遗传算法优化模糊PID的管内液压校圆机构控制研究
2023-02-27宁志远
宁志远,赵 弘
(中国石油大学(北京) 机械与储运工程学院, 北京 102249)
0 引言
由于在管道的实际使用中需要将管道通过焊接工艺连接在一起,而焊接质量直接关系到施工以及后续投产使用的安全。影响焊接的一个关键因素就是管道的椭圆度,由美国制管协会制定的API Spec5L 标准,管件的椭圆度不得超过外径的1%[1]。管道在经过合理的校圆后会大幅度提高管道焊接的质量和焊接的效率,避免财力和人力的浪费。
目前,传统的校圆方法有扩径校圆[2]、外圆弧面校圆工装[3]、电磁冲模校圆[4]等工艺,但这些方法可以对管道的边缘进行校圆,不能对管道中间出现问题的部分进行修复,对管件整体校圆的技术较少且不完善。
目前在对于校圆装置控制方法以及算法上很少有系统深入的研究,而且部分校圆仍然采用人工校圆,导致校圆精度过低。优化后的模糊PID算法能够在线调整参数,使执行元件保持良好的动、静态稳定状态,相比于传统PID调整速度更快,校圆效率也大幅提升。因此,针对上述问题,设计一种适用于一定尺寸范围的管内校圆机构,能够实时检测管件的椭圆度,并对校正情况进行反馈,防止校正不足或校正过度,极大地提高了校圆精度和效率。
1 管内校圆机构整体结构设计
1.1 设计要求
椭圆度,又称不圆度或者失圆度,是指筒体在同一截面上存在最大直径与最小直径之差,即Dmax-Dmin[5]。本文设计的校圆机构可以在内径457~507 mm的管道工作,检验各处位置的椭圆度,将数据反馈给上位机,不达标部分对其进行校圆,直到检测达到要求。因此,该装置至少有校圆和检测两部分。校圆机构又可分为支撑、动力和执行机构3部分。其组成如图1所示。
