局部对比度图计算
滑动窗口策略在传统CFAR算法中非常普遍,然而滑窗策略导致CFAR检测算法对窗口参数十分敏感,并且逐像素的检测过程效率较低。此外,随着SAR图像分辨率的提高,像素级CFAR很难在保持目标形状完整的同时抑制虚警。针对这些问题,本文使用超像素代替传统方法中的滑窗,有利于杂波区域的选取。
杂波超像素的选取对杂波分布参数估计至关重要,如何选择纯净的杂波区域是本文重点要解决的问题。如图4所示,对于待测超像素,通常有3种方法可以选取杂波超像素,其中杂波超像素在图4中以灰色表示。如图4(a)所示,Pappas等人[34]提出了一种拓扑结构,其中超像素的大小远大于舰船目标,以此确定相应的保护区域和背景杂波区域。这种方法保证了舰船目标包含在一个超像素中,仅能处理单一目标的情形,局限性较大。Yu等人[33]提出了一种与传统CFAR方法类似的局部滑窗,如图4(b)所示。这种方法需要根据SAR图像中的目标大小确定窗口尺寸,无法自适应地选取杂波区域且计算效率较低。如图4(c)所示,Li等人[35,38]提出使用邻域策略选取杂波超像素,根据巴氏距离来确定相邻的超像素是否为杂波区域。
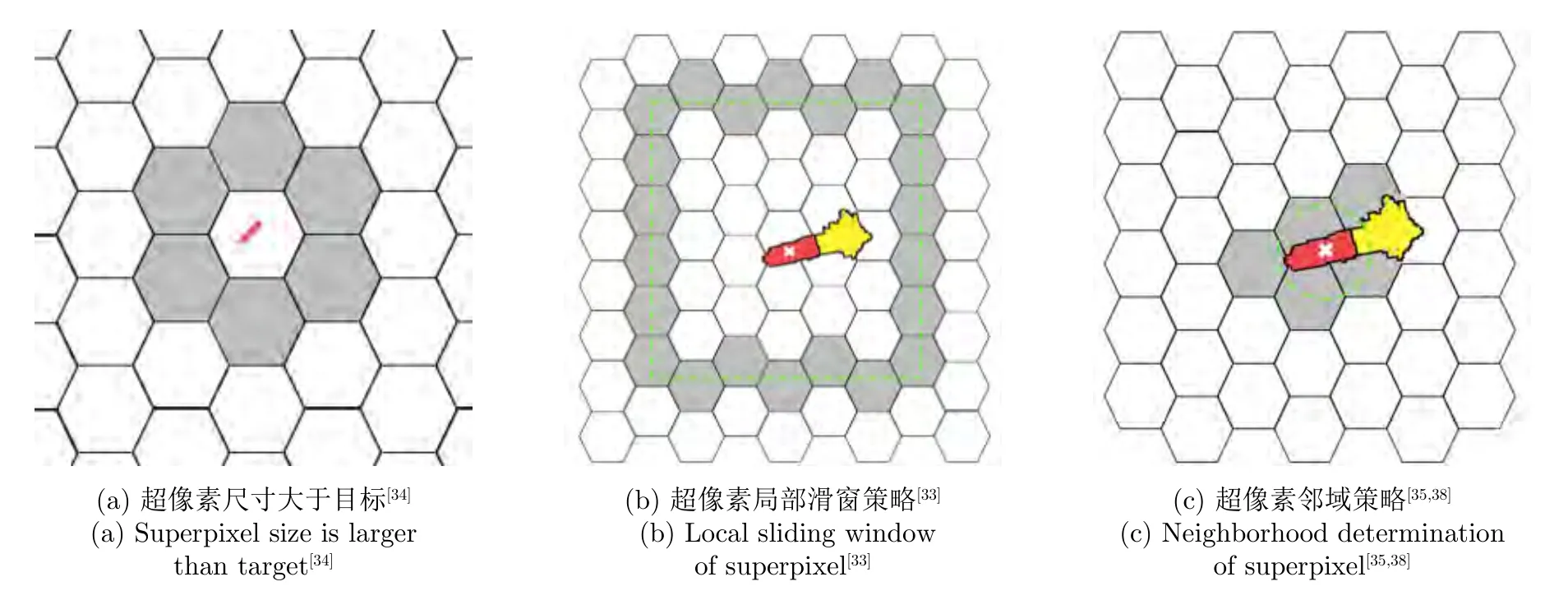
图4 杂波超像素选取策略Fig.4 Strategies for clutter superpixels determination
本文考虑到杂波超像素的选取效率,同时为了消除滑窗对CFAR检测的影响,选择以邻域策略来选取杂波超像素。为了使得杂波分布参数的估计更准确,我们提出用式(9)中的超像素相异度来选取纯净的杂波超像素。为了进一步验证该超像素相异度的有效性,本文选取SAR图像中的一艘舰船目标进行分析,图5给出了超像素相异度示意图。超像素①分割出了部分舰船目标,超像素④为背景区域,它们之间的平均强度值I¯有较大差异,导致式(10)的强度差异度量值σ较大,同时超像素同质性度量值H之间的差值也会受到影响,导致超像素相异度Ω具有较大的值。与此相反,超像素①与超像素②、超像素③与超像素④之间的强度值差异较小,最终得到较小的超像素相异度值。因此,根据超像素相异度可以选取纯净的杂波超像素,从而可以提升杂波分布参数估计的准确性。此外,一个超像素内的像素共享相同的杂波分布参数,这进一步加速了CFAR检测。
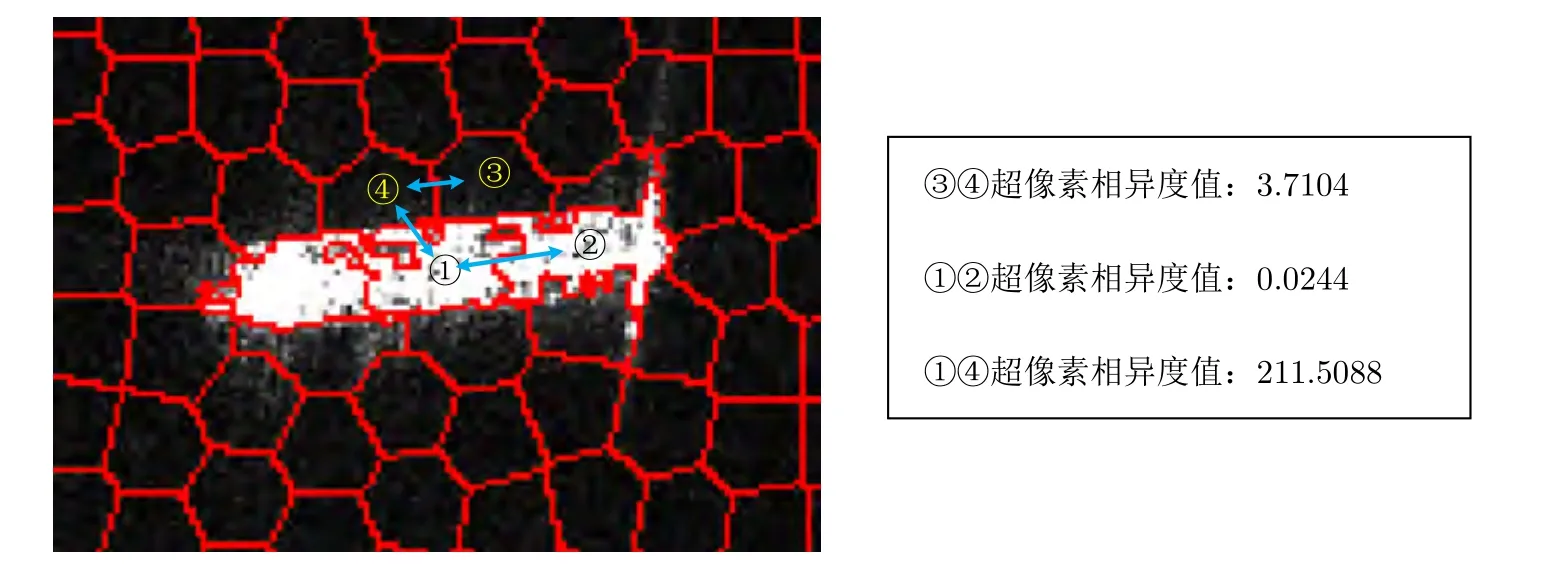
图5 超像素相异度有效性分析示意图Fig.5 Schematic diagram of superpixel dissimilarity effectiveness analysis
在生成超像素之后,得到了全体超像素集Rall,然后采用K-means聚类算法,根据每个超像素的平均强度值将Rall分成两个子集Rtarget和Rbackground。我们认为舰船目标与陆地区域人造目标都被包含在平均强度值相对较高的超像素集Rtarget中,所以将Rtarget作为潜在目标超像素集。背景海杂波区域或者陆地上的裸地、道路等被包含在平均强度值较低的超像素集Rbackground中,在后续的CFAR检测中不对其进行处理。
