水环境监测场景中的自主巡航无人船系统
2023-03-01吴昊吴子昂孟庆斌刘广伟
吴昊,吴子昂,孟庆斌,刘广伟
(南开大学 滨海学院,天津, 300270)
0 引言
如今,我国普遍采用固定水质监测站以及现场人工取样进行检测两种方式。这些检测方法都存在一些弊端,如检测效率低且费时费力、检测地点有限不灵活等。具有自主巡航能力的无人船系统与传统的固定点水质监测系统不同,该系统具有较好的灵活性,可以快速部署到指定水域,按照终端输入的参数实现无人船自主巡航,进行移动监测,大幅减轻工作人员的工作量,降低工作的危险系数。通过前端传感器可以采集水体温度、溶解氧、浊度、pH值等信息,相关监测信息汇总到数据服务中心,为有关部门对指定水域的应急治理提供参考。
1 系统总体架构
自主巡航无人船系统使用树莓派处理命令,通过MAVLINK协议与Pixhawk控制板通信,发布位置和速度期望,由控制板控制执行机构实现无人船自主巡航功能。
如图1所示,无人船主要通过树莓派和Pixhawk控制板通信来进行无人船的航行控制,水质传感器则通过RS485转USB模块接入到树莓派中进行数据处理,地面站和服务端下发操控指令和无人船姿态信息、传感器读取则是通过4G路由器间接与树莓派进行通讯。
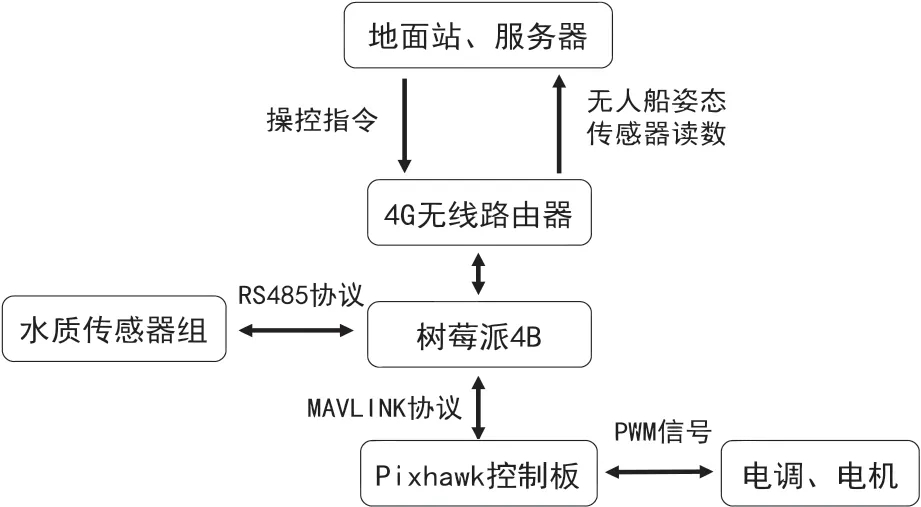
图1 系统总体架构图
2 系统硬件设计
系统硬件由五个重要部分组成,分别为:控制和导航模块、通信模块、动力模块、传感器模块、电源模块。系统实物图、硬件整体框架图分别如图2、图3所示。
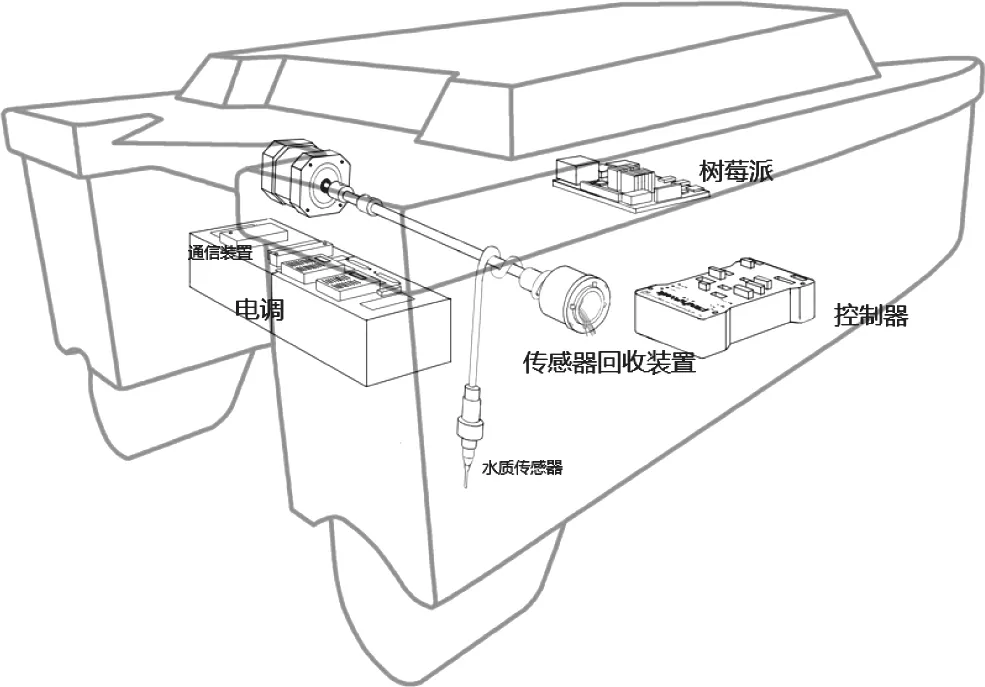
图2 船体硬件示意图
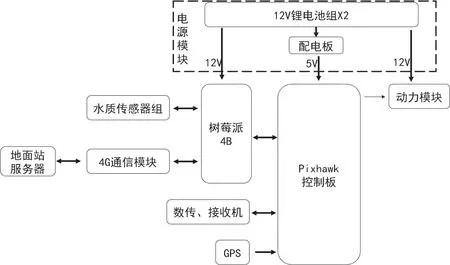
图3 硬件框架图
■2.1 控制和导航模块
