基于坐位调膝法的仿生推拿装置研究
2023-02-27马邦峰王殊轶钟云生
马邦峰 , 王殊轶, 钟云生, 龚 利, 邢 华
(1 上海理工大学 健康科学与工程学院, 上海 200093; 2 上海中医药大学附属岳阳中西结合医院 推拿科, 上海 200437)
0 引 言
随着科技飞速发展,中国老龄化严重程度加剧,膝关节骨性关节炎(knee osteoarthritis,KOA)的患病率约为18%[1]。膝关节骨性关节炎发病的原因较多,临床症状主要表现为膝关节疼痛酸胀、关节弯曲有异响,关节腔内有轻微骨赘,关节间隙变窄导致的软骨磨损等[2],极大地影响了患者的正常生活。坐位调膝法[3]是由上海中医药大学附属岳阳中西结合医院推拿科发明,治疗膝关节骨性关节炎的中医推拿手法。治疗时患者坐姿采用解剖中立位,双腿踩地面,医生两手拇指向上抵住患膝的髌骨下缘,其余四指环握小腿以固定。医生发出口令,让患者由坐姿开始站立,待患者完全站直后再屈膝坐下。操作过程中,两手拇指和四指相对用力,限制关节间隙的变窄程度。目前,由于中医推拿医师数量较少,高强度工作会对医生的手指造成不可逆转的损伤,给医师身体健康带来隐患。
基于上述问题,国内外研究人员对此展开了相关研究,并取得了一定的研究成果。如:杨晓京[4]等人发现,体弱人按摩力大约在20 N、一般人需要的按摩力为27 N,体型偏大的人需要的按摩力在35 N左右,并且基于象鼻类生物结构的启发,提出了一种可满足按摩输出力的软体驱动器。Yasumoto[5]开发了一款模仿治疗师按摩/指压治疗的具有多轴手臂机器人,可以响应人体姿态的变化。Chen等人[6]提出了一种将姿态跟踪算法与比例骨骼测量相结合的新方法,该方法能够充分贴合人体骨骼,为按摩机器人穴位识别提供新思路,提高其准确率和效率。
尽管关于国内外的推拿机械设备的研究很多,但是针对膝关节骨性关节炎的设备却很少。因此在上述研究基础上,并结合坐位调膝法的手法特性,利用手法数据测试平台,测量出医生在推拿时的生物力学参数,并根据参数设计出仿生推拿装置。
1 仿生按摩装置设计
1.1 推拿手法原理
骨性关节炎的病因主要是膝盖关节腔间隙变窄。在坐位调膝法的治疗过程中,医生首先让患者采取解剖中立位,双腿踩地面。当医生发出口令后,患者由坐姿开始站立,待患者完全站直后,再屈膝坐下。在患者站立的过程中,膝盖关节腔会逐渐减小,医生按压内外膝眼使膝盖关节腔间隙减小,减少软骨磨损。当患者膝盖弯曲角度增大时,关节腔逐渐减小,给予医生大拇指的反作用力越大,医生大拇指施加的压力就会越大。通过压力传感器和角度传感器,分别采集医生推拿时拇指压力及患者膝关节弯曲角度相关数据并进行分析。
