星载10 m 合成孔径相干成像望远镜和波前估计
2023-03-06吴疆李道京崔岸婧高敬涵周凯
吴疆,李道京,崔岸婧,高敬涵,周凯
(1 中国科学院空天信息创新研究院 微波成像技术国家级重点实验室,北京 100190)
(2 中国科学院大学 电子电气与通信工程学院,北京 100049)
0 引言
星载大口径红外光学望远镜对于天文观测和深空探测具有重要意义。在现有研制能力下,一方面制造大口径望远镜难度较高,另一方面其卫星平台的工程实现也较为困难,迫切需要研究新的解决方案。
目前基于光学合成孔径系统的大口径望远镜主要分为拼接成像和干涉成像两大类。拼接式望远镜本质是通过多个小口径望远镜拼接获得大口径对应的成像分辨率,干涉式望远镜则是通过对两个或多个小口径望远镜信号的干涉处理(互相关)实现与基线长度对应口径的成像分辨率。两者成像分辨率的实现方式虽有一定区别,但其应用效果基本相同,目前都得到发展和应用。
关于拼接成像,其典型代表为天基詹姆斯韦伯太空望远镜(James Webb Space Telescope,JWST)、高轨光学合成孔径监视成像卫星(High Orbit Optical Aperture Synthesis Instrument for Surveillance,HOASIS)[1-2]和凯克望远镜(Keck)。关于干涉成像,国际上现运行的地基甚大望远镜(Very Large Telescope,VLT)和Keck 望远镜都具有长基线干涉成像的功能;美国航天局NASA 设计论证了两套太空干涉测量法任务(Space Interferometer Mission,SIM)和行星探测干涉仪(Terrestrial Planet Finder Interferometer,TPF-I)天基干涉望远镜系统;欧洲航天局ESA 也曾提出了天基达尔文阵列望远镜(Darwin)[1]。近年来我国的大口径天文望远镜技术也得到了快速的发展,文献[3]介绍了“中国哈勃”空间站载2 m 口径天文望远镜,文献[4]对10 m 口径在轨组装空间望远镜的项目启动也进行了公开说明。干涉成像方式又可分为有限数量长基线干涉和综合孔径干涉方式,两种方式都已广泛应用于微波波段射电天文成像,基于激光本振相干探测的长基线干涉已用于地基望远镜恒星角直径测量[5],文献[6]提出了红外光谱干涉成像方法,并且对其在平流层艇上的天文应用前景进行了展望。
传统光学合成孔径望远镜都是通过机械结构等硬件先对接收的信号进行光学合成孔径成像[7],再实施光电探测和AD 采样,对光路微调机构等硬件精度要求较高,而本文望远镜则是通过采用相干探测,先对多个子镜所接收的低分辨率且具有相位信息的复图像信号实施采样,然后再在计算机里相干合成高分辨率图像,使硬件精度要求大幅降低。本文基于波长可调谐激光本振相干探测和衍射薄膜镜,提出了星载10 m 合成孔径相干成像望远镜概念,并根据相位恢复波前估计方法对望远镜阵列进行了形变误差估计仿真,且对其成像性能进行研究与分析。
