基于放宽静稳定度空空导弹重定向研究
2023-02-24郭正玉
李 斌, 郭正玉
(1. 中国空空导弹研究院, 河南 洛阳 471009; 2. 空基信息感知与融合全国重点实验室, 河南 洛阳 471009)
0 引 言
以载机为中心的全向攻击方式, 大幅提升了空战灵活性和载机生存能力, 是下一代空空导弹的重要能力特征[1-2]。 典型作战想定下, 敌机处于载机后半球, 其携带的AIM-9X导弹导引头探测距离远大于有效攻击距离, 敌机可迅速完成发射后脱离。 若空空导弹具备后向攻击能力, 一是可打击处于载机后半球的敌机, 二是能拦截来袭的空空导弹, 大幅提升载机生存能力, 这给空空导弹总体性能设计带来了很大的挑战, 需要空空导弹能够快速、 安全、 稳定地将速度指向至载机后半球目标, 这就需要重定向设计技术。 提高转弯角速度和减小转弯半径能使前向发射空空导弹快速完成重定向, 是实现以载机为中心的全向攻击能力的关键技术。
空空导弹可采用纯气动力控制、 气动力/推力矢量复合控制、 气动力/直接力复合控制、 直接后向发射四种途径, 实现空空导弹弹头快速指向载机后方, 从而攻击载机后半球目标。
空空导弹通常是静稳定或临界稳定设计。 采用纯气动力控制时, 提高导弹可用攻角在增加全弹法向力的同时, 也增加了推力对导弹升力的贡献, 从而提高转弯角速度。 但显而易见的是, 在空空导弹的全空域和全速度域内, 受舵偏角度、 初始动压和操纵性、 稳定性等限制, 空空导弹可用攻角不会太大, 因此无法显著提高导弹的敏捷性。
气动力/推力矢量和气动力/直接力复合控制的主要优点之一就是提高了空空导弹的可用攻角, 在低动压条件下也能具有较大的转弯角速度, 从而具备大离轴状态的越肩发射能力[3], 实现对载机后半球目标的攻击。 采用气动力/推力矢量复合控制导弹, 其典型最大转弯角速度[3-4]约70 (°)/s~100 (°)/s, 同时考虑起控时间等因素, 前向发射空空导弹转向时间[5]需要约3 s, 给敌机攻击和脱离留下较大的时间窗口, 对载机威胁性高。 此外,气动力/推力矢量复合控制需要发动机处于工作状态, 在空空导弹持续转弯过程中, 大攻角引起的阻力和推力损失大幅降低了空空导弹动能, 从而降低了导弹对载机后半球目标的有效攻击距离。 为减少空空导弹在转弯过程中的能量损失, 俄罗斯最早提出并实现了直接后向发射空空导弹[6], 但是直接后向发射空空导弹需要消耗宝贵的作战响应时间用于旋转发射装置, 给载机平台结构和飞行性能带来了不利的影响。
文献[7-9]分别针对细长体导弹模型研究了抛接定向、 过失速重定向和自翻转方法, 文献[5, 7-8]都是在发射后利用姿控直接力调整导弹姿态完成重定向。 文献[7]重点设计了制导律, 并进行了仿真验证。 文献[8]重点对预置舵偏等影响重定向因素进行了分析, 并认为由于发射时导弹静稳定影响, 采用气动舵偏无法完成重定向, 必须同时引入直接侧向力控制。 文献[9]采用CFD方法研究了大攻角气动特性, 提出弹体和气动舵的松耦合计算模型, 验证了自翻转可行性, 但重定向后弹体俯仰角速度约20 rad/s。 文献[10-12]对可重复使用火箭再入着陆段的转向过程进行了仿真, 得到超0°~180°范围大攻角流场结构细节, 并给出涡结构、 动态特性对气动特性的影响, 但仿真模型为长细比不大于5的非圆截面火箭, 马赫数为0.1, 与空空导弹使用条件差异较大。
