基于猫眼逆反射器的大范围免调试激光器*
2023-03-05盛泉耿婧旎王爱华王盟齐岳刘俊杰付士杰史伟姚建铨
盛泉 耿婧旎 王爱华 王盟 齐岳 刘俊杰 付士杰† 史伟‡ 姚建铨
1) (天津大学精密仪器与光电子工程学院,天津 300072)
2) (天津大学光电信息技术教育部重点实验室,天津 300072)
3) (天津索维电子技术有限公司,天津 300308)
利用具有逆反射特性的光学元件构成激光器的谐振腔,能够赋予激光器大范围免调试工作的潜力.本文讨论了谐振激光自适应无线传能/通信等新兴应用对激光器免调试工作范围的要求,设计了基于猫眼逆反射器的大范围免调试激光器,采用腔内望远镜系统和复合腔结构分别拓展激光器的工作距离范围和提升激光安全性.通过对激光谐振腔的稳定性分析和对猫眼逆反射器的像差分析,明确了球差和场曲导致的猫眼离焦分别是限制免调试激光器工作距离和视场的关键因素.实验中通过优化光学设计补偿像差,实现了端面泵浦Nd:GdVO4 激光器的大范围免调试运转.16.6 W 泵浦功率下,激光器接收端在1—5 m 工作距离范围内移动和在±30°接收端视场范围内转动时输出功率保持在5 W 以上,功率波动小于10%,无需重新准直调节.5 m工作距离下,在4.6°发射端视场内输出功率保持在其最大值的50%以上,对应接收端横向移动范围达到40 cm.本工作明确了猫眼腔免调试激光器的设计优化原则,为相关研究提供了实验结果参考.
1 引言
激光是最具代表性的定向能载体,基于激光实现高效、高速的无线能量和信息传输是研究人员长久以来的追求[1,2].近年来出现了基于免调试激光器的谐振激光自适应无线传能/通信技术: 与图1(a)所示的常规激光无线传能/通信技术中通过跟瞄系统将光束投射到接收端不同,该方法中将激光谐振腔的输出镜与能量/信息接收端的光电池/探测器布置在一起,使得在谐振腔内振荡、经输出镜输出的激光自动投射到接收端,不再需要复杂昂贵的跟瞄系统,如图1(b)所示.另一方面,由于激光发射端和接收端之间的传输光路位于激光谐振腔之内,侵入传输光路的物体会阻断激光振荡而不再受到激光辐照,因此该技术具有天然的安全性[2,3].理论上,利用角锥、球透镜或猫眼(cat-eye retroreflector,CER)等具有逆反射特性的光学元件构成激光谐振腔后,激光器就具有免调试工作的能力,即激光器在其发射端和接收端之间的距离和相对朝向在一定范围内变化时能保持高效工作,从而使自适应的谐振激光无线传能/通信成为可能.

图1 基于跟瞄的激光无线传能(a)和谐振激光自适应无线传能(b)示意图Fig.1.Schematic of the (a) conventional laser power transfer based on acquisition,tracking,and pointing (ATP) system and (b)adaptive resonant beam wireless laser power transfer/communication.
该技术由以色列的Wi-Charge 公司带入大众视野后即受到广泛的关注[3,4],其后Liu 等[2,5]对该方法的应用前景进行了讨论和展望.大动态范围的免调试激光器是实现谐振激光自适应无线传能/通信的关键,此处动态范围包括工作距离、发射端视场和接收端视场3 个方面,如图2 所示: 工作距离即包含全反镜和增益介质的激光发射端与激光接收端(输出端)之间的距离d;接收端视场(field of view,FoV)α指接收端自身的俯仰偏摆方向变化,其光轴未对准发射端时,接收端光轴与振荡光路夹角的容限;发射端视场β则代表了接收端相对发射端光轴偏离的容限.激光器只有发射端和接收端互相在对方的视场内,且间距在有效工作距离范围内时才能正常工作.