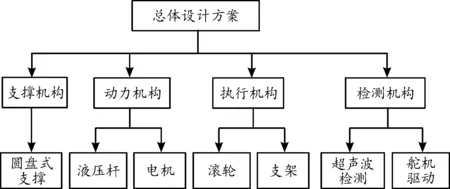
图1 校圆机构组成框图
动力机构为校圆的动作提供动力支持;执行机构与管道直接接触,校正管道;支撑机构处于装置的中心,起着支撑、定位的作用,在保证强度和安全的前提下,选择介于轴式和圆盘式之间的镂空圆盘作为支撑结构[6];检测机构负责检测管道椭圆度,反馈给上位机进行下一步操作。三维模型如图2所示。
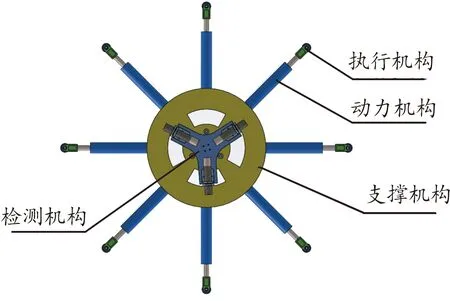
图2 校圆装置三维模型示意图
1.2 液压系统设计
图3为多缸校圆液压系统设计原理示意图,由于实现高精度校圆需要多个液压杆,而且多个液压杆可以由一个液压泵分别控制,就能实现各个缸体的独立运动,因此,采用液压杆作为动力元件实现灵活、精准的校圆工作。选择系统的工作压力为2 MPa,液压杆的工作面积为Ap=28.5 cm2,液压杆所需最大流量为qmax=7.57 cm3/s,液压杆的缸径为D=5 cm。
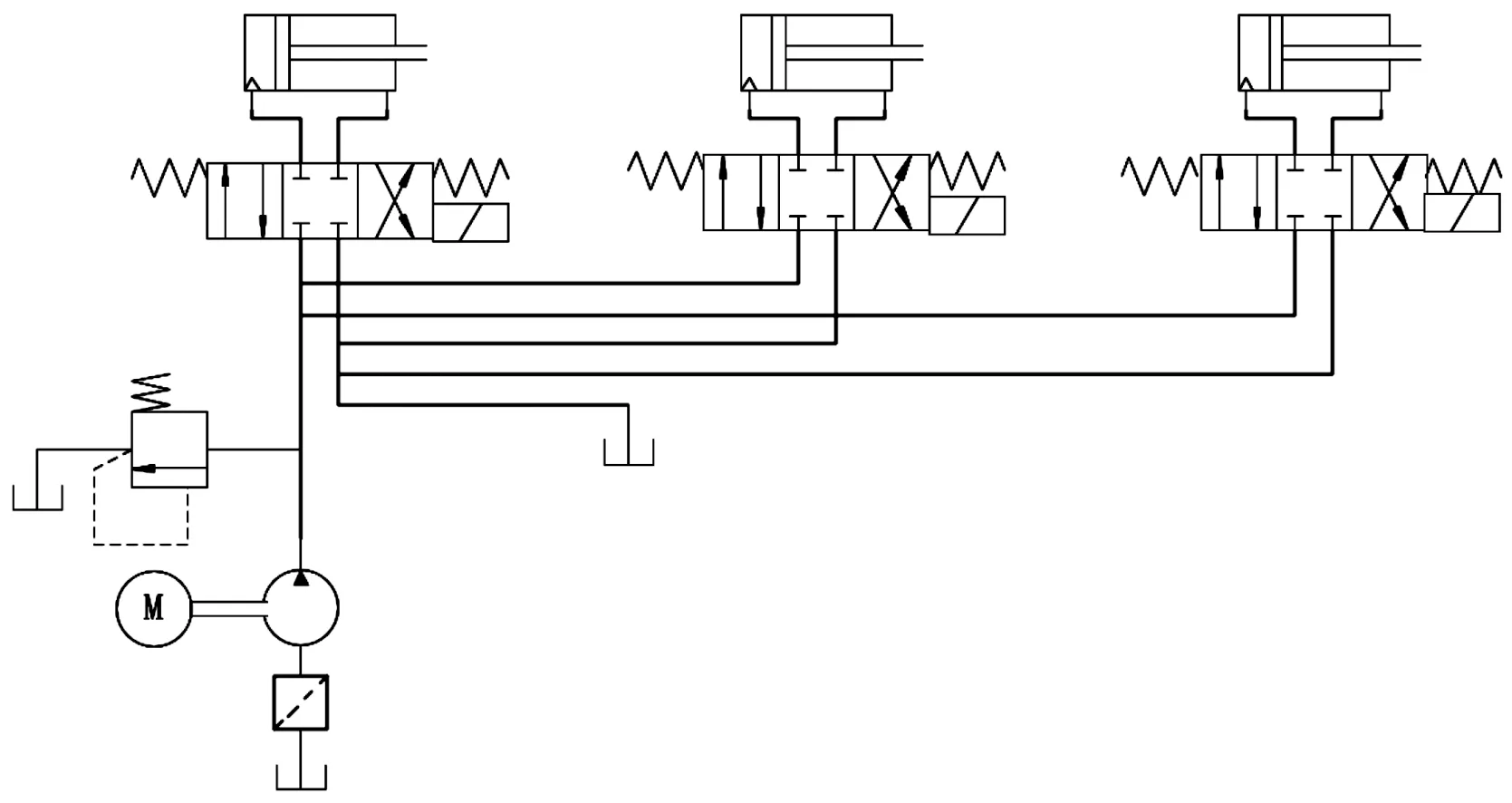
图3 多缸校圆液压系统设计原理示意图
1.3 执行机构设计
执行机构通过与液压杆上的螺纹连接固定在液压杆上,在校圆过程中,摩擦力很大。如果经过长时间的工作后,很有可能管道内壁被磨损,造成不必要的损失。最终选择了部分圆弧式接触,并且在此基础上加以改进,将头部改为滚轮,变滑动为滚动,将摩擦力的作用消除。
1.4 检测机构设计
