基于宏观基本图的道路交通网络边界控制方法研究
2023-02-27王亚伟王嘉文
王亚伟, 冯 洋, 王嘉文
(上海理工大学 管理学院, 上海 200093)
0 引 言
高密度的建成环境已经成为中国城市建设发展的主要空间特征,这使得系统复杂化的交通管理优化成为提升中国城市品质的关键。私家车的不断普及,加剧了道路拥堵的发生,对于一个城市的中心路段而言,拥堵的程度更影响着人们的出行效率。基于此,针对拥堵问题国内外学者做了大量的研究,拥堵的形成与交通需求有关。当区域的通行能力达到饱和时会发生拥堵,因此合理的控制进入路网的车辆是解决城市中心道路拥堵问题的关键。
利用政策法规对路网交通总量进行控制,比如拥挤收费、错峰出行、尾号限行等,但这些容易产生公平性问题进而引起争议[1]。同时也没有考虑到交通流的供需关系,没有从根本上解决拥堵问题,因此研究者开始从技术层面来控制路网中的交通流。近些年,有很多科研通过道路固有属性宏观基本图(Macro-Scopic Fundamental Diagram, MFD)研究路网,可以用来描述密度、流量、速度的关系,也因此得到许多学者的认可。赵靖[2]等提出基于MFD相邻子区协调控制方法,建立路网车辆进入离开交通量的协调控制模型,博弈出子区协调关系,提出以子区运行效益最大化为目标的控制理论;徐建闽等[3]通过VISSIM获取平均延误宏观基本图,通过最大积累量以及进出的车辆数建立边界信号控制策略,结果表明边界控制后路网车辆输入输出量提高,平均停车次数和平均延误得到改善;杜怡曼[4]等提出反馈边界控制结合MFD来改善拥堵状态下的交通流,进而对整个区域进行宏观调控;李轶舜[5]等通过MFD特征,提出一种固定信号配时的边界控制,通过建立车辆平衡方程来描述车辆之间的变化关系,进而确定控制方案;王力等[6]建立车辆守恒方程,描述交通流,区域内部以占有率为目标,配时为输入参数,通过反馈控制得到输入与路网内部车辆的放行关系,进行控制调节;张勇[7]等提出一种考虑过饱和状态下将区域内的车辆累积数作为一个变量,建立对应的交通流平衡方程。有学者通过对路网进行划分,使得同一性质的路网,具有相同的宏观属性,提出限流方法以及信号控制,丁恒等[8]先将路网进行划分,建立车辆平衡方程,将路网完成率最大和边界限制车辆数最高为目标,通过最优控制确定输入输出的最佳交通流,从而将饱和度降低。也有通过收费结合边界控制,实现对路网的车辆进行限流,张凌煊等[9]将城区化为不同的子区,建立车辆平衡方程,以中心城市完成率最高为目标,通过收费和控制进出量以及选择行为建立优化模型。有学者通过考虑上游排队能力,来弥补因边界控制导致的排队溢流问题,刘澜[10]等考虑到边界上游的道路存储能力,为了避免溢出,建立一种动态的扩展边界,通过控制边界限制车辆进入拥堵区,保持内部车辆在一个合理范围,张卫华[11]为了防止边界排队过长,保证内部的完成率,提出反馈阀门控制,对空余的排队空间进行分析,针对边界控制产生的拥堵,提出边界交通流分配,提前调节绿灯时间,来避免其他相邻交叉口拥堵。