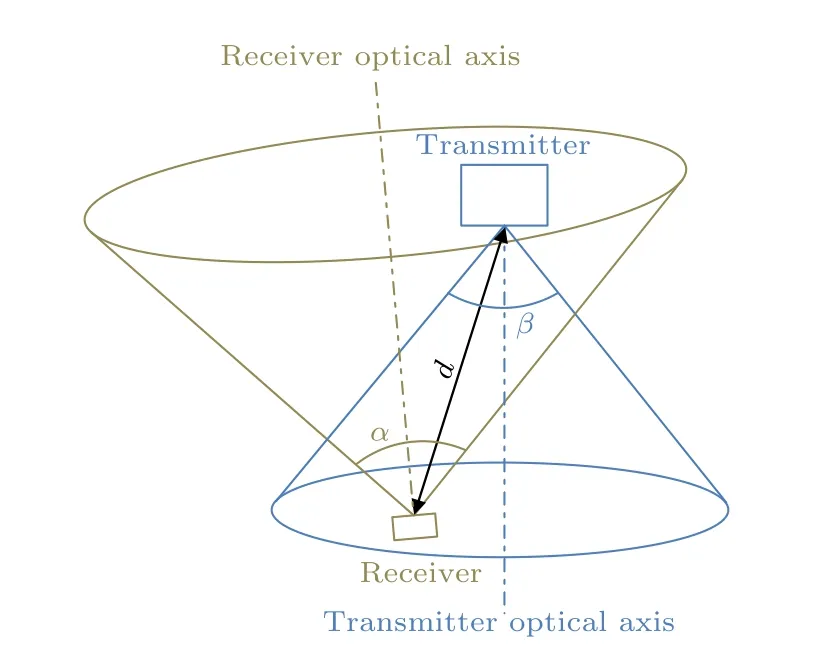
图2 免调试激光器的工作距离、接收端视场和发射端视场Fig.2.Working distance,receiver FoV and transmitter FoV of the alignment-free laser.
在大范围免调试激光器的具体实现方面,Lim等[6]在2019 年报道了基于半导体光放大器(semiconductor optical amplifier,SOA)增益和角锥逆反射器的免调试激光器,在1 m 的工作距离下获得了毫瓦量级的激光输出,并利用SOA 的宽带增益特性和光栅色散实现了约40 mm 的接收端横向位移范围(约2.3°发射端视场).2021 年,上海光机所的Wang 等[7]报道了基于薄片Nd:YVO4增益介质和猫眼逆反射器的免调试激光器,在150 mm的工作距离下实现了±13°的接收端视场,接收端横向位移范围为约±20 mm,最大输出功率超过10 W.2022 年,长春光机所的Zhang 等[8]报道了面向传能应用的光泵浦外腔VECSEL 激光器,工作距离2 m 时,15 W 泵浦功率下激光输出功率86.3 mW,接收端横向位移容限小于10 mm.同年,Javed 等[9]报道了基于光纤增益和球透镜逆反射器的免调试激光器,能够在长达30 m 的工作距离下提供400 mW 的激光输出功率,球透镜理论上具有不受限制的接收端视场,但该方案中的光纤耦合结构在很大程度上限制了发射端视场,即使进一步通过光栅等元件引入色散也只能允许一个方向上的接收端离轴,无法实现二维的发射端视场.Liu 等[5]采用类似图1(b)光路结构开展了实验工作,泵浦功率为37.3 W 时,在2.6 m 工作距离内能够产生约5 W 的激光输出,激光功率降至接近0 时的接收端离轴量为±18 cm(发射端视场±5.1°),接收端视场未进行说明.除高校和科研院所之外,华为公司等[10]工业界的代表也有开展相关研究工作的报道.
为实现激光器的大范围免调试工作,本文选择以猫眼逆反射器构成激光器的谐振腔.经过分析,认为球差和场曲等像差导致的猫眼离焦是限制激光器工作距离和视场动态范围的主要因素.通过优化激光谐振腔设计和补偿像差,实验实现了激光器的大范围免调试工作: 在不对谐振腔进行任何重新准直调节的情况下,端面泵浦的1063 nm Nd:GdVO4激光器泵浦功率16.6 W 时,1—5 m 工作距离和±30°接收端视场内激光输出功率保持在5 W 以上且波动小于10%,5 m 工作距离下4.6°发射端视场内激光输出功率大于其最大值的50%.此外,采用复合腔结构降低发射端与接收端之间传输光路上的激光功率密度,优化了激光安全性.本文对相关实验结果以及猫眼腔免调试激光器的设计优化原则进行总结和讨论.