对Rtarget中每一个潜在目标超像素SPi,本文定义了一个空集Sclutter去存储杂波超像素。对SPi的每一个属于Rbackground的邻接超像素计算其与SPi的相异度,如果相异度值大于预设值Thclu,那么将该邻接超像素视为杂波超像素,添加进Sclutter。找到所有邻接杂波超像素后,以邻接的杂波超像素作为中心,计算其与邻域的属于Rbackground的超像素之间的相异度,将相异度值小于Tlclu的超像素作为新的杂波超像素添加进Sclutter。这个迭代过程直到满足预设的Sclutter中超像素数量最大值条件时停止。对于每个超像素,可以通过以下方式获取邻接的超像素:对于当前超像素中的每个像素,选取其邻域的8个像素,如果它们与中心像素具有相同的超像素标签,则移动到下一个像素,否则,具有不同超像素标签的邻域像素可以被视为邻接超像素中的像素。杂波超像素选取的算法流程如表1所示。
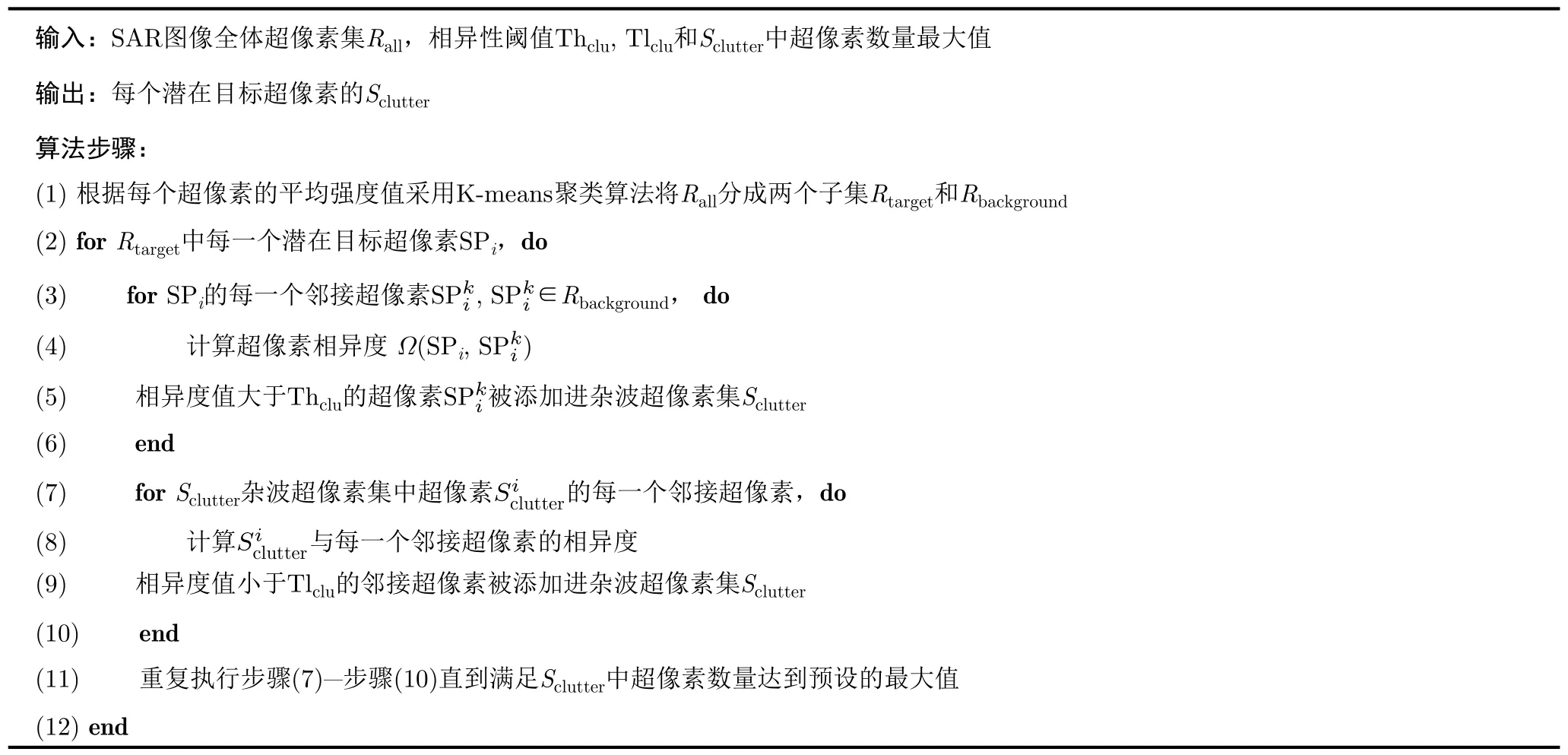
表1 杂波超像素选取算法Tab.1 The algorithm of clutter superpixels selection
本文杂波超像素选取方法与Li等人[35,38]的策略存在区别,本文方法首先将生成的超像素分类为潜在目标超像素和背景超像素,因此只对潜在目标超像素进行目标检测,这可以避免对背景超像素的计算,从而加速目标检测。与图4(c)不同,本文方法在选取杂波超像素时不仅考虑了潜在目标超像素的邻接超像素,还考虑了潜在目标超像素的非邻接超像素。因此,在处理多目标情形时,杂波超像素可以包含更多非局部信息,从而估计出更准确的杂波模型参数。
针对陆地区域人造目标等虚警问题,本文提出一种局部超像素对比度计算方法来增强目标超像素。假设舰船目标位于局部超像素强度值相对较低的海域,而陆地区域人造目标的周围则是强度值相对较高的超像素。基于这一假设,本文在像素层面与超像素层面结合,考虑SAR图像变异系数,定义了局部超像素对比度来增强舰船目标与背景之间的差异,从而优化CFAR检测结果,去除陆地虚警。针对潜在目标超像素SPm中的像素点x计算局部对比度值,定义为
式中,Ω(SPm,SPn)代 表超像素相异度,ζ(x)代表像素点的局部变异度,将其定义为
式中,CoV表示SAR图像像素点局部变异系数,由局部像素点强度值的标准差与均值计算得出,本文中局部区域大小设定为7 pixel×7 pixel。κspatial为空间因子,在本文中设定为0.4。从式(11)中对Clocal(x)的定义可以看出,像素点x的局部对比度与其所在超像素的相异性和其自身局部变异性有关。对于海域中的舰船,超像素相异性值大,变异性度量值大,导致局部对比度较大。对于陆地上的人造目标,由于其像素点局部的变异系数CoV很大,导致其变异性度量值较小,最终得到相对较低的局部对比度值。根据上述分析,局部对比度图对潜在舰船目标的检测具有显著增益效果。
3.4 像素到超像素检测决策
在获得每个潜在目标超像素的杂波超像素后,可以进行后续的CFAR检测。由于混合瑞利分布适用于高分辨率SAR图像建模,所以本文杂波统计模型采用Ma=3的混合瑞利分布。混合瑞利分布的权重和比例参数可以通过式(5)与式(6)来估计,其中用于估计的像素来自选取到的杂波超像素。