相关学者对于过饱和的交通问题,通过分析区域拥堵状况,对边界进行控制,这是一种定性的判断方法,没有考虑到路段上是否有足够的空间来排队,那么采用边界控制会产生排队溢出,会导致更大范围的拥堵,从而使得控制外围溢出,运行效率降低。结合路网交通流的运行状态,针对边界控制并且考虑控制外围排队长度的缺失,本文在采用边界控制方法的基础上,研究路网边界外围路段的排队影响,提出一种动态的边界信号控制方法,所提方法能够控制车辆进入堵塞区,降低拥堵程度,同时可以保证外围排队不溢出,提高整体控制区域的运行效率。
1 宏观基本图
区域宏观基本图如图1所示。为了让城市交通网络保持在最佳运行状态,需要根据道路网中的交通流状态,实时的控制边界外围进入中心拥堵区域的车辆,以确保控制区域的车辆累积量在最佳的数值附近,从而保证控制区域整体的运行效率最大化。
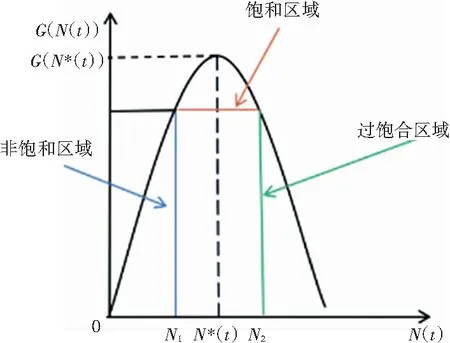
图1 宏观基本图
由图1可知,区域宏观基本图大致可以分为3个阶段:非饱和阶段,饱和阶段,过饱和阶段。第一阶段,路网内部车辆较少,没有达到饱和状态,此时的交通完成流随着路网车辆数的增加而增加;第二阶段,当路网内部的车流达到接近饱和状态时,路网的完成流在最大值附近波动;第三阶段,当路网的车辆逐渐增大,达到过饱和状态时,随着车辆不断增加路网的完成流逐渐下降,并且产生拥堵。因此,边界控制需要将拥堵区域的车辆数保持在宏观基本图体现的最佳累计值附近,也就是第二阶段。通过控制外围的车辆进入,防止车流的状态进入第三阶段,从而保证路网的运行效率。
2 边界控制方法
2.1 边界控制的基本思路
边界控制思想是通过车辆检测器获取实时的路网车辆数据,来确定是否发生拥堵,并通过拥堵区域相邻的交叉口为控制点,将这些点虚拟连接起来,形成一个包围拥堵区域的闭合控制范围,即边界控制。边界控制示意图如图2所示,确定控制的范围后依据宏观基本图理论,将拥堵区域的车辆数维持在一个最佳值附近。通过按比例的控制方法限制进入拥堵区的车流量,使得路网中累积车辆数可以保持在一个合理的范围内。本研究控制模型的核心思想:首先,根据MFD确定控制区域可以容纳的最大累计车辆数;其次,根据车辆状态演化方程,计算出下一个控制周期内进入路网的允许车辆数,并转化为绿灯时间来体现。
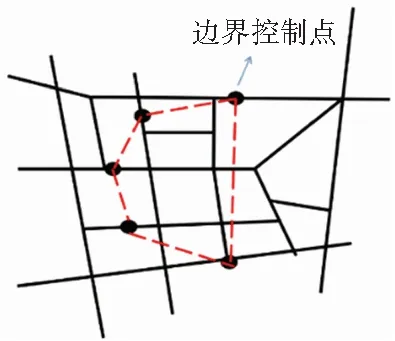
图2 边界控制示意图
2.2 建立边界控制的约束条件