2 激光器的谐振腔设计
图3 给出了大范围免调试激光器的光路示意图.光纤耦合输出的泵浦光经过透镜L0 和L1 准直和聚焦后入射激光晶体,实验中所用晶体为原子掺杂浓度0.5%的a切割Nd:GdVO4晶体,尺寸为4 mm×4 mm×8 mm;激光波长1063 nm,泵浦波长为808 nm,激光晶体处泵浦光斑半径约500 µm.平面激光全反镜M1 与透镜L1 构成发射端猫眼,激光输出镜M3 与透镜L4 构成接收端猫眼.考虑激光器工作距离的要求以及高斯光束固有的发散特性,腔内插入两片透镜L2 和L3,二者间距等于其焦距之和,构成望远镜系统,起到对光束扩束准直、压缩发散角的作用.腔内各透镜均镀有1063 nm激光增透膜.从L0 到L3 的器件构成激光发射端,L4 与M3 构成的猫眼为激光接收端.此外,腔内还在透镜L2 与L3 相重叠的焦点处插入一片平面部分反射镜M2,形成复合腔结构,起到降低传输光路上的激光功率密度、提高激光安全性的作用[4,11,12].实验中M2 和M3 对1063 nm 激光的反射率均为40%,对应整个复合腔的等效耦合输出透过率为约18%,Nd:GdVO4晶体的受激发射截面相对常用的Nd:YVO4晶体较小,能够保证所用的最大泵浦功率16.6 W 下内腔部分不会单独起振.各器件之间的距离分别用符号d1—d7表示.

图3 免调试激光器光路示意图 (a)接收端位于发射端光轴上且朝向发射端;(b)接收端相对发射端光轴存在偏离,且朝向与振荡光路存在夹角Fig.3.Schematic of the alignment-free laser: (a) The receiver and the transmitter are on the optical axes of each other;(b) the receiving end deviates from the optical axis of the transmitting end,and the orientation has an angle with the oscillating optical path.
对于复合腔的参数设计,首先激光谐振腔整体M1—M3 应是稳定腔,才能形成激光振荡.考虑M1-M2 内腔部分与M2-M3 外腔部分之间模式耦合的要求,应使内腔部分M1-M2 为临界腔,允许以任意高度平行于光轴入射的光在其中振荡;同时外腔部分M2-M3 为稳腔,则激光器的模式和谐振腔稳定性完全由外腔部分所决定.M2 位于L2 和L3 重叠的焦点处,与二者分别构成两个猫眼.只有经过猫眼光瞳入射的光束才能得到较为理想的逆反射效果,损耗最小;因此当接收端相对发射端光轴存在一定偏移量Δ时,激光在发射端与接收端之间以图3(b)所示的光路振荡,振荡光路与发射端光轴之间的夹角θ1由二者的光瞳位置决定,所允许的θ1的最大值即为发射端视场α.接收端自身的朝向也可能导致其光轴与振荡光路存在一定夹角θ2,所允许的θ2的最大值即为接收端视场β.理想情况下,发射端和接收端的视场由器件的孔径决定,而实际上由于谐振腔稳定性的要求,光学元件的像差成为更重要的限制因素.