针对每一个待测超像素SPm,相应的检测阈值Tcfar可以通过预设的虚警率Pfa求得,具体形式为
式中,(x)代表混合瑞利分布的概率密度函数,形式如式(3)所示,F(x)是对应的分布函数。基于CFAR检测标准,每个待测超像素SPm中像素点x可以判定为
式中,I(x)为像素x的强度值。基于同一超像素中的像素具有相似强度信息的假设,因此可以使用相同的检测阈值来判断SPm中的像素,可显著提升决策效率。为了消除陆地区域人造目标的虚警,将提出的局部超像素对比度考虑进CFAR检测中,以此优化检测结果。优化过程如式(16)所示:
由于陆地区域人造目标具有相对较低的局部对比度值,因此,式(16)中的决策可以进一步抑制虚警并增益舰船目标检测。超像素中像素具有相似的后向散射强度,基于此,本文认为同一个超像素应被标记为同一个类别,所以我们设计一种后处理方法将像素级检测结果映射到超像素层面。具体做法如下:如果在式(16)中被检测为目标像素的像素数量超过一个阈值,则对应的超像素被视为目标超像素,其中的所有像素被标记为目标,否则,超像素被视为背景。通过将像素检测结果映射到超像素层面,可以进一步消除孤立的虚警像素,降低虚警率。
4 实验与分析
4.1 实验数据介绍
本文使用5幅真实SAR图像进行实验验证。第1幅图像是分辨率为1 m的星载TerraSAR X波段SAR数据,图像大小为625 pixel×515 pixel,如图6(a)所示。第2幅SAR图像同样是星载TerraSAR数据,分辨率为1 m,图像大小为2522 pixel×1411 pixel,如图6(b)所示。第3幅SAR图像是高分3号(GF-3)C波段数据,分辨率为3 m,图像大小为2012 pixel×1721 pixel,如图6(c)所示。第4幅SAR图像同样是分辨率为3 m的GF-3 C波段数据,图像大小为1041 pixel×894 pixel,如图6(d)所示。第5幅图像由C波段Sentinel-1A星载SAR传感器采集,分辨率为20 m,图像大小为680 pixel×690 pixel,如图6(e)所示。
值得指出的是,5幅图像都包含部分陆地区域,其中,图6(d)陆地区域散射强度较大,图6(c)中存在一些小型船只,图6(e)中舰船目标较密集,部分舰船存在较强的旁瓣干扰,可以用于验证本文方法对多尺度舰船检测和存在旁瓣影响下密集目标检测的性能。图7展示了5幅图像的真值图,白色区域代表真实的舰船像素。本文真值图由专家在SAR图像上手动标记。

图6 实验采用的不同波段不同分辨率的SAR图像Fig.6 The SAR images with different bands and different resolutions in the experiment
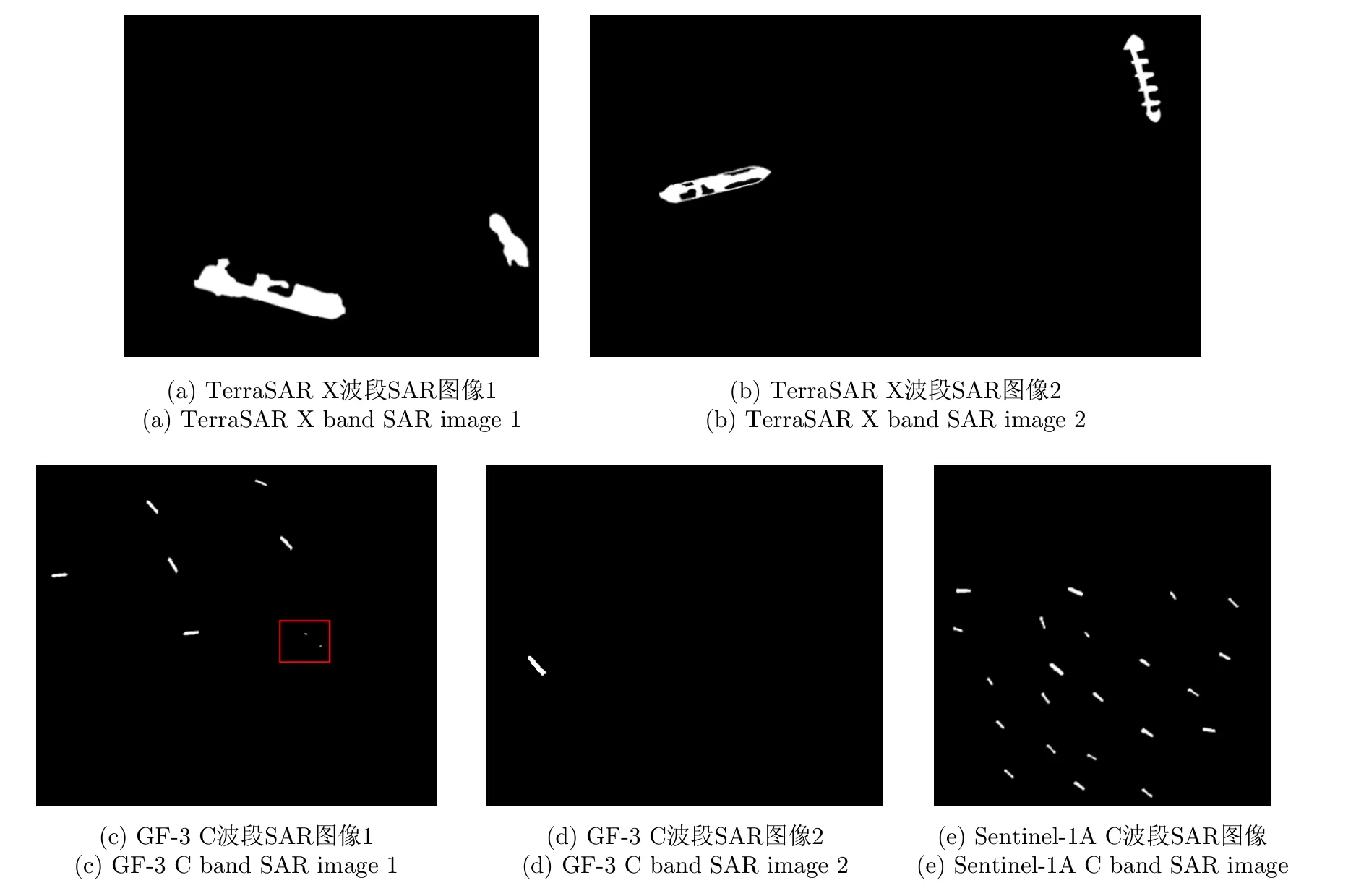
图7 5幅SAR图像的真值图Fig.7 The ground truth map of the SAR images
4.2 不同方法对比实验分析