边界控制并非是一种全能的方法,往往伴随着控制的强度提高而产生大量的外围边界车辆排队等待现象,进而导致排队溢出。为了防止发生这种现象,可通过可扩展边界控制,将控制路段上沿到其他路口,避免排队溢出,但并非所有交叉口都适合扩展边界,因此本文在不改变控制路段情况下,将边界控制外围的排队车辆数作为约束条件,与控制区域车辆积累量一同作为协同控制边界信号的动态输入参数,控制方法如图3所示。
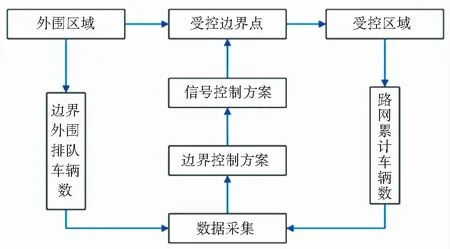
图3 边界控制方法
3 考虑动态均衡的边界信号控制方法
3.1 车辆动态守恒方程
首先将时间离散为等间隔区间,即t=k,其中,k=1,2,3,…,k是模拟时间间隔。n(k)表示k时刻区域中实时存在的车辆数,nin(k)表示在k时刻进入到区域的车辆数,nout(k)表示在k时刻离开区域的车辆数(区域表示控制区域)。系统中实时的车辆数,公式(1):
n(k+1)=n(k)+nin(k+1)-nout(k+1)
(1)
k时刻路网内部的离开路网车辆G(n(k))可由公式(2)表示:
G(n(k))=an3(k)+bn2(k)+cn(k)+d
(2)
其中,a、b、c为权重系数。
对应的第k+1周期路网内部累积车辆数如公式(3):
n(k+1)=n(k)+nin(k+1)-G(n(k+1))
(3)
k+1周期的进入路网车辆数,可以通过进入路网的流量qin(k+1),以及对应的通行时间ti(k+1)计算,公式(4):
nin(k+1)=qin(k+1)×ti(k+1)
(4)
通过拟合后的函数图获得k+1时刻最佳离开车辆数n*(k+1),对应累积车辆数n(k+1)。
通过执行边界控制时,会产生大量的控制外围区域车辆的排队。为了防止边界控制处车辆排队发生溢流,通过动态调节机制,分析当前排队长度是否溢出,并采取相应的限制溢流措施。当区域积累量超过最优阈值时,通过实时获取的车辆累积数据,对道路排队情况进行动态分析,对相关边界控制点进行交通信号调整。
(5)
(6)
将某一时刻获取的车辆数与给定的最佳车辆累计阈值之差,作为动态输入量,公式(7):
Δn(k+1)=n(k+1)-n*
(7)
其中,n(k+1)为k+1时刻区域中实时存在的车辆数,n*为路网中最佳累积车辆数。

(8)
3.2 边界控制模型
综合考虑控制区域的车辆数、最佳累计量的差值以及控制外围的排队车辆数,计算每一个周期的系统中车辆数的变化与进口出口交通流,得出每一个周期应该改变的绿灯时间,公式(9):
(9)
其中,a,b为比列参数;Δn(k)指k时刻路网内部车辆与路网最佳累计值的差值;ni(k)指对应时刻k进口道i的进入车辆数;nz(k)指对应时刻k所有进口道的进入车辆数;qi(k)指k时刻进入对应路段的车流率;qi,out(k)指k时刻离开对应路段的车流率。
