基于虚拟现实的复杂场景非显著目标跟踪方法研究
2023-03-02单盛
单盛
基于虚拟现实的复杂场景非显著目标跟踪方法研究
单盛
(安徽电子信息职业技术学院 软件工程学院,安徽 蚌埠 233000)
为避免复杂场景中的干扰因素影响非显著目标跟踪准确度,提出基于虚拟现实的复杂场景非显著目标跟踪方法。通过中值滤波设置图像窗口大小,统计相邻像素点最大中值,定义复杂场景特征区间。基于虚拟现实技术转换跟踪平面三维信息,利用正交原理计算空间位置,对应区间目标坐标。设定模糊逻辑集合,采用最大隶属度量方法构建隶属度函数,在复杂场景内跟踪非显著目标,完成非显著目标跟踪。设定多组目标跟踪场景,分别在影响因素较少、光感条件变化强烈、快速运动过程中和遮挡干扰背景五组条件下,测试非显著目标跟踪效果。实验结果表明,所提方法在上述设定中均可以完成准确跟踪,定位得到目标物。
虚拟现实;复杂场景;非显著目标;目标跟踪
在目标跟踪过程中,极易出现目标被遮挡等情况,并在较为复杂的环境中,很难实现准确获取定位目标。对于国内外的目标跟踪技术研究,美国和英国成立了专门的监控部门,对全国范围内的人体和事物进行跟踪,不仅能够精准地识别人体及部分人体部位,还能够定位到具体位置以及追踪其历史位置[1]。
目标跟踪作为监控领域内的一项基本技术,能够准确地定位运动对象,并通过多种运算方法,获取目标点与监测点的距离,完成有效监控。随着计算机的发展,国内从收录发达国家的优秀跟踪方法,到自主研发新的目标跟踪方法,目前在具体目标追踪和定位上,已经具备了较成熟的处理算法,包括概率统计和分类器算法以及视觉处理算法等。不论是哪一种算法,都可以对实时跟踪场景内的目标,从局部板块中匹配到所需信息,并具体描述其行动轨迹[2]。但随着目标场景的不断变化以及目标特征的复杂化,在相似背景条件下和光照影响下,难以呈现出精准的位置预测结果。
虚拟现实技术能在虚拟世界中,交互现实世界中的事物,并通过计算机对物体的位置和角度特征实现技术增强[3]。该技术逐一叠加虚拟场景和显示场景,在虚拟和现实的融合中,利用虚拟技术生成真实物体的虚拟图像,分析和处理虚拟图像,还原现实世界中目标的具体位置。本文以虚拟现实技术为前提,提出复杂场景下非显著目标的跟踪方法,为准确定位目标提供理论参考。
1 中值滤波定义复杂场景特征区间
滤波器能够排序图像窗口的像素,在滤波器选择过后,图像当前窗口内的区域像素点,可以通过排列顺序所决定[4]。一般在非线性滤波器中,中值滤波可以作为较为常见的排序标准,其在复杂场景非显著目标跟踪过程中,可以对图像自身的模糊程度具有更好的降噪效果,如行进中的步态跟踪,可以获取较高的清晰度图像,实现准确跟踪。
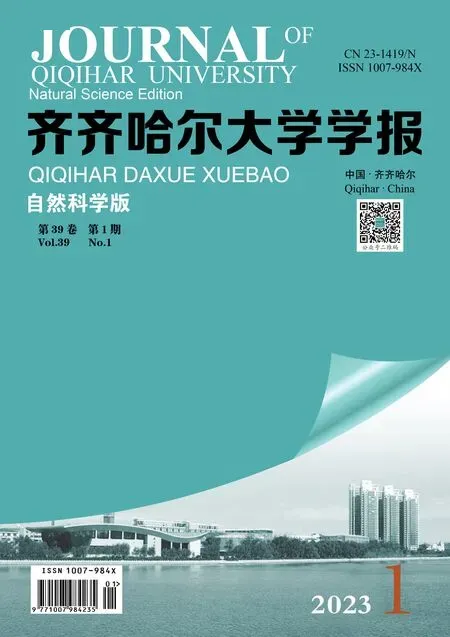
统计滤波最大中值方法需要依次滤波去除等对滑动窗口内4个方向上的像素点后,再将选择的最大值作为输出结果。设置滑动窗口为2+1正方形大小,则其像素点个数为8+1,对其最大中值滤波器进行定义,表达式为[5]