图8--图12展示了本文方法对不同SAR图像的检测结果,包括最终的结果图和中间结果图。图8展示了第1幅TerraSAR X波段SAR图像的检测结果,实验设置生成的超像素数量为5000,分割结果如图8(a)所示。从分割结果图可以看出,快速DBSCAN超像素生成方法可以生成精细的超像素,这些超像素很好地附着在图像边界上,保留舰船目标形状。图8(b)展示了本文方法筛选出的潜在目标超像素,从中可以看出,本文方法中并不是所有的像素都参与检测,而是通过聚类将平均强度值较高的超像素筛选出来进行后续CFAR检测,所以与传统的CFAR检测器相比,本文方法检测过程更高效。图8(c)展示了局部对比度图,从中可以看出,舰船的对比度较高,而陆地区域的对比度相对较低,这有利于去除陆地区域人造目标虚警。图8(d)展示了最终的超像素级检测结果图,从中可以看出,舰船的细节被很好地检测出来,陆地上的树林以及具有较强后向散射的人造建筑等目标被很好地消除,有效抑制了虚警。

图8 TerraSAR X波段SAR图像1检测结果图Fig.8 The results of TerraSAR X band SAR image 1 with the proposed method
TerraSAR X波段SAR图像2为舰船停靠码头的场景,同时陆地上存在较多人造建筑与植被。本文方法的检测结果如图9所示,其中超像素数量设置为12000。图9(b)展示了聚类得到的潜在目标超像素结果图,从中可以看到,一些较强后向散射的目标被判断为潜在目标进行后续的检测。通过局部对比度图的约束,在最终的超像素级CFAR检测结果中较好地消除了虚警,如图9(c)和图9(d)所示。
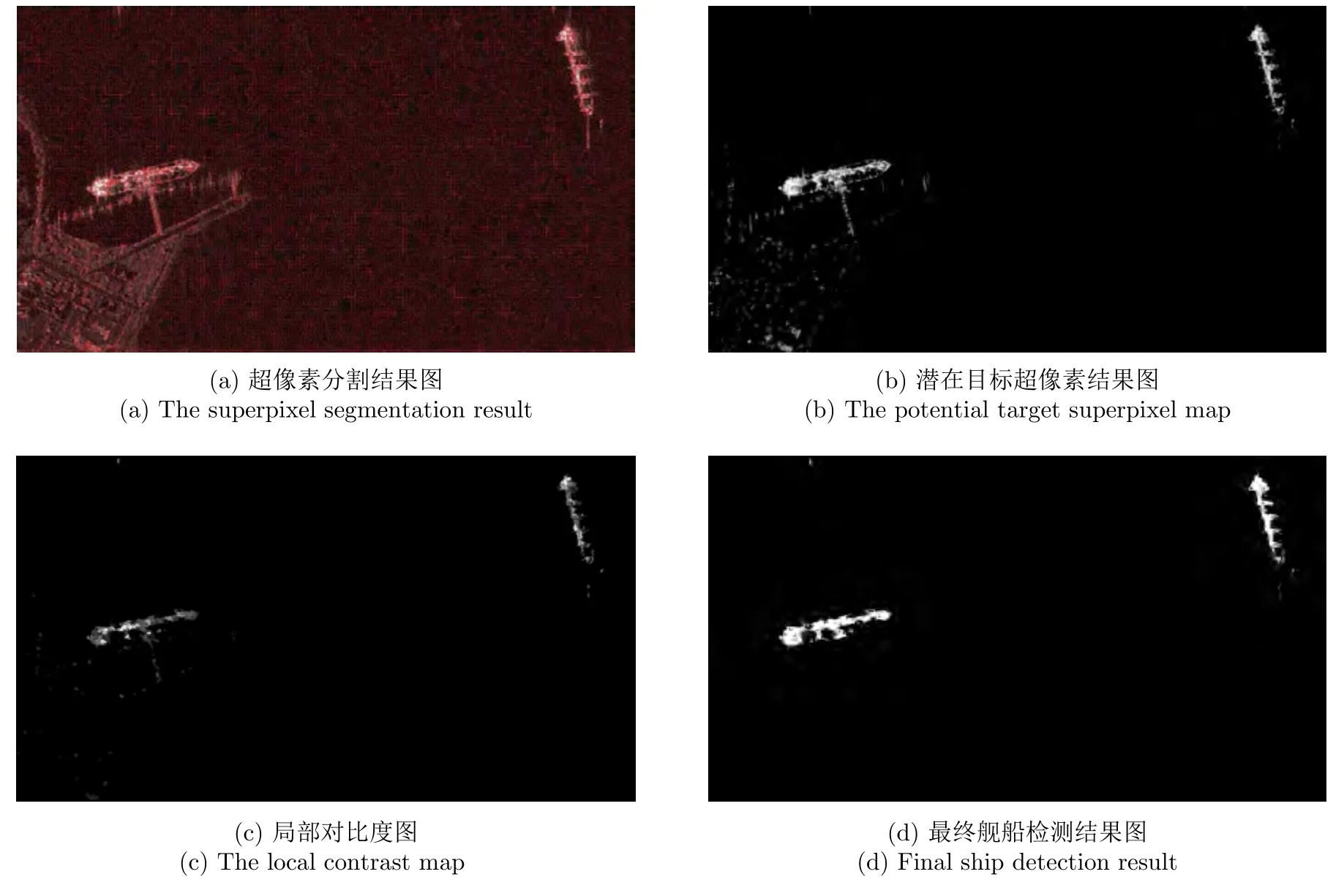
图9 TerraSAR X波段SAR图像2检测结果图Fig.9 The results of TerraSAR X band SAR image 2 with the proposed method
图10展示了GF-3 C波段SAR图像1的舰船检测结果,图像场景中包含一片城市区域和8艘多尺度近海舰船目标,实验设置超像素数量为10000。如图10(b)所示,在CFAR检测之前将大部分背景超像素筛除,凸显出船与陆地区域具有较强后向散射的人造目标,以便提升检测的效率。通过计算局部对比度进行约束,最终得到如图10(d)所示的舰船检测结果。由于超像素分割的准确性,小型船只均被检测出来,验证了本文方法对多尺度舰船检测的能力。

图10 GF-3 C波段SAR图像1检测结果图Fig.10 The results of GF-3 C band SAR image 1 with the proposed method
图11展示了GF-3 C波段SAR图像2的舰船检测结果,图像场景中包含一片城市区域和一艘海上船只,实验设置超像素数量为9000。如图11(b)所示,在CFAR检测之前将大部分背景超像素筛除,凸显出船与陆地区域具有较强后向散射的人造目标,以便提升检测的效率。由于城市多为异质区域,通过计算局部对比度进行约束,最终得到如图11(d)所示的舰船检测结果。

图11 GF-3 C波段SAR图像2检测结果图Fig.11 The results of GF-3 C band SAR image 2 with the proposed method
