基于Canny算子的低照度图像特定区域边缘提取方法
2023-02-27裴云霞张海民
裴云霞,张海民
(1.宣城职业技术学院 信息与财经学院,安徽 宣城 242099;2.安徽信息工程学院 计算机与软件工程学院,安徽 芜湖 241199)
在低照度环境下获取的图像,因其成像时光照不均匀,在图像细节信息提取中容易出现偏差,需要通过增强处理手段对图像进行全面检测,以保证该类型图像的特征信息具有较好的获取效果。为实现低照度图像的细节信息检测,许多科研人员通过不同的技术手段设计图像提取方法。刘建思等[1]提出了边缘检测方法,通过参数化理论设计推导模型,再根据模型获取边缘提取的梯度算子,对数字图像的低亮度区域进行敏感因子分析,以区分区域边缘特征与其他区域特征。虽然该方法在不同标准下实现了图像边缘的检测和提取,但没有考虑噪声条件等其他因素的影响。万方等[2]利用阶跃滤波方法分解图像亮度分量,实现了低照度图像边缘的增强和检测。该方法的优势是在阶跃滤波器的作用下,对低照度图像进行平滑滤波处理,增强重点并突出低照度图像的细节部分,以此保留更多的图像细节和边缘信息。使用阶跃滤波器虽然能够避免低照度图像的重组偏差,在增强过程中具有一定的提取优势,但受噪声等干扰条件的影响,在提取过程中仍会丢失部分细节。
为实现高标准的图像边缘提取效果,综合上述传统方法的优势,本文提出一种基于Canny算子[3-4]的低照度图像特定区域边缘提取方法。
1 基于Canny算子的低照度图像平滑处理
低照度图像边缘[5-6]特征的提取过程包含多个步骤,由于低照度图像[7]在获取时具有光照不均匀性,在数字图像内会存在噪声等多种影响因素,为此,需要在边缘提取前进行平滑处理。本文利用Canny算子中的高斯函数J(x,y)对低照度图像的噪声进行平滑处理。J(x,y)计算公式为

(1)
式中:x、y分别为水平和垂直方向,δ为高斯函数的标准差。
J(x,y)在不同方向中可形成多种表示形式,方向导数JF计算公式为
(2)

(3)
(4)
(5)
式中:G为常数,K1(·)、K2(·)为平滑处理过程中分解的一维滤波函数,二者的计算公式为

(6)
将分解的滤波器作为处理基础,分别对初始图像的不同方向进行卷积,则x、y方向上的平滑偏置导数Lx、Ly计算公式为
(7)
再根据x、y方向上的偏置导数,获取原始低照度图像的平滑结果:

(8)

(9)

(10)
式中:Z(x,y)为平滑后的低照度图像,(C,V)为像素点,Zx(C,V)和Zy(C,V)分别为x和y方向的梯度幅值,Ly(C,V)、Lx(C,V)为该像素点上的偏置导数,B(C,V)为像素幅值,ε(C,V)为梯度方向[8]。
2 基于注意力机制的特定区域边缘特征提取
以高斯函数对图像中噪声[9]的平滑处理结果为基础,通过偏置推导得到新的低照度图像,再进行特定区域的边缘检测[10-12],最终实现边缘提取。
注意力机制是深度学习技术的一种学习方式,将该机制用于低照度图像边缘提取时,能够划分出低照度图像中的不同区间,将图像的特征[13-14]分为多个层级,标注出不同光照边界。根据注意力机制的生成原理,为保证低照度图像的信息细节不丢失,在相同维度内提取低照度图像边缘[15-16]。提取过程为
(11)
式中:zcv为矩阵条件数,α(·)为指数函数,m为低照度图像特定区域边缘提取[17]中像素个数,c、v为边缘像素,bv为矩阵b的第v个位置元素,nc为矩阵n中第c个位置像素,n可直接表示通道数。
矩阵b、n具有相同维度,由于低照度图像在传递过程中会存在缩放、旋转等变换,此时其维度会发生改变,需要进行转置以保证提取效果。转置输出结果o计算公式为

(12)
式中:β为注意力机制的学习参数,初始化β=0;Wv为矩阵W中第v个位置像素;χ为图像纹理特征。
在低照度图像的特征空间维度中提取边缘特征[18],特征空间维度的整体分布QP计算公式为
(13)