1 基于相干探测的光学合成孔径成像
1.1 光学合成孔径相干成像原理
制造大口径望远镜难度较高,需考虑通过一系列易于制造的子口径系统组合拼接形成大口径光学系统,由此形成了光学合成孔径成像技术,主要包括迈克尔逊和斐索两种光路结构[1]。本文望远镜是在斐索结构的基础上,借鉴相干激光雷达和射电望远镜探测方式[5,8],在接收系统中引入激光本振,通过空间光路混频实现红外信号和激光本振信号的相加,经光电探测和AD 采样后再实施大口径的合成。
对基于计算成像的光学合成孔径的相关研究,文献[9-10]已经有了一些探索性的工作。针对2 m 衍射口径激光雷达,文献[10]提出了基于相干探测的光学合成孔径方法,通过设置激光本振红外相干探测器,保证多个子镜间所接收窄带红外信号相位的正确传递,光学合成孔径成像在计算机上用软件实现,即计算成像,这种成像方式可定义为光学合成孔径相干成像。
基于波长可调谐的激光本振,将上述思路引入宽谱段红外波段光学合成孔径成像望远镜,可得2 m 口径组镜的光学合成孔径成像系统结构如图1。
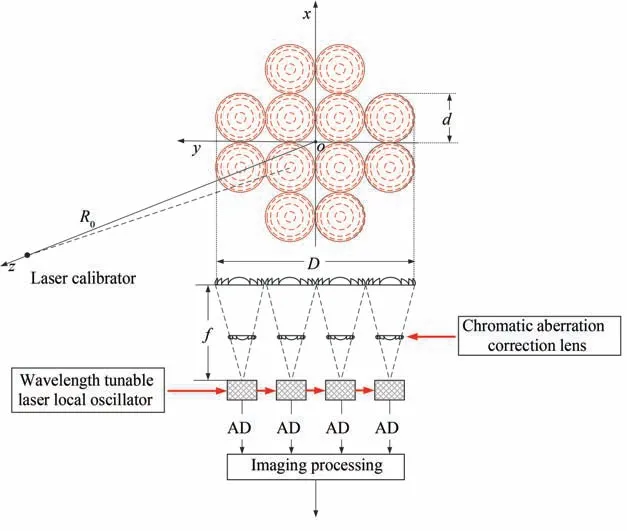
图1 波长可调谐激光本振相干阵列探测器的光学合成孔径成像原理Fig.1 Optical synthetic aperture imaging schematic of wavelength tunable laser local oscillator coherent array detector
图1 中,d为子镜口径,D为等效合成孔径,f为焦距,o点为望远镜阵列平面中心,同时设置激光定标器用于望远镜阵列接收复信号的幅度与相位校正,R0为激光定标器到望远镜阵列平面中心的距离。衍射光学系统的光谱范围较窄,所以当其用于红外波段光学成像时,需要采用色差校正技术[11],通过色差校正镜,对每一个子镜所接收的图像信号进行色差校正。
假定0.5 m 口径薄膜子镜的F数均为5,那么子镜对应的焦距为2.5 m,并且此2 m 口径组镜光学系统可采用相同条纹的衍射子镜,对应的焦距也较小。
在此基础上,基于刚性0.5 m 口径子镜结构光学合成孔径相干成像原理,可利用12 个2 m 口径组镜构建10 m 口径望远镜阵列。该阵列具有轴向尺寸较小、微调机构精度要求较低的特点,并且由此可以大幅减少整个光学系统的体积重量。
1.2 细分红外光谱和光学合成孔径相干成像算法
借鉴参考文献[6,8]中的波长可调谐激光本振探测原理,本文光学合成孔径成像处理在红外中心波长对应的窄带细分光谱图像信号上完成,通过激光本振的波长步进调整,对宽谱段红外信号在电子学频域实现无混叠的选通,等效实现细分红外光谱。在此基础上,对同一中心波长的低分辨率复图像进行相干合成,可以形成高分辨率复图像;对不同中心波长的高分辨率复图像信号进行非相干积累提高信噪比。