图12展示了Sentinel-1A C波段SAR图像的检测结果,图像场景包含一些不同大小的舰船和两座岛屿,实验设置超像素数量为6000。在图12(b)中,通过潜在目标超像素的筛选,消除了大部分背景区域。在局部对比度图中,岛上的虚警被抑制,从而优化检测结果。从图12(d)可以看出,由于超像素的约束,本文方法可以有效抑制旁瓣干扰。
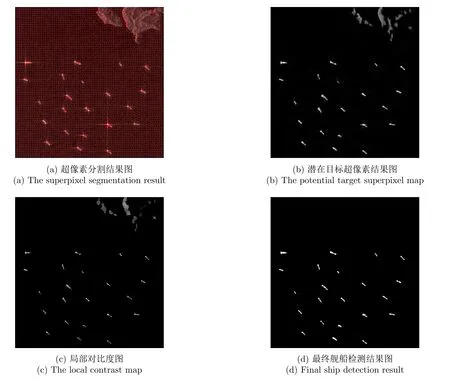
图12 Sentinel-1A C波段SAR图像检测结果图Fig.12 The results of Sentinel-1A C band SAR image with the proposed method
为了验证本文方法的有效性,这里采用传统双参数CFAR检测方法,SP-CFAR方法[34]以及基于截断伽马分布的超像素CFAR方法(SP-CFAR-TG)[38]作为对比方法。传统双参数CFAR的滑动窗口大小是根据不同图像的信息和用户经验选择的。为保持一致性,SP-CFAR方法和SP-CFAR-TG方法超像素分割结果与本文方法相同,其余参数根据参考文献设定。3种对比方法针对上述5幅SAR图像的检测结果如图13-图17所示。

图14 3种对比方法对TerraSAR X波段SAR图像2的检测结果Fig.14 The detection results of TerraSAR X band SAR image 2 with three compared methods

图15 3种对比方法对GF-3 C波段SAR图像1的检测结果Fig.15 The detection results of GF-3 C band SAR image 1 with three compared methods
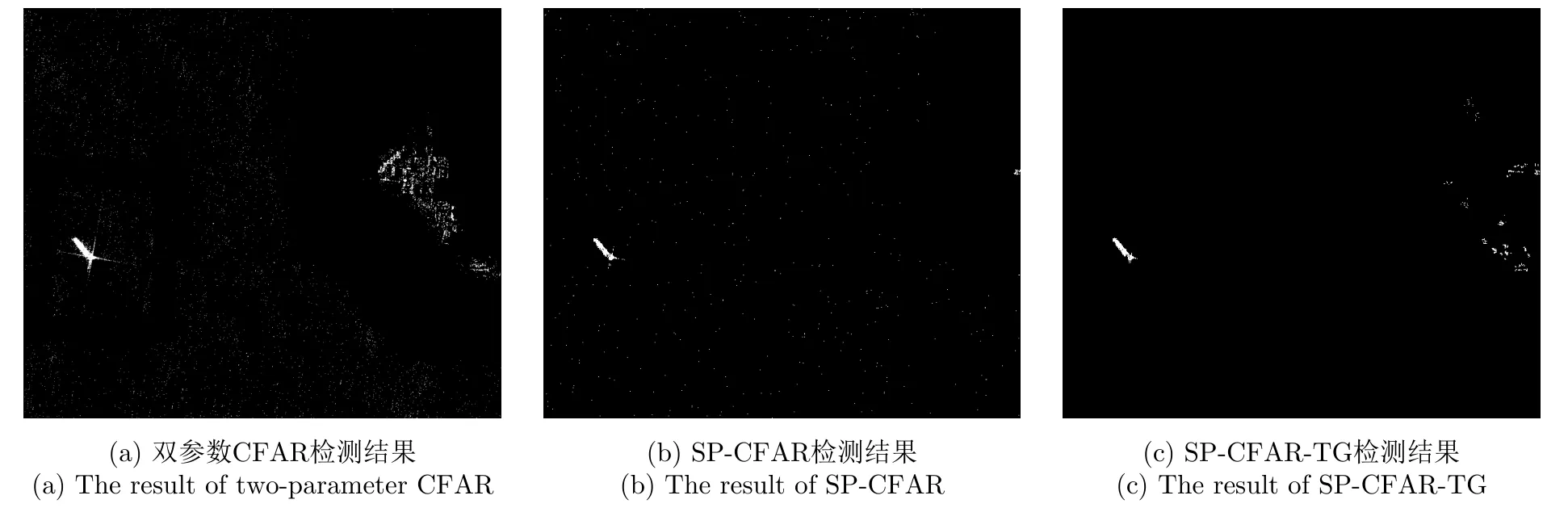
图16 3种对比方法对GF-3 C波段SAR图像2的检测结果Fig.16 The detection results of GF-3 C band SAR image 2 with three compared methods

图17 3种对比方法对Sentinel-1A C波段SAR图像的检测结果Fig.17 The detection results of Sentinel-1A C band SAR image with three compared methods
从检测结果中可以看出,传统双参数CFAR检测方法属于逐像素检测策略,不能很好地捕捉目标细节、消除虚警,因此,检测结果中目标由裂缝和孔洞组成。传统双参数CFAR方法仅考虑像素强度值,这对相干斑噪声、陆地区域人造目标和具有较高后向散射的森林区域非常敏感,因此检测结果中存在许多虚警。此外,由于滑动窗口大小应根据图像分辨率和目标大小进行设置,所以该方法检测效果对局部滑动窗口大小非常敏感。超像素可以有效地分割出均匀的区域,所以SP-CFAR和SP-CFARTG检测结果中目标的形状和细节被保留下来。然而,一些强后向散射的超像素在检测过程中被视为舰船目标,所以在密集舰船和近岸舰船场景中,存在漏检和虚警。本文方法中杂波超像素是通过迭代的方式选择的,这样可以更精确地选择杂波区域去估计杂波分布参数。此外,本文提出的局部对比度可以有效抑制陆地虚警。因此,与上述3种方法相比,本文方法取得了较好的舰船检测效果。
