基于Ransac算法的多波束点云人工鱼礁提取方法
2023-02-25廖德亮卢泉水杨智松崔晓冬
沈 蔚,廖德亮,卢泉水 ,杨智松,崔晓冬,林 军
(1 上海海洋大学海洋科学学院,上海 201306;2 上海河口海洋测绘工程技术研究中心,上海 201306;3 上海海洋大学海洋生态与环境学院,上海,201306;4 上海海洋大学海洋牧场工程技术研究中心,上海,201306 )
近年来,世界各国保护和改善海洋生态环境的意识不断提高,以投放人工鱼礁为主要工作的海洋牧场建设,已被证实是一种对近海海洋生物栖息地和渔场进行修复的可靠手段,并得到大规模的开展[1-2]。投放人工鱼礁作为中国海洋牧场建设的一个重要环节,其投放效果很大程度上决定了海洋牧场建设的成败,对其进行有效的评估已逐步成为海洋牧场建设基本要求之一。利用声学探测手段如侧扫声呐、多波束测深、识别声呐等手段,相较于传统的潜水摄像和人工探摸,可更加高效和准确地评价人工鱼礁的投放效果[3-6]。
实际工作中,利用侧扫声呐探测获得的人工鱼礁二维图像变形较大,且无法获得鱼礁的高度和内部结构等三维信息,对大量单体鱼礁堆砌而成的礁群三维信息更是难以获取[7]。因此,利用声呐三维数据进行水下鱼礁等目标的识别提取,已成为研究热点。Sung等[7]提出了一种基于声呐水下点云的目标分类方法,通过神经网络来重建物体的三维形状。 Kim等[8]提出了一种多向扫描策略来改善水下点云和重建结果,还利用了实时三维重建的多边形近似方法来处理三维点云数据。Spears等[9]利用了声呐采集了极地冰下的多波束点云数据并进行了地形重建。Menna等[10]利用联合测量的方式来获取水上水下物体的三维点云并进行了建模,实现了激光点云和声呐点云的高效组合。赵刚等[11]使用曲率压缩和Delaunay三角网方法对水下抛石护岸工程进行了三维水下地形重建。上海海洋大学首次将C3D侧扫声呐系统应用于人工鱼礁探测,并进行了人工鱼礁自动识别方法的研究,取得了较好的成效[12]。冯东恒等[13]提出了一种顾及水下地形特点的多波束点云去噪算法,实现了水下地形和非地形点的有效分离。刘哲等[14]采用多波束点云对海底管道进行了定位检测和三维点云重建。
针对多波束声呐采集的人工鱼礁三维点云数据,在多步预处理后,采用随机抽样一致算法(random sample consensus,RANSAC)实现海底平面拟合,通过分离人工鱼礁和海底平面来实现人工鱼礁的识别与提取,从而为下一步的人工鱼礁投放效果的量化评估提供三维数据。