下一周期的绿灯时间ti(k+1),可以通过上一周期的绿灯时间ti(k),减去Δti(k+1)每一个周期应该改变的绿灯时间计算,公式(10):
ti(k+1)=ti(k+1)-Δti(k+1)
(10)
假设按照过街行人的需求,则需要考虑最小绿灯时间,公式(11):
(11)
其中,W表示路段宽度;V表示行人过街速度;I表示绿灯间隔时间。
通过实时获取内部车辆相关数据与控制外围排队长度存在如下关系时,进行对应的控制:
(1)Δn(k+1)>0,ΔNc(k+1)>0,此时边界控制内部有发生拥堵的可能,边界控制外部没有发生溢出,此时只需要考虑内部车辆数;
(2)当Δn(k+1)≤0,ΔNc(k+1)≤0时,在第一种情况下不断进行边界限制方案,便会发生边界外溢出的可能,此时内部的拥堵得到缓解,外部排队增加,需要适当的提高边界的绿灯时间,进而减少排队溢出,需要对外边界排队进行单独控制;
(3)当Δn(k+1)>0,ΔNc(k+1)≤0,经过前面两种情况,如果车流在高峰期不断涌入路网,会形成内部拥堵现象,而外部会发生溢出的可能,此时无论单独考虑内部还是外部,都会形成拥堵,需要通过比列参数来分配绿灯时间的占比;
(4)Δn(k+1)0,ΔNc(k+1)>0,对于内部不拥堵,外部也不发生排队溢出这种情况,需要在原来绿灯时间基础上,根据交通流变化逐步增加绿灯时间。
4 仿真算例分析
4.1 路网描述与参数设定
本研究采用4个交叉口的小型路网,如图4所示。该路网有12个节点,8个进出口道,双向四车道,在每一个交叉口的上游路段设置数据采集点,路段长度250 m,将8个进口道作为边界控制点。根据公式(8)来判断边界控制后是否产生多余的排队,从而结合排队情况,进行信号调整。通过对8个进口道组成的边界控制,进行信号动态调整,维持受控区域的车辆数在最佳值附近,从而提高路网运行效率。
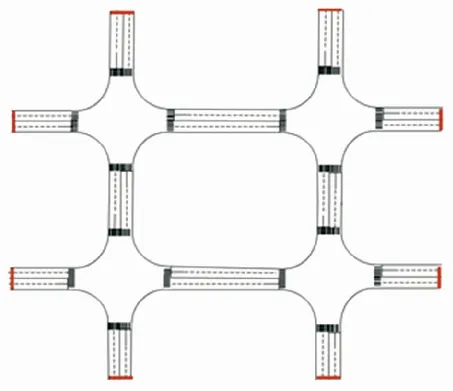
图4 路网示意图
本研究通过德国PTV公司开发的VISSIM交通模拟仿真软件,对所建立的路网进行仿真。在仿真模型中,仿真时长为2 h,每隔120 s统计一次数据,仿真精度为10 s,其中统计的数据包括各进口道的进入车流量,各出口的流量、路网的平均延误、平均停车延误、排队长度等。
4.2 获取宏观基本图
本文宏观基本图的获取是通过设置在路网中的数据采集点、车辆守恒方程,在某一时段进入车辆与离开路网的车辆之差,得出在这个时段车辆累积数。车流量的输入如图5所示。每600 s增加100辆,采用一个单峰的高峰期时段来模拟拥堵;设置8个不同的随机种子,对路网进行多次仿真,将数据汇总进行初步处理,得到路网累积车辆与离开路网车辆的关系图,如图6所示。

图5 车流量输入
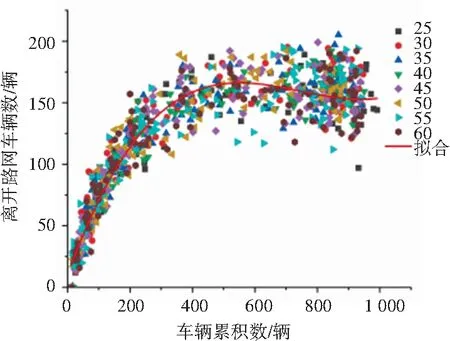