无人船的控制模块采用Pixhawk2.4.8控制板,其主要控制无人船的速度以及前进方向,能够让无人船按照既定路线行驶。Pixhawk是一款32位开源的无人机控制系统,内置2组加速计、2组陀螺仪、1组电子罗盘、1组数字气压计同时其扩展性强。设备处理器以STM32F427主控及STM32F100故障保护协处理器作为基础,保障设备正常运行。
对于无人船的位置信息(经纬度信息以及航行方向),系统采用外置M8N GPS定位模块,同样是设备进行自主巡航功能的重要模块。该模块具有较高的灵敏度,并且体积小功耗低,其内置的电子罗盘可以弥补Pixhawk内部电子罗盘易受干扰的缺点,提高系统的稳定性。
■2.2 通信模块
通信模块由接收机、数传、4G工业级无线路由器构成。在能够使用人工的条件下,可以使用手柄与接收机通信控制无人船;在配备手持终端的情况下,可以通过数传连接地面站进行巡航任务的初步配置;4G路由器则是发射一个连接到4G网的WiFi,树莓派能够通过其连接到Internet与用户终端进行巡航任务的配置和数据传输。
通信模块均采用现成的成品模块:接收机为FS-IA6B六通道接收机,通过PPM协议用杜邦线与控制模块相连,实测与遥控器连距离约500m;无线数传采用433MHZ频段,实测通信距离约800m,通过4pin-1.25mm的接线端子连接到控制器的串口2上;4G路由器使用的是有人云4G工业无线路由器,插上物联网卡后路由器能够提供WIFI信号供树莓派连接,在周围基站信号强、直径200m的湖面上能够稳定地连接到Internet。
■2.3 动力模块
对于动力模块而言,其主要组成部分为电机和电调。系统采用有刷直流电机和有刷直流电机电调,电调信号线支持两路PWM,通过改变两路PWM信号的占空比能够调节电机的速度和正反转,电调的PWM信号与控制模块的PWM接口直接相连。PWM信号占空比与电机的运动情况如图4所示。当PWM1线上产生方波、PWM2线上只有低电平信号时,电机正转;反之,电机反转。方波的占空比可以调整电机的转速。