1 多波束点云数据
1.1 点云数据的获取
试验区多波束点云如图1所示。
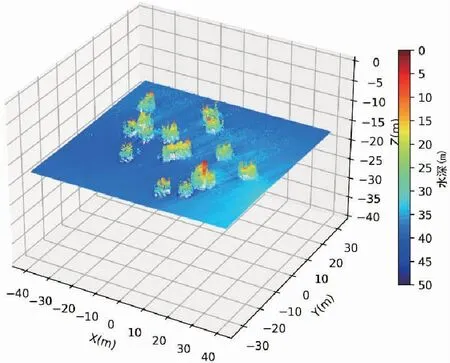
图1 试验区多波束点云图(局部)
多波束声呐由其换能器阵向水下发射整体呈扇形的窄波束,基于每个波束的角度和斜距计算波束脚点的三维坐标,随着船只的移动获得条带状的三维点云数据[15]。多波束声呐,每秒可发射30~50次,每次发射能采集数百到上千个波束脚印的坐标,可快速和准确地绘制海底地形地貌图。每条多波束数据经过吃水、潮位、声速改正和姿态校正等一系处理之后,通常导出为条带状的三维点云。每个条带的点云数据,经镶嵌拼接后成为一个密集的面状点云,可直观地表达海底的三维地形。
1.2 点云数据预处理
多波束声呐采集的数据由于风浪和洋流的影响难免出现大量的噪声[16-18],这也是多波束点云区别于陆地激光点云的一个重要特点。因此,对原始点云数据需进行滤波处理,尽量剔除各类噪声数据,保留水下地形和目标数据,点云滤波流程如图2所示。

图2 高质量多波束点云获取流程图
为了提人工高鱼礁识别的成功率,首先要对多波束点云进行分割,依据地形特征变化的幅度,将岸边不平坦的非鱼礁区分割裁剪掉。
点云滤波可分为人工交互滤波和自动滤波两类。多波束声呐采集的点云,每分钟可多达百万个,数据量极其庞大,传统的人工交互滤波,工作效率非常低,急需利用自动滤波软件算法开展滤波工作。多波束点云中噪声点通常与地形点之间的距离较大,而水下地形点和鱼礁点云较为集中临近[19-20]。因此,通过设置相应的近邻点距离和数量阈值,可以实现多波束点云噪声的自动剔除[21-22]。半径滤波算法,通过设定半径阈值r来划分圆,并设定圆内的点数量阈值n,再计算该半径r内的临近点数量N,由此可判断:

(1)
式中:noise为噪声点,non-noise为非噪声点。即当在半径为r的圆中临近点数量N小于等于设定阈值时,认为其是噪声点,否则为非噪声点。
2 Ransac算法构建
2.1 Ransac算法原理