对于细分红外光谱,以短波红外为例,设置激光本振的中心波长为1.55 μm 可调谐的激光种子源。假定其可调谐的光谱宽度为0.2 μm,若探测器电子学带宽在4 GHz 量级(对应的瞬时光谱范围是0.032 nm),当波长步进为0.032 nm 时,通过激光本振调谐完成0.2 μm 光谱范围覆盖约需6 250 次,若在每个波长步进间隔用于观测的时间为0.2 ms,总的观测时间为1.25 s。
上述每个波长步进间隔用于观测的时间为0.2 ms,该时间可与传统望远镜的积分时间对应,通过激光本振调谐完成多次采样,主要是为了获取更多的信号能量,提高图像信噪比。若将波长步进方式改为高速扫频方式,假定在0.2 ms 完成0.2 μm 的光谱扫描,即可将总的观测时间缩短为0.2 ms。不同的观测时间对应不同的接收信号能量。
望远镜输入红外光谱范围为0.2 μm 时,假定基于波长步进激光本振光谱细分后等效中心波长为λi,i=1,2,…,M,i为波长步进次数,M为波长步进总数。其光学合成孔径相干成像算法如图2。
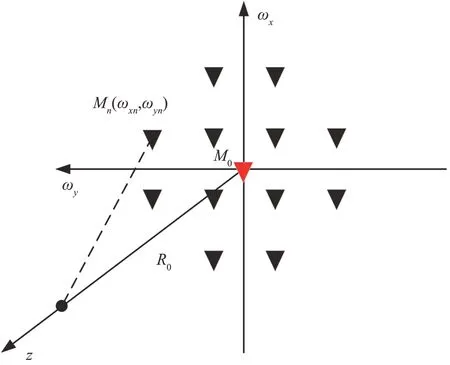
图2 光学合成孔径相干成像算法示意Fig.2 Optical synthetic aperture coherent imaging algorithm schematic
图2 中,M0为望远镜阵列平面中心o点对应的参考图像中心,Mn为各个子镜中心对应的参考图像中心,(ωxn,ωyn)为各个子镜中心在图像域上对于M0的相对距离。
可令fn(x,y)为子镜在光瞳面接收的复信号,定义f0(x,y)为望远镜阵列平面中心o点对应的参考子镜所接收的复信号,其中n=1,2,…,N,N为子镜总数量。则可得经过子镜接收光电探测和AD 采样后的复图像Fn(ωx,ωy),Fn(ωx,ωy)为fn(x,y)的傅里叶变换,(x,y)为光瞳面上点的坐标,(ωx,ωy)为探测成像面上点的坐标。子镜的功能为在中心波长对光瞳信号补偿由子镜口径和焦距决定的相差之后,再实施傅里叶变换形成复图像。
多个子镜的复图像Fn(ωx,ωy)需相对于M0经过平移后才能进行相干合成,得到以M0为中心的光学合成孔径图像,可表示为
式中,ωx1,ωx2,…,ωxN,ωy1,ωy2,…,ωyN为平移系数。
当激光定标器与望远镜阵列平面中心o点的距离R0≫2D2(λi为每个步进等效中心波长),即满足远场条件时,ωxn=ωyn=0;当R0<2D2,即激光定标器相对于望远镜阵列处于近场,若相对于子镜处于远场时,可参照微波雷达阵列天线方向图[12]确定平移系数。
根据望远镜阵列的几何关系,fn(x,y)与f0(x,y)的关系可表示为
其平移系数[12]为
式中,(xn,yn)为望远镜阵列子镜中心在望远镜阵列空间平面上的坐标,(x0,y0)为望远镜阵列平面中心o点在望远镜阵列空间平面上的坐标,由平移系数形成相干合成孔径图像I(ωx,ωy)。
