基于状态输出反馈自适应模糊控制的导弹控制系统设计
2023-02-24黄睿涵段朝阳李海峰
黄睿涵, 段朝阳, 李海峰
(1.中国空空导弹研究院, 河南 洛阳 471009; 2.空基信息感知与融合全国重点实验室, 河南 洛阳 471009)
0 引 言
随着科学技术的不断进步以及空战需求的不断提升, 各类空战武器都朝着高空、 高速、 高隐身、 大机动的目标发展, 因此对于空空导弹的战斗性能也有了更高的要求[1-2]。 为了解决传统气动舵控制的空空导弹在低动压下机动能力差的问题, 采用直接力/气动力复合控制的方式来提高空空导弹的响应速度, 使其能够更精准地命中目标[3]。
对于直接力/气动力复合控制系统来说, 传统PID控制方法难以满足控制系统对于导弹性能的要求[4], 因此学者开展了新控制方法的研究, 包括最优控制、 模糊控制、 滑模控制以及自抗扰控制。 文献[5]针对空空导弹在转弯过程中的大攻角姿态控制问题, 设计了大扰动下的混合Bang-Bang控制律, 并利用扩张状态观测器来修正切换线, 提高鲁棒性; 文献[6]提出抛接定向越肩发射转弯方案, 以提高空空导弹在使用直接力装置时的转弯能力, 并在相平面内设计了具有离散特性的混合Bang-Bang控制系统, 该方案可使导弹转弯时间缩短、 能量消耗降低且转弯半径减小; 文献[7]建立了基于模糊控制的直接力/气动力复合控制系统, 并使用神经网络建立了神经模糊推理系统, 以解决模糊控制过于依赖经验的问题; 文献[8]针对直接力/气动力复合控制问题, 使用滑模控制设计了气动子系统, 以提高其鲁棒性, 又利用模糊规则设计了直接力子系统, 使导弹整体性能得到了提高; 文献[9]通过使用非奇异快速终端滑模方法和动态分配技术改善直接力/气动力复合空空导弹的性能, 使其能快速跟踪过载指令; 文献[10]利用自适应高阶滑模设计了虚拟控制量, 建立了二次规划最优问题, 以分配虚拟控制量; 文献[11]利用最优控制理论设计了基于状态反馈的导弹俯仰通道控制回路, 并通过二次线性规划获得控制律, 针对直接力的干扰问题, 使用自抗扰理论构建了状态观测器抑制扰动; 文献[12]基于自抗扰控制方法减小了干扰对系统稳定性的影响, 通过在弹体前段增加若干个姿控发动机, 以提高系统的指令响应速度, 采用模糊控制设计了气动力与直接力的指令分配策略, 从而保证了导弹在较高飞行空域的快速响应能力。
本文对空空导弹俯仰通道进行建模, 并设计了三回路自动驾驶仪。 为了解决导弹在低动压下响应较慢的问题, 设计了直接力/气动力复合驾驶仪, 使用模糊控制对直接力部分进行开关控制, 并根据李雅普诺夫稳定性理论, 设计了基于状态空间输出反馈的模型参考自适应系统对复合驾驶仪进行优化。 仿真结果表明, 使用该方法后, 导弹对于跟踪加速度指令的性能明显提高。
1 直接力/气动力复合导弹模型
1.1 导弹气动布局
本文采用直接力/气动力复合导弹气动布局, 即导弹采用正常式布局, 尾部有4个舵面, 前段装有反安定面, 均呈X字型布局; 导弹尾端有6个尾喷口, 以满足三个通道的直接力控制。 弹体气动外形及直接力装置布局如图1所示。

图1 弹体气动外形及直接力装置Fig.1 Aerodynamic shape of missile and reaction thrust device
1.2 导弹动力学模型
由于导弹的俯仰运动与偏航运动本质上基本相同, 这里仅以俯仰通道为例进行控制系统设计。 本文采用的直接力装置产生的推力大小固定、 工作时间连续可控, 对于此直接力/气动力复合导弹, 在俯仰通道上的小扰动线性化方程[13]为
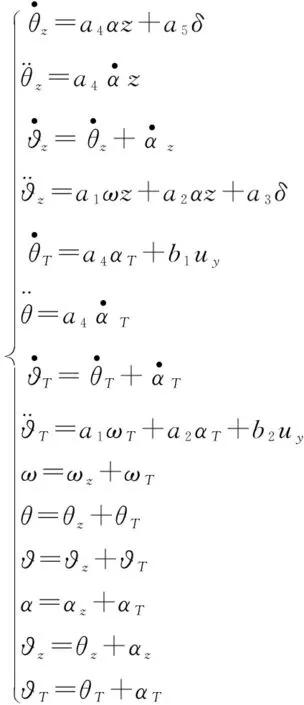
(1)