1.2 数据采集设备
本文传感器设备的核心组件采用苏州长显科技有限公司研发的CX1006传感器,这是一种电阻薄膜压力传感器,传感器量程300 N,最大误差为量程的5%。此外,实验中还需要薄膜长条状的膝盖弯曲角度传感器。角度传感器与压力传感器的原理基本相同,均是通过压力和电阻之间的变化关系来实现的。在使用时,压力传感器粘贴于指套上,将指套戴于医生拇指上。角度传感器数据连接端位于髌骨上方8 cm处,用魔术贴缠绕一圈固定。在髌骨下方15 cm处也用魔术贴固定一个金属扣,将角度传感器的另一端穿过金属扣自然垂下。保证病人在站立的时候,膝盖对角度传感器没有持续的压力作用,减小了实验误差,测试的角度是小腿反向延长线与大腿的夹角。
1.3 结构设计
仿生推拿装置整体结构如图1、图2所示。
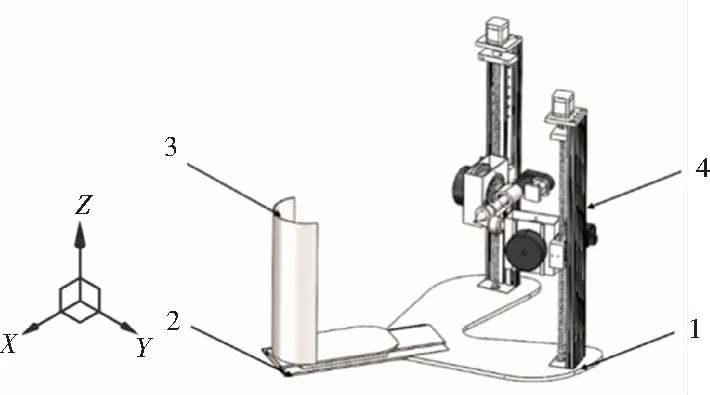
图1 推拿机器人整体结构
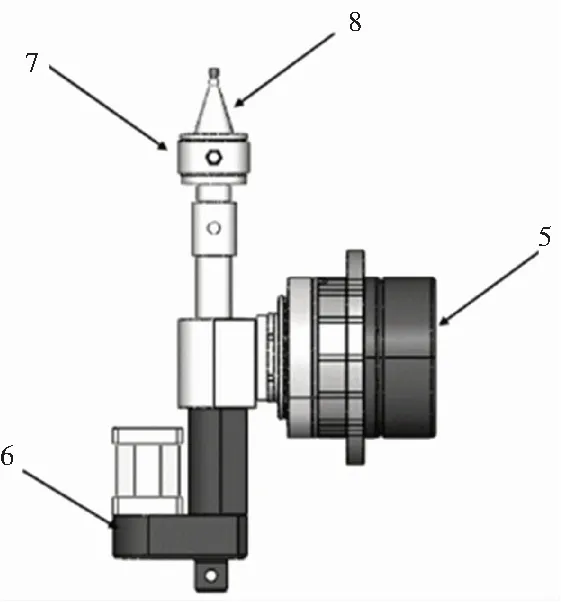
图2 仿生手臂结构
由图中可见,推拿机器人由1-底座、2-L型腿部支架导轨、3-L型腿部支架、4-升降丝杆、5-关节旋转电机、6-按摩推杆、7-单轴压力传感器、8-按摩头组成。为满足患者不同身材的需求,在底座上设计了可移动L型固定支架,可调节患者膝眼与按摩头之间的距离,方便机器运作。该装置自由度包括:仿生手臂沿Z轴上下平移自由度、关节旋转电机绕X轴旋转自由度、仿生手臂沿Y轴平移自由度、腿部L型支架沿X轴平移自由度。
(1)仿生手臂沿Z轴平移自由度。仿生手臂结构通过安装套固定在升降丝杆的螺母座上。手臂上下平移是通过升降丝杆来实现,以适应不同膝高的需求。
(2)关节旋转电机绕X轴旋转自由度。关节电机的旋转,是模拟医生推拿时拇指绕X轴方向旋转角度变化,关节电机的旋转带动按摩推杆旋转一定角度。
(3)仿生手臂沿Y轴平移自由度。按摩推杆的电机带动按摩头向前推,实现手臂在Y轴方向的平移。为适应不同患者膝眼宽度,可通过同时调节推杆的初始位置,使两个按摩头的距离产生相应变化。推杆前推时,按摩头之间的距离逐渐减小;推杆回推时,按摩头之间距离逐渐增大。
(4)腿部L型支架沿X轴平移自由度。腿部L型支架沿X轴的平移由手动调节,其目的是适应不同身材患者的小腿宽度。同时与手臂前后自由度配合,控制实现按摩头对膝眼的精准定位。