可以将信道特征的权重作为每个特征的重要程度,以此实现特定区域边缘提取,提取结果为

(14)
式中:A″为隶属A的特征通道,IP为第P个元素的权重,S(·)为激活函数。
根据注意力机制完成低照度图像边缘提取。
3 利用逼近函数优化边缘提取结果
根据上述边缘提取结果,使用逼近函数在特定区域内实现边缘提取优化。在逼近函数中存在领域梯度,可以对低照度图像的像素特征进行垂直和水平方向上的分类,以此实现边缘[19-20]特征的提取。2个方向构成平面的逼近函数axy计算公式为
axy=sx+dy+f,
(15)
式中:f为潜在算子,s、d分别为领域梯度。在满足对称性要求下计算方向梯度s、d的计算公式为
(16)
(17)
式中,g、h分别为领域梯度s、d中的元素。
上述梯度可以直接作为提取模板,在该模板下获取2个方向上的推导函数jx和jy,二者计算公式为
(18)
在低照度图像特定区域边缘提取优化过程中,根据上述推导函数需要对g、h赋值,并将模板转化为一体化模块,以对应正交的2个方向。一般情况下,g、h的赋值为整数,赋值后的梯度模块l1、l2、l3、l4表示为

(19)
(20)

(21)
(22)
l1、l2为特定方向上具有同性性质的边缘提取模板,可以直接检测特定方向的边缘;l3、l4为旋转后产生倾斜时利用的提取模板,是2个相互垂直的梯度模块,可以选择性地提取45°或135°方向上的边缘。至此,本文通过Canny算子实现了低照度图像特定区域内的边缘提取。
4 实验过程与结果分析
4.1 实验图像样本选择
LOL(low-light image and video enhancement benchmark)数据库包含不同场景、不同设备和不同光照条件下的低照度图像。该数据库中的图像均具有低对比度、噪声、模糊等问题。本次实验从该数据库中随机选择一组低照度图像进行实验检测,图像测试样本见图1。
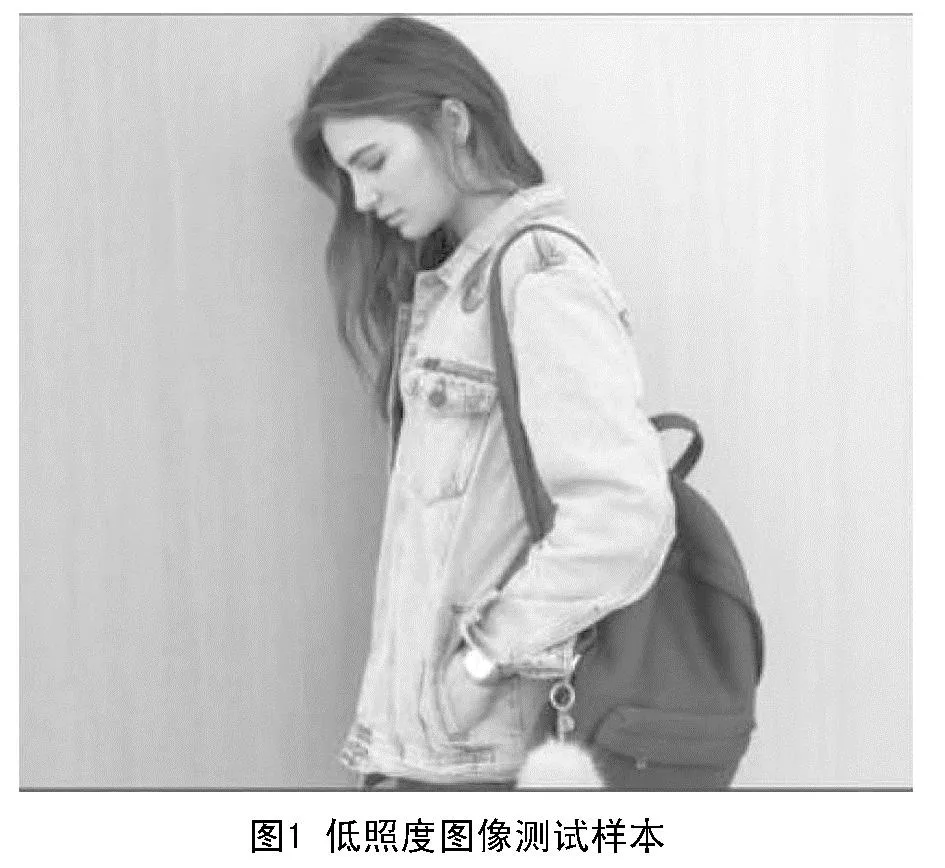
在图1中,低照度图像测试样本存在亮度不均匀等问题,通过检测图像中的噪声含量发现其噪声超过30%,符合此次实验测试条件。
4.2 不同对比方法及评价指标
本文实验将图像测试样本输入MATLAB测试平台,将本文所提方法与文献[1]参数化提取方法及文献[2]基于阶跃滤波器的提取方法进行对比测试,验证本文所提方法是否可以有效地对低照度图像进行特定区域的边缘提取。
仅通过主观判断无法保证测试精度,因而本文选择信息熵和平均梯度作为不同方法提取效果的客观评价指标,进一步分析不同方法的提取效果。其中:信息熵表示图像信息的丰富程度,信息熵值越大,说明提取的信息量就越多;平均梯度用于衡量图像清晰度,平均梯度值越大,说明提取的纹理越清晰,图像的边缘信息保留的就越多。
计算差方可以提高边缘检测的准确性和抑制噪声干扰,x、y方向上的方差的rx、ry的计算公式为
(25)
式中,N为图像的像素数。
图像信息熵t和平均梯度q的计算公式为