检测装置需要实时检测同一截面的椭圆度,并且将校正部分椭圆度数据及时传输给上位机,以防校正过度。由于单个传感器不能满足精度要求,选择3个相同型号的超声波传感器[7]各自间隔120°均匀分布,并且3个传感器需要固定在半径相同的圆周上,这样在检测时,测量的距离才是准确的。
校圆机构工作时,首先通过超声波实时监测管道的椭圆度,如若有椭圆度不符合要求部分,将具体位置数据传输给上位机,如果校圆部分通过旋转将滚轮与校正部分径向平行,管道整体椭圆度均不达标,则需要多个液压杆同时运动,在校圆同时继续检测椭圆度,实时反馈直至符合要求。
2 校圆机构液压控制系统的分析及控制
2.1 校圆机构液压系统数学模型的建立
在建模过程中,假设液压油的体积弹性模量和油温为定值,不随工作环境变化[8-9]。校圆机构是一个典型的电液位置控制系统。它的输入量是电信号Ui,输出量是液压缸的位移xp。该系统的工作原理可用图4描述。
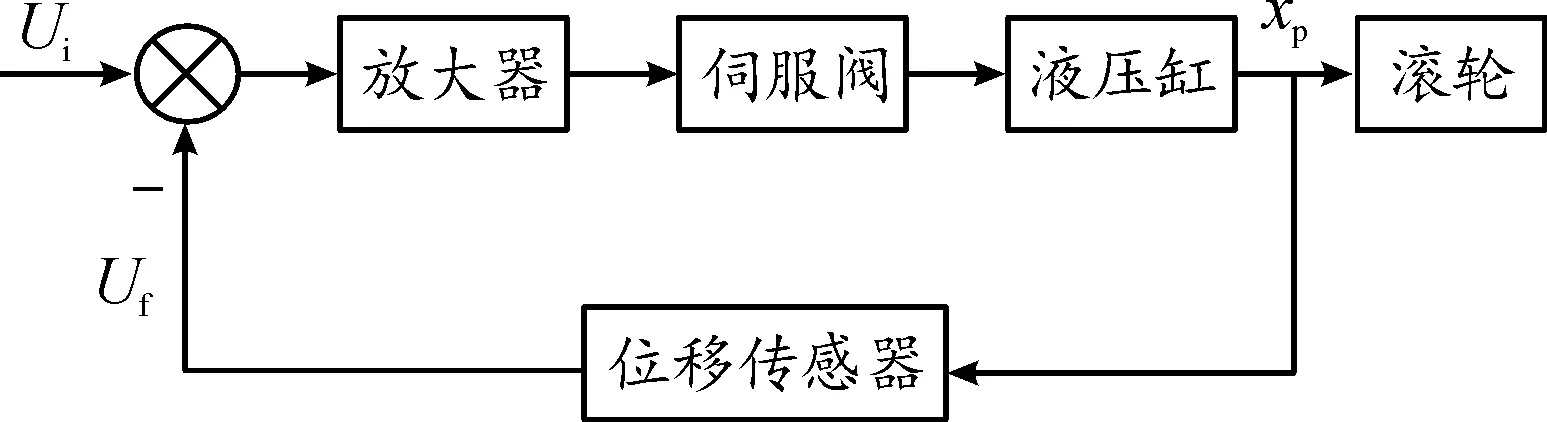
图4 电液位置控制系统工作原理示意图
为了提高同步控制精度,选择误差补偿法实现同步控制,该方法在“串联式”与“并联式”的基础上,将液压杆1与液压缸2的输出位移作差,将得到的误差作为补偿输入给输出反应速度慢的液压杆2,从而提高响应速度。相比于“串联式”和“并联式”,该方法能够使同步最大误差分别减少96.39%和69.94%。图5为误差补偿法原理框图[10]。
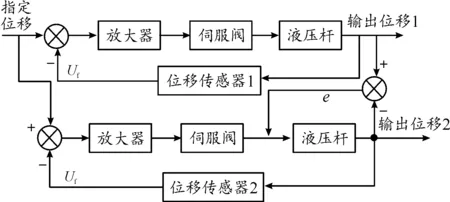
图5 误差补偿法同步控制结构框图