(2)
式中:
同时, 气动舵采用如下二阶模型:
(3)
直接力装置采用如下一阶模型:
(4)
2 导弹直接力/气动力复合自动驾驶仪设计
2.1 三回路自动驾驶仪设计
空空导弹飞行控制系统由导弹自动驾驶仪和导弹弹体动力学环节组成。 自动驾驶仪是实现导弹自动控制的重要部件, 其功能就是发出舵面偏转指令, 使弹体进行平动与转动, 从而实现导弹的稳定与控制。 本文采用三回路加速度驾驶仪, 其结构框图如图2所示。

图2 导弹三回路驾驶仪Fig.2 Three-loop autopilot of missile
其中, 三个回路分别为: 阻尼回路、 增稳回路和加速度回路。 阻尼回路的作用是增加系统阻尼; 增稳回路可以使弹体稳定性增加; 加速度回路采用闭环设计, 使输出能更好地追踪输入[14]。
当只有气动力作用时,uy=0, 则与直接力相关的输出量有AT=0,ωT=0, 由式(2)可得如下关系:
法向加速度传递函数为
(5)
角速度传递函数为
(6)

驾驶仪中的参数可利用频域设计法求出[15]:
(7)
(8)
(9)
(10)

根据不同的指标需求, 选取ωCR,ξ,τ合适的值, 即可得出驾驶仪所需参数。
2.2 直接力/气动力复合自动驾驶仪设计

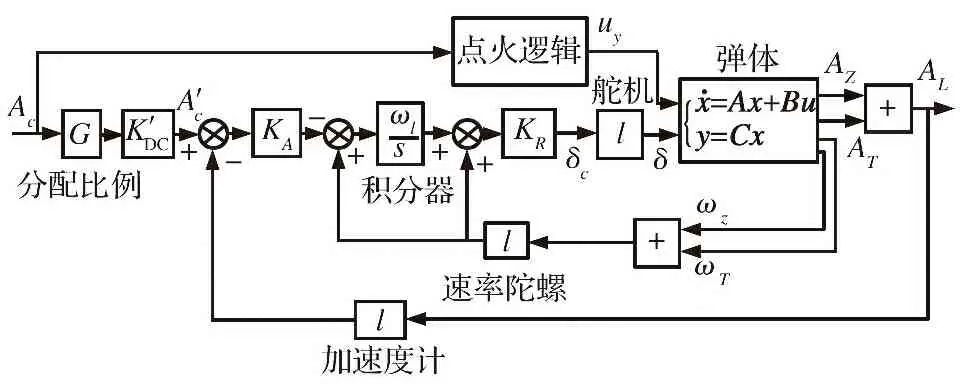
图3 直接力前馈控制Fig.3 Feed forward control of reaction thrust
3 自适应模糊控制器设计
3.1 基于模糊控制的直接力控制系统设计
对于本文设计的直接力/气动力复合自动驾驶仪, 其直接力工作时间及分配比例都是固定的, 在不同飞行状态下难以达到最高效率, 且驾驶仪部分参数需要重新设计。 为了更有效地利用直接力, 并简化驾驶仪设计过程, 使用模糊控制对直接力部分进行控制律设计。
模糊控制理论包括模糊集合理论、 模糊逻辑、 模糊推理及模糊控制等, 是采用模糊数学语言描述的控制律来操纵系统工作的控制方式。 模糊控制最大的特点就是反映了人的思维方式, 所以其本质也是一种语言控制器, 因此模糊规则易于构造, 容易通过软件实现。
加入模糊控制后的直接力/气动力复合控制模型如图4所示。 模型内所使用的T-S模糊控制器是一组由“if-then”语句组成的模糊控制器。 T-S模糊控制器的设计重点在于对隶属函数A的设计以及确定输出函数f(x)中的参数。
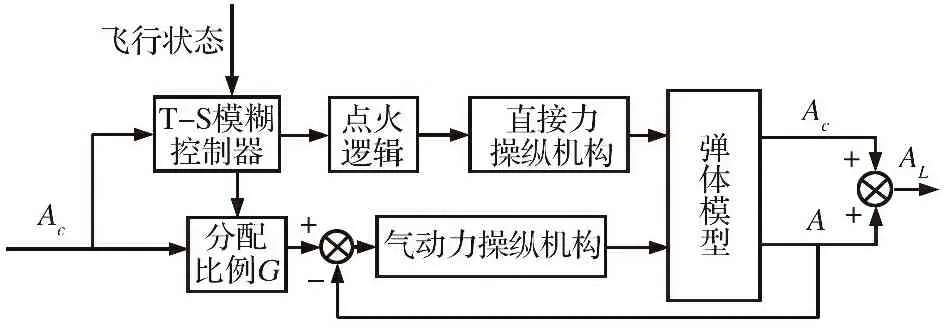
图4 直接力/气动力复合模糊控制系统Fig.4 Reaction thrust /aerodynamic compound fuzzy control system
以过载指令、 飞行状态(飞行高度、 马赫数等)作为输入, 以直接力机构输入ty、 气动力分配比例G作为输出, 采用如下模糊控制指令: “ifxiisAi, thenyj=fj(xi)(i=1, 2, 3;j=1, 2)”。 其中, 输入x1为加速度指令(m/s2),x2为飞行高度(km),x3为飞行马赫数,A1,A2,A3为对应的隶属函数; 输出y1为直接力控制时间(ms),y2为气动力分配比例G。
3.2 基于自适应控制的气动力控制系统设计
对于所设计的直接力/气动力复合控制系统, 在提高上升时间的同时, 超调量也会增大。 为了抑制超调量, 使加速度输出能够更好地追踪指令, 使用模型参考自适应控制对气动力部分进行调节, 提高整个系统的控制品质。
定理1(大范围一致渐近稳定理论)[17]
对于连续时间的非线性时变系统, 有
(11)
定理2
对于n维线性定常系统, 有
(12)
渐近稳定的充要条件是, 对给定的任一正定对称矩阵Q, 都存在唯一的对称正定矩阵P, 满足如下矩阵的李雅普诺夫方程:
ATP+PA=-Q
(13)
为方便计算, 矩阵Q通常取为单位阵I, 此时式(13)转化为
ATP+PA=-I
(14)
对于所建立的模型, 设计如图5所示的自适应控制系统[18], 可调系统的状态方程为