(23)

(24)
式中:p为灰度等级,iu为灰度值为u的像素点与总像素比值,q为平均梯度,w、e为图像行数和列数。
4.3 图像特定区域边缘提取效果
不同方法在特定区域内对样本图像的边缘进行提取,提取结果如图2所示。
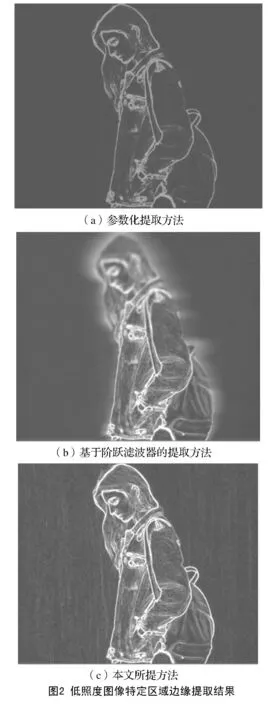
由图2可知,从主观视觉效果上来看,基于参数化的提取方法考虑了中心像素的差分问题,可以检测出绝大部分边缘,但存在细小特征丢失的情况。基于阶跃滤波器的提取方法对重要部分也可以准确提取,但存在模糊边缘问题。本文所提方法对图像进行了高斯平滑处理,最大程度地消除了图像中的噪声,提取的边缘更趋近于理想的单像素边缘,整体效果最好。
4.4 图像边缘提取效果的客观评价
不同方法提取效果的客观评价结果如图3所示。
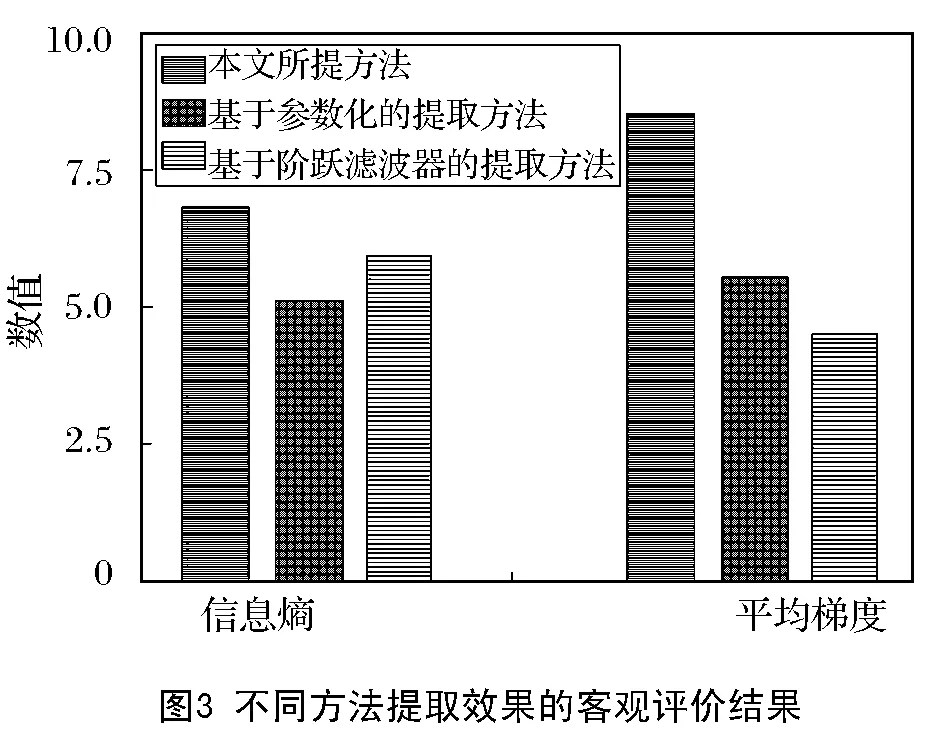
由图3可知,在客观评价分析中,2种对比方法对噪声的抑制效果较差,边缘提取的信息熵和平均梯度均小于本文所提方法。说明本文所提方法可以在抑制噪声的同时,保证低照度图像边缘提取的清晰度,具有较高的应用价值。
5 结语
本文所提基于Canny算子的低照度图像特定区域边缘提取方法能够有效去除低照度图像中的噪声,并保留较高的提取清晰度。实验结果表明,文本所提方法具有较高的信息熵和平均梯度,对于低照度图像边缘提取具有一定的优势,能够投入实际应用中。