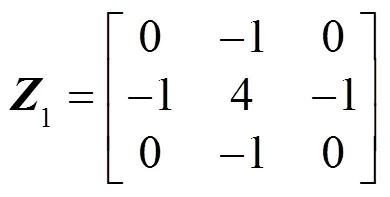
在此基础上设置滑动窗口为5×5标准,最大中值滤波像素位置关系为,如下:

式中,像素位置点为[6-8]。排列4个方向上的对角线,如图1所示。
图1中分别呈现两条对角线以及在中心像素点位置上,两条垂直方向的像素过滤情况。
而对复杂场景特征区间分类时,可以采用卷积模板来表示中值滤波的响应函数,按照4个方向上的像素分布情况,根据目标大小定义矩阵模板大小[9]。表现为3×3和5×5的两种模式,如下:


2 基于虚拟现实技术对应区间目标坐标位置
对目标的定位跟踪需要对其具体坐标定位,按照虚拟现实技术转换目标三维数据,将采集的二维复杂场景图像信息过渡为三维目标空间信息,以此追踪目标点的位置坐标,实现非显著性目标跟踪。



通过三角面内的坐标位置,将输出的作为定位数据,同时完成虚拟迭代跟踪非显著目标。
3 模糊逻辑构建隶属度函数跟踪非显著目标
模糊逻辑是将模糊集合理论、模糊推理过程相结合,在现实问题上解决复杂的非线性映射关系,按照模糊化和去模糊化的模块组合形式。在逻辑系统内输入待追踪的包含非显著目标的复杂场景图像,并将其转化成设定好的模糊集合,根据对应的模糊规则,推导出非显著目标所在位置,进一步提高跟踪效果。


表1 贝叶斯分类规则


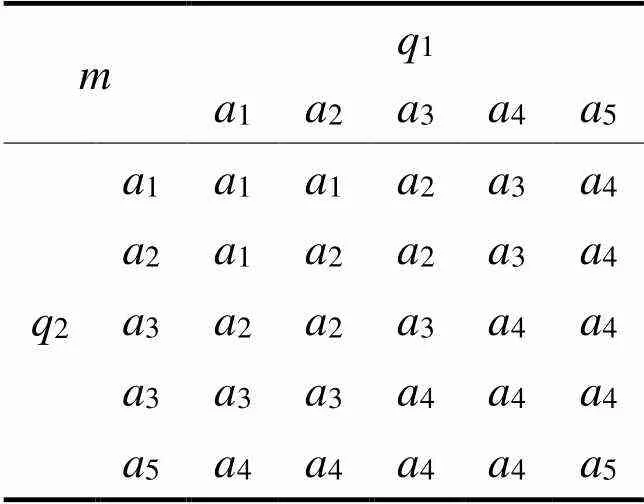
表2 模糊变化准则

4 实验测试分析
通过虚拟现实技术的应用,设计了复杂场景内非显著目标的跟踪方法,为验证其具有应用效果,设计下述实验。实验分别设置多组实验场景,序号为A-E,对设定的目标物跟踪,以验证本文方法的准确性。
4.1 基本场景内跟踪测试
为验证本文方法能够进行实时有效跟踪,首先测试挑战因素较少的场景,在其内部跟踪目标物,并完成目标定位。设置该环境中包含多个植被,定位跟踪其中的“较矮”树木,具体测试结果如图2所示。

图2 场景A测试跟踪结果
本文方法对描述场景进行虚拟化设置,关联到目标任务,不仅真实地还原了环境中的物体特征,也准确地完成了任务目标跟踪,具有较好的实际应用效果。其主要原因是所提方法利用正交原理计算空间位置,获取了对应区间目标坐标,提高了物体特征还原度。
4.2 强烈光感变化场景
根据前文实验结果来看,此次设计的跟踪方法均具有一定应用效果,因此在剩余的四组场景,均设置为具有挑战性的测试内容。设定场景B内被跟踪目标,会在强烈光感变化下发生曝光,以此追踪光照后的微小目标。在博物馆内的展品台中,标记灯光下壁画中的人物,测试结果如图3所示。
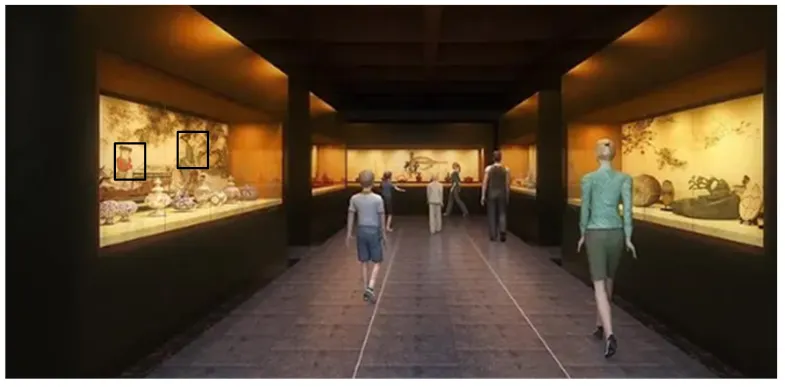
图3 场景B跟踪效果对比
在拟建过程中,本文方法通过中值滤波设置了图像窗口大小,并统计相邻像素点最大中值,避免了光感对目标任务跟踪的影响,在完成了灯光下壁画中的人物的准确跟踪,对光感变化具有较强鲁棒性,具有较好的实际应用效果。
4.3 干扰物设定下测试结果
在场景C内引入干扰项目,设定a组目标为跟踪对象,b组目标为干扰对象,利用本文跟踪方法对目标进行定位。建立单个相似对象和多个相似对象的干扰组别,测试结果如图4所示。