当要进行波前误差估计并进行补偿时,式(2)可改写为
式中,ϕ(x,y)为估计的相位误差。
1.3 激光本振相干阵列探测器形式
传统光学望远镜所使用的探测器仅能获得强度图像,考虑到相干探测体制可获得复图像,且具有高灵敏度和强抗干扰能力,研究相干探测体制在大口径光学望远镜的应用问题具有重要意义。
文献[6]利用光纤耦合器实现激光本振信号与红外信号的相加,并形成新的红外干涉成像光纤结构,其系统结构和干涉型射电望远镜相同。与此同时,引入激光本振信号后,还可以去除宽带红外信号的频谱混叠,并有助于提高红外探测灵敏度[8]。
本文将上述概念转化至空间光路混频,经过色差校正的红外复图像基于分光棱镜与波长可调谐激光本振信号在空间叠加后,进入阵列探测器实现光电转换同时混频,经窄带滤波AD 采样输出复图像,由此形成的空间光路混频红外阵列探测器结构如图3。
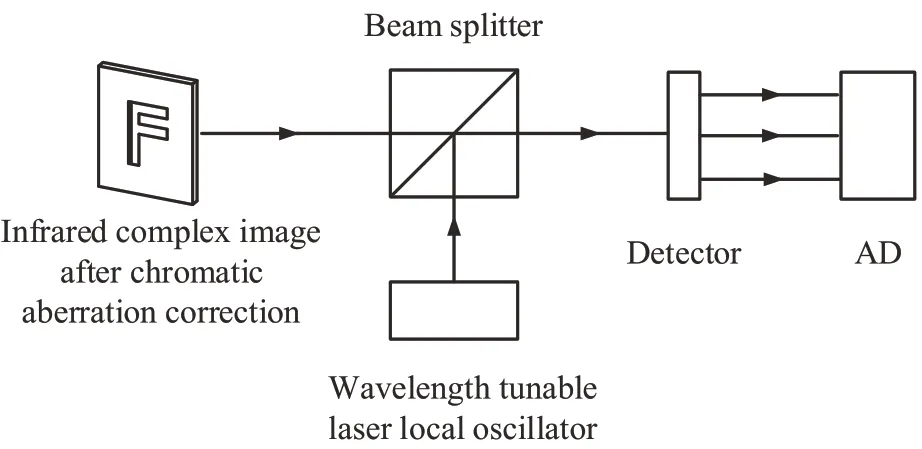
图3 基于空间光路混频的波长可调谐激光本振红外相干阵列探测器结构Fig.3 Structure of wavelength tunable laser local oscillator infrared coherent array detector based on spatial optical path mixing
为使波长可调谐激光种子源形成足够的光谱范围以及覆盖不同的偏振方向,可采用多波段(如3 波段)并联方式,如采用拜耳膜RGB 分光结构同时结合不同方向的偏振探测。为简化系统,空间光路混频可以考虑采用单向圆偏振激光本振信号,原理上,其引入的偏振探测损失仅有3 dB。
使用空间光路混频可与现有的阵列探测器相结合,目前已具有较好的基础,该方式常用于激光全息成像[13-14]。基于激光本振相干探测,文献[15]论述了激光成像中的复图像形成方法,为本文望远镜接收红外复图像提供了借鉴。
1.4 双波段衍射光学系统和宽视场接收
本文望远镜接收波段设计为短波和中波两个红外波段,对应的中心波长为1.55 μm 和 4.65 μm,双波长接收通过3 倍谐衍射技术共用一个0.5 m 口径子镜,分光后经过不同波段的接收通道色差校正后进入探测器,双波段红外衍射光学系统结构如图4。

图4 双波段红外衍射光学系统结构Fig.4 Structure of dual band infrared diffractive optical system
为扩大观测范围,通过压缩光路并设置小口径折反镜来实现接收波束扫描[16]。通过设置折反镜前移可减少整个0.5 m 口径子镜的轴向距离,进而减少望远镜整体体积。
宽谱段宽视场接收会带来孔径渡越问题,为此除划分子孔径处理外,采用参考文献[17]中的信号处理方法也可对孔径渡越进行补偿。此外,在电子学光谱细分后,将信号带宽减小到一定程度时,孔径渡越问题同样可以得到缓解。在此基础上,由于等效中心波长λi已知,有可能形成数字色差校正方法,而无需设置传统色差校正镜。