利用ABCD 矩阵计算谐振腔的稳区,对于自适应激光无线传能的应用场景,一方面工作距离d6是一个大范围变化的变量,另一方面考虑长工作距离对于激光准直性的要求,透镜L3 与M2 镜的间距d5应正好等于L3 的焦距,发射端的其他参数也应是固化的,因此需要着重考虑的是接收端猫眼间距d7和工作距离d6对谐振腔稳定性的影响.图4 给出工作距离d6在1—5 m 范围内变化时d7的稳区,计算中各透镜和激光晶体的热透镜均近似为薄透镜处理,理论计算Nd:GdVO4晶体在实验中所用的最大泵浦功率16.6 W 下热透镜焦距ft为500 mm[13],相关参数如表1 所示.其中透镜L1 与L2 选用一致的参数以简化系统设计,为优化工作距离,L3 的焦距约为L2 焦距的2 倍,将L2 左侧半径约500 µm 的光束扩束到半径约1 mm,与未加入腔内望远镜系统对光束扩束准直的情况相比,5 m 工作距离处的接收端光斑半径从约3.4 mm 压缩至约2 mm.从图4 中可以看出,随着工作距离d6的增大,接收端猫眼间距d7的稳区发生严重的窄化.当透镜L4 的焦距f4=50 mm时,d7的稳区范围从d6=1 m 时的50—52.94 mm收窄到d6=5 m 时的50—50.52 mm.如使用更短焦距的透镜L4,则d7的稳区也更窄: 例如f4=25 mm,d6=5 m 时d7稳区范围为25—25.13 mm,其宽度仅是f4=50 mm 时相同工作距离下的四分之一.因此可以预见,当激光器的工作距离较长时,d7相对其优化值的微小偏离即会严重影响激光器的输出功率,甚至导致激光不能起振.从另一个角度解释,只有合焦的猫眼才能让逆射光与入射光的发散角一致;如果二者的发散角度不一致,相当于光束经猫眼逆射后其中的部分能量不在原来的模式中,即模式不能完全自再现,遭受了一定损耗.激光器的工作距离越长,发散角变化造成的逆射光与入射光之间的偏差也就越大,因此猫眼离焦的容限也就越小,对应d7的稳区范围越窄.

图4 不同工作距离d6 下接收端猫眼间距d7 的稳区Fig.4.Stability zones of receiver CER distance d7 as a function of working distance d6.

表1 计算和实验中所用参数Table 1.Parameters used in the experiment and calculation.
3 像差的影响
理想情况下,激光器的免调试范围仅受到光学元件孔径的限制.光束经过较长的工作距离到达接收端时会发散成较大的尺寸,因此要求接收端透镜有足够的孔径;同时,各猫眼透镜和反射镜的孔径决定了视场的理论上限.但在实际工作中,球差和场曲等像差会对激光器的免调试范围产生严重的限制.
球差是球面光学元件固有的一种像差,在球差的作用下不同入射高度的光线的实际焦点相对近轴像点发生不同程度的偏离,如图5(a)所示.而猫眼只能对合焦的光线实现良好的逆射作用,因此在球差的作用下腔内振荡的光束中必然有部分能量离焦,不能得到逆射和形成自再现,影响腔模和产生损耗[11,14-16].在工作距离5 m 时接收端的基模光斑半径会达到2 mm[11],光束口径越大,相应球差越严重.图5(b)给出理论计算的焦距f=25 mm 的K9 平凸透镜的球差,也即不同半径的光束边缘的实际焦点位置相对透镜理论焦点的偏移量.可以看出,当光束半径2 mm 时,球差导致的离焦达到0.70 mm,已明显大于5 m 工作距离下接收端猫眼间距d7=0.13 mm 的稳区宽度.根据谐振腔稳区的定义,不满足稳定性条件时光线在腔内经过有限次往返后会逸出谐振腔,形成损耗.因此,要拓展激光器的工作距离,需要对球差进行有效的控制.
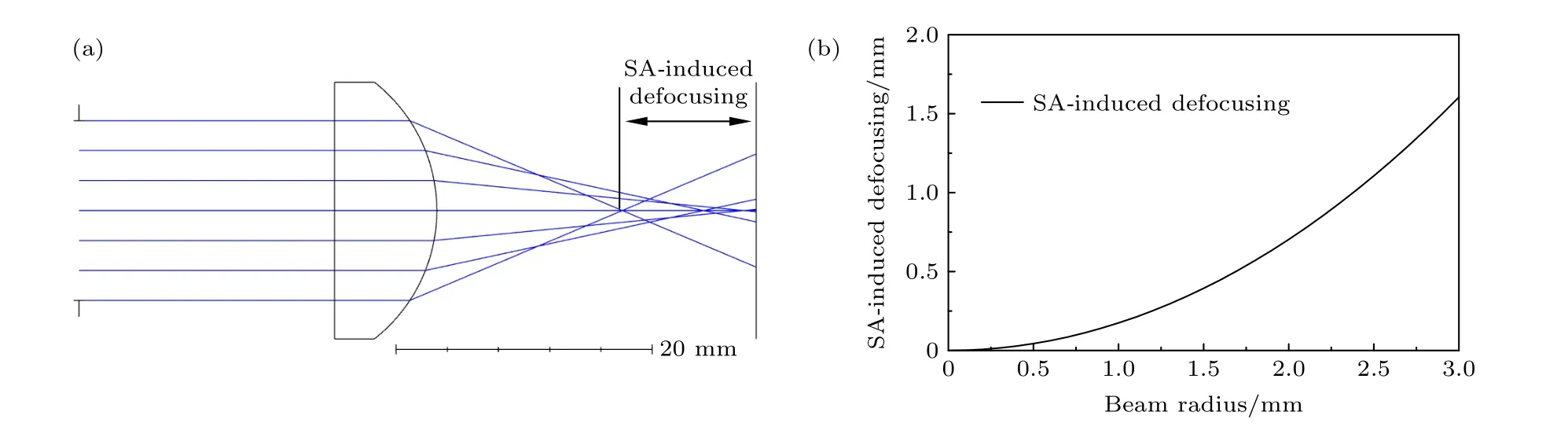
图5 使用f=25 mm 的K9 平凸球面透镜时球差导致的猫眼逆反射器离焦Fig.5.CER defocusing induced by the spherical aberration of a K9 plano-convex spherical lens with f=25 mm.