图4 场景C跟踪效果对比
根据图4可知,本文方法在出现干扰时没有发生偏移,可以准确对目标进行定位,且可以完成连续跟踪。说明本文方法采用最大隶属度量方法构建隶属度函数,实现了复杂场景内非显著目标跟踪,具有较好的跟踪效果。
4.4 出现遮挡时目标跟踪结果
考虑到目标跟踪过程中,会出现遮挡现象,场景D中设置遮挡项目,以农场为测试环境,跟踪定位到被遮挡的牛和猪,两个对象,测试结果如图5所示。
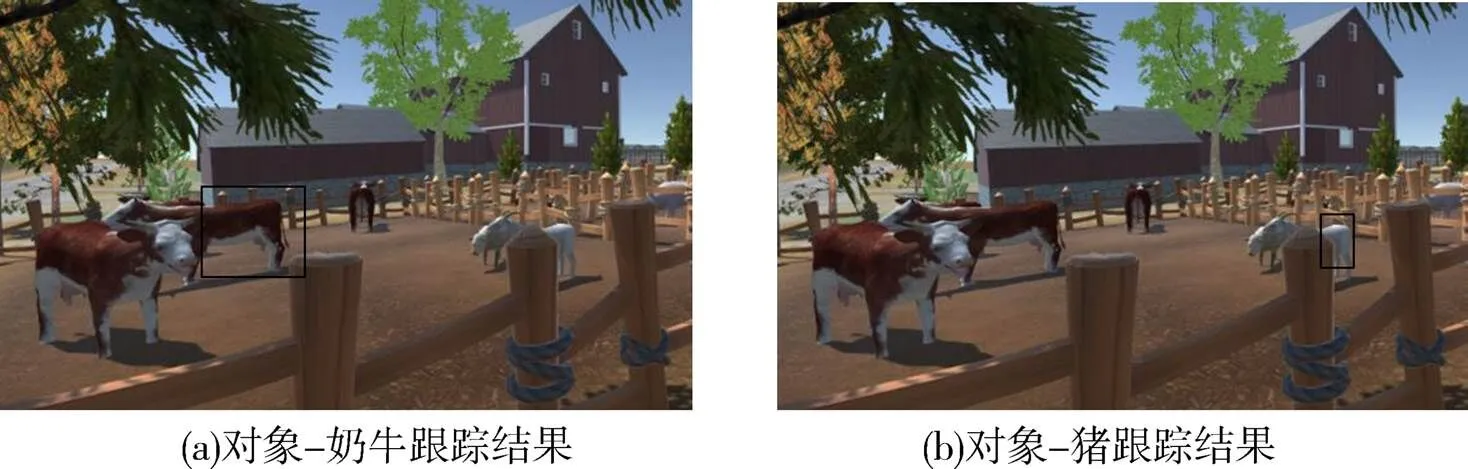
图5 场景D跟踪效果对比
图5中本文方法没有发生偏移,能够对目标对象进行跟踪,说明本文方法具有较好的应用效果。其主要原因是本文方法预先设置了图像窗口大小,获取了目标相邻像素点的最大中值,提高了跟踪效果。
4.5 快速运动过程中目标跟踪结果