图5 具有可调增益的模型参考自适应控制系统结构图Fig.5 Block diagram of MRAC system with adjustable gain

(15)
式中:uc=F(t)u+G(t)y。
设参考模型状态方程为
(16)
则系统的广义输出误差向量为
e=ym-y
(17)
则

C(Ax+Buc)
(18)
将uc=F(t)u+G(t)y代入式(18)得
(19)

(20)
式中: *表示最佳取值。
将式(20)代入式(19), 有
(21)

用李雅普诺夫稳定性理论设计自适应律, 取李雅普诺夫函数为
(22)
式中:P1,P2,P3为正定对称阵。
则


(23)

(24)
(25)
故自适应律为
(26)
若e(t)=0, 根据式(21)有
(27)

4 仿真结果与分析
选取导弹在两个特征点进行仿真。 特征点1: 飞行高度20 km, 飞行马赫数2.5, 加速度指令100 m/s2。 特征点2: 飞行高度30 km, 飞行马赫数3, 加速度指令50 m/s2。 舵机模型参数ωδ=0.005,ξδ=0.6, 舵偏限幅-30°≤δ≤30°; 直接力装置模型参数τu=0.01, 单个尾喷管推力Ty=2 500 N。 在简单直接力/气动力复合控制中, 直接力作用时间50 ms, 分配比例G=0.5。 对于两个特征点, 分别有如下模糊规则:
Ifx1is 100 andx2is 20 andx3is 2.5, theny1=60,y2=0.625 1
Ifx1is 50 andx2is 30 andx3is 3, theny1=70,y2= -0.19