如图3(b)所示,当发射端和接收端的光瞳所决定的振荡激光光路与发射端和接收端的光轴存在夹角时,光束以一定角度入射猫眼逆反射器;不同角度入射光束的实际焦面既不是平面,也不是曲率半径(radius of curvature,RoC)等于透镜焦距的曲面,即存在场曲,如图6(a)所示.场曲也不可避免地导致猫眼的离焦[12,17],图6(b)给出反射镜为平面镜的常规“远心猫眼”中场曲导致的光束实际焦点相对位于透镜理论焦点处的反射镜面的偏离量.当所用透镜为f=25 mm 的K9 平凸透镜时,在入射角度仅为1.8°时场曲导致的猫眼离焦量就达到0.13 mm,如图6(b)所示,与5 m 工作距离下d7的稳区宽度相等,且离焦量随入射角度的增大趋势变快.因此,尽管理想情况下25.4 mm 的透镜孔径决定的猫眼视场超过±26°,但实际工作中场曲导致的猫眼离焦会严重限制激光器的视场,在长工作距离导致稳区范围很窄时尤为明显.为实现激光器的大范围免调试运转,也要考虑场曲的补偿.
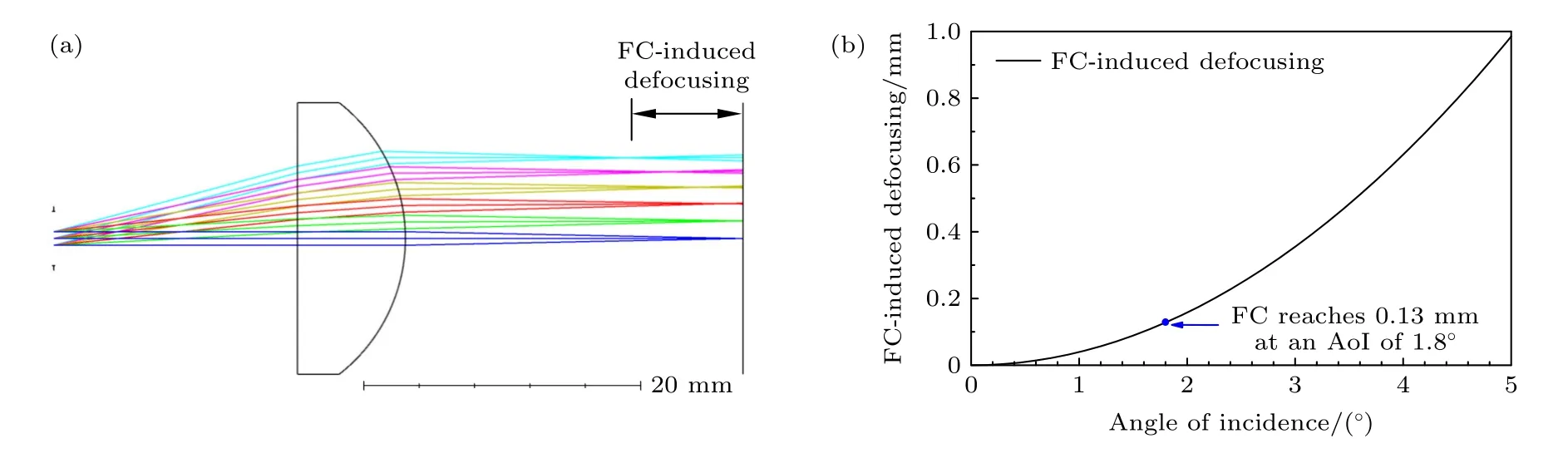
图6 使用f=25 mm 的K9 平凸透镜时场曲导致的猫眼逆反射器离焦Fig.6.CER defocusing induced by the field curvature of a K9 plano-convex lens with f=25 mm.