Ransac算法(Random Sample Consensus,Ransac)可以从包括异常值在内的一组数据中估计出最优的数学模型,因此被广泛用于直线拟合和平面拟合[23-24]。 Ransac 算法假设数据包含正确和异常数据(或称噪声)。正确数据记录为内点(inliers),异常数据记录为外点(outliers)。该算法的中心思想是随机性和假设性。随机性是根据正确数据出现的概率随机选择抽样数据,根据大数定律,随机性模拟可以近似获得正确的结果。假设性是假设所有选择的样本数据都是正确的,通过使用正确数据中满足问题的模型,计算其他点,然后比较结果,重复迭代,直至获得最佳的模型。
2.2 基于RANSAC算法的海底面拟合
人工鱼礁的选址非常重要,鱼礁投放的海底要求宽阔平坦,起伏小,以硬质海底为好[25-29]。数量庞大且集中的非噪声海底点云,适合利用Ransac算法拟合为一个近似平面。
人工鱼礁提取算法流程如图3所示。
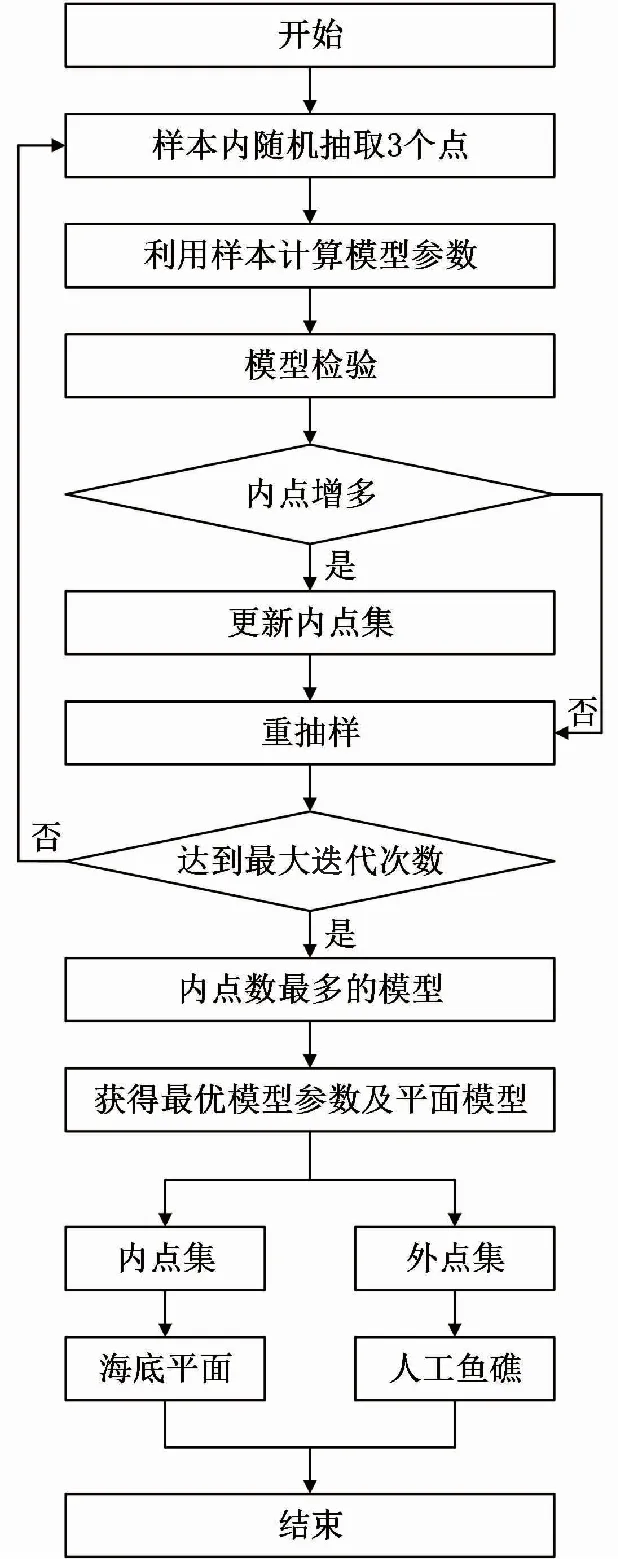
图3 人工鱼礁提取算法流程图
海底面点云拟合的基本流程如下:
(1)首先从给定的点云数据中随机抽取三个点,从而生成一个平面方程Ax+By+Cz+D=0,其中A、B、C、D为模型参数。
(2)将该初步拟合方程作用于所有数据,计算各点到平面之间的距离Di,随后设置阈值D,如果Di≤D,则记为内点(inliers),否则记为外点(outliers),并设置内点率为P,记录内点个数pinliers和外点个数poutliers。
(3)以上整个过程每迭代一次,就有两个结果:内点数量少于原有模型,舍弃;内点数量大于现有模型,新模型被选用。
(4)重复上述操作,获得内点数目最多的模型,以确定最优的A、B、C、D参数,从而找到最优的拟合平面。
获得最优地形平面后,内点集即为海底地形点,外点集即为人工鱼礁点,整个算法流程如图3所示。
2.3 算法参数分析
算法中含有3个阈值参数距离阈值D、迭代次数N、内点率P,参数设置如下:
(1)距离阈值D,该参数主要依据实际测量过程中的经验进行选择,本次试验距离阈值设置为0.5 m。基于下式判断是否为内点:
(2)
(2)迭代次数N,随机选取K(K≥3)个点,这K个点都是内点的概率为PK(P为内点所占的概率),那么这K个点中至少有一个为外点的概率为1-PK,N次迭代,每次迭代的都存在外点的概率为(1-PK)N,则至少有一次选择到内点的概率为1-(1-PK)N,此概率通常要大于或者等于q(q为随机选取非噪声点的概率,通常为99%),由此可得:
1-(1-PK)N≥q
(3)
1-q≥(1-PK)N
(4)