2 实施方案与指标分析
本文合成孔径望远镜主要是通过不同空间位置的较小口径,组合形成一个大的口径,类似大口径拼接式光学望远镜,以分块式望远镜合成大口径形式实现高分辨率成像探测。
2.1 望远镜主要参数和组成布局
本文望远镜接收波段对应的中心波长分别为1.55 μm 和4.65 μm,每个波段的光谱范围为0.2 μm,子镜形式为衍射薄膜镜,口径为0.5 m,12 个子镜构成2 m 口径组镜,12 个2 m 口径组镜经稀疏构成10 m 口径望远镜,子镜数量总数为144。参考光学合成孔径成像原理,该10 m 大合成孔径望远镜主要结构以及参考布局如图5。图5(a)为该望远镜在卫星上的展开布设示意图,图5(b)为该望远镜12 个组镜具体展开方式示意图,图5(c)为该望远镜在卫星装载时的收拢折叠方式示意图。
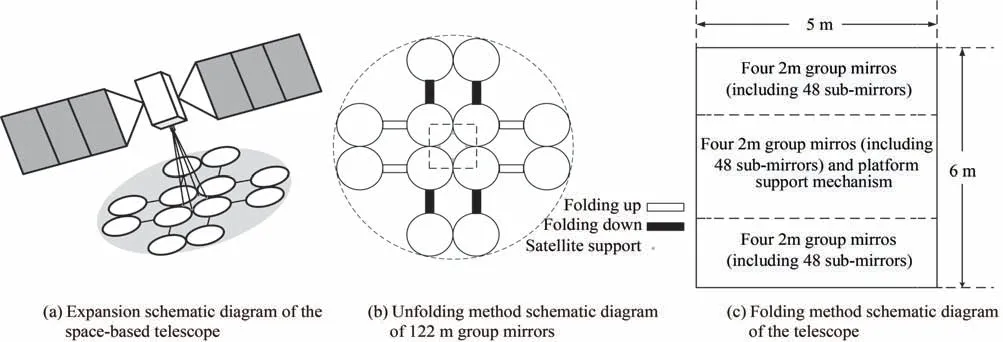
图5 望远镜主要结构Fig.5 Main structure of the telescope
当子镜口径为0.5 m,F数为5,焦距为2.5 m 时,结合折反光路,有可能将2 m 组镜外包络控制在直径2.2 m×厚度2 m,进而将整个望远镜的包络控制在直径5 m 量级,高度6 m 量级。
该望远镜利用144 个子镜进行红外信号接收,其成像处理在AD 采样接收后由计算机完成,是一种典型的计算成像式望远镜。
2.2 望远镜调制传递函数
与传统光学单孔径成像系统相比,合成孔径成像系统光瞳函数的表现形式将不再是单个连通域,而是多个连通域的稀疏组合,由此可得此系统的点扩散函数和调制传递函数。
在远场条件下,点目标在光瞳面所接收的复信号为f(x,y),成像面上的复图像为F(ωx,ωy),令PSF(ωx,ωy)为本文望远镜系统的点扩散函数,MTF(x,y)为调制传递函数,则根据参考文献[18]可得
式中,(x,y)为光瞳面上点的坐标,(ωx,ωy)为探测成像面上点的坐标。
在理想情况下,单孔径10 m 望远镜与合成孔径10 m 望远镜光瞳函数、点扩散函数与调制传递函数的仿真结果如图6~8。假定单孔径10 m 望远镜系统调制传递函数的最大值为1,那么该合成孔径10 m 望远镜系统调制传递函数的相对最大值为0.35,这是因为稀疏拼接会使望远镜的调制传递函数主瓣降低,副瓣升高,该问题可通过后续的图像处理方法解决。

图6 10 m 望远镜系统光瞳函数Fig.6 Pupil function amplitude of 10 m telescope system
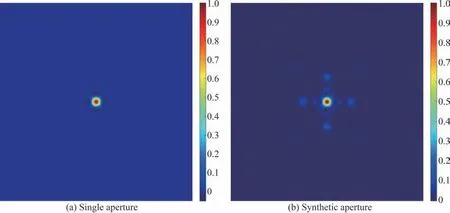
图7 10 m 望远镜系统点扩散函数Fig.7 Point spread function of 10 m telescope system