分配比例中出现负数值的原因是: 为了在低动压的情况下快速使导弹达到指令加速度, 直接力产生的加速度值已经超过了指令值, 因此需要气动舵产生一个负的加速度值, 以使导弹整体加速度等于指令加速度。
仿真曲线如图6~7所示, 图中蓝色虚线为输入指令的85%, 以此标准来判断上升时间。
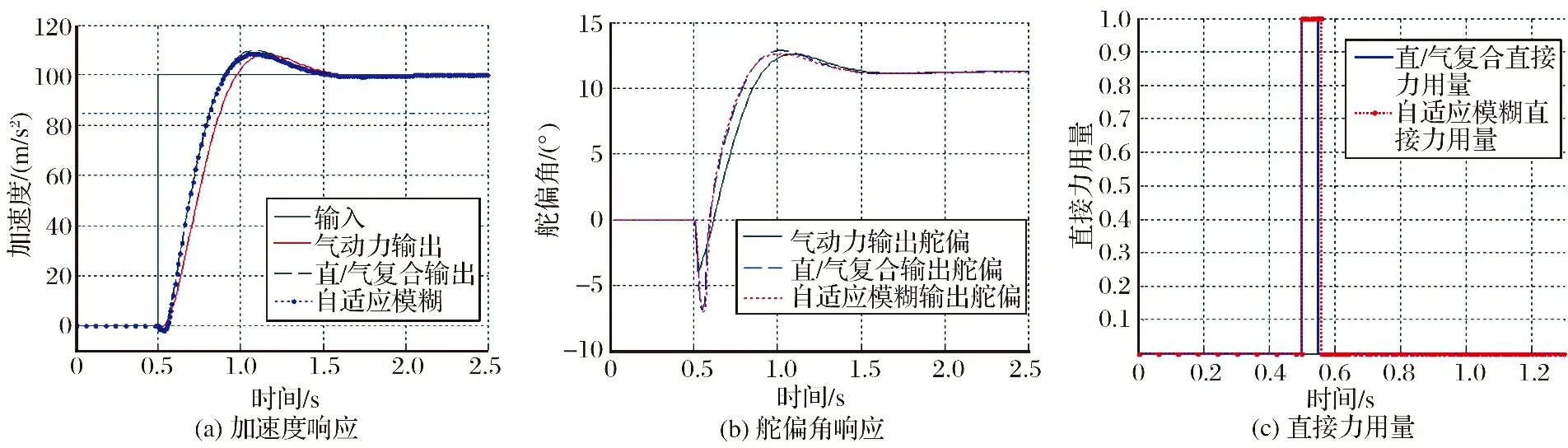
图6 特征点1Fig.6 Feature point 1
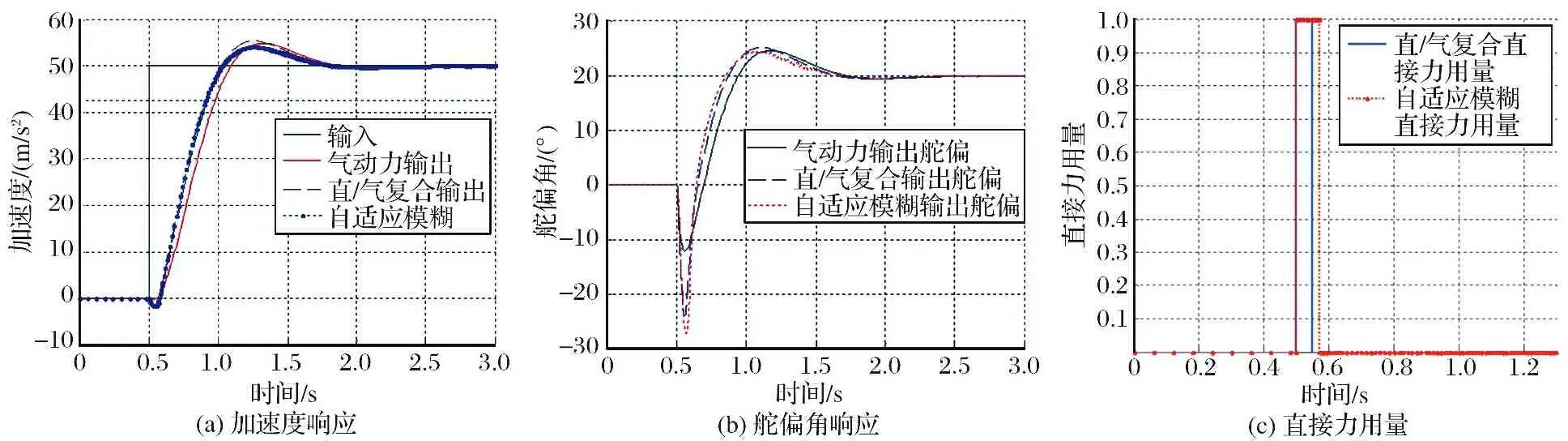
图7 特征点2Fig.7 Feature point 2
从图中不难看出, 相比于纯气动舵, 采用直接力/气动力复合控制方式能够显著提高系统的上升时间, 但同时也会使系统的超调量增大, 无法控制直接力作用时间; 使用模糊控制与自适应控制对直接力/气动力复合系统进行优化, 既能灵活调整直接力工作时间及直接力/气动力的分配比例, 同时在上升时间几乎不变的情况下使超调量大幅减小, 使加速度输出能够更好地跟踪输入指令。
5 结 论
本文针对空空导弹在高空低动压的情况下, 对于加速度指令响应较慢的问题, 设计了基于自适应模糊控制的直接力/气动力复合控制系统, 使用T-S模糊控制器对直接力进行控制, 使直接力在不同的飞行状态及加速度指令下能实现不同的工作时长, 不过该模糊控制器的规则设计过于依靠设计经验; 同时利用模型参考自适应对系统整体进行优化, 选取合适的参考模型, 提升系统控制品质。 通过仿真可以看出, 相比于纯气动舵自动驾驶仪, 基于自适应模糊控制的直接力/气动力复合控制系统具有更好的控制效果。