为解决重定向过程中, 直接力/气动舵复合控制能量损失大[7-8]、 自翻转重定向后俯仰角速度过大[9]等不足, 本文根据空气动力学细长体理论和粘性横流理论分析, 提出了基于放宽静稳定度的空空导弹重定向设计, 实现了导弹在纯气动舵控制下完成快速、 稳定、 安全的重定向。 典型状态仿真结果表明, 所提出的基于放宽静稳定度的重定向技术能够使导弹在1.15 s内完成重定向, 且重定向后导弹俯仰角速度稳定。
1 空空导弹重定向过程设计
本文采用放宽静稳定度技术[13-14], 利用弹体静不稳定性和纯气动舵控制方式实现重定向。
基于放宽静稳定度的空空导弹重定向过程如下:
(1) 载机利用作战体系支持或自身后向雷达获取目指信息, 在火控辅助下适时弹射发射空空导弹。
(2) 假设载机平飞, 机弹分离时导弹有初始负俯仰角、 低头角速度、 向下速度。
(3) 在放宽静稳定度设计条件下, 采用纯气动舵控制空空导弹产生低头力矩、 低头角加速度、 低头角速度, 俯仰角(攻角)继续增大。 需要说明的是, 在导弹绕质心转动过程中, 姿态和攻角是快变量, 弹道倾角约为0°, 即导弹速度仍保持前向, 近似认为弹体俯仰角为攻角。
(4) 导弹实现安全、 快速、 稳定转向后, 其角速度接近0 (°)/s或数值较小, 攻角接近180°。 因此导弹在转向过程中, 俯仰角速度应呈现先增加再减小的过程, 俯仰力矩是重定向过程中重要的气动参数。
(5) 空空导弹在转向过程中, 气动舵面适时进行姿态稳定控制。
(6) 发动机适时点火, 导弹速度经历由负变正的过程[15], 导弹以迎头态势攻击目标。
为了在重定向后获得更好的飞行品质, 提出完成重定向的运动学标志如下:
(1) 导弹与载机实现安全可靠分离。
(2) 导弹头部指向改变接近180°, 本文限制在175°~185°范围。
(3) 弹体俯仰角速度接近0 (°)/s, 本文限制在±30 (°)/s范围。
(4) 重定向过程中弹体姿态稳定。
(5) 导弹发动机正常点火, 并实现导弹速度方向反向。
2 导弹重定向过程气动特性
攻角0°~180°范围导弹气动特性是空空导弹完成重定向的基础。
细长旋成体大攻角气动特性已有较多的研究[16-18], 但对攻角超过90°的气动研究不多。 早期, 文献[19]根据细长体理论和粘性横流理论给出了攻角0°~180°的细长体气动参数计算公式, 文献[20]给出了攻角-5°~180°超音速变截面细长体的风洞试验结果。 近期, CFD方法广泛用于超大攻角气动特性研究[8-12, 21-22], 文献[21-22]采用数值模拟与油流显示风洞试验结合的方法来研究细长体在攻角0°~180°范围内的非定常流动特性。