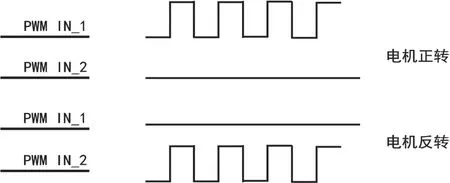
图4 PWM信号控制电机正反转示意图
■2.4 传感器模块
设备搭载RS485通信协议的水质传感器,能够在运行时进行水质检测。水体酸碱平衡、水体浑浊、水体溶解氧、电导率等是检测水质和判断水质纯度的重要指标。系统采用了四个不同的传感器对这四个指标进行检测,传感器参数如表1所示。
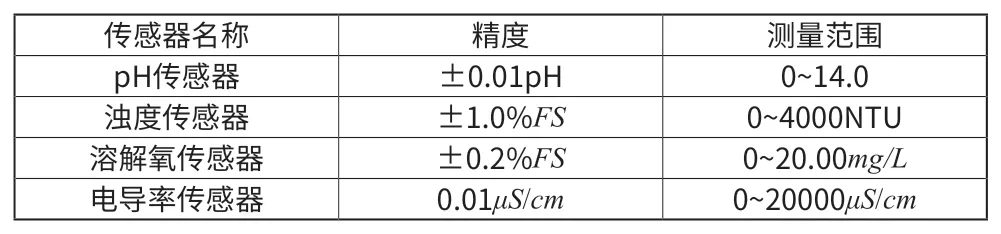
表1 传感器测量精度和测量范围
如图5所示,为避免传感器在水中受到损坏,我们设计了传感器回收装置。①为控制电机,能够实现正反转和调速;②是轴杆,用于承载传感器线缆;③是滑环,滑环的两侧带有能够传输信号的线材,一端旋转时另一端可以保持固定不动,同时不影响信号线材上信号的传输;④为传感器,传感器线材最大长度2.5m,在电机的转动下能够缠绕在轴杆上。
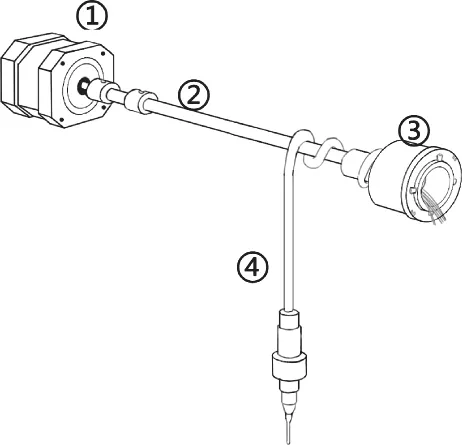
图5 传感器回收装置
■2.5 电源模块
船体上搭载多个传感器以及执行机构,不同的子模块需要不同的电源电压。为了能够便于充电、组装,系统使用12V电源统一供电,12V电源直接接入电调。对于机载电脑树莓派、传感器、Pixhawk控制板的供电,我们采用了TPS5430降压芯片的降压模块作为其供电方案。
硬件设计中的DCDC降压模块参考TPS5430数据手册中的原理图,如图6所示。设计时可以通过D1上的正向电压VD和电感支路上的等效电阻RL设计输出VOUT的大小。系统搭载的降压电路的元件参数与图6一致,该电路设计支持10.8~19.8V宽电压输入,5V输出,最大输出电流3A,输出电压波纹30mV,开关频率500kHz,该降压电路适合作为嵌入式设备的电源。