4 实验结果和讨论
按照图3 的光路结构开展实验研究,入射激光晶体Nd:GdVO4的808 nm 泵浦光功率为16.6 W.首先令发射端与接收端互相在对方的光轴上,研究激光器的工作距离特性.随着激光器工作距离d6的增大,接收端的光斑尺寸增大,球差的影响逐渐增强,同时谐振腔的稳区变窄,导致激光输出功率逐渐降低.接收端球面透镜焦距f4=25 mm 时,在发射端的球差得到补偿的情况下[18],随着工作距离d6从1 m 拉长到5 m,激光输出功率从5.95 W下降至1.16 W,如图7 中蓝色菱形曲线.当f4=51.8 mm 时,由于球差得到一定缓解,同时d7的稳区范围相对较宽,激光输出功率随工作距离d6的下降趋势变缓(黑色方块),1 m 和5 m 工作距离下输出功率分别为6.28 W 和4.54 W,验证了球差导致的猫眼离焦是限制激光器工作距离的主要因素.在此基础上,选用f=25 mm 的消球差非球面透镜作为接收端透镜L4,激光器的工作距离特性得到进一步提升(红色圆圈),1 m 和5 m 工作距离下输出功率分别为6.45 W 和5.84 W.需要说明的是,上述输出功率是在不同工作距离d6下分别优化接收端猫眼间距d7得到的最大输出功率.在工作距离增大的过程中,为获得最大输出功率需要将d7略微减小,d6从1 m 增大到5 m 的过程中,d7的变化量与其在d6=5 m 时的稳区范围相近.考虑实际应用中整个接收端应是一个固化的整体,使用非球面透镜L4 在d6=5 m 时优化并固定接收端猫眼间距d7后,工作距离d6在1—5 m 范围内变化时激光输出功率能够始终保持在5.75 W 以上(灰色圆点),且波动小于10%,实现了激光器工作距离方面的大范围免调试工作.
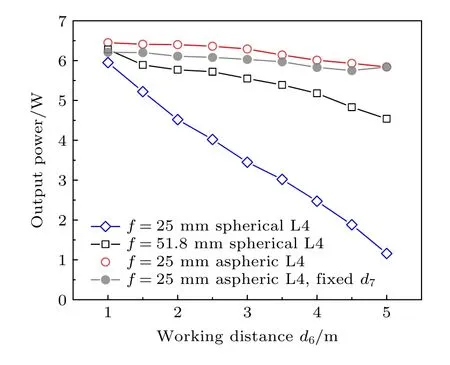
图7 不同接收端透镜球差条件下激光器的工作距离特性实验结果Fig.7.The experimental working distance behavior of the laser using receiver lenses with different SA.