本文以简单的鸭式舵身组合体为研究对象, 采用文献[19]给出的工程计算公式, 获取0°~180°攻角范围内的静态气动数据。
全弹法向力系数cn计算公式[19]如下:
全弹俯仰力矩系数mz和轴向力系数ca计算公式[19]如下:
当0°≤α≤90°时,α′=α, 则

ca≈caα = 0°(cosα)2
当90°≤α≤180°时, α′=180°-α, 则

ca≈caα = 180°(cosα)2
其中:Ar,Ab,Ap分别为导弹参考面积、 底部面积、 横向投影面积;Vb为导弹体积;D为参考长度;xm,xc分别为导弹质心和横向投影面的型心;η为横流比拟因子;cdn为横流阻力系数。
Jorgensen[23]进一步将上述公式推广至翼身组合体的计算。
2.1 俯仰力矩特性分析
大攻角气动力和力矩源于位势流和粘流两部分。 以长细比18的细长圆柱体为例, 根据细长体理论和粘性横流理论给出法向力和俯仰力矩系数, 如图1~2所示。 粘性横流理论产生了较大的法向力, 尤其是在90°攻角时, 法向力全部来自粘性横流理论; 细长体位势流理论对法向力贡献很小, 但对俯仰力矩影响很大。

图1 法向力系数Fig.1 Normal force coefficient

图2 俯仰力矩系数Fig.2 Pitching moment coefficient
根据粘性横流理论, 俯仰力矩符号取决于质心到形心的距离, 横流理论对俯仰力矩贡献在0°~180°攻角范围内符号是固定的。 因此总俯仰力矩存在三种情况: 当质心与形心重合, 粘性横流理论给出的俯仰力矩系数为零, 细长体理论给出的俯仰力矩使导弹先抬头再低头, 且mz在整个攻角范围内做功为0 J, 可实现稳定重定向, 但是因俯仰力矩量值较小, 不能快速重定向; 当质心在形心之前, 粘性横流理论给出的俯仰力矩系数在整个攻角范围内大于零, 在整个攻角范围内做功为正, 导弹角速度一直增大, 导弹无法完成稳定重定向; 当质心在形心之后, 粘性横流理论给出的俯仰力矩系数在整个攻角范围内小于零, 在整个攻角范围内做功为负, 导弹始终存在低头力矩, 在不考虑初始角速度时无法完成重定向。 实际上导弹质心与形心一般不会重合, 因此细长旋成体很难依靠自身气动力完成快速、 稳定转向, 必须增加升力面或直接力等力矩控制方式。
2.2 气动特性预计
本文采用文献[22]中的鸭式舵身组合体模型, 如图3所示, 长细比18, 弹径40 mm, 鸭式舵面呈“X”型布局, 质心距头部顶点396 mm。 弹体坐标系原点位于导弹质心,x指向导弹头部,y如图所示为正,z由右手定则定义。

图3 导弹模型Fig.3 Missile model