建立液压动力元件的流量方程、连续性方程以及平衡方程[11],并进行拉普拉斯变换:
(1)
式中:Ap为液压缸有效面积;pL为负载压力;m为负载等效质量;βe为液体的体积弹性模数;Ks为负载弹性刚度;FL为液压缸负载力;xp为液压缸缸体位移;Ct为液压缸的泄露系数;Vt为液压缸总体积;Kq为阀流量增益;Kc为阀压力流量系数;xv为阀芯位移。
电液伺服阀的传递函数近似为惯性环节:
(2)
式中:Tv为阀的时间常数;Kv为伺服阀增益。
根据式(1)和式(2)可作出位置控制系统框图,如图6所示。
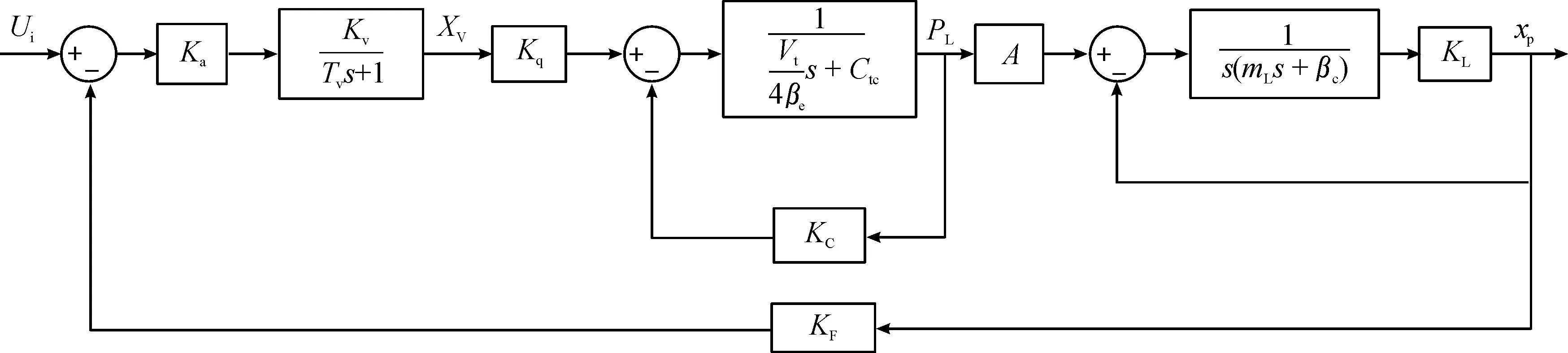
图6 位置控制系统框图
进而可以得到该系统的开环传递函数:
(3)
通过计算后,确定活塞有效面积、系统开环增益。其中Vt=627 cm3,Tv=0.005 3,βc=0.8 N·m/s,βe=70 000 N/cm2,Kv=25 L/s。将其代入式(3)进行计算,可以得到系统的开环传递函数:
(4)
2.2 动态特性分析
系统的开环波德图如图7所示,幅值裕度GM=58.7 dB,相位裕度PM=123°,该系统稳定。加入PID校正,通过PID模块Tune得到Kp=0.96、Ki=0.22、Kd=-0.107。系统响应结果如图8所示。可以看出,通过普通PID的校正,系统虽然稳定,但是响应时间过长,超调量过大,并且稳态精度也比较低,因此需要对该系统进行改进。
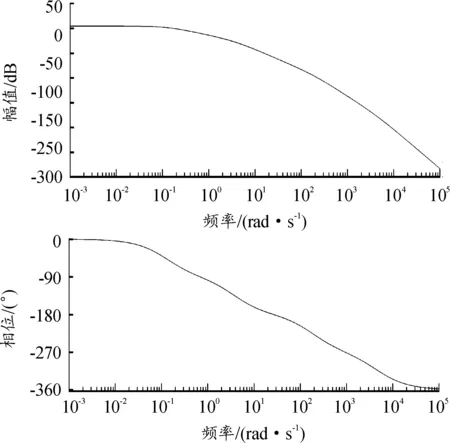
图7 开环波德图
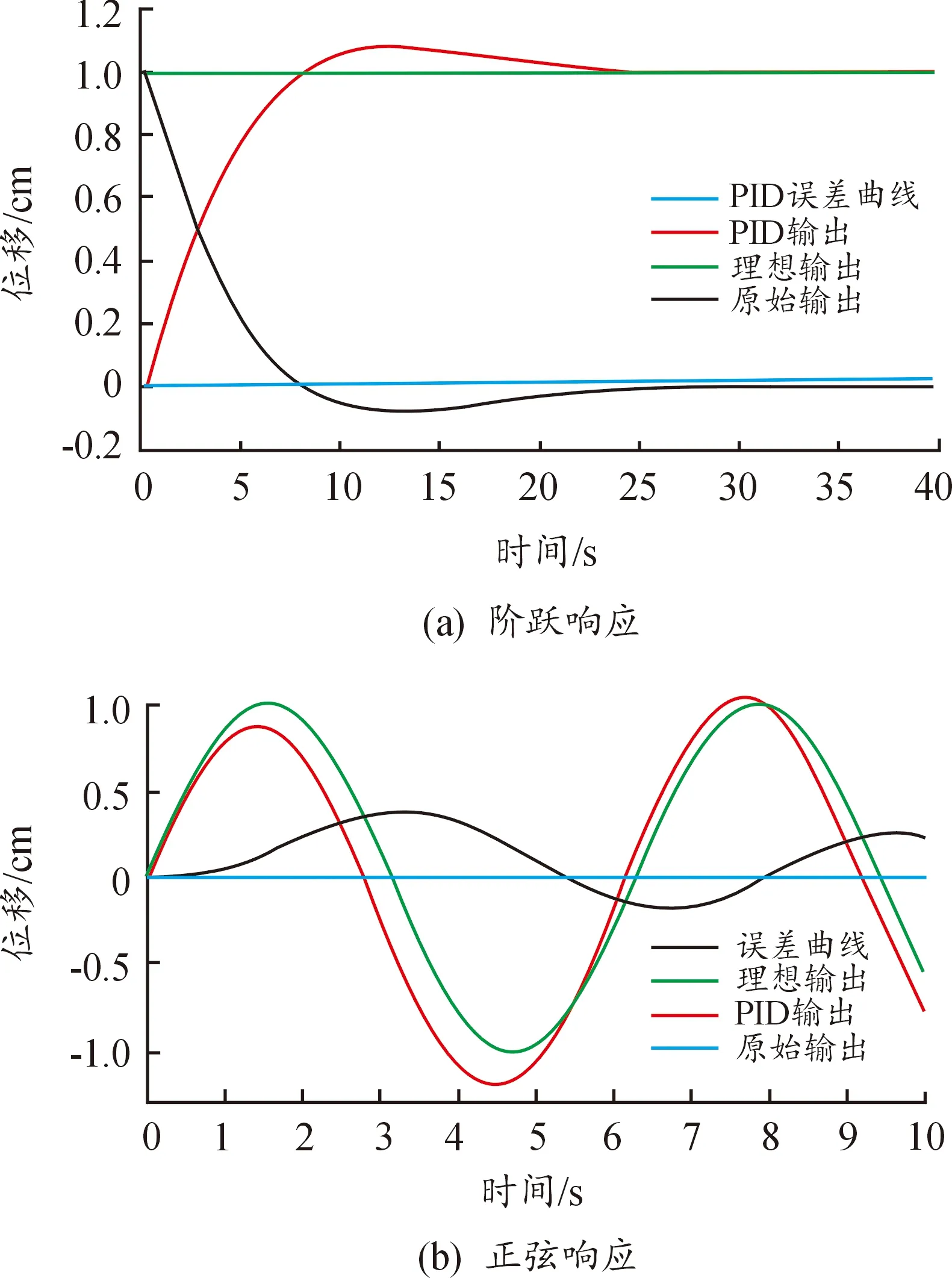