在场景E为目标物快速运动状态,选择行走过程中的行为特征为跟踪目标,持续地跟踪定位手和脚,结果如图6所示。
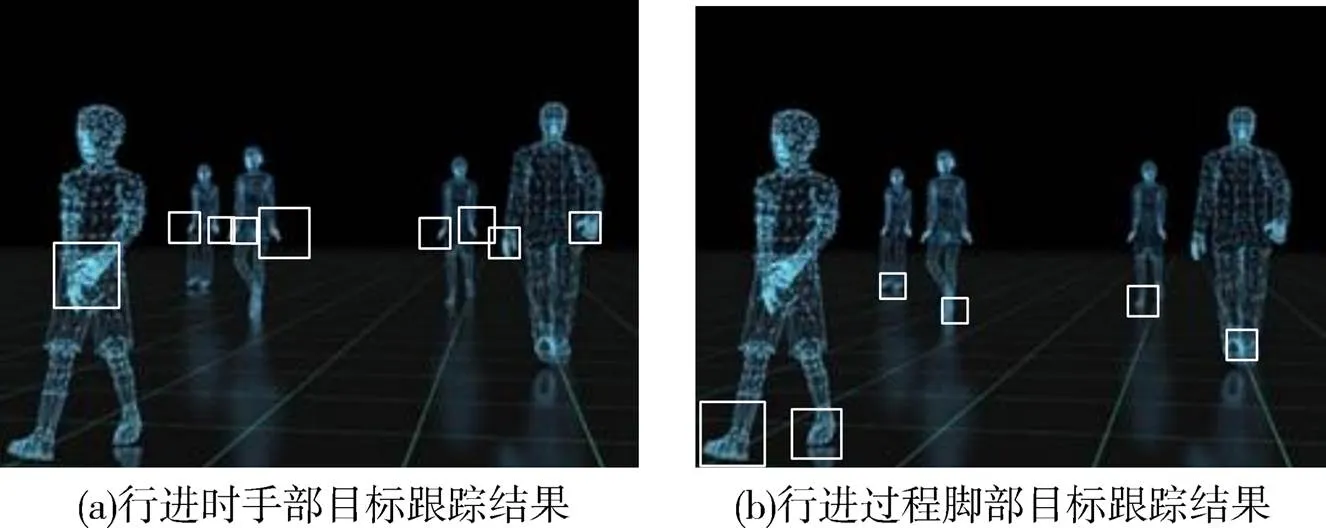
图6 场景E测试跟踪结果
图6中,本文方法设定模糊逻辑集合,依据构建的隶属度函数能够判断目标模糊状态,实现全过程的持续跟踪,且定位效果非常准确,具有跟踪应用价值。
4.6 信息熵客观测试
采用本文方法与文献[2]方法、文献[3]方法三种跟踪上述6幅不同场景的图像,统计所跟踪图像信息熵,对比结果如图7所示。从图7可以看出,采用本文方法的跟踪结果信息熵均高于两种对比方法,对比结果有效验证本文方法具有较高的跟踪性能,其主要原因是所提方法利用中值滤波算法获取了跟踪目标信息,提高了场景中目标的识别效果,获取了更多目标的像素点信息。