文献[22]给出了Ma=0.6、 零舵偏角的气动数据, 但未给出非零舵偏角的气动数据, 仅有的零舵偏角气动数据无法满足重定向过程仿真。 本文采用Jorgensen工程方法[19]给出了不同舵偏角的气动数据, 并将零舵偏角的气动数据计算结果与文献[22]对比, 如图4~5所示, 图中CFD和Exp.分别表示数值仿真和风洞试验结果。 对比结果表明, 对于简单气动外形, 工程理论方法能较准确预测导弹气动特性,cn和mz随攻角变化规律基本一致, 在60°~130°范围内,mz工程计算结果偏大, 压心更靠前, 大攻角非线性俯仰力矩预测结果精度较差。 本文采用Jorgensen工程方法给出气动数据。

图4 法向力系数随攻角变化Fig.4 Variation of normal force coefficient with angle of attack
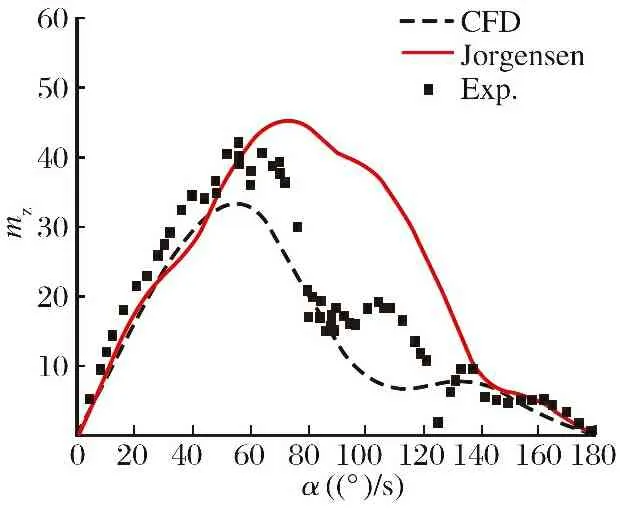
图5 俯仰力矩系数随攻角变化Fig.5 Variation of pitch moment coefficient with angle of attack
俯仰力矩与角加速度成正比, 当mz>0时导弹的角速度增加, 当mz<0时导弹的角速度减小, 若要实现稳定的重定向, 俯仰力矩在0°~180°攻角范围内做功应为0 J, 即重定向结束时的俯仰角速度接近0 (°)/s(或等于初始角速度), 因此导弹俯仰角速度是一个先增大后减小的过程。 理论上来讲, 从俯仰力矩随攻角的变化规律, 可定性地判断能否完成稳定重定向。 在采用放宽静稳定度设计时, 纯气动舵控制可在重定向初始段给出更大的俯仰力矩, 实现快速重定向, 显然重定向末段也要用俯仰气动舵反向控制。
气动外形一定时, 静不稳定主要取决于质心位置, 图6给出了取质心xm分别为0.296 mm, 0.316 mm , 0.336 mm和0.356 mm, 即7.4D, 7.9D, 8.4D和8.9D对应的俯仰力矩随攻角α变化曲线。 图中, +δp和-δp分别为俯仰通道可用舵偏边界值。
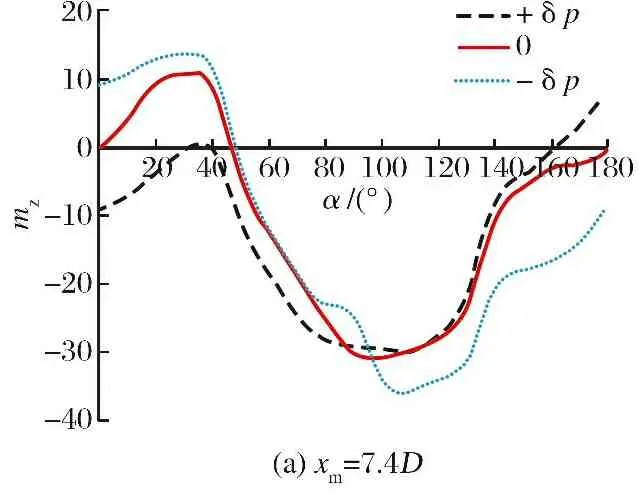
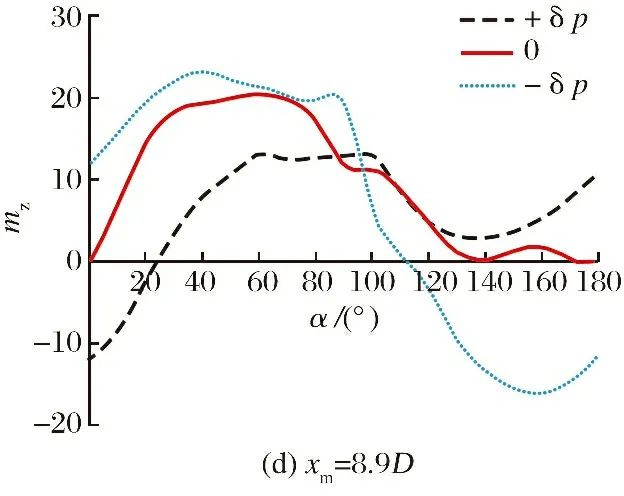
图6 俯仰力矩系数Fig.6 Pitching moment coefficient
在不考虑动态气动阻尼特性情况下, 从俯仰力矩系数随攻角变化曲线可以判断, 只有在xm=8.44D时,mz在重定向过程中的平均值接近零, 即图中俯仰力矩系数mz曲线与x轴间阴影面积为零。
当静稳定度比较大时, 导弹无法在纯气动舵控制下完成重定向, 即mz在重定向过程中的平均值小于零, 转向小于180°, 文献[8]给出了类似结果; 同理, 当静不稳定度较大时, 导弹无法在纯气动舵控制下完成重定向, 即mz在重定向过程中的平均值大于零, 转向180°时角速度过大。
3 空空导弹重定向结果
典型仿真条件为: 飞行马赫数Ma=0.6, 高度H=6 km, 载机平飞, 前向弹射发射导弹; 导弹质心xm=8.4D; 导弹初始攻角α=-2°, 初始俯仰角速度ωz=-10 (°)/s, 速度vy=-10 m/s。
质量等物理参数通过Fleeman给的战术导弹分系统平均密度计算[24], 本文图3模型质量为1.3 kg, 俯仰转动惯量为0.16 kg·m2。