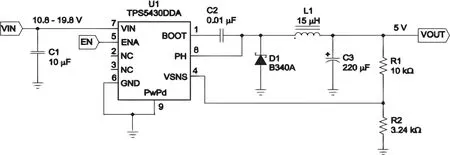
图6 TPS5430降压电路
3 系统软件设计
■3.1 系统程序框图
根据系统设计,无人船会按照期望速度自主航行至待测水域,等待当前待测水域检测完毕后再自主航行至下一个水域,直到所有目标水域检测完毕后返航。船体每次到达航点都需要停留一段时间用于执行水质检测任务。由于QGC执行的巡航任务无法完成间断性的巡航,于是我们利用MAVROS包编写了新的巡航程序。完整的巡航程序和传感器通讯回收程序框图如图7所示。
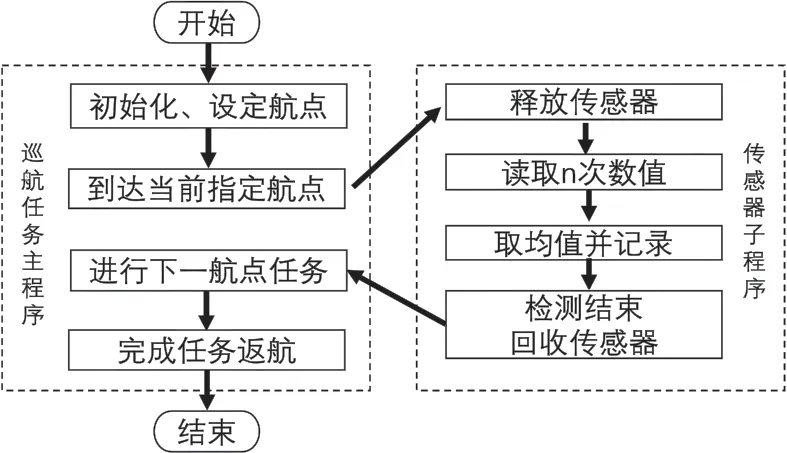
图7 系统程序框图
■3.2 巡航任务子程序
巡航任务子程序的主要功能是无人船能够按照程序中内置的几个巡航点完成巡航任务,无人船巡航的过程可以看作是无人船点到点的运动过程,我们需要对无人船的运动过程进行建模。
3.2.1 固定双桨无人船运动学分析
系统采用固定双桨型的船体,电机同速时前进,依靠左右电机差速进行转向。无人船在水中的运动包含纵荡、横荡、垂荡、横摇、纵摇、艏摇六个自由度,为了便于分析,实际可对自由度进行简化,只考虑横摇、纵摇、艏摇三个自由度的运动过程。另外,我们需要建立合理的坐标系用于精确描述船体的运动过程,采用NED坐标系作为世界坐标系,船体坐标系X轴指向船头平行于海面,设沿其方向的前向速度为u,Y轴方向垂直于X轴向左,沿着Y轴方向的速度为v,Z轴垂直于水平面指向地心。另设r为船体坐标系下的艏摇角速度,x,y,ψ分别为NED坐标系下的X轴坐标,Y轴坐标和偏航角,示意图如图8所示。
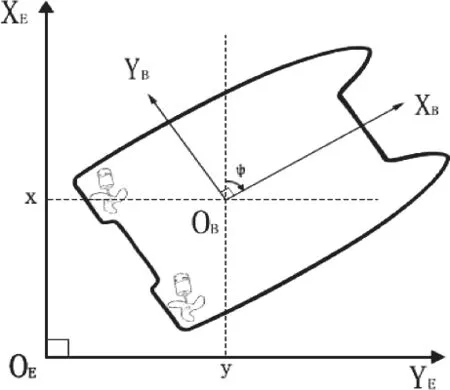
图8 NED坐标系和船体坐标系平面示意
设转换矩阵:
则得到固定双桨型无人船运动学方程:
考虑到无人船的动力学和推进运动与回转运动的解耦,这里参考任帅[3]提出的固定双桨无人船动力学模型:
于是我们便得到了无人船前进、转向和左右两桨电机的电压(或转速)的关系。
3.2.2 WGS84坐标系下计算两点距离和方向角
采用Geographiclib包中的WGS84.Inverse函数来计算两点之间的距离和方向角输入参数当前位置点和目标位置点参数(lat1,lon1,lat2,lon2),传出(a12,s12,azi1,azi2),其中s12是两点之间的距离,Azi1是当前位置点1到目标位置点2的这条向量与北0度方向上的线的夹角,即无人船的期望上的方向角。
■3.3 传感器子程序
传感器子程序主要包括传感器的回收装置的控制和传感器采集、数据发送这两个部分。为了实现树莓派能够通过4G路由器与终端进行UDP通信,我们采用了花生壳内网穿透的方案,在树莓派上安装Phddns服务程序,完成花生壳的线上配置,用“Phddns Start”命令启动内网穿透服务。
3.3.1 传感器回收装置的控制
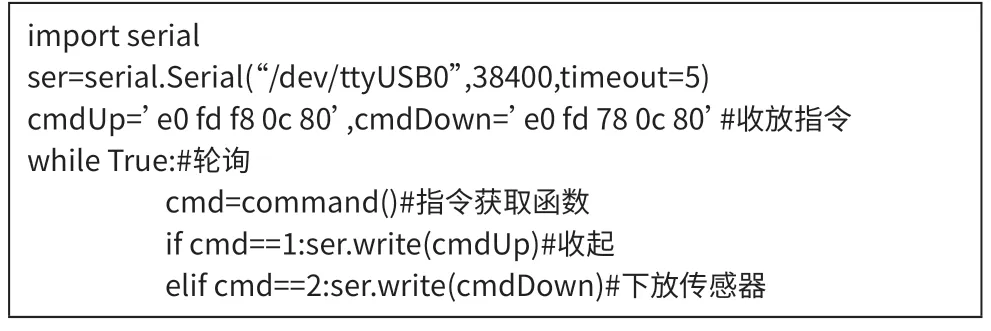
因为传感器价格昂贵,为了保护传感器在无人船航行中不被损坏,系统用串口控制42步进电机以一定的速度正转或倒转,实现传感器的收放功能。树莓派收到指令后通过串口向42步进电机发出释放传感器的指令,发送与数据接收均为十六进制,其数据指令帧如表2所示。

表2 42步进电机串口直接位置控制指令帧格式
其中A的最高位表示方向,低7位表示电机的转速。B和C组成Uint16_t类型的数据,表示要发送的脉冲数。这部分主要通过Serial库实现与42步进电机的串口通信。简化后的重要代码如下所示:
3.3.2 传感器采样和数据发送
程序引用Socket函数库,在地面站发送端程序设置树莓派4B的IP地址和端口号;树莓派4B部署接收端程序持续对端口监听,即可通过UDP协议在地面站向树莓派4B发送开启传感器指令。