为了定量评估上述舰船检测算法的效果,本文采用FPR (False Positive Rate)与TPR (True Postive Rate)作为定量评价指标,两者定义如下:
式中,Nclutter-pixel和Nobject-pixel分别代表背景像素总数和目标像素总数,Nfalse-object和Ntrue-object分别代表背景像素误检为目标像素的个数和正确检测到的目标像素的个数。FPR越小表明检测结果虚警率越低,TPR越高表明检测结果准确率越高。4种方法的定量性能比较如表2所示。
从表2可以看出,由于不能处理陆地上的人造目标虚警,传统的双参数CFAR检测器的虚警率远远高于其他方法,尤其是对于具有复杂陆地场景的第1幅TerraSAR数据。在SP-CFAR和SP-CFAR-TG的评估结果中,高分辨率TerraSAR数据仍然存在一些虚警,这表明两种方法对港口、城市、森林等陆地区域人造目标的虚警消除存在一些缺陷。相比之下,由于局部对比度图和准确的杂波区域选择过程,本文方法获得了较好的结果。

表2 4种目标检测算法性能比较Tab.2 Quantitative comparisons of four target detection algorithms
接收机性能(Receiver-Operating-Characteristic,ROC)曲线显示了TPR随FPR的变化情况,可以衡量检测器的工作性能,本文实验的方法在设置不同虚警率的情况下对TerraSAR X波段SAR图像1舰船检测的ROC曲线如图18所示。由FPR与TPR的定义可知,ROC曲线越接近左上角的(0,1)点,算法在衡量准确率与虚警率之间的性能更好。通过ROC曲线可以看出,本文方法在较低FPR的情况下仍然可以取得较高的TPR值,相比其他3种方法,所提出的方法具有较好的检测性能。

图18 不同方法对TerraSAR X波段SAR图像1舰船检测的ROC曲线Fig.18 The ROC curve of ship detection in TerraSAR X band SAR image 1 by different methods
4.3 概率密度拟合性能分析
为了验证本文采用的Ma=3混合瑞利分布可以有效地拟合真实海杂波数据,本节将混合瑞利分布与其他3种常用的分布模型进行对比,选取如图19(a)所示的大小为256 pixel×256 pixel的真实海面区域进行直方图拟合测试,结果如图19(b)与图19(c)所示。
高分辨率SAR图像的细节丰富,海杂波数据统计直方图显现出重尾特性。图19(b)中,4种统计分布模型在一定程度上都可以拟合海杂波数据,而混合瑞利分布与真实海杂波数据的统计直方图更为接近,验证了其对高分辨率SAR图像海杂波具有更好的概率拟合性能。进一步计算各统计分布的K-S因子、绝对值误差、KL距离和Pearson检验统计量并进行归一化处理,以便对拟合性能进行定量分析,结果如图19(c)所示。从结果中可以看出,高斯分布由于形式简单,在4种统计分布模型中的效果较差。混合瑞利分布由于其较强的适应能力,可以对高分辨率SAR图像中的海杂波进行精确建模,在4种统计分布模型中取得了较好的效果。