图8 普通PID响应结果曲线
3 遗传算法优化模糊PID控制器设计
模糊控制由模糊化、模糊推理、清晰化3个部分组成。模糊PID是在普通PID的基础上实时优化控制器的3个参数Kp、Ki、Kd。PID控制器参数自整定公式为[12]:
(5)
式中:Kp(0)、Ki(0)、Kd(0)为PID控制器参数初值;ΔKp、ΔKi、ΔKd为Kp、Ki、Kd的调整值。
校圆液压控制系统的框图如图9所示,该系统的模糊控制器设置为两输入三输出结构,将误差e和误差变化率ec作为输入,输出为PID的3个参数,在运行中不断检测e和ec,根据预设的模糊规则对3个参数进行在线调整,以满足不同的e和ec对3个参数的不同要求。
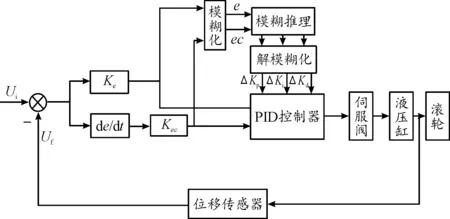
图9 模糊PID控制系统框图
3.1 确立隶属函数
由于高斯隶属函数不能指定非对称的隶属函数,所以采用三角隶属函数。将e和ec分为7个模糊状态。模糊论域为[-3 -2 -1 0 1 2 3],相对应的模糊集为{负大(NB),负中(NM),负小 (NS),零(ZE),正小(PS),正中(PM),正大(PB)}。图10为模糊控制的隶属函数曲线。
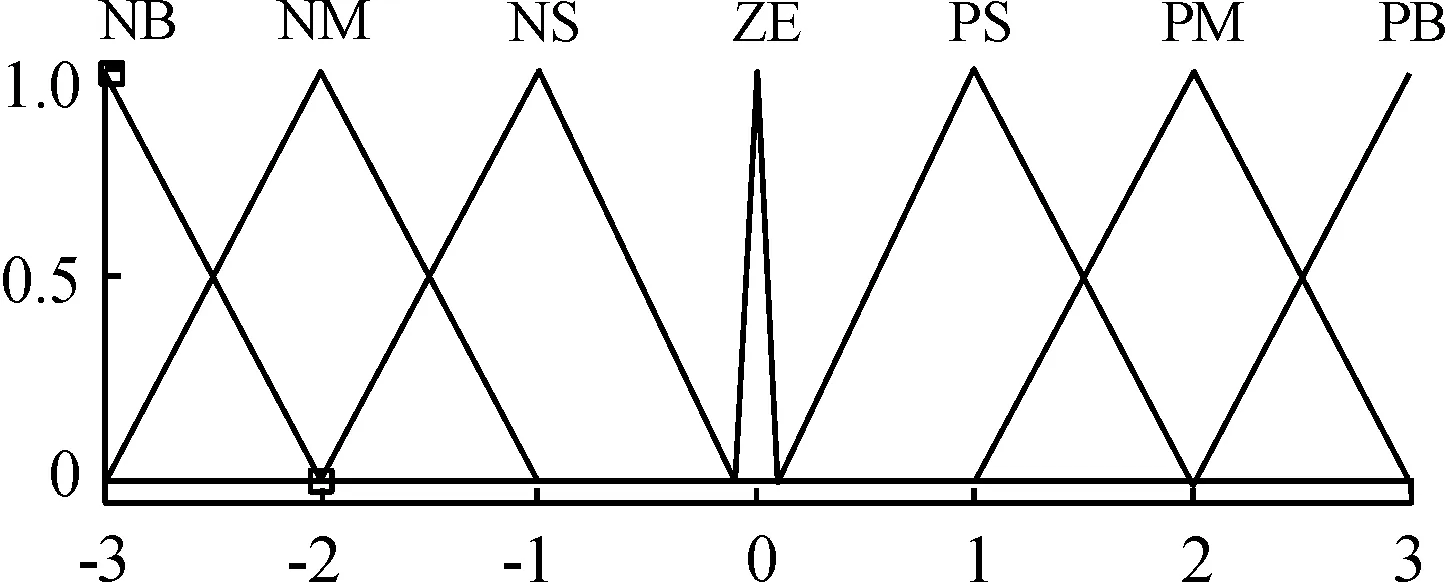
图10 模糊PID控制器隶属函数曲线
3.2 设计模糊规则
该系统的模糊控制器设置为两输入三输出结构,PID控制器的控制算式[13]为:

(6)
根据3个参数对响应结果的不同影响,设定了规则[14]。根据资料和总结经验设定了Kp、Ki、Kd对应的模糊规则,如表1所示。