在接收端视场方面,当激光器工作距离较短,在几十厘米时,采用常规猫眼设计就能够实现仅受器件孔径所限的较大接收端视场,与Wang 等[7]的报道类似.但是,随着工作距离的增大,接收端猫眼间距d7的稳区变窄,场曲导致的猫眼离焦对接收端视场的限制越发严重.如图8 所示,工作距离5 m 时输出镜RoC=f4=51.8 mm 的猫眼接收端视场(以输出功率降至其最大值一半计)小于±3°(红色圆点),而输出镜为平面镜的“远心猫眼”视场更小(黑色方块),不到±2°,这也和后者的场曲离焦相对前者更严重的理论计算结果相符,验证了场曲导致的猫眼离焦是限制视场的主要因素.在此基础上,分别设计了平场非球面透镜、反射镜曲率半径与透镜像面相适配(蓝色菱形)以及多镜片改进猫眼(绿色五星)等结构来补偿场曲导致的猫眼离焦[12,19],在5 m 的长工作距离下实验实现了最大±30°的接收端视场,此范围内16.6 W 泵浦功率下的激光输出功率始终保持在5 W 以上,无需对谐振腔进行任何重新准直调整.得益于泵浦光与振荡光较好的模体积匹配以及对像差的有效控制,接收端移动和转动过程中激光输出保持了较好的光束质量,M2在1.3—1.7 之间,接收端运动的动态过程中输出功率也未出现明显的波动.在发射端视场方面,设计加工了补偿场曲的非球面透镜,也使发射端视场得到大幅提升: 以输出功率降至其最大值的一半计,5 m 工作距离下的接收端横向位移允许范围达到40 cm,对应发射端视场4.6°,是补偿场曲之前1.8°视场的约3 倍,但仍与设计水平存在一定差距,离轴量逐渐增大的过程中光束质量也发生了明显的劣化[18].可推测这与激光晶体热透镜的像差有关,后续考虑测量热透镜的像差并据此设计非球面透镜进行补偿,以进一步优化发射端视场.此外,晶体中振荡激光光路的离轴导致其与泵浦光的交叠效率下降,也会在一定程度上限制发射端视场;采用更大的泵浦光斑以及长度更短的激光晶体有助于缓解这一问题,例如文献[5,7]中基于薄片激光晶体实现了较好的发射端视场.
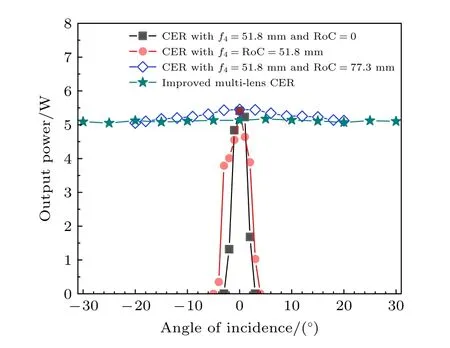
图8 不同接收端透镜场曲条件下的接收端视场特性实验结果Fig.8.The experimental receiver FoVs with and without FC of the receiver CER compensated.
表2 归纳大范围免调试激光器的典型实验结果.通过分析谐振腔结构特点和光学像差,确定了像差导致猫眼离焦和长工作距离下谐振腔稳区窄化是限制激光器免调试工作范围的主要因素,通过优化光学设计补偿像差,实验实现了激光器的大范围免调试高效率运转,为安全、便捷的谐振激光自适应无线传能/通信应用提供光源支持.在1.06 µm附近波段,低成本的硅光伏电池转换效率为约20%,InGaAs 光伏电池的效率能够超过40%[20],相应可产生1—2 W 的电输出功率,能够支持大部分低功率物联网设备的供电需求.如采用具有更高功率处理能力的薄片晶体或半导体激光增益介质,激光器的输出功率水平能够进一步提高,支持更多实际应用.

表2 面向谐振激光自适应无线传能/通信应用的免调试激光器典型实验结果Table 2.Typical experimental results of alignment-free lasers for adaptive resonant beam charging/communication applications.
5 结论
针对自适应激光无线传能/通信等领域对于大范围免调试激光器的需要,本文讨论了激光器免调试工作动态范围的优化要求,设计实现了基于猫眼逆反射器的大范围免调试激光器.通过引入望远镜系统和复合腔结构分别压缩传输光路上的激光发散角和提升激光安全性.基于腔模理论分析谐振腔的稳区,发现长工作距离下,谐振腔稳区的窄化和像差导致的猫眼离焦是限制激光器免调试动态范围的主要因素.通过优化光学设计补偿像差,端面泵浦的Nd:GdVO4激光器泵浦功率16.6 W 时能够在1—5 m 工作距离、±30°接收端视场范围内保持5 W 以上的激光输出功率,5 m 工作距离时的半功率发射端视场4.6°,对应接收端横向位移范围达到40 cm.本工作明确了猫眼腔免调试激光器的设计要求和关键优化方法,实验实现了激光器大范围免调试运转,为实际应用需求和免调试激光器的发展提供了理论和实验结果支持.