释放传感器后,树莓派4B再向传感器发送采集指令,每次采集间隔两秒,采样10次。使用Binascii库从返回的十六进制数中提取出数据,再使用UDP协议将数据返回到地面站并上传到终端设备。传感器采样和数据发送的逻辑如图9所示。
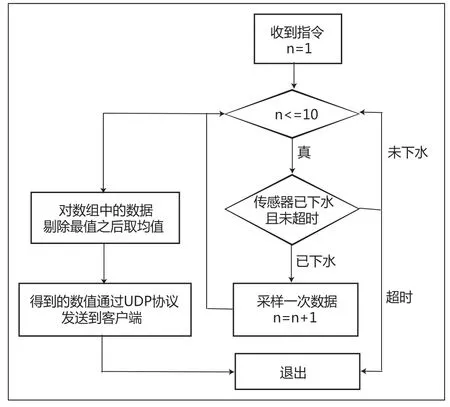
图9 采样和UDP发送程序流程图
4 系统测试结果与南星湖水质评价
系统设计完毕后,我们在南星湖上进行了船体实际巡航以及水质检测方面的测试,无人船部署测试场景如图10所示,记录的传感器数据绘制成折线图的形式如图11所示。
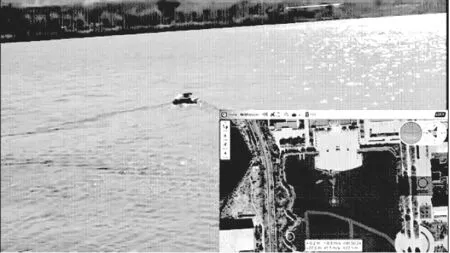
图10 无人船实物演示
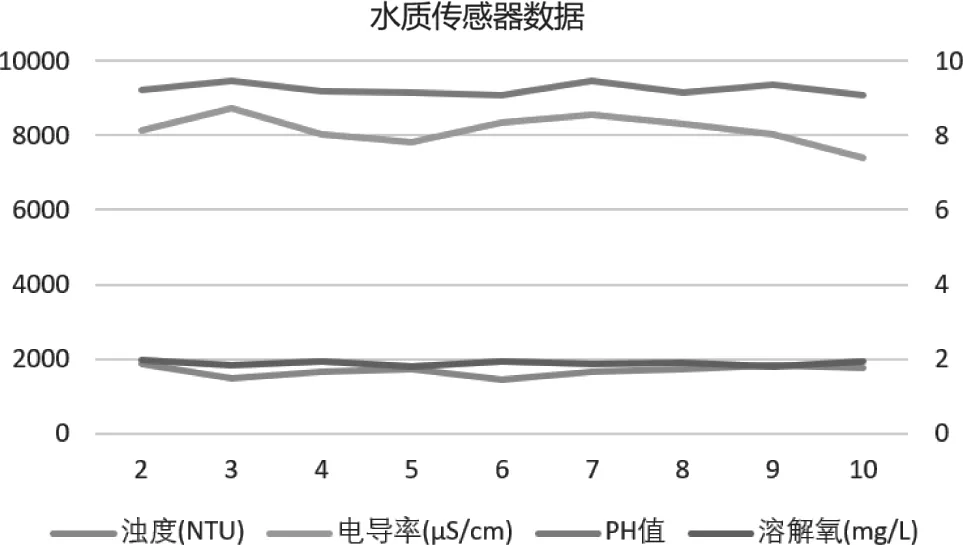
图11 南星湖水质实测记录
经测试,无人船可以自主巡航到指定水域并进行水质检测,任务结束后自动返航,实现了预期目标。从表中可以看出,南星湖的湖水呈碱性,这与南星湖周围土壤中存在大量盐碱物质这一事实相符合,同时PH值与电导率也存在一定联系,而靠近湖水岸边航点的水质浊度也明显高于靠近湖面中央航点的水质浊度。此外,湖水溶解氧偏低,且水体呈现绿色,初步推测是水中的微生物和水体藻类的大量繁殖消耗了过多的溶解氧。
5 结束语
本文设计了一款能够适应于江、河、湖等广泛水域的无人自主巡航水质检测船。该设备能够对水域进行水质检测,该系统可快速部署到指定水域位置,满足突发水域的检测需求,具有较高的灵活性。通过指定路线的地面站进行路径规划,实现无人船自主巡航功能。船上所搭载的相关水质传感器,可对所处水域进行相关水质参数的检测,同时能够通过无线通信模块将检测数据上传至服务器,利于工作人员对数据进行查询和分析,提升工作效率以及达到节省人力物力资源的目的。