在按摩头和推杆之间装有单轴压力传感器,作为该装置的安全装置,当按摩头的推力达到最大值,单轴压力传感器会反馈给推杆的步进电机。使步进电机停转或者反转。另外在按摩头上安装有硅胶头,使机械手和患者膝盖之间是软接触,保证了患者的舒适度和安全性。
2 驱动控制设计
2.1 硬件配置
中医推拿机器人驱动控制系统主要由人机交互串口屏、STM32单片机、压力传感器、步进电机推杆、Maxon无刷直流盘式电机以及角度传感器模块组成(如图3所示)。角度传感器作为前置输入模块,主要负责测量膝盖弯曲角度搭配指尖压力传感器,模拟医生不同角度、不同按压力度手法,同时也作为后期中医推拿机器人实际推拿时标定的参考,以达到更接近医生手法的推拿设备。串口屏作为人机交互的主要方式,将各模块的控制指令及数据显示在其上面,方便医生实时检测推拿机器人的运动状态,从而更好地对患者进行治疗。此外,串口屏上还装有紧急制动按钮,以保证患者绝对安全。步进电机控制模块不仅要接受STM32CPU的控制指令,并结合压力传感器实时检测到的压力值,以脉冲驱动的方式使推杆推至相应的位置。压力传感器通过RS485-Modbus协议进行通讯,通过STM32CPU发送读取实时压力值指令,返回的数据经过串口读取,再通过STM32处理,将实时检测的压力值显示在串口屏上。Maxon无刷直流盘式电机模块配备霍尔传感器、数字增量编码器,从而可以检测转子的位置,以实现精准的控制。该模块与步进电机推杆结合控制推杆电机推杆的角度,来贴合医生不同角度坐位调膝法治疗,从而达到更好的治疗效果。

图3 推拿机器人驱动控制系统框图
2.2 按摩压力输出控制
在文献[7]等论文中曾提出,仿生推拿装置的控制是基于时间。但是在进一步的研究中发现,病人的患病程度在影像学上分为5级:0级无改变、1级轻微骨赘、2级明显骨赘、3级关节间隙中度变窄,4级关节间隙明显变窄软骨下骨硬化。随着病人患病严重程度增加,治疗的时间也会有所增加。所以在控制力输出时,本文选择基于患者膝关节角度变化控制力的输出。为了更好的研发推拿装置,需要更直观体现出医生的手法机理。所以,将10组散点图放入同一坐标系中,并通过SPSS数据处理软件进行曲线估计。根据点的分布情况分别选用二次型和三次型进行曲线估计,得到的曲线如图4所示。以患者在接受治疗时膝盖弯曲角度为自变量,医生拇指垂直压力为因变量。在治疗过程中,患者是先站立后坐下,膝盖运动是一个往复压力的变化。人为规定患者在站立过程中膝盖角度变化为“-”,在坐的过程中角度变化为“+”。由图可以看出,两种拟合模型的最大值相对接近。基于患者膝关节角度变化力的输出方程为