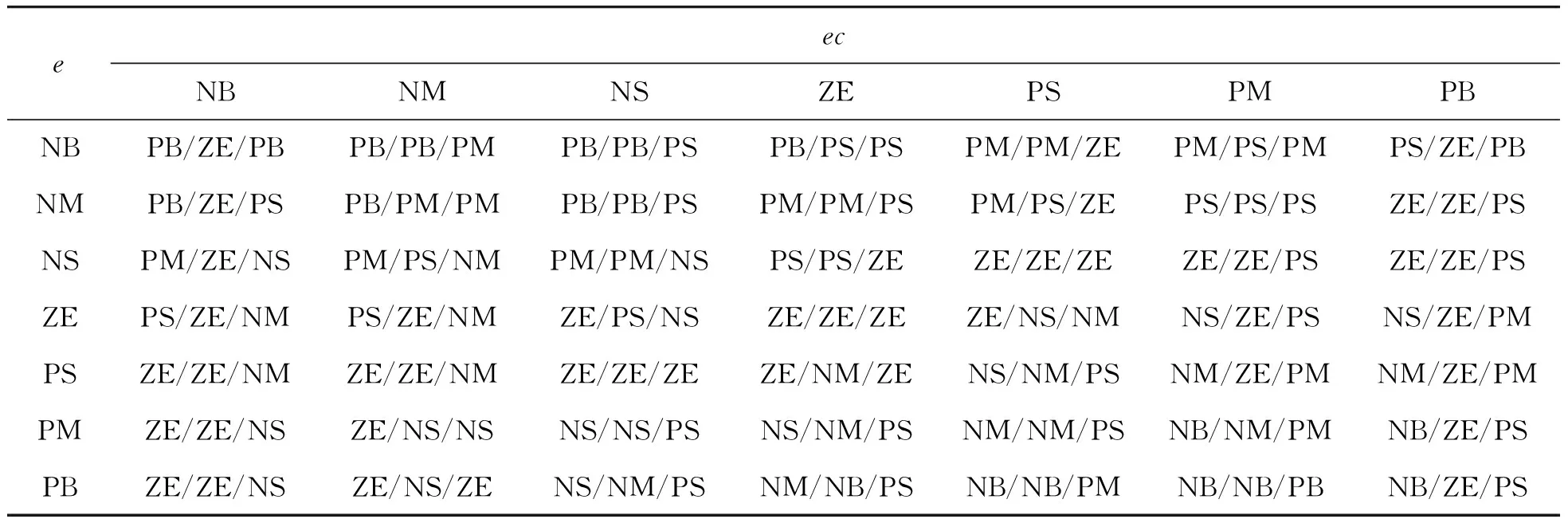
表1 模糊规则控制
3.3 遗传算法优化模糊规则
上述模糊PID控制响应时间快,消除稳态偏差,但仍然具有一定的超调量,采用经验法选取模糊控制规则具有一定的局限性。遗传算法属于智能优化算法,它采纳自然进化的模型,属于全局优化搜索的方法。
遗传算法(GA)是借鉴生物进化的理论,是群体寻优的算法。随机多个产生实际问题的可行解(种群),对种群进行编码操作,将可行解转化染色体的形式。根据目标函数构造适值函数,对种群进行评估,遗传运算(交叉、变异、反转),选择,经多代更替,获得适应度较好的个体,作为全局最优解。将遗传算法与模糊控制器相结合,可以对模糊控制规则进行全局寻优,摆脱模糊控制的规则不受人为经验的限制。遗传算法流程如图11所示。
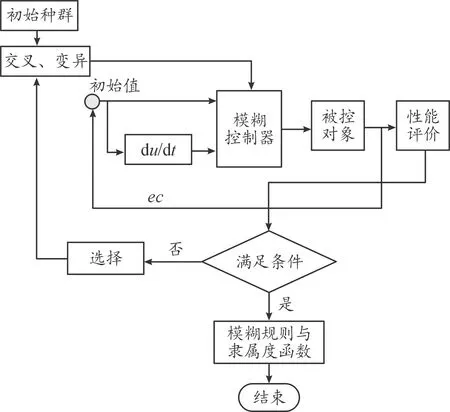
图11 遗传算法优化模糊PID原理框图
3.3.1确定编码规则方法
由于二进制编码有较强的搜索能力,故对模糊规则进行二进制编码。用三位二进制对模糊子集编码,将{NB,NM,NS,ZE,PS,PM,PB}编码为{000,001,010,011,100,101,110}。该模糊规则模糊子集为7级,共49条控制规则需要改进。
3.3.2适应度函数
选择ITAE作为误差性能指标,能够快速评判系统的快速性和准确性,将该指标应用于PID控制,能够最大程度地缩短响应时间。定义为:

(7)
3.3.3交叉、变异参数设置