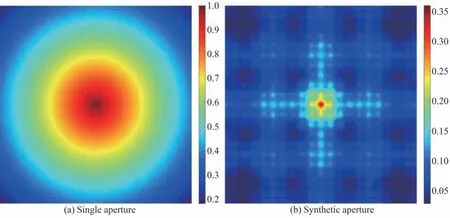
图8 10 m 望远镜系统调制传递函数Fig.8 Modulation transfer function of 10 m telescope system
2.3 观测性能
本文望远镜阵列由144 个子镜组成,每个子镜口径为0.5 m,F数为5,焦距为2.5 m,等效口径为10 m,接收波段分为短波和中波两个红外波段,其观测性能指标如表1。通过光学合成孔径处理,当接收红外中心波长为1.55 μm 时,本文望远镜阵列相对于单子镜像元角分辨率3.2 μrad 提高了16 倍,其像元角分辨率为0.2 μrad,接近10 m 口径望远镜衍射极限角分辨率。
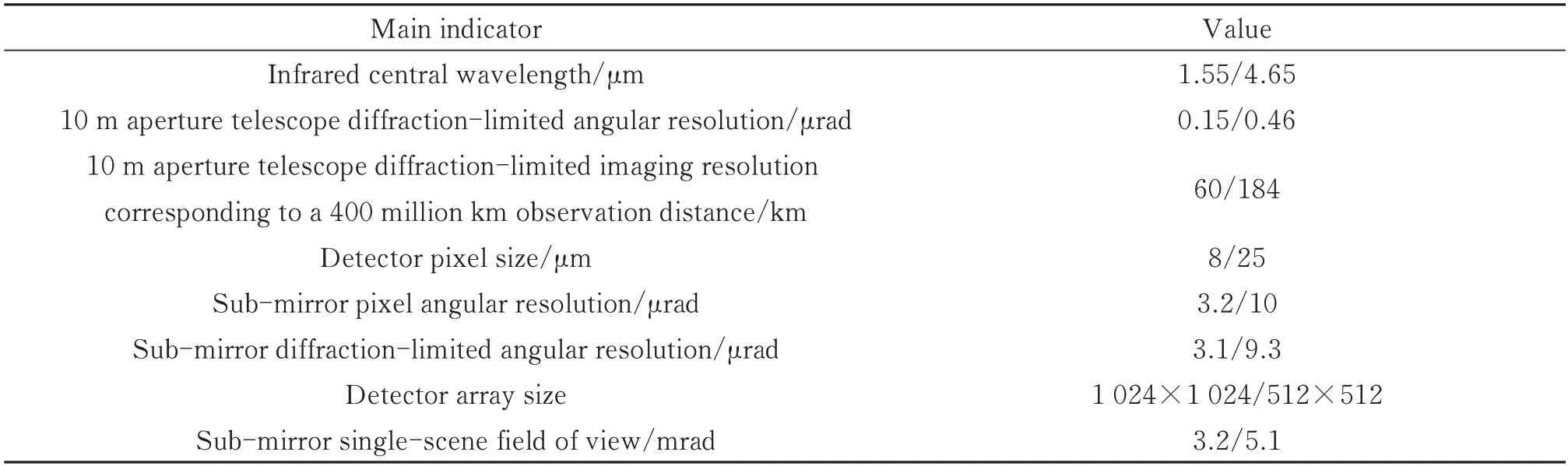
表1 望远镜观测性能指标Table 1 Telescope observation performance indicators
通过扫描可扩大观测幅宽,本文望远镜接收使用0.5 m 口径衍射光学系统,采用压缩光路通过设置小口径折反镜实现扫描,当压缩比为20∶1 时,望远镜物方视场为-1.6°~+1.6°(折反镜转动范围为-16°~+16°)。后续若采用两维激光相控阵实现折反镜功能,可减少机械转动环节,具体方法可参考文献[16]。
以短波红外为例,本文望远镜与传统望远镜探测灵敏度相关指标如表2。由表2 中的接收面积、光谱范围和偏振损失可知,本文望远镜信噪比为传统望远镜信噪比的1/36,但由于采用相干探测体制,在原理上其探测灵敏度比传统的直接探测至少要高100 倍[8],于是其有效的探测灵敏度约为传统望远镜的2.8 倍,观测极限星等优于21 星等。

表2 望远镜探测灵敏度指标Table 2 Telescope detection sensitivity indicators
3 波前估计与成像处理仿真
红外光学信号波长短至微米量级,望远镜微米量级阵列形变误差都会引入较大的相位误差并对成像造成影响,类似自适应光学中的钠导星[19],可以设置激光定标器,借助激光通过波前探测技术[20]实现波前相位估计与补偿。
现有的波前探测方法主要分为两类:一类是直接式波前探测,即对待测波前分布(光瞳面)的直接探测;另一类是间接式波前探测,即对待测波前(光瞳面)在后续光路的某个或某些特征面(焦面上或附近)的光强分布进行逆向求解得波前分布,间接地探测待测波前分布。本文望远镜使用了间接式波前探测方法中的相位恢复法,基于盖师贝格-撒克斯通(Gerchberg-Saxton,GS)算法[21-22]对相位进行估计,针对单色相干波前,由已知像平面和光瞳面上的光强分布来重构波前,以此来获得波前相位。