4.4 参数敏感性分析
本文方法涉及的参数包括生成超像素的数量,阴影超像素去除阈值Tsh,杂波超像素相异度阈值Thclu与Tlclu,Sclutter中超像素数量最大值和后处理中超像素内部目标像素的数量。如前所述,阴影超像素去除阈值Tsh很容易确定,可以根据数据中阴影区域的平均像素强度进行设置。Sclutter中超像素数量最大值会影响杂波分布参数估计的准确性,在牺牲时间成本的情况下,设置较大的数值可以估计出更准确的杂波模型参数。本文通过权衡杂波模型参数估计的准确性和检测的时间成本,设置Sclutter中超像素数量最大值为10。在后处理阶段,超像素内部目标像素的数量会影响到最终的检测结果图。考虑到每个超像素大小不一,公平起见,设置了一个比率作为后处理的阈值,即检测到的目标像素在超像素内所有像素中所占的比重。实验结果表明,这个比率阈值设置为0.7可以适应绝大多数SAR图像。
杂波超像素相异度阈值Thclu与Tlclu与式(9)和式(10)中超像素大小和平均强度有关,应根据SAR图像实际的场景确定。在实验中,本文选择了一些典型区域来计算超像素相异度,以此来辅助Thclu与Tlclu的设定,从而选择更准确的杂波超像素。通常来讲,Thclu设置相对较高的数值,同时Tlclu设置相对较低的数值比较符合实际需要。
4.5 阴影超像素去除效果分析
阴影超像素没有雷达回波,无法显现出纹理信息,若将其放入杂波超像素的选取过程中,则会干扰统计分布参数估计的准确性,影响最终的舰船检测结果。为了讨论阴影超像素对检测性能的影响,本文设置阴影超像素去除阈值Tsh=10,对上述5幅图像进行阴影超像素去除前后的目标检测对比实验,结果如表3所示。

表3 本文方法对5幅SAR图像阴影超像素去除前后的检测性能比较Tab.3 Quantitative measures of the proposed method for five SAR images with and without shadow superpixels removal
由于本文方法只针对筛选出的潜在目标超像素进行检测,因此检测虚警率对阴影超像素并不敏感,去除阴影超像素前后的FPR指标基本持平。若不进行阴影超像素去除,部分阴影超像素被筛选成杂波超像素,导致统计分布参数估计不准确,部分舰船像素被漏检,从而导致TPR值降低。因此,阴影超像素去除作为选择杂波超像素之前的处理步骤,对算法性能提升具有必要性。
4.6 舰船检测对超像素分割结果的依赖性分析
DBSCAN超像素生成方法可以较好地克服相干斑噪声的干扰,生成精细的超像素,这些超像素很好地附着在图像边界上,保留舰船目标形状。文中设置的超像素数量决定了对图像进行分割的精细程度,它对舰船检测的结果存在较大影响。一般来说,超像素数量越多,获得的均匀区域也越多,从而更好地保留舰船目标细节,但是也会带来一些缺点。一方面,更多的超像素将导致参数估计和CFAR检测计算量增加。另一方面,目标会存在过分割的情况,在计算过程中会导致一些漏检。