交叉采用凸组合交叉,亲代样本[14]为:
(8)
交叉后:
(9)
变异时,随机对第i个个体,第j个基因进行变异,运算[15]为:
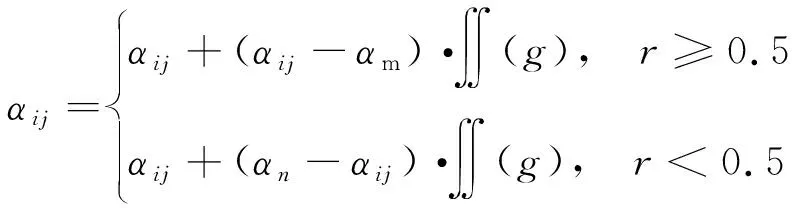
(9)
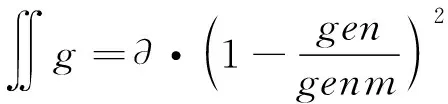
(10)
设置最大终止条件为200代,种群规模为100,交叉后代概率为0.75,个体基因突变产生的概率Pm=0.02。
3.4 模糊推理及去模糊化
对采集到的e和ec,需要找到它们的隶属度,进而推出3个输出对应的隶属度。选用Mamdani模糊推理法[16],通过隶属度函数与模糊规则,得到双输入,分别映射到三输出,得模糊关系:
(11)
确定了模糊关系后,最终通过Mamdani模糊推理法得到输入与输出的对应关系:
(12)
式中:∘ 为模糊关系合成符号。
采用重心法去模糊化,使用该方法得到的输出隶属度函数的计算结果比较准确,可以得到准确的控制量[17]。重心法表达式如下:
(13)
4 仿真调试及结果对比分析
4.1 模糊PID控制系统仿真模型的建立
利用Matlab/Simulink中的遗传算法和模糊控制工具箱,将模糊规则优化后,分别建立单液压杆和多液压杆同步动态仿真模型,由于篇幅限制和液压杆控制的相似性,用两杆同步控制代替多杆同步控制,如图12、13所示。
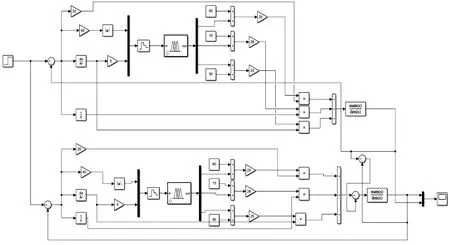
图13 多杆仿真框图
4.2 仿真结果分析及对比