于是可以根据光学合成孔径相干成像算法对激光定标器进行成像处理仿真,其成像处理流程如图9。图中,n为子镜数量,fn(x,y)为子镜在光瞳面接收的复信号,Fn(ωx,ωy)为子镜经光电探测和AD 采样后的复图像,I(ωx,ωy)为Fn(ωx,ωy)相干合成的复图像,i(x,y)为I(ωx,ωy)对应的复信号,(x,y)为光瞳面上的点坐标,(ωx,ωy)为探测成像面上的点坐标。
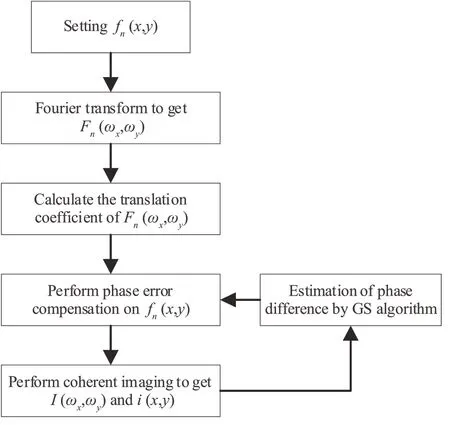
图9 光学合成孔径相干成像仿真流程Fig.9 Flowchart of optical synthetic aperture coherent imaging simulation
采用相干探测体制之后,本文望远镜的波前相位误差估计与补偿在原理上即可采用微波SAR 常用的自聚焦方法如相位梯度自聚焦算法(Phase Gradient Autofocus Algorithm,PGA)[23]实现。为体现光学成像和微波成像在原理上的一致性,其波前相位误差估计与补偿直接采用了传统光学成像中的波前探测和相位恢复方法(GS 算法),但该望远镜则是通过相干探测器接收低分辨率复图像,然后在计算机中相干合成得到高分辨率复图像,再取其幅值通过GS 算法来进行相位估计。
仿真采用激光定标器完成望远镜阵列形变误差波前估计,以短波中心波长1.55 μm 为例,子镜口径为0.5 m,探测器阵列规模为1 024×1 024,对144 个0.5 m 组成10 m 口径望远镜进行光学合成孔径相干成像仿真。
3.1 光学合成孔径相干成像处理
0.5 m 口径子镜远场条件为320 km,10 m 口径望远镜阵列远场条件为129 000 km,这意味着系统校正所需的激光定标器可以设置在距离望远镜阵列320 km 处,便于空间布设和控制。
仿真中,假定激光定标器距离为36 000 km,在望远镜阵列没有形变误差时,相对于0.5 m 子镜为远场,相对于望远镜阵列为近场。对点目标(激光定标器)进行光学合成孔径相干成像的仿真结果如图10,望远镜阵列角分辨率为0.5 m 子镜角分辨率的16 倍。
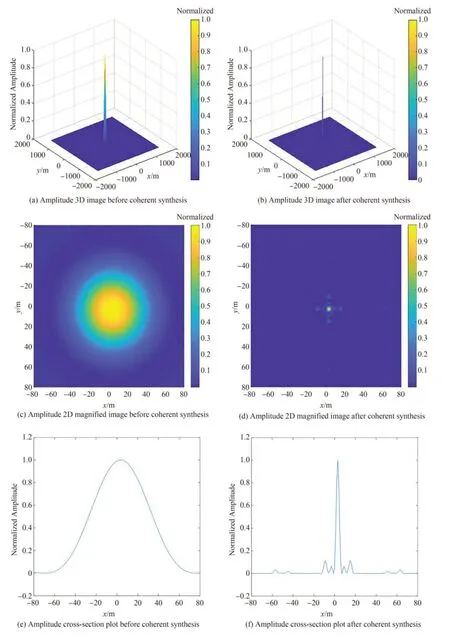
图10 相干合成前后点目标复图像幅度图仿真结果Fig.10 Simulation results of point target's complex image amplitude maps before and after coherent synthesis
3.2 波前相位误差估计与数字补偿成像
设定激光定标器距离为36 000 km,添加x轴振幅为7.75 μm(5 个短波红外中心波长),跨度为10 m 的机械结构正弦误差,仿真结果如图11。因各个子镜中心在光瞳面上的空间位置不同,子镜间光瞳所接收的复信号除所添加的正弦误差外,还具有线性和非线性相位差。经光学合成孔径相干成像处理后,子镜信号因空间位置不同所拥有的线性和非线性相位差已被消除,只剩下x轴方向的正弦相位差,如图11(a)、(b)。