3.1 运动方程组
在导弹重定向过程中, 导弹发动机不工作, 推力P=0 kN, 质量m为常值。 导弹纵向运动方程组如下:
α=ϑ-θ
其中:V为速度;Mz为俯仰力矩;Cn和Ca分别为法向力和轴向力;Jz为转动惯量;ωz为俯仰角速度;α为攻角; ϑ为俯仰角;θ为弹道倾角。
3.2 仿真结果分析
典型仿真结果如图7所示, 图中ωz表示导弹俯仰角速度;α表示导弹攻角。
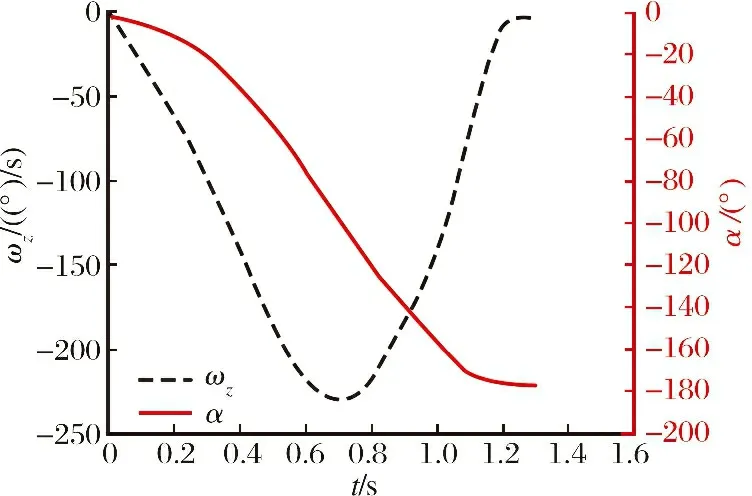
图7 运动参数(xm=8.4D)Fig.7 Kinematic parameters (xm=8.4D)
在t=0.65 s之前, 导弹俯仰角加速度大于0 (°)/s2, 俯仰角速度ωz持续增大, 俯仰角ϑ增大, 攻角α增大; 在t=0.65 s之后, 导弹俯仰角加速度小于0 (°)/s2, 俯仰角速度ωz持续减小, 俯仰角ϑ增大趋势放缓但仍增加, 攻角α继续增大, 按照本文假设完成重定向运动标志, 在t=1.15 s时, 俯仰角176°, 俯仰角速度25 (°)/s, 全弹完成快速稳定重定向。 重定向后导弹在160°~180°攻角范围内仍然具有较强的俯仰控制能力, 如图6(c)所示。
机弹分离轨迹如图8所示, 图中按照时间步长t=0.1 s给出了导弹运动轨迹, 同时给出导弹运动姿态。 由图11可知, 机弹分离后, 导弹在纯气动力矩作用下迅速低头, 俯仰角速度增大, 攻角增大, 全弹诱导阻力增大, 使导弹x向运动速度增大, 当导弹头部指向后方, 诱导阻力减小,x向运动速度减小。 这与正常弹射导弹分离轨迹趋势差异较大, 因此尤其需要注意重定向过程中机弹分离安全性。

图8 运动轨迹Fig.8 Kinematic trajectory
在典型仿真条件基础上, 改变飞行高度、 速度和初始角速度, 评估其对导弹重定向过程的影响。
图9~10分别给出了高度H=10 km、Ma=0.8时, 导弹重定向的过程参数, 完成重定向时间分别为1.45 s和1.05 s。
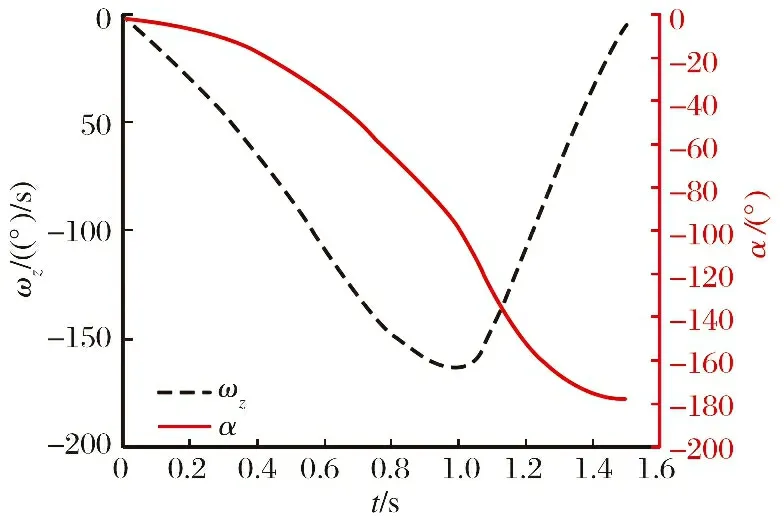
图9 运动参数(H=10 km)Fig.9 Kinematic parameters(H=10 km)

图10 运动参数(Ma=0.8)Fig.10 Kinematic parameters (Ma=0.8)
图11给出了初始角速度为-11.5 (°)/s时导弹重定向的过程参数, 完成重定向时间为1.10 s。

图11 运动参数(ωz0=-11.5 (°)/s)Fig.11 Kinematic parameters (ωz0=-11.5 (°)/s)
在采用xm=8.4D的俯仰力矩系数时, 随着动压的增大, 导弹所受俯仰力矩增大, 俯仰角速度增大, 完成稳定重定向时间更小, 因此飞行高度越低、 速度越大, 对应的稳定重定向时间越小。
在本文给定初始角速度范围, 角速度值对稳定重定向时间影响较小。