两边取对数得:
ln (1-q)≥N·ln (1-PK)
两边同时除以ln (1-PK)得:
得到迭代次数N。
(3)内点率P,内点个数占总点数的比例即为内点率,可由如下公式计算:
(5)
反之设外点率为PO,由上式可得:
PO=1-P
(6)
式中:inliers为内点,outliers为外点,Di表示各点到平面之间的距离,m;D为距离阈值;N为迭代次数,次;P为内点率,%;q为随机选取非噪声点的概率(≥99%);K表示随机选取的点数;pinliers和poutliers分别表示内点个数(个)和外点个数(个);PO为外点率,%。
3 人工鱼礁提取实例
3.1 试验数据获取
人工鱼礁群三维结构如图4所示。
本试验区为浙江嵊泗马鞍列岛附近某人工鱼礁区,2017年共计投放11座礁群。其中主体为8座礁群,每个由25个双层十字形鱼礁组成(规格如图4a),另有3座沿岸礁群,每个由25个单层十字鱼礁组成(规格如图4b)。
2021年7月开展了鱼礁区现场测量,采用挪威出品的Norbit WBMS多波束系统,对礁区进行了全覆盖测量,所测20个条带数据之间有一定重叠,衔接完整。通过加拿大出品的CARIS处理分析软件,对试验区多波束原始数据进行了一系列处理,生成海底三维点云。
研究区三维海底地形(框内为人工鱼礁群)如图5所示,其中投放的人工鱼礁群清晰可见。
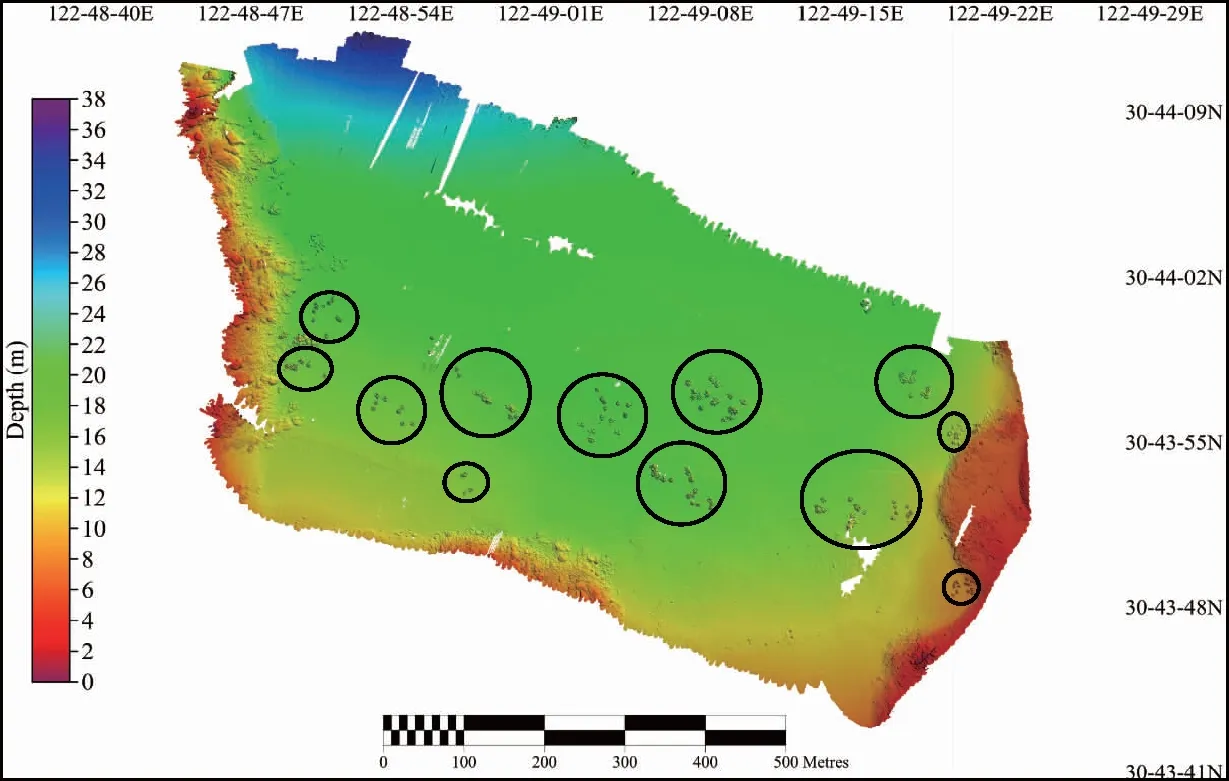
图5 研究区三维海底地形(框内为人工鱼礁群)
如图5所示,本试验多波束采集原始水深点共计302 216个,平均水深约17.3 m。原始点云数据中噪声较多,主要集中在测量条带的边缘和岸边地形剧烈变化的岸边。本试验,首先将靠近岸边地形起伏剧烈的区域与平坦的鱼礁区进行分割,以便下一步鱼礁提取工作。
3.2 提取人工鱼礁
3.2.1 整体鱼礁提取
基于RANSAC算法对海底面的拟合,得到了最优内点集构成的海底面,同时得到的外点集即为人工鱼礁点云,进而实现了人工鱼礁的提取,人工鱼礁提取效果如图6所示。
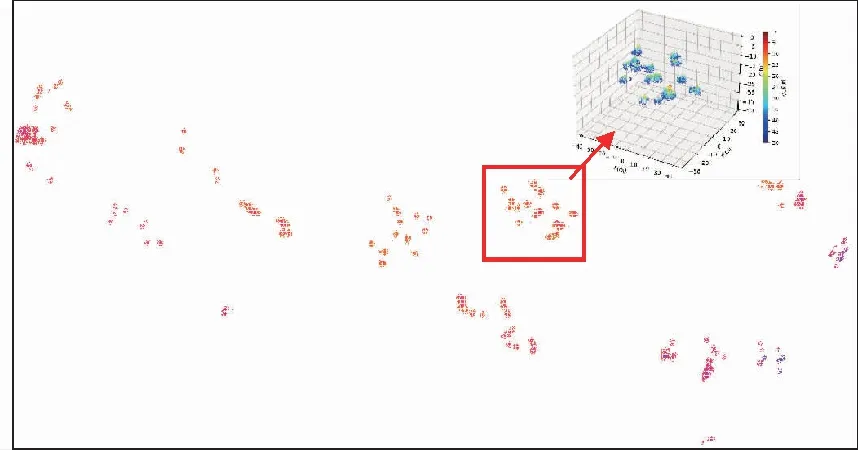
图6 人工鱼礁提取效果图
图1为试验区海底局部三维点云,图7为其人工鱼礁与海底面分离后,保留的人工鱼礁点云。试验结果表明,分离效果良好,但仍存在少量未分离的海底点。
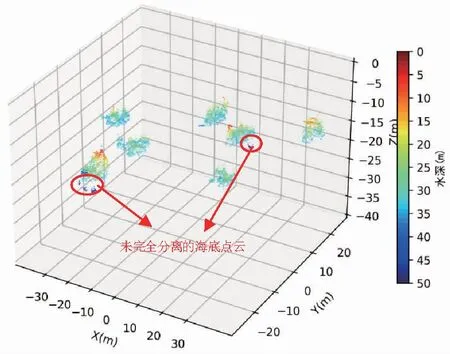