y=-0.004 13x2-0.042 78x+45.063 77
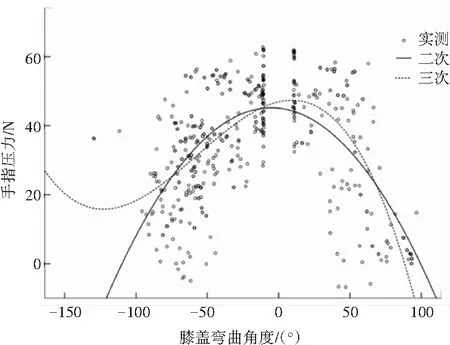
图4 按摩压力输出曲线图
根据图4不难看出,部分患者膝盖弯曲的最大值已超过90°。除了角度传感器自身的误差以外,其重要的原因是测量时患者座椅高度的控制。当座椅高度固定时,若患者的小腿较长,则膝盖弯曲的初始角度就偏大,反之膝盖弯曲初始角度偏小。
3 仿真结果分析
因装置造价昂贵、实验周期长,为保证后续装置加工的有序进行,采用工业设计软件Solidworks2021中的Motion运动仿真模块,对仿生推拿装置进行运动仿真分析,研究其是否符合设计要求。
(1)仿生手臂沿Z轴上下平移仿真结果。如图5所示,0~10 s为升降柱下降阶段,10~20 s为升降柱的上升阶段,机械臂的上下平移范围为145 mm。根据GB-10000-88国家人体尺寸表,人在端正坐立时小腿长度为331~463 mm,最大差为132 mm。因此,手臂上下平移自由度符合人体设计要求。
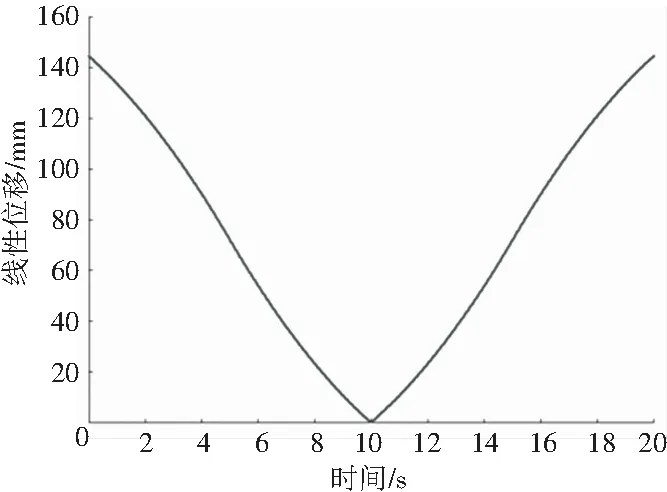
图5 仿生手臂高度调节仿真结果
(2)关节电机绕X轴旋转角度范围仿真结果。如图6所示,0~10 s为按摩推杆沿Y轴逆时针旋转,10~20 s为按摩推杆沿Y轴顺时针旋转,角度变化在10 s处达到最大,机械臂旋转角度范围为0~28°。患者由坐到站立的过程中,关节旋转电机的旋转角度随着患者膝关节角度的增加而增大,同时推杆电机驱使推杆沿Y轴位移,使按摩头对膝眼产生力的作用。0~10 s为按摩推杆前推位移,10~20 s为按摩推杆回归原处位移,位移范围为0~15 mm。
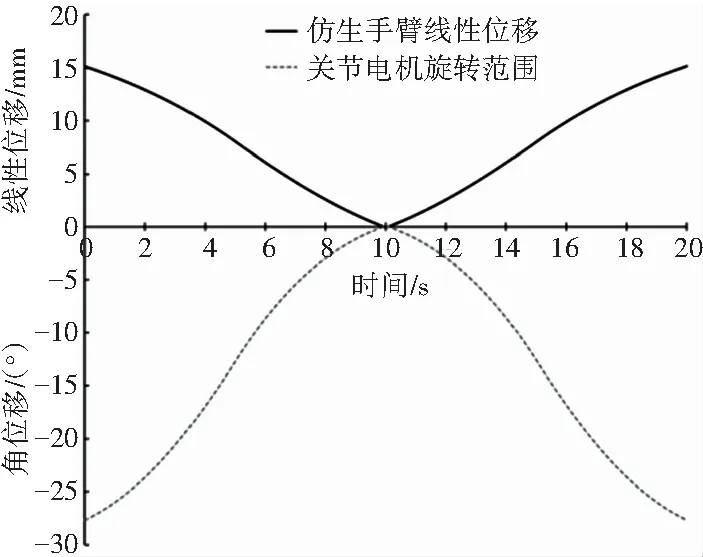
图6 关节电机角度旋转仿真结果
(3)腿部L型支架沿X轴平移范围。如图7所示,支架前后位移范围为0~200 mm。0~10 s内L型支架沿X轴负方向匀速位移200 mm,10~20 s为L型支架沿X轴正方向匀速位移200 mm,回到初始位置。
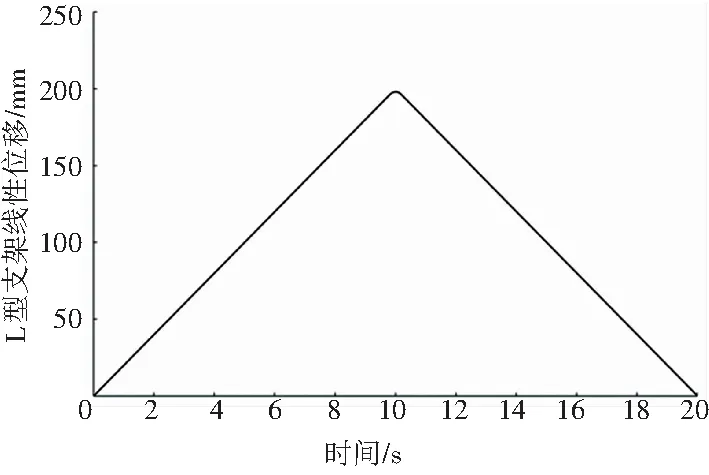
图7 腿部L型支架前后调节仿真结果