图7 信息熵对比
4.7 峰值信噪比客观测试
表3是应用本文方法与文献[2]方法、文献[3]方法,对图2场景A进行增强去噪时的平均峰值信噪比对比表。从表3可以看出,应用本文方法后的平均峰值信噪比与两种对比方法相比更高,RGB三个通道的平均峰值信噪比达到60 dB以上。说明应用本文方法对图2场景A进行去噪增强后,图像更加真实,更能满足实际工作中对非显著性目标跟踪的要求。

表3 图像增强去噪平均峰值信噪比 dB
5 结束语
本文利用虚拟现实技术提出复杂场景内的非显著目标跟踪方法,在实验测试的论证下,对不同场景内的目标物跟踪和定位,提高了跟踪准确性。后续研究中会设置更加复杂的场景环境,为精准定位和跟踪目标物,提供更加有效的跟踪方法,为定点追踪提供理论支持。
[1] 张博. 基于卡尔曼预测粒子滤波的复杂场景图像目标跟踪算法[J]. 自动化与仪表,2022, 37(06): 74-78.
[2] 刘志强,任世恒. 复杂场景下基于OSA改进的多目标跟踪算法研究[J]. 信息技术,2022(04): 123-129.
[3] 冯欣,殷一皓,吴浩铭,等. 目标关联学习的端到端多目标检测与跟踪联合方法[J]. 重庆理工大学学报(自然科学),2022, 36(04): 143-152.
[4] 林春蕾,潘光永. 基于Retinex算法的舰船无线传感网络目标跟踪方法[J]. 舰船科学技术,2022, 44(06): 149-152.
[5] 卢超超,彭炜. 基于无线传感人脸识别的空间弱小人体目标跟踪方法[J]. 传感技术学报,2022, 35(03): 405-411.
[6] 何子述,苏洋,程婷. 基于共址MIMO雷达组网系统的机会协同目标跟踪方法[J]. 空天防御,2022, 5(01): 6-11.
[7] 陈淑玲. 基于虚拟现实的定位技术的研究与应用[J]. 广西广播电视大学学报,2022, 33(01): 32-36.
[8] 达凯,杨烨,朱永锋,等. 视场非完全重叠的分布式雷达多目标跟踪方法[J]. 雷达学报,2022, 11(03): 459-468.
[9] 张昀普,单甘霖. 道路约束下多传感器协同地面目标跟踪的管理方法[J]. 兵工学报,2022, 43(03): 542-555.
[10] 王小平,施新岚. 道路复杂交通场景下的改进MDnet目标跟踪算法[J]. 重庆交通大学学报(自然科学版),2021, 40(12): 19-26.
[11] 安雷,李召瑞,吉兵. 辐射风险和多目标跟踪精度约束下的传感器调度方法[J]. 现代防御技术,2021, 49(06): 62-73, 89.
[12] 罗宏等,蓝耿,聂良刚,等. WSN中利用改进FOA-GRNN和迭代Cubature卡尔曼滤波的实时目标跟踪方法[J]. 计算机应用与软件,2021, 38(12): 135-141, 219.
[13] 王恒军. 一种复杂背景下非线性图像目标跟踪算法[J]. 自动化与仪器仪表,2021(10): 17-20.
[14] 周士琪,王耀南,钟杭. 融合视觉显著性再检测的孪生网络无人机目标跟踪算法[J]. 智能系统学报,2021, 16(03): 584-594.
[15] 黄珍,潘颖. 基于移动增强现实技术的复杂场景视频图像多目标跟踪[J]. 辽东学院学报(自然科学版),2021, 28(01): 39-43.
[16] 顾亚雄,李鑫,陈苗苗. 复杂场景下高置信度更新策略的互补跟踪算法[J]. 激光与光电子学进展,2021, 58(12): 522-530.
[17] 张正本,刘丹. 基于局部显著边缘特征的红外图像目标轮廓跟踪算法[J]. 河南工学院学报,2020, 28(05): 11-15.
[18] 方岚,于凤芹. 自适应在线判别外观学习的分层关联多目标跟踪[J]. 中国图象图形学报,2020, 25(04): 708-720.
[19] 李蕊,朱喜梅,周民,等. 基于虚拟现实技术的船舶航向自动跟踪控制方法[J]. 舰船科学技术,2020, 42(02): 67-69.
[20] 聂春萌,杨建伟. 虚拟现实系统中多自由度电磁跟踪方法仿真[J]. 计算机仿真,2019, 36(04): 330-333.
Research on non-salient target tracking method in complex scene based on virtual reality
SHAN Sheng
(Software College, Anhui Vocational College of Electronics & Information Technology, Anhui Bengbu 233000, China)
In order to avoid the interference factors in complex scenes affecting the tracking accuracy of non-significant targets, a virtual reality based non-significant target tracking method in complex scenes is proposed. Set the size of the image window through median filtering, count the maximum median of adjacent pixels, and define the feature interval of complex scene. Based on virtual reality technology, the three-dimensional information of tracking plane is converted, and the spatial position and the corresponding interval target coordinates are calculated by using the orthogonal principle. The fuzzy logic set is set, and the membership function is constructed by using the maximum membership measure method to track non-significant targets in complex scenes and complete the tracking of non-significant targets. Multiple sets of target tracking scenarios were set up to test the tracking effect of non-significant targets under five groups of conditions, namely, less influencing factors, strong changes in light perception conditions, rapid movement and occlusion interference background. The experimental results show that the proposed method can accurately track and locate the target in the above settings.
virtual reality;complex scene;non-significant target;target tracking
2022-08-10
安徽省高校自然科学研究项目“虚拟现实技术在影视动画中的实时场景交互应用研究”(KJ2021A1487)
单盛(1981-),男,安徽蚌埠人,讲师,硕士,主要从事数字媒体技术应用研究,baibaissy@yeah.net。
TP391.41
A
1007-984X(2023)01-0053-06