在对仿真模型中的参数不断调试后,得到模糊控制的最佳效果,响应结果和误差曲线如图14。可以看到,通过GA优化后的模糊PID控制后响应时间为0.6 s左右,相对误差在0.1%~0.2%,效果非常理想。
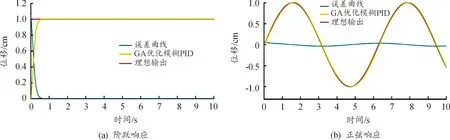
图14 模糊PID响应结果曲线
图15为单杆GA优化后PID与模糊PID响应结果。可以看到,GA模糊PID的响应时间为0.6 s,相比普通模糊PID提高了30倍左右,并且超调量几乎为0,普通PID控制误差较大,跟踪性能不好,响应时间过长。遗传模糊自适应控制克服了普通PID的缺点,大幅度提升了系统的稳定性和效率。
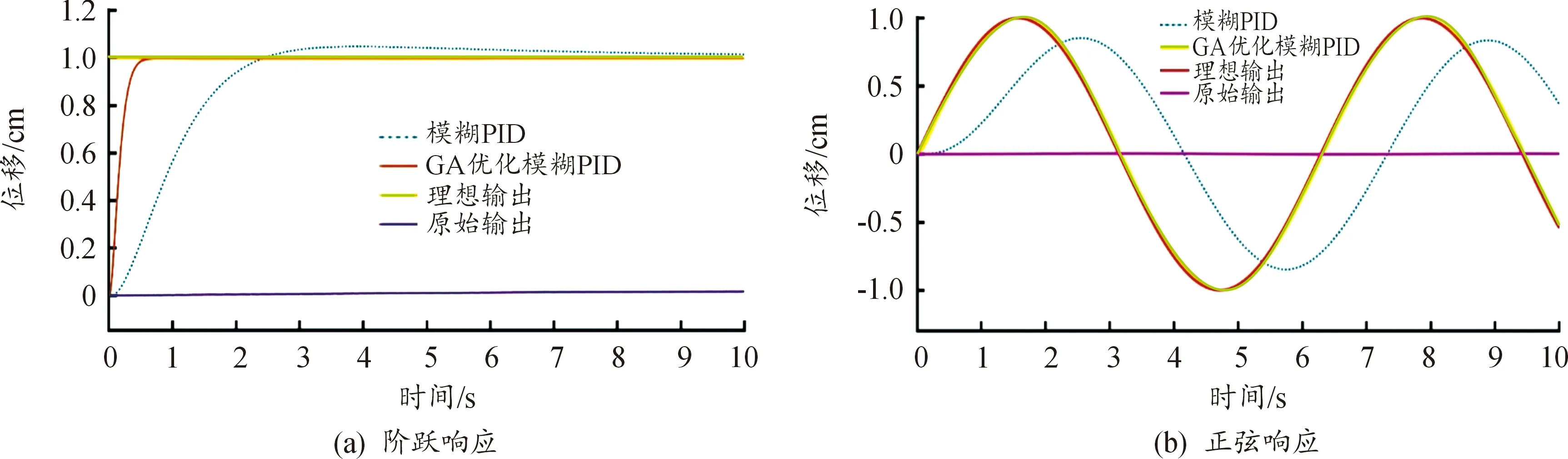
图15 不同控制器响应结果曲线
对于双杆同步控制模型,输入阶跃信号得到响应曲线及同步误差曲线,如图16、17所示。可以看到,两杆在0.3 s左右同时达到稳态,二者的误差值约为0.1。响应速度及控制精度在允许范围之内。
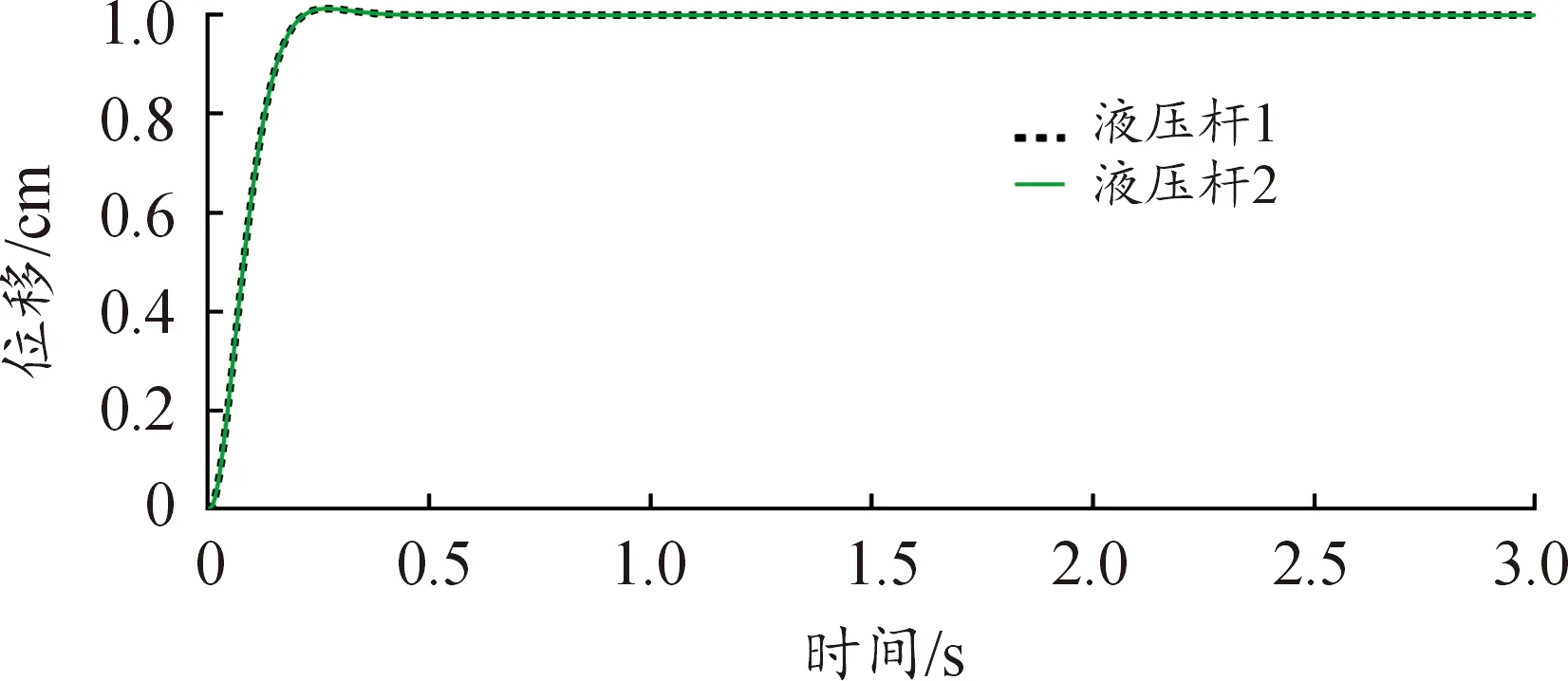
图16 误差补偿控制阶跃响应曲线
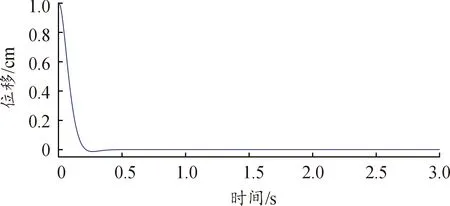
图17 误差补偿控制误差曲线
5 结论
1)设计了一种新型校圆机构,采用集成式设计,能适用于不同直径的管件,能检测任意位置的椭圆度。
2)对液压系统进行设计及控制,并且采用GA优化模糊PID控制。仿真结果表明:响应时间提高到0.6 s,相对误差在0.1%~0.2%,多杆同步控制稳态误差为0.1,0.3 s达到稳态。该机构具有良好的动态性能,精度满足工程需要。