图7 点云分离效果图
3.2.2 单体鱼礁提取
人工鱼礁内部结构复杂,礁体空隙多,单体鱼礁的三维形态特征是判断鱼礁投放效果的重要指标之一。本试验提取的人工鱼礁点云,如图8所示,效果良好,可以用于单体鱼礁的评估。
图8a中绿色点云为鱼礁点云,蓝色部分为海底点云,分离后的单体人工鱼礁点云如图8b。经测量,本方法提取的单体、双体十字形鱼礁尺寸与实际尺寸一致,形状轮廓与真实鱼礁重合度较高,如图8c所示,可较好地表达鱼礁的三维形态和内部结构,这是当前其他探测手段难以实现的。本方法对于其他形状的人工鱼礁,如回字形、方形、三角形鱼礁,只需设置适合的距离阈值即可实现其自动提取,适用性很高。

图8 单体鱼礁点云分离效果图
3.3 提取精度分析
本研究以专家目视解译识别到的鱼礁为参考值,与Ransac算法自动提取到的人工鱼礁结果进行比对,开展试验精度评价工作。采用目标识别的正确度和完整度指标[30-31],对鱼礁提取的结果进行定量评价,设TP为正确检测的样本鱼礁数量,FN表示未识别的鱼礁,FP为误检的鱼礁数量,AC为人工鱼礁识别的正确度,IN为人工鱼礁识别的完整度,公式如下。
(7)
(8)
试验数据中,目视解译人工鱼礁数量为98个,自动识别的TP为91个、FP为5个、FN为9个,计算得到AC为94.79%,IN为91%。
试验结果表明,总体识别效果良好,点云形态完整,但仍存在几个问题:提取的鱼礁之中仍有少量海底点,并未完全分离;两个单体鱼礁距离太近被识别为一个鱼礁;将其他目标识别为人工鱼礁。
4 总结与展望
本研究设计的Ransac算法拟合海底面来分离人工鱼礁与海底,经试验证明,方法操作简便,可靠性较高,可以高效高精度地自动识别和提取人工鱼礁。本方法对于整体和单体人工鱼礁都具有较好的识别效果,鱼礁识别正确率较高,鱼礁提取的三维形态较为完整,研究方法和成果可以用于鱼礁的量化评估,具备大规模推广应用的能力。目前方法仍存在不足,存在多个临近鱼礁群被识别为一个鱼礁,以及鱼礁点云包含少量海底点的问题,后续研究中,将进一步改进算法,不断提高鱼礁识别准确度。人工鱼礁探测与评估,正从人工探摸手段逐步过渡到声学探测手段为主,目前广泛采用的二维声呐图像识别的方法,仅能提取鱼礁的位置和范围,而三维声呐点云的识别方法可以准确地提取鱼礁的位置、形状、高度、空方等信息,更加全面准确,有望成为未来鱼礁检测评估的标准手段。
□