为了讨论超像素数量对最终舰船检测的影响,本文选择了第1幅TerraSAR图像,进行了超像素数为3000,4000,5000,6000的超像素分割,然后使用本文方法进行舰船检测并计算相应的FPR和TPR值,结果如表4所示。随着超像素个数从3000增加到5000,FPR降低,TPR逐渐增高,当超像素数量为5000时,可以达到最佳效果。但是,如果将超像素数增加到6000,TPR表现稳定,FPR则出现增高的情况。分析其原因,超像素数量太多则会出现一些过分割错误,由此导致漏检和虚警。
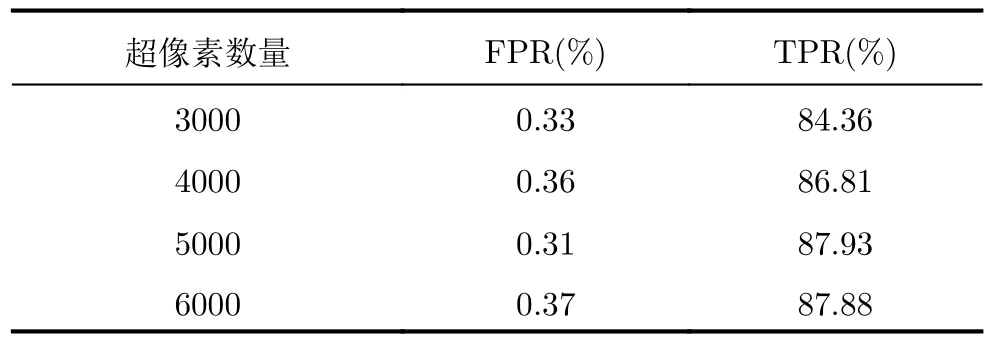
表4 本文方法在不同超像素数量情况下对TerraSAR X波段SAR图像1检测性能比较Tab.4 Quantitative measures of the proposed method for TerraSAR X band SAR image 1 with different superpixel numbers
4.7 时间效率分析
如前文所述,由于超像素的数量明显少于像素数量,所以基于超像素的CFAR检测方法可以加速舰船检测。表5给出了不同方法对5幅SAR图像检测时间的比较。需要说明的是,SP-CFAR,SP-CFAR-TG以及本文方法都采用相同的超像素结果,因此其超像素生成时间都是相同的,这里主要比较CFAR检测算法效率。所有实验均在Windows操作系统,MATLAB软件环境下进行。传统的双参数CFAR检测器比其他方法花费了更长的检测时间,相比之下,SP-CFAR和SP-CFAR-TG方法由于引入了超像素,显著缩短了检测时间。本文方法所设计的潜在目标超像素筛选和同一超像素参数共享策略显著加速了检测过程,因此与其他两个基于超像素的方法相比,本文方法仍然具有较大的时间优势。
本文还讨论了在不同超像素数量下的检测效率,结果如表6所示。由4.6节分析得知,超像素数量的增多将导致更多次数的杂波超像素选取与杂波分布参数估计,所以当超像素数量从3000增加到6000时,检测时间有一个很大的增量,但与其他3种方法相比,本文方法仍具有快速性的优势。

表6 本文方法在不同超像素数量情况下对TerraSAR X波段SAR图像1检测时间比较Tab.6 Time costs of the proposed method for TerraSAR X band SAR image 1 with different superpixel numbers
5 结语
本文提出了一种基于超像素的无窗快速CFAR目标检测算法,用于检测高分辨率SAR图像中的舰船目标。本文方法通过快速DBSCAN超像素生成方法生成超像素,然后定义了超像素相异度,不仅考虑了超像素的邻域信息,还考虑了超像素的非局部信息,即使在多目标的情况下也能准确选取潜在目标超像素的纯净杂波区域,从而获得准确的杂波分布参数,克服了传统CFAR方法中滑窗的弊端。此外,本文提出了一种局部超像素对比度计算方法来优化CFAR检测,以此消除大量城市区域人造目标虚警。与其他基于超像素的CFAR检测器相比,本文提出的检测方法具有更快的检测时间,能够更好地保持舰船目标的形状和细节,且虚警较少。