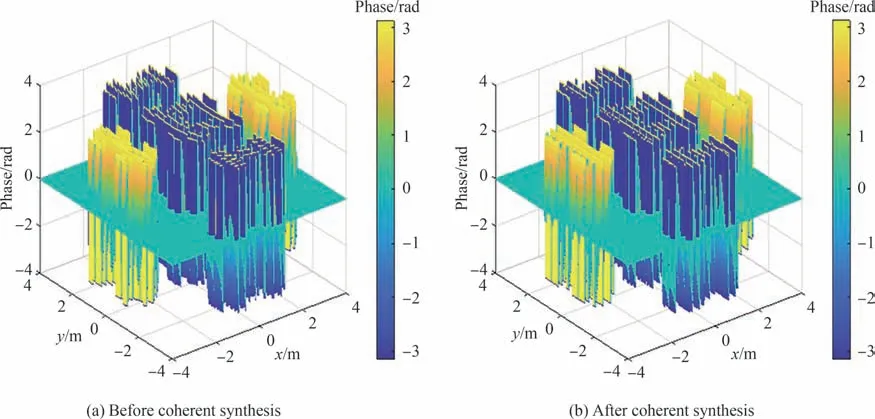
图11 相干合成前后光瞳面上接收复信号设计相位仿真结果Fig.11 Simulation results of the received complex signal's design phase on the pupil plane before and after coherent synthesis
通过144 个子镜、144 个探测器接收144 副复图像再相干合成,对相干合成后的复图像幅度与对应的复信号幅度进行基于GS 算法的相位估计,仿真恢复结果如图12。图12(a)为设计的正弦误差与恢复的正弦误差三维图,图12(b)为进行了相位解缠的图12(a)的二维切片图,从图12(c)可知设计误差相位与恢复相位之差的变化幅度不超过0.25 μrad,说明基于相位恢复对波前相位误差进行估计与补偿是可行的。


图12 相干合成后光瞳面上接收复信号相位估计仿真结果Fig.12 Phase estimation simulation of complex image signals after coherent synthesis
对具有正弦阵列形变误差且相干合成后的复图像进行基于GS 算法的相位恢复,再将生成的相位估计补偿至相干合成前的低分辨率复图像上,然后进行相干合成,可得经相位补偿后无正弦误差相干合成后点目标复图像,仿真结果如图13。通过设置激光定标器,经由相干探测器接收低分辨率复图像,然后再在计算机里相干合成高分辨率图像是可行的。并且对于望远镜展开机构,其阵列形变误差可通过相位恢复技术估计相位并在计算机中进行补偿,其微调机构机械控制精度可从二十分之一波长量级降低为五个波长量级,增加了工程实现的可行性。
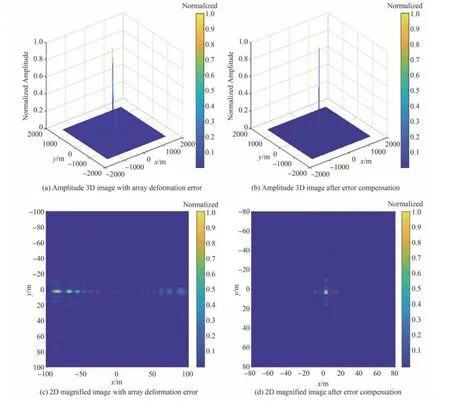
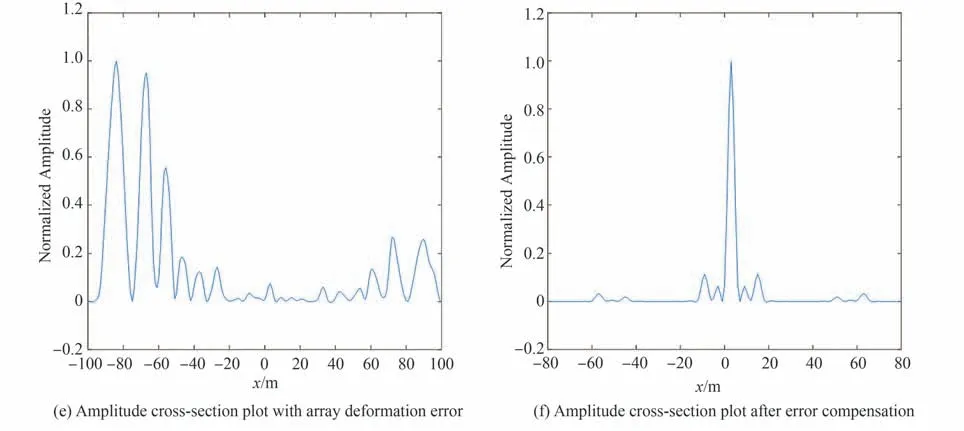
图13 相干合成后阵列形变误差补偿前后点目标复图像幅度图仿真结果Fig.13 Simulation results of point target’s complex image amplitude maps before and after array deformation error compensation after coherent synthesis
4 结论
本文研究了基于相干探测器的天基10 m 光学合成孔径望远镜系统结构,并对其进行了波前误差估计与成像仿真。结果表明,相对于传统的大口径光学望远镜,该望远镜成像处理在计算机中完成,系统尺寸和重量大幅减少,并具有良好的探测性能。采用间接式波前探测方法的相位恢复技术时,可降低对微调机构等硬件的精度要求,其机械控制精度可从二十分之一波长量级降低为波长量级,技术实现具有可行性。