图6 路网累积车辆与离开路网车辆的关系图
图6中,横轴是每一时段的路网车辆累积总量,纵轴表示对车辆累积下离开路网的车辆数,可以看出在系统仿真的前期,由于路网中车辆较少,离开路网的车辆随着车辆数累积的增加而增加;当路网中车辆不断累积达到最佳累积值N*(t)时,对应离开路网的车辆数达到最大值,此时路网将会达到饱和状态;随着车辆不断进入路网,车辆累积数不断增加,离开路网的车辆数会有下降趋势,表明路网已经开始产生拥堵,处于过饱和状态。当路网的累积车辆在400左右时,会产生拥堵,此时的阈值可以暂定为边界控制阈值。
本研究考虑外围排队的边界控制,在路网即将要饱和状态时进行边界控制,实时动态的考虑内部车辆累计数与外部的排队车辆数,进而实时调整边界信号,形成一种协同边界信号控制,使得路网内车辆数始终处于最佳累积值,达到缓解交通拥堵,提高路网的通行能力的效果。
4.3 仿真结果分析
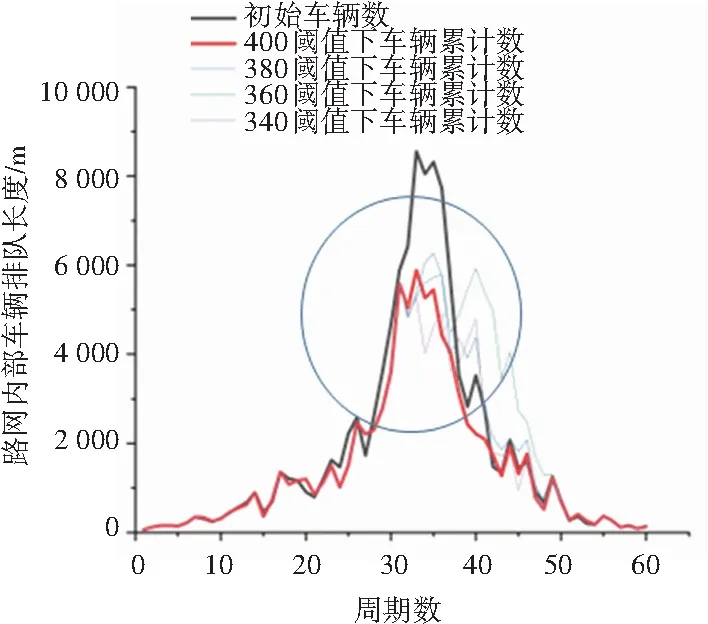
(a) 不同控制下排队长度
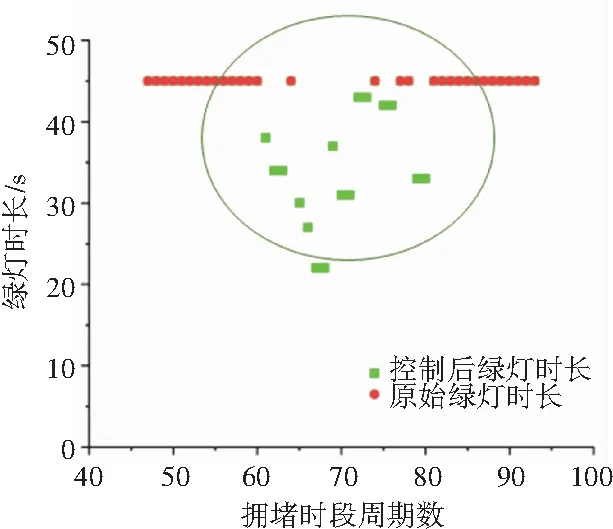
图8 绿灯改变时长
由图7可见,当阈值小于最佳阈值时,控制效果不明显,而阈值为最佳积累量时,对拥堵时段内进行控制效果明显。因此为了清晰对比,本文将阈值为400的结果与没有边界控制方案进行对比如图9所示,可见内部延误和排队长度均有所下降,整体的延误也没什么影响,反而得到一些改善,说明在拥堵时段考虑外围排队情况,可以有效缓解因边界控制导致的溢流现象。
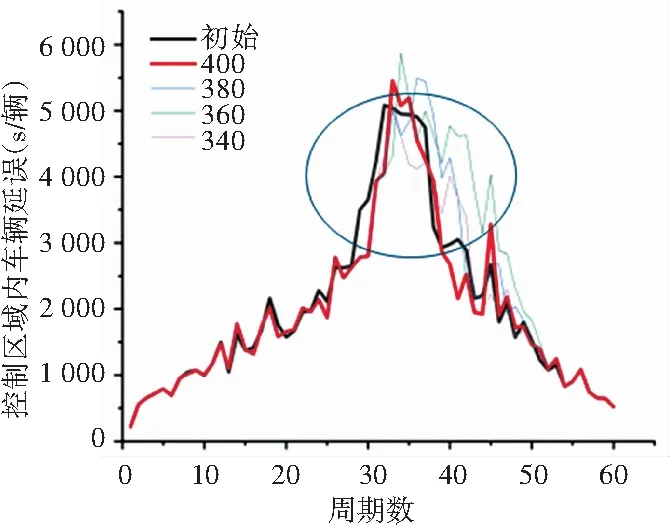
(a) 不同控制下车辆延误
通过对无边界控制和400阈值下的边界控制仿真后的数据进行汇总,分别取排队长度、车辆累积数、停车次数、整体延误的数据总和作为评价指标,见表1,可以看出没有边界控制时,路网的整体延误是1 197(s/辆),路网排队长度为3 661(m),总的车辆累积数为29 241辆,路网总的停车次数10 240 (次);边界控制后,各项路网运行指标得到改善,最终采用400的阈值进行控制,排队长度降低了20.0%,车辆累计数降低了4.1%,停车次数降低了3.4%,整体延误降低了2.4%。仿真结果表明,在选择正确的阈值下,采取边界控制同时考虑外围排队,使得路网性能的各项指标都得到改善,并且不会因控制路段上排队而影响整体的运行效率。

表1 控制策略实施前后的路网运行指标
5 结束语
本研究采用了宏观基本图理念结合边界控制思想,对发生拥堵的路网进行动态信号控制,建立了动态车辆平衡流方程,动态获取车流数据。通过仿真软件,对信号灯进行实时调节,以限制车辆进入拥堵区域,减少了路网内部车辆不断累计造成的排队、停车等,提高了路网在拥堵下的整体运行效率 。