4 重定向关键问题分析
基于放宽静稳定度的空空导弹重定向设计中, 导弹俯仰力矩起到了至关重要的作用。 在此进一步讨论重定向过程中, 总体设计需要着重考虑的问题。
4.1 前后向兼顾设计
以载机为中心的全向攻击, 要求空空导弹既能攻击载机前侧向目标, 又能攻击载机后半球目标。 因此, 空空导弹在总体设计和使用过程中, 需要兼顾前侧向攻击和后向攻击。 本文在已有采用气动力/推力矢量复合控制方式实现前侧向攻击的空空导弹基础上, 提出弹体采用放宽静稳定度设计, 利用静不稳定力矩实现重定向。 然而静不稳定度并不是越大越好, 其上限受控制系统带宽限制[14, 25]。 总体设计中还必须兼顾考虑全弹结构和气动设计, 综合评估质心和压心相对位置, 既能满足高低速、 主被动段、 STT控制对弹道过载需求, 又能满足快速稳定重定向需求。
4.2 横纵向兼顾设计
在重定向过程中, 导弹攻角从0°迅速增加到180°, 在大攻角飞行时导弹背风区会形成复杂的非定常、 非对称涡系, 诱导出随时间变化的非线性偏航力和力矩, 其量值甚至与法向力和力矩相当, 同时可能存在对称状态诱导的滚转力矩。 此外, 大攻角飞行时气动舵面效率大幅下降, 甚至无法进行稳定控制。 因此, 必须采取流动控制方法, 控制流动分离、 涡强和位置[26], 以减小或消除大攻角侧向力和力矩, 如可偏转头部外形[27]、 头部边条小翼[28]、 有源微吹起控制[29]等。
需要注意的是, 侧向力和力矩通常是非定常, 具有较高的频率[22], 控制系统设计应评估其影响。
4.3 其他考虑
采用放宽静稳定度实现重定向方法, 在大攻角状态时气动舵控制能力较低, 更应充分分析机弹分离主要运动特点[30], 评估机弹分离安全性。 此外, 还要重视作战使用中载机流场干扰影响, 例如在载机压坡度进行水平稳定盘旋时, 载机保持攻角飞行。 导弹弹射后其存在攻角, 在静不稳定作用下, 导弹飞向载机, 可能存在安全性影响。
导弹快速稳定完成重定向时, 弹体尾部处于高压区, 即发动机点火时其外部环境压力较高, 尤其是在转向后若处于高速飞行, 激波后恢复压力更大。 当恢复压力较高时, 发动机出流可能处于欠膨胀状态, 降低了发动机推力。
5 结 论
针对以载机为中心全向攻击需求, 本文提出了基于放宽静稳定度的空空导弹重定向方法, 并提炼了实现重定向的运动学标志: 安全、 快速和稳定。 仿真结果表明, 采用本文提出的重定向方法, 导弹能在纯气动舵控制下完成重定向, 典型状态重定向时间不大于1.15 s。 采用纯气动舵控制完成导弹重定向, 具有重定向时间短、 转弯半径极小、 未损失发动机能力等优势, 间接提升了导弹的后向动力射程。
考虑到目前的仿真是在比较理想的假设条件下得出的结论, 后续可采用多种试验方法获取更细致的大攻角气动特性, 进一步验证工程实施可行性; 此外, 还可分析参数敏感度, 评估飞行参数、 分离参数、 导弹物理参数等对重定向过程影响, 同时可分析动态阻尼特性对重定向过程影响。