(4)最大垂直压力。数据共采集10组数据,选择10组数据的最大值作为仿生装置的输出力。为保证数据的有效性,需对10组数据进行粗大误差[8]分析,剔除误差数据。
本次实验对医生拇指的最大压力进行了10次重复测量,具体数据见表1,最大压力的折线如图8所示。

表1 医生大拇指最大压力表
从图8的折线变化可以看出,最大压力变化剧烈,对应的极差较大(ω=φmax-φmin),已经超过了传感器的最大量程误差。
在对测量的10组力度数据进行可行性评判时,需要保证10组数据没有粗大误差。从图中可以看出,曲线变化较大,有必要采取误差理论相关知识对力度进行处理与分析,利用3σ原则[9]对力度测量进行数据处理。
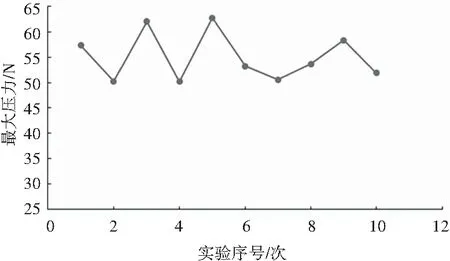
图8 最大压力折线图

(1)
其中,γi表示第i组的最大压力值。
当最大压力均值计算出后,需计算最大压力值的残余误差(见表2)。基于残差进一步可得标准差σ,如式(2)所示:
4.509
(2)
其中,vi为第i组数据的残差值。

表2 最大压力值残余误差
从表2中可知,第三组数据残余误差最大。根据3σ准则,第三测得值得残余误差,如式(3)所示:
|v3|=7.181<3×4.509=13.527
(3)
由此可见,10组最大压力测量的残余误差均满足3σ准则。因此,根据3σ准则可以判定最大压力值不含有粗大误差,10组数据均有效。
医生在进行推拿时拇指最大压力为62 N,仿真最大输出为70 N,满足设计要求。如图9所示,输出波形和医生推拿时力的波形变化较为一致。
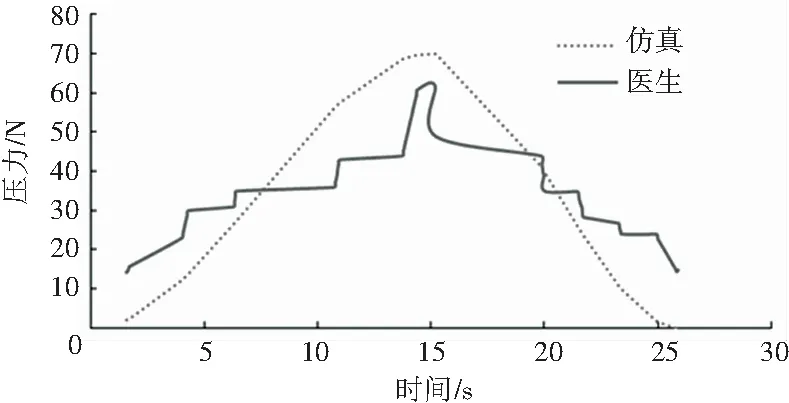
图9 仿真输出力与推拿力对比结果
4 结束语
本实验采用传感器系统,获取了医生在实施坐位调膝法时的生物力学参数,并根据参数设计出了相应的仿生推拿装置。利用Solidworks三维软件中的Motion运动分析模块对仿生推拿装置进行了可用性测试,验证了装置的可用性较高和广大的应用前景。在医生治疗阶段极大减轻了医生的劳动负荷,增加了患者的就诊机会。在装置中相比前人研究,增加了角度传感器,使推杆力的输出随着患者膝盖角度变化而变化,能更准确复现医生的推拿手法。但目前装置的局限性较大,不够便携,拟人化程度不高,虽然可以很好的复现医生手法,但装置治疗方式单一,输出力未能满足5种KOA等级患者。在接下来的研究中,继续改进仿生推拿装置算法,进一步完善仿生推